
Automated Low-Cost Soil Moisture Sensors: Trade-Off between Cost and Accuracy
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
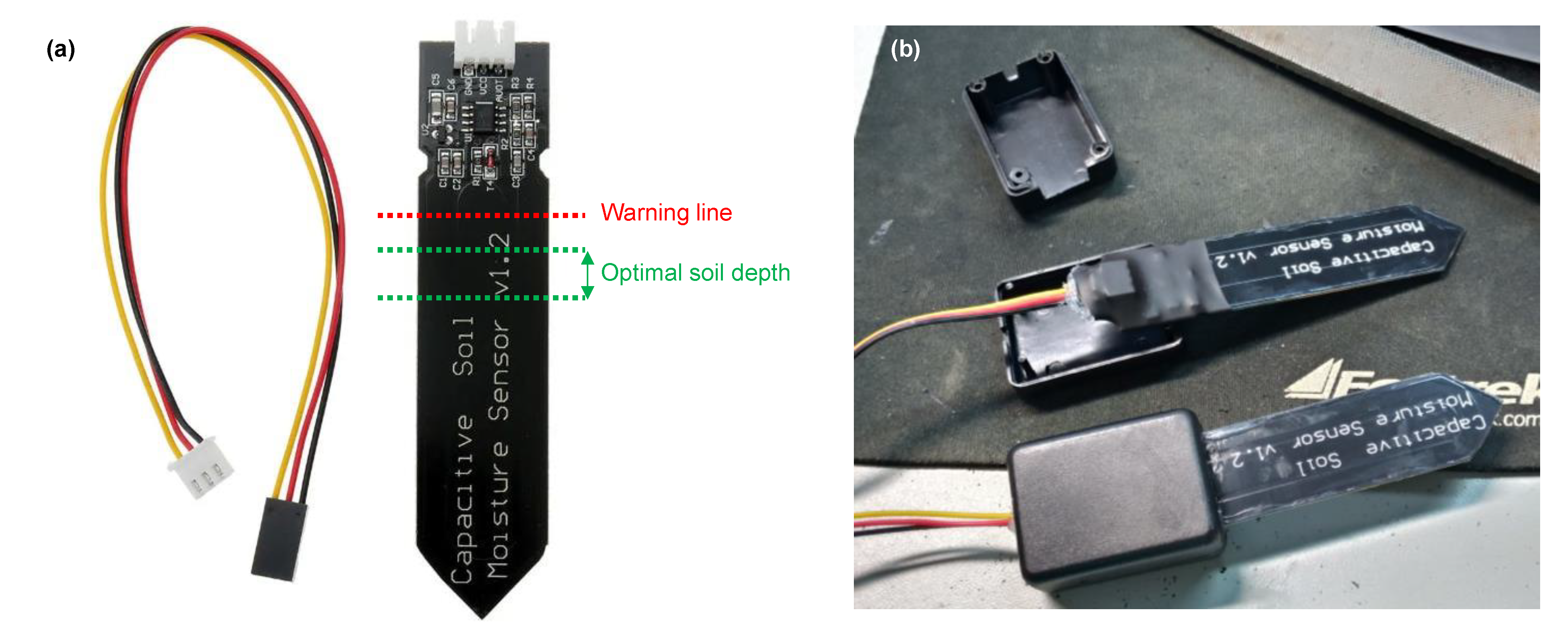
2.1. SKU Sensor Description and Theory
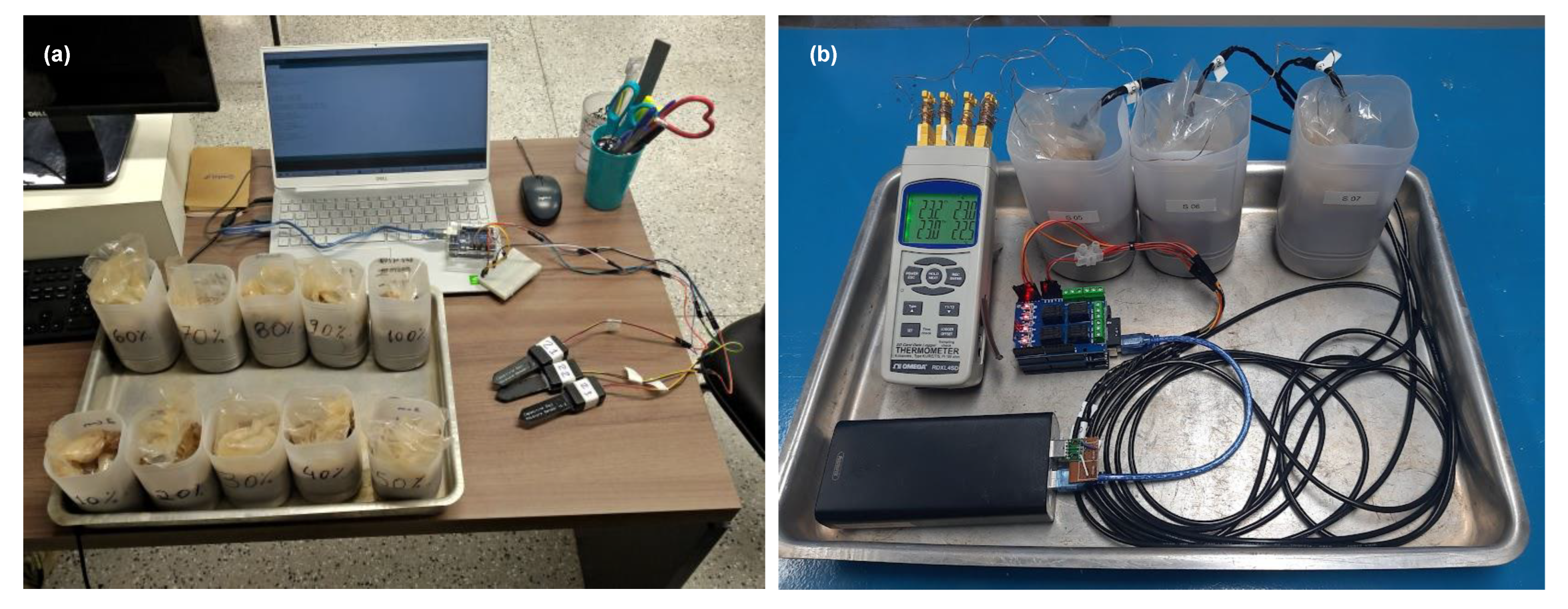
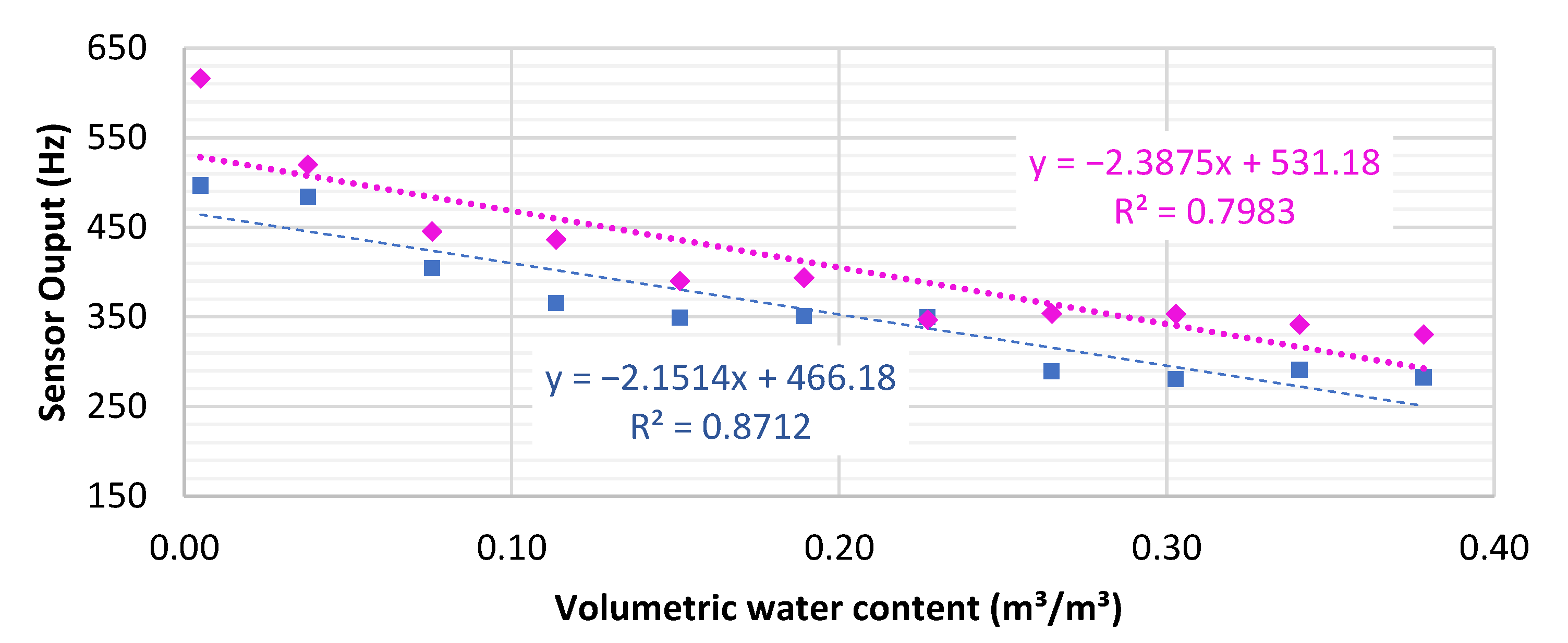
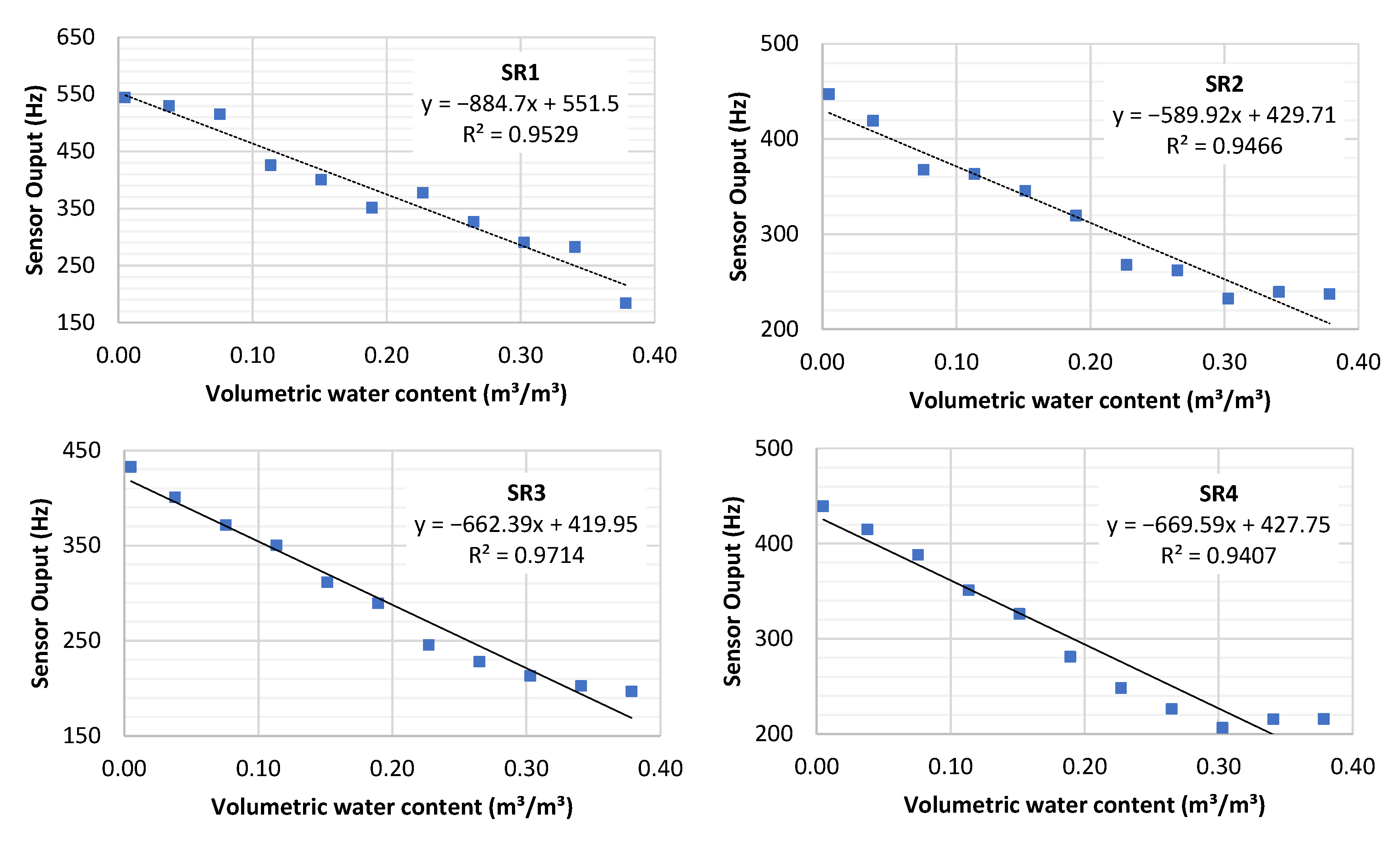
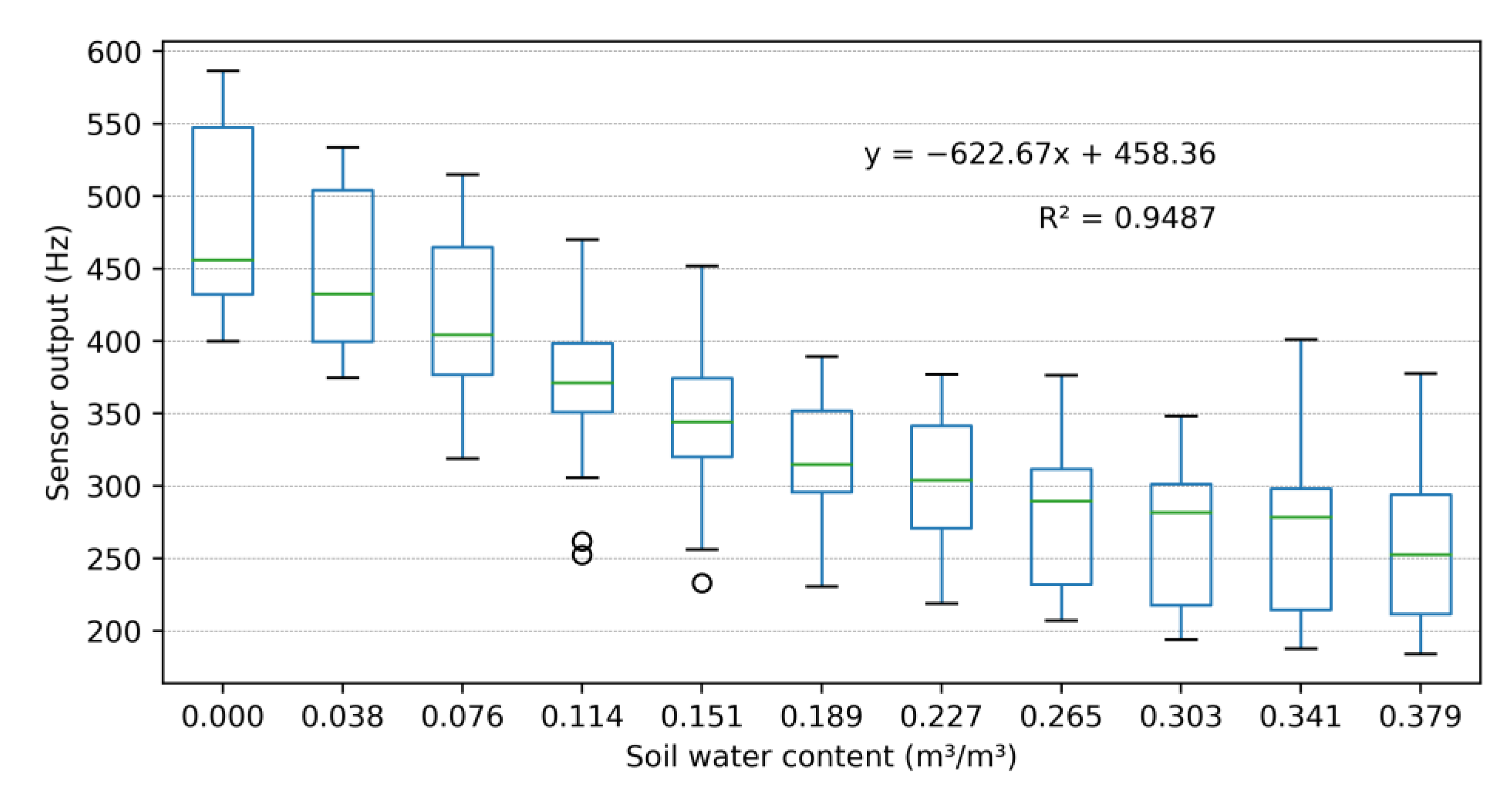
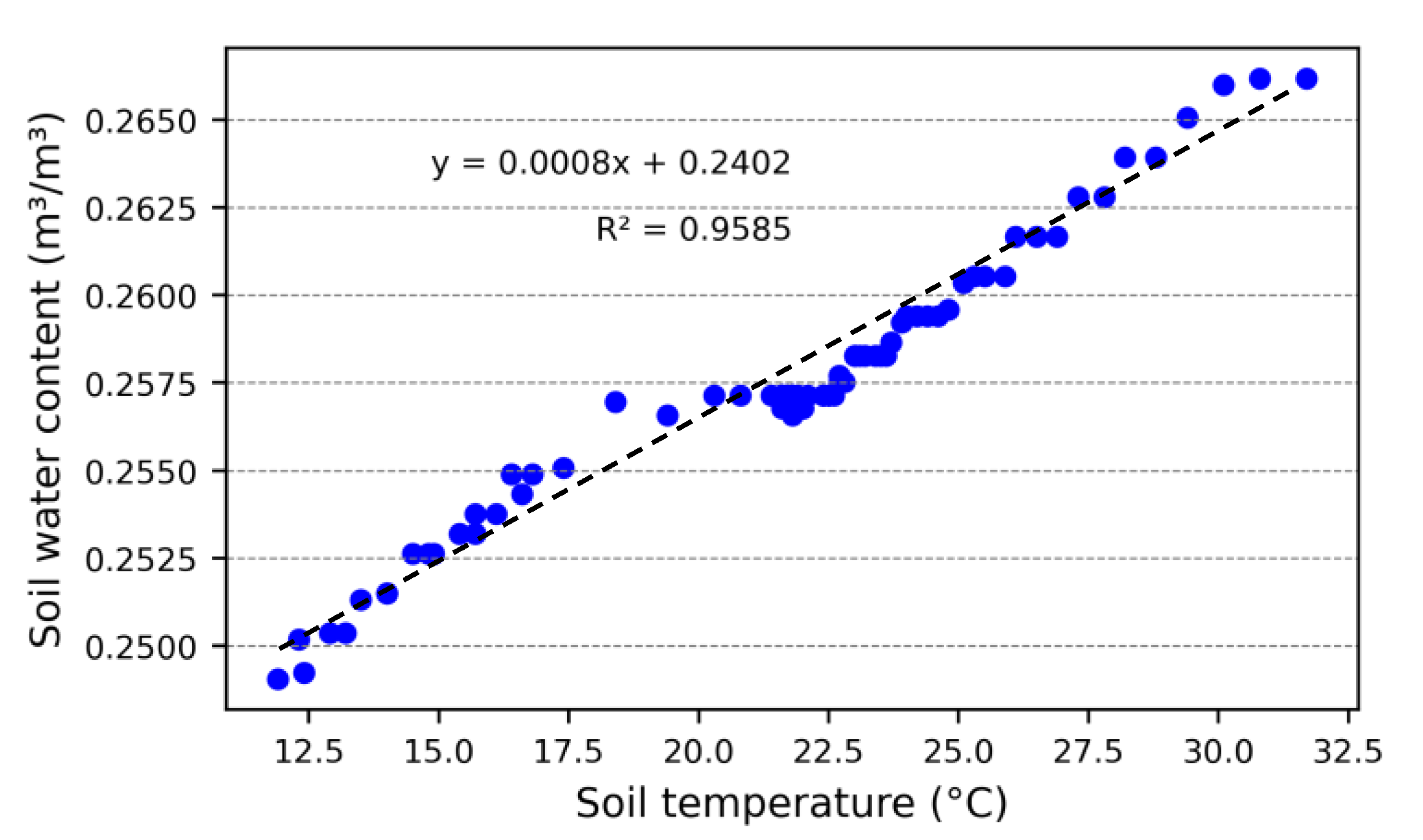
2.2. Initial Tests and Calibration
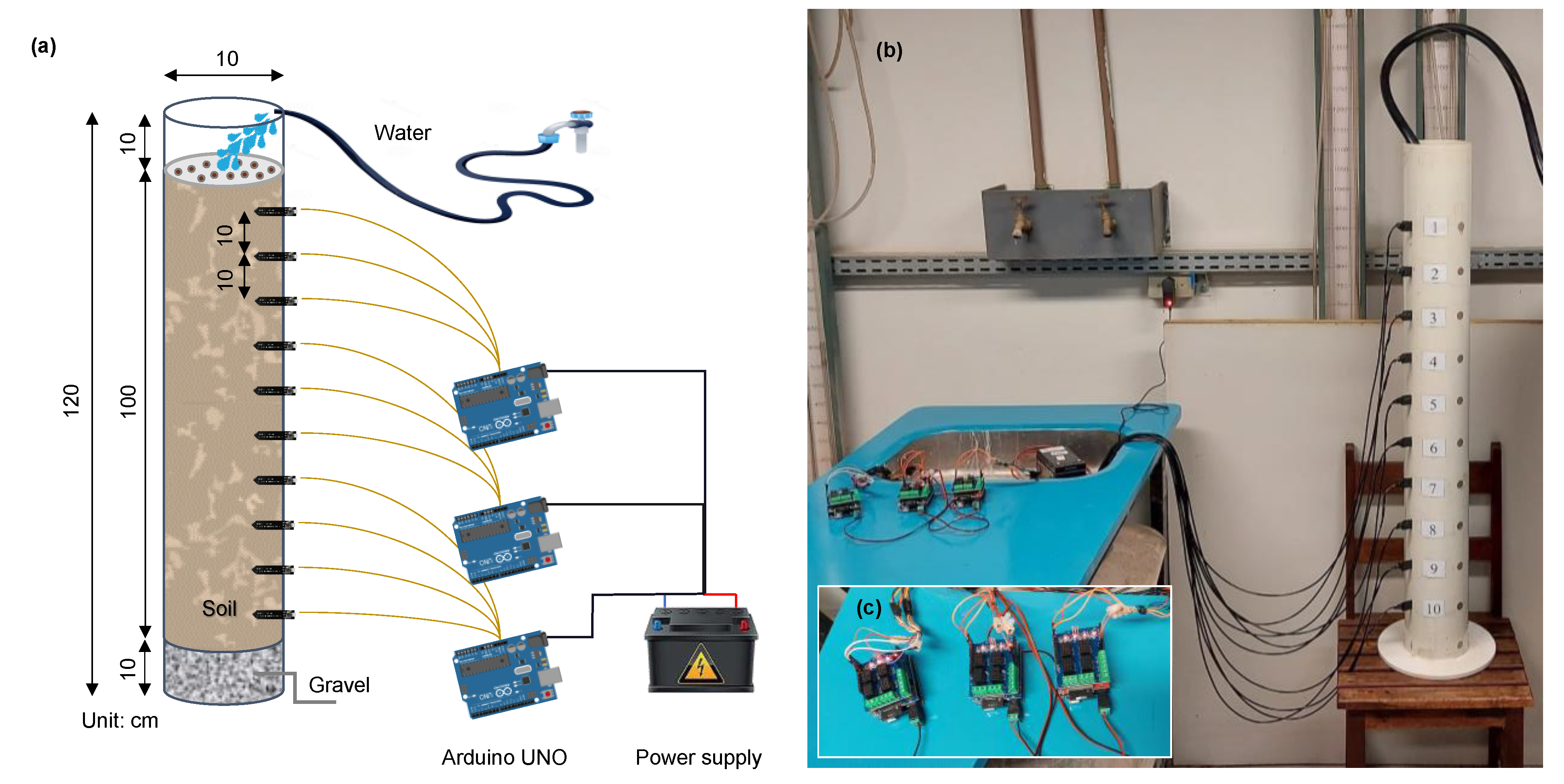
2.3. Laboratory Test: Infiltration Column
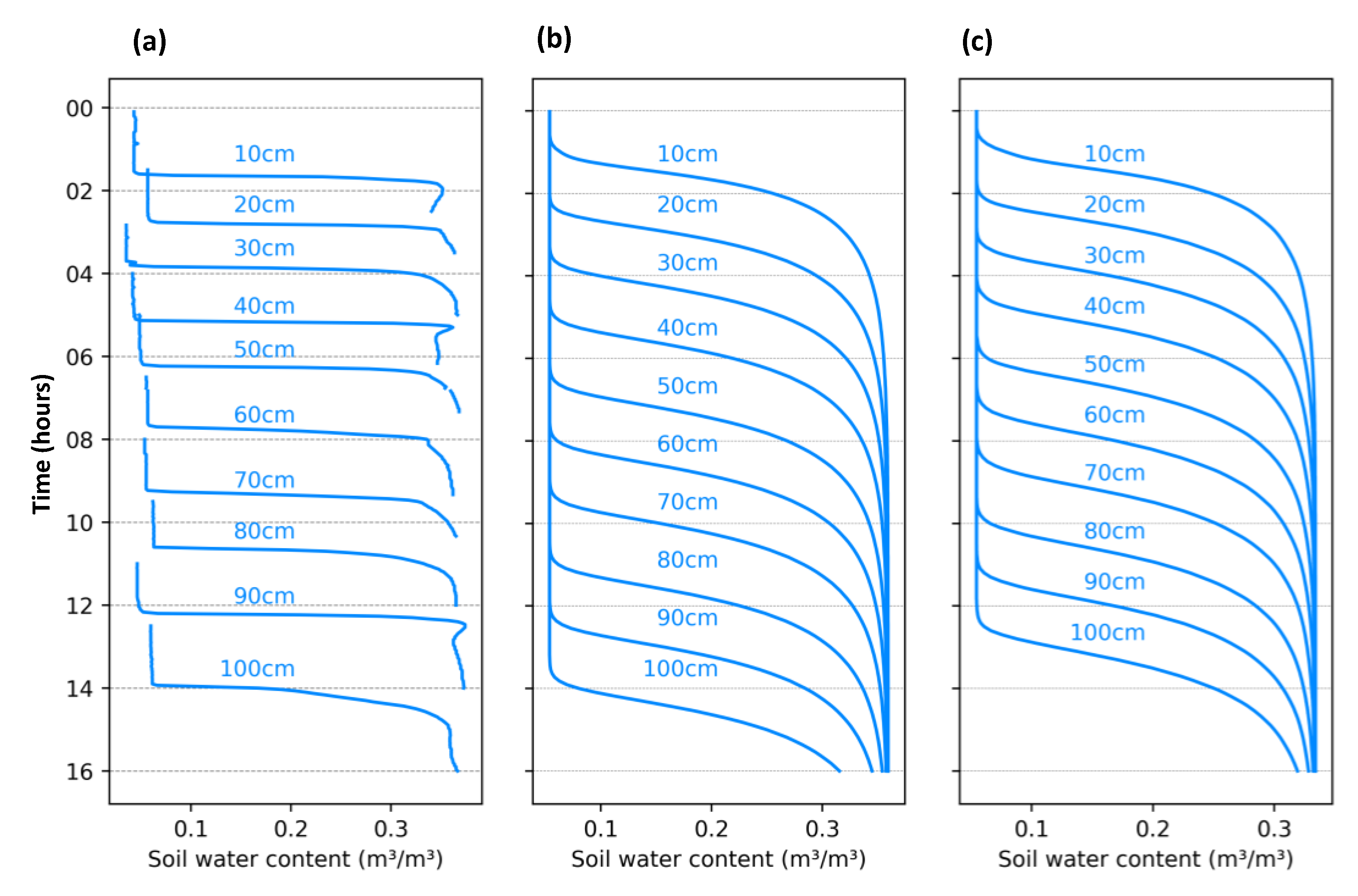
2.4. Wetting Front Simulation
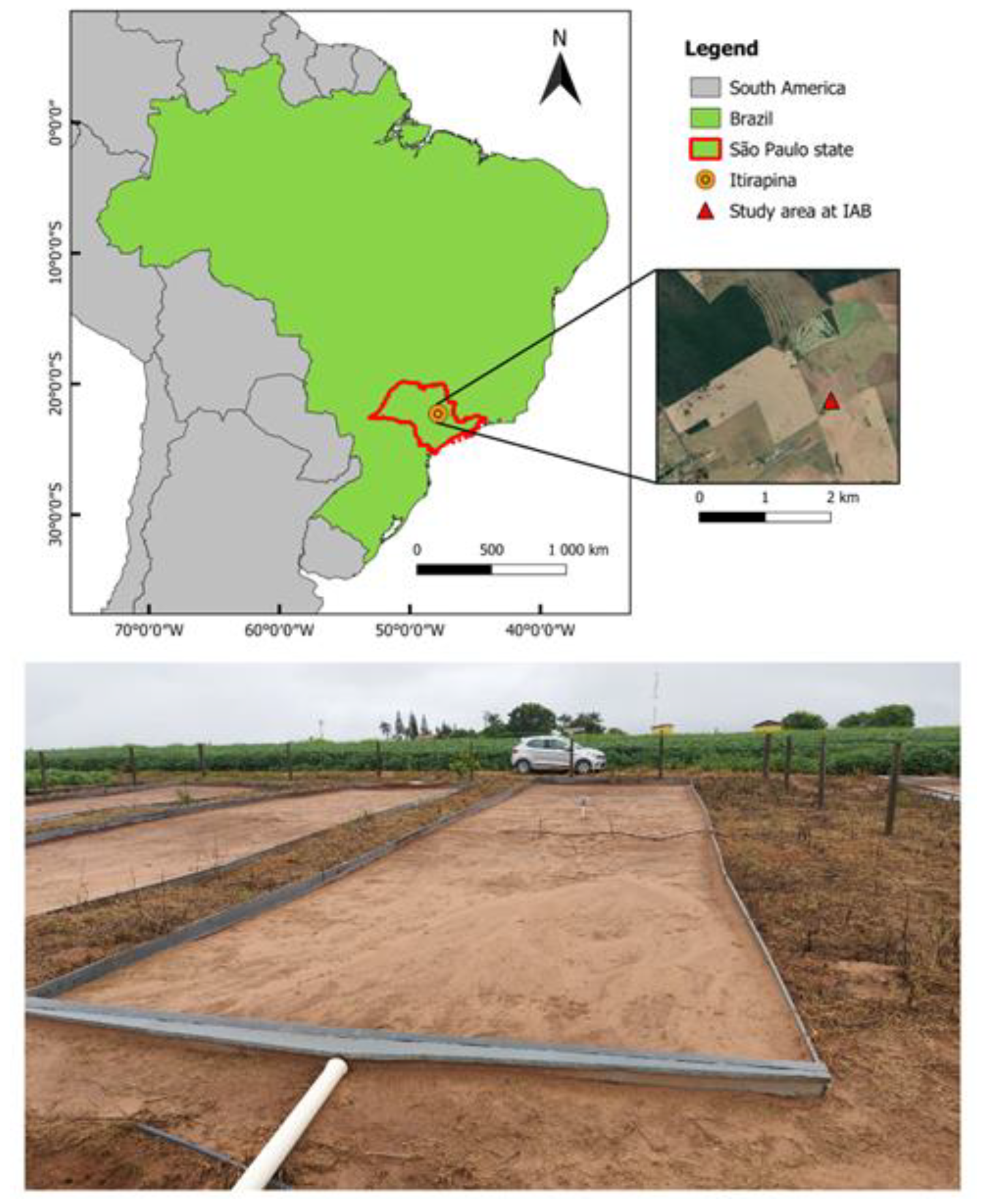
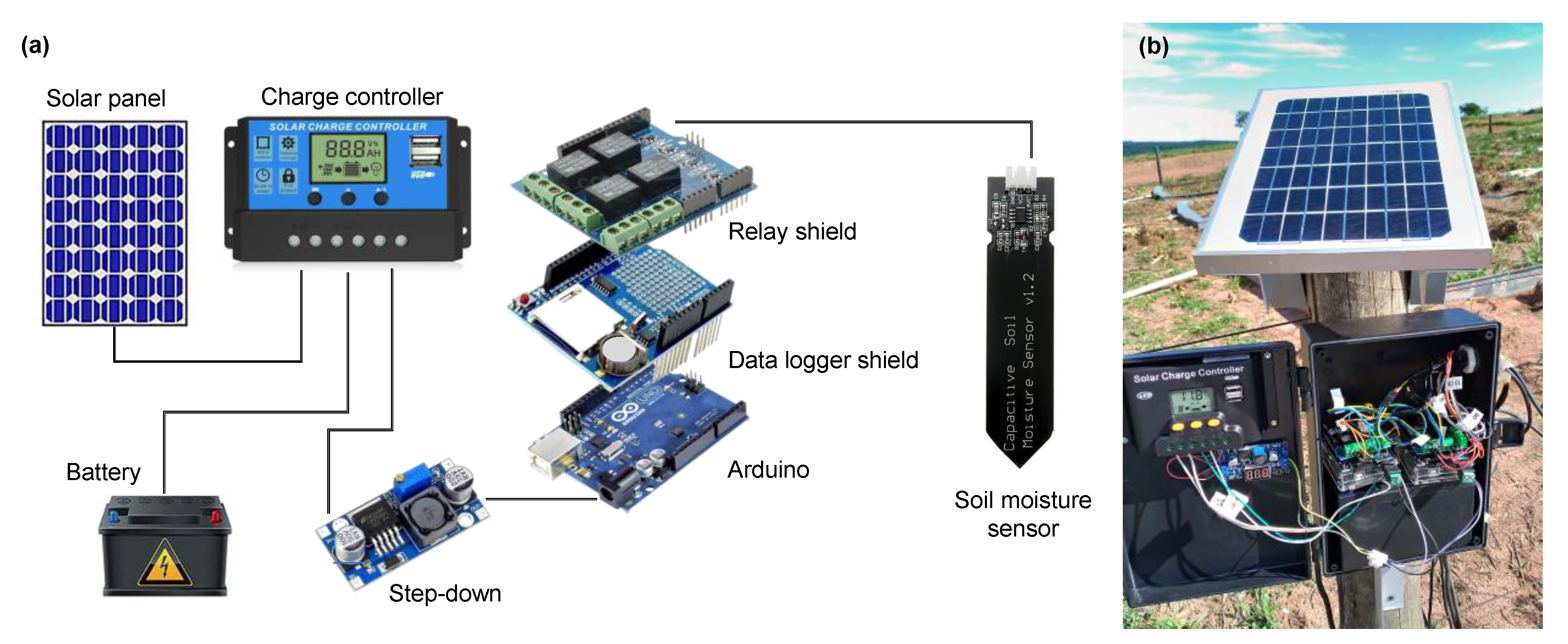
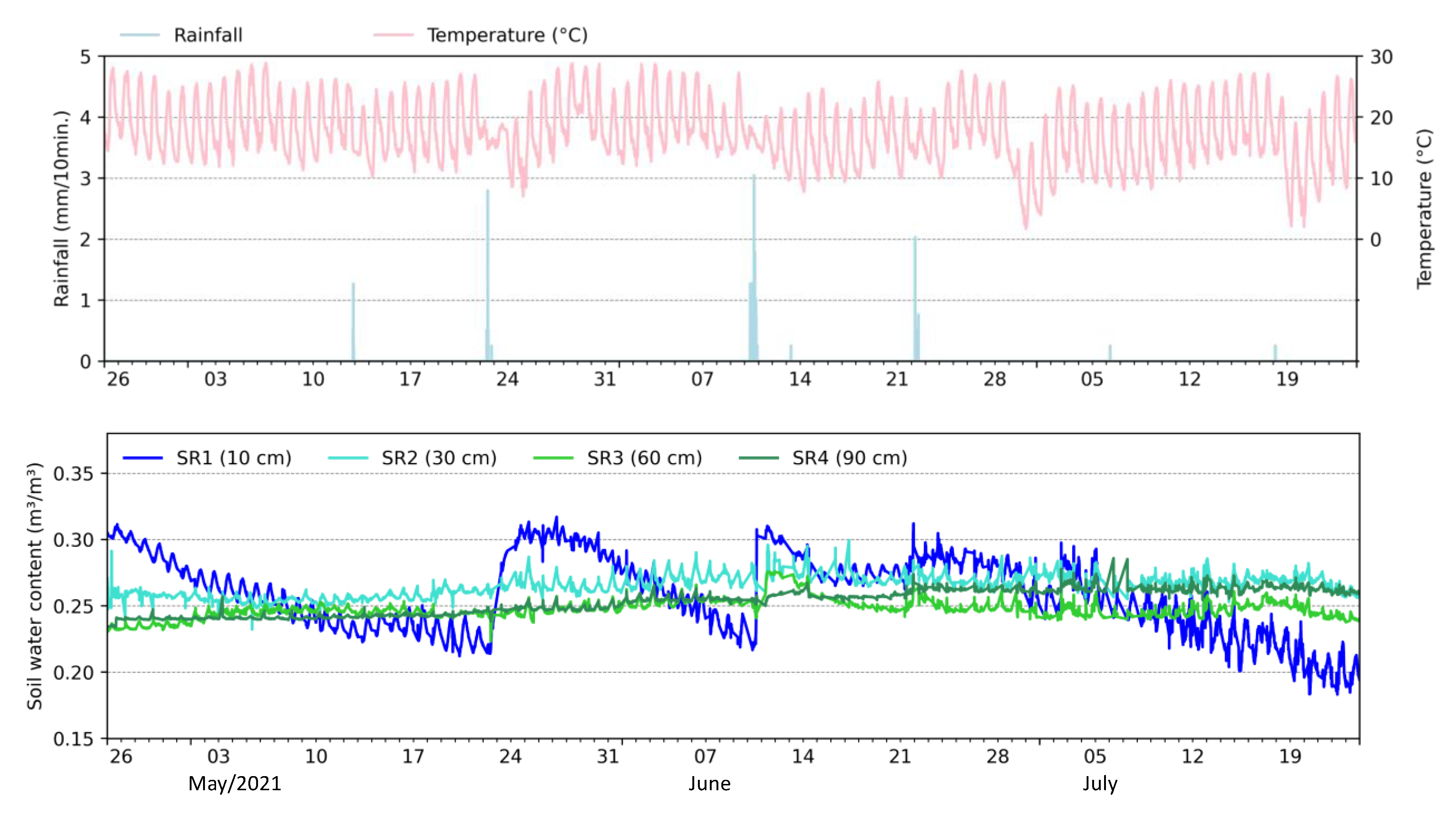
2.5. Field Tests and Study Area Description
3. Results
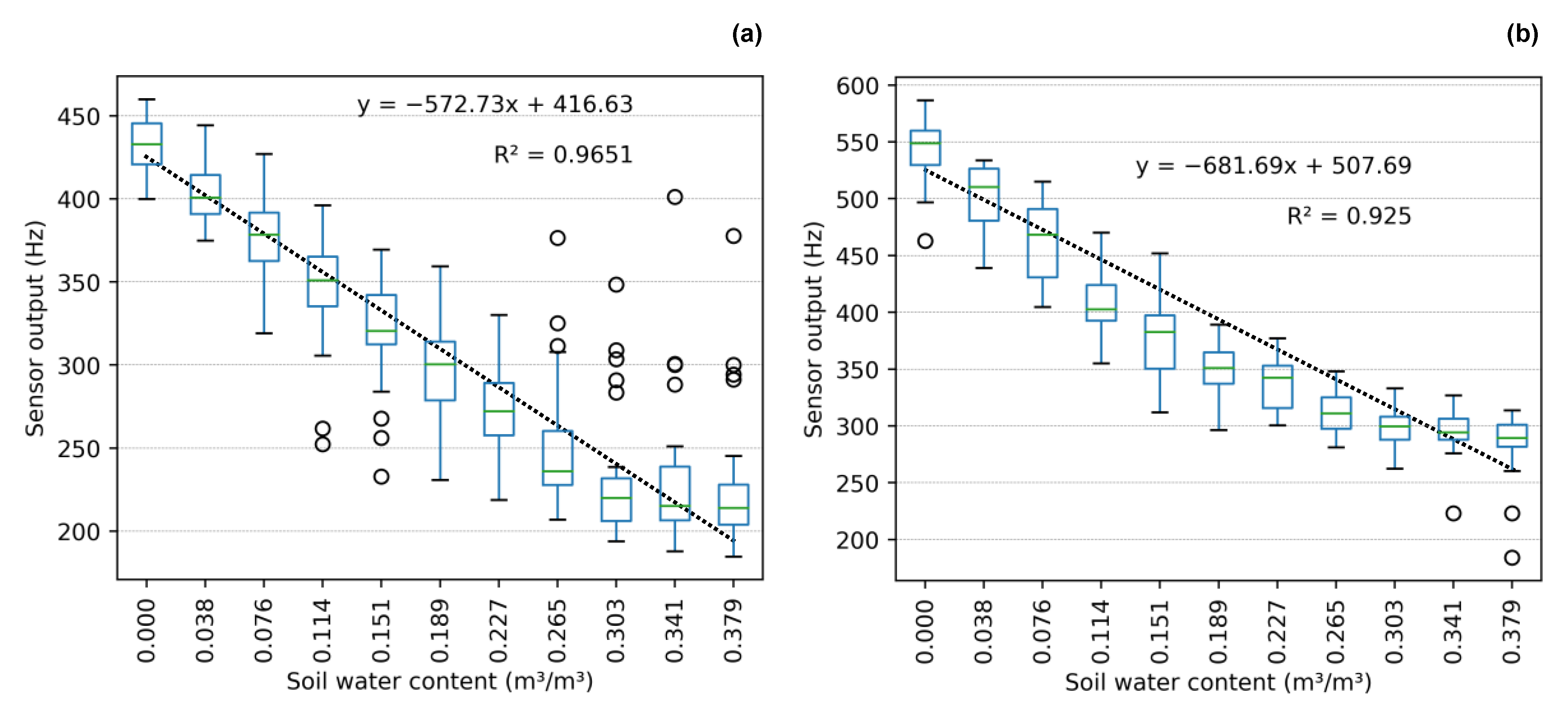
3.1. Laboratory Tests: Soil Moisture, Temperature, and Voltage
3.2. Soil Column Tests
3.3. Field Tests
4. Discussion
4.1. Sensor Performance
4.2. Low-Cost Technologies Applied to Water Resources Monitoring: Possibilities and Challenges
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture—Climate interactions in a changing climate: A review. Earth-Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Adla, S.; Rai, N.K.; Karumanchi, S.H.; Tripathi, S.; Disse, M.; Pande, S. Laboratory Calibration and Performance Evaluation of Low-Cost Capacitive and Very Low-Cost Resistive Soil Moisture Sensors. Sensors 2020, 20, 363. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nuha, M.S.; Rizqi, F.A.; Muzdrikah, F.S.; Nuha, M.S.; Rizqi, F.A. Calibration of Capacitive Soil Moisture Sensor (SKU:SEN0193). In Proceedings of the 4th International Conference on Science and Technology (ICST), Yogyakarta, Indonesia, 7–8 August 2018; pp. 1–6. [Google Scholar]
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil Moisture Measurement for Ecological and Hydrological Watershed-Scale Observatories: A Review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef] [Green Version]
- de Almeida, W.S.; Panachuki, E.; de Oliveira, P.T.S.; Menezes, R.D.S.; Sobrinho, T.A.; de Carvalho, D.F. Effect of soil tillage and vegetal cover on soil water infiltration. Soil Tillage Res. 2018, 175, 130–138. [Google Scholar] [CrossRef]
- Placidi, P.; Gasperini, L.; Grassi, A.; Cecconi, M.; Scorzoni, A. Characterization of Low-Cost Capacitive Soil Moisture Sensors for IoT Networks. Sensors 2020, 20, 3585. [Google Scholar] [CrossRef]
- Kargas, G.; Soulis, K. Performance Analysis and Calibration of a New Low-Cost Capacitance Soil Moisture Sensor. J. Irrig. Drain. Eng. 2012, 138, 632–641. [Google Scholar] [CrossRef]
- Mohanty, B.P.; Cosh, M.H.; Lakshmi, V.; Montzka, C. Soil Moisture Remote Sensing: State-of-the-Science. Vadose Zone J. 2017, 16, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Payero, J.O.; Mirzakhani-Nafchi, A.; Khalilian, A.; Qiao, X.; Davis, R. Development of a Low-Cost Internet-of-Things (IoT) System for Monitoring Soil Water Potential Using Watermark 200SS Sensors. Adv. Internet Things 2017, 7, 71–86. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.H.; Jeong, J.; Choi, M. Extension of cosmic-ray neutron probe measurement depth for improving field scale root-zone soil moisture estimation by coupling with representative in-situ sensors. J. Hydrol. 2019, 571, 679–696. [Google Scholar] [CrossRef]
- Yan, G.; Bore, T.; Schlaeger, S.; Scheuermann, A.; Li, L. Investigating scale effects in soil water retention curve via spatial time domain reflectometry. J. Hydrol. 2022, 612. [Google Scholar] [CrossRef]
- Kafarski, M.; Majcher, J.; Wilczek, A.; Szyplowska, A.; Lewandowski, A.; Zackiewicz, A.; Skierucha, W. Penetration Depth of a Soil Moisture Profile Probe Working in Time-Domain Transmission Mode. Sensors 2019, 19, 5485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pramanik, M.; Khanna, M.; Singh, M.; Singh, D.; Sudhishri, S.; Bhatia, A.; Ranjan, R. Automation of soil moisture sensor-based basin irrigation system. Smart Agric. Technol. 2022, 2. [Google Scholar] [CrossRef]
- Rakesh, N.; Ahmed, A.; Joseph, J.; Aouti, R.S.; Mogra, M.; Kushwaha, A.; Ashwin, R.; Rao, S.M.; Ananthasuresh, G. Analysis of heat paths in dual-probe-heat-pulse soil-moisture sensors for improved performance. Sens. Actuators A Phys. 2020, 318, 112520. [Google Scholar] [CrossRef]
- Leone, M. Advances in fiber optic sensors for soil moisture monitoring: A review. Results Opt. 2022, 7, 100213. [Google Scholar] [CrossRef]
- Tarantino, A.; Ridley, A.M.; Toll, D. Field Measurement of Suction, Water Content, and Water Permeability. Geotech. Geol. Eng. 2008, 26, 751–782. [Google Scholar] [CrossRef]
- Susha Lekshmi, S.U.; Singh, D.N.; Baghini, M.S. A critical review of soil moisture measurement. Measurement 2014, 54, 92–105. [Google Scholar] [CrossRef]
- Yu, L.; Gao, W.; Shamshiri, R.R.; Tao, S.; Ren, Y.; Zhang, Y.; Su, G. Review of research progress on soil moisture sensor technology. Int. J. Agric. Biol. Eng. 2021, 14, 32–42. [Google Scholar] [CrossRef]
- Jiménez, A.D.L.C.; de Almeida, C.D.G.C.; Junior, J.A.S.; dos Santos, C.S. Calibración de dos sensores capacitivos de humedad en un Ultisol. Dyna 2020, 87, 75–79. [Google Scholar] [CrossRef]
- Chu, M.; Patton, A.; Roering, J.; Siebert, C.; Selker, J.; Walter, C.; Udell, C. SitkaNet: A low-cost, distributed sensor network for landslide monitoring and study. Hardwarex 2021, 9. [Google Scholar] [CrossRef]
- López, E.; Vionnet, C.; Ferrer-Cid, P.; Barcelo-Ordinas, J.M.; Garcia-Vidal, J.; Contini, G.; Prodolliet, J.; Maiztegui, J. A Low-Power IoT Device for Measuring Water Table Levels and Soil Moisture to Ease Increased Crop Yields. Sensors 2022, 22, 6840. [Google Scholar] [CrossRef]
- Nagahage, E.A.A.D.; Nagahage, I.S.P.; Fujino, T. Calibration and Validation of a Low-Cost Capacitive Moisture Sensor to Integrate the Automated Soil Moisture Monitoring System. Agriculture 2019, 9, 141. [Google Scholar] [CrossRef] [Green Version]
- Barapatre, P.; Patel, J.N. Determination of Soil Moisture Using Various Sensors for Irrigation Water Management. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 576–582. [Google Scholar]
- Kulmány, I.M.; Bede-Fazekas, Á.; Beslin, A.; Giczi, Z.; Milics, G.; Kovács, B.; Kovács, M.; Ambrus, B.; Bede, L.; Vona, V. Calibration of an Arduino-based low-cost capacitive soil moisture sensor for smart agriculture. J. Hydrol. Hydromech. 2022, 70, 330–340. [Google Scholar] [CrossRef]
- Souza, G.; de Faria, B.T.; Gomes Alves, R.; Lima, F.; Aquino, P.T.; Soininen, J.-P. Calibration Equation and Field Test of a Capacitive Soil Moisture Sensor. In Proceedings of the IEEE International Workshop on Metrology for Agriculture and Forestry, (MetroAgriFor), Trento, Italy, 4–6 November 2020; pp. 180–184. [Google Scholar]
- Claessen, M.E.C.; de Oliveira Barreto, W.; de Paula, J.L.; Duarte, M.N. Manual de Métodos de Análise de Solos; Empresa Brasileira de Pesquisa Agropecuária—Centro Nacional de Pesquisa de Solos: Rio de Janeiro, Brasil, 1997. [Google Scholar]
- The HYDRUS-1D Software Package for Simulating the One-Dimensional Movement of Water, Heat, and Multiple Solutes in Variably-Saturated Media; Version 4; Department of Environmental Sciences University of California Riverside: Riverside, CA, USA, 2013.
- Richards, L.A. Capillary conduction of liquids through porous mediums. Physics 1931, 1, 318–333. [Google Scholar] [CrossRef]
- van Genuchten, M.T. A Closed-form Equation for Predicting the Hydraulic Conductivity of Unsaturated Soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- Šimůnek, J.; van Genuchten, M.T.; Šejna, M. Development and Applications of the HYDRUS and STANMOD Software Packages and Related Codes. Vadose Zone J. 2008, 7, 587–600. [Google Scholar] [CrossRef] [Green Version]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 1976, 12, 513–522. [Google Scholar] [CrossRef] [Green Version]
- Schaap, M.G.; Leij, F.J.; van Genuchten, M.T. rosetta: A computer program for estimating soil hydraulic parameters with hierarchical pedotransfer functions. J. Hydrol. 2001, 251, 163–176. [Google Scholar] [CrossRef]
- Oliveira, P.T.S.; Wendland, E.; Nearing, M.A.; Scott, R.L.; Rosolem, R.; da Rocha, H.R. The water balance components of undisturbed tropical woodlands in the Brazilian cerrado. Hydrol. Earth Syst. Sci. 2015, 19, 2899–2910. [Google Scholar] [CrossRef] [Green Version]
- Youlton, C.; Bragion, A.P.; Wendland, E. Experimental evaluation of sediment yield in the first year after replacement of pastures by sugarcane. Cienc. E Investig. Agrar. Rev. Latinoam. De Cienc. De La Agric. 2016, 43, 4. [Google Scholar] [CrossRef] [Green Version]
- Youlton, C.; Wendland, E.; Anache, J.A.A.; Poblete-Echeverría, C.; Dabney, S. Changes in Erosion and Runoff due to Replacement of Pasture Land with Sugarcane Crops. Sustainability 2016, 8, 685. [Google Scholar] [CrossRef] [Green Version]
- Anache, J.A.; Flanagan, D.C.; Srivastava, A.; Wendland, E.C. Land use and climate change impacts on runoff and soil erosion at the hillslope scale in the Brazilian Cerrado. Sci. Total. Environ. 2018, 622, 140–151. [Google Scholar] [CrossRef] [PubMed]
- Anache, J.A.A.; Wendland, E.; Rosalem, L.M.P.; Youlton, C.; Oliveira, P.T.S. Hydrological trade-offs due to different land covers and land uses in the Brazilian Cerrado. Hydrol. Earth Syst. Sci. 2019, 23, 1263–1279. [Google Scholar] [CrossRef] [Green Version]
- Cabrera, M.C.M.; Anache, J.A.A.; Wendland, E.; Youlton, C. Performance of evaporation estimation methods compared with standard 20 m2 tank. Rev. Bras. De Eng. Agrícola E Ambient. 2016, 20, 874–879. [Google Scholar] [CrossRef] [Green Version]
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; Moraes, G.J.L.; Sparovek, G. Köppen’s climate classification map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, A.N.A.; Schwamback, D. Lowcost Tech-Wetting Front (v1.0.2). Available online: https://zenodo.org/record/7463583#.Y_XK13ZByqE (accessed on 2 January 2023).
- Blöschl, G.; Bierkens, M.F.; Chambel, A.; Cudennec, C.; Destouni, G.; Fiori, A.; Kirchner, J.W.; McDonnell, J.J.; Savenije, H.H.; Sivapalan, M.; et al. Twenty-three unsolved problems in hydrology (UPH)—A community perspective. Hydrol. Sci. J. 2019, 64, 1141–1158. [Google Scholar] [CrossRef] [Green Version]
- Pereira, R.M.; Sandri, D.; Júnior, J.J.D.S. Evaluation of low-cost capacitive moisture sensors in three types of soils in the Cerrado, Brazil. Eng. Na Agric. 2022, 30, 262–272. [Google Scholar] [CrossRef]
- Borah, S.; Kumar, R.; Mukherjee, S. Low-cost IoT framework for irrigation monitoring and control. Int. J. Intell. Unmanned Syst. 2020, 9, 63–79. [Google Scholar] [CrossRef]
- Deng, X.; Yang, L.; Fu, Z.; Du, C.; Lyu, H.; Cui, L.; Zhang, L.; Zhang, J.; Jia, B. A calibration-free capacitive moisture detection method for multiple soil environments. Measurement 2020, 173, 108599. [Google Scholar] [CrossRef]
- Maya, P.; Calvo, B.; Sanz-Pascual, M.T.; Osorio, J. Low Cost Autonomous Lock-In Amplifier for Resistance/Capacitance Sensor Measurements. Electronics 2019, 8, 1413. [Google Scholar] [CrossRef] [Green Version]
- Surya, S.G.; Yuvaraja, S.; Varrla, E.; Baghini, M.S.; Palaparthy, V.S.; Salama, K.N. An in-field integrated capacitive sensor for rapid detection and quantification of soil moisture. Sens. Actuators B Chem. 2020, 321, 128542. [Google Scholar] [CrossRef]
- Wilson, T.B.; Kochendorfer, J.; Diamond, H.J.; Meyers, T.P.; Hall, M.; French, B.; Myles, L.; Saylor, R.D. A field evaluation of the SoilVUE10 soil moisture sensor. Vadose Zone J. 2023. [Google Scholar] [CrossRef]
- Wang, S.; Fu, Z.; Chen, H.; Nie, Y.; Xu, Q. Mechanisms of surface and subsurface runoff generation in subtropical soil-epikarst systems: Implications of rainfall simulation experiments on karst slope. J. Hydrol. 2019, 580, 124370. [Google Scholar] [CrossRef]
- Sun, D.; Yang, H.; Guan, D.; Yang, M.; Wu, J.; Yuan, F.; Jin, C.; Wang, A.; Zhang, Y. The effects of land use change on soil infiltration capacity in China: A meta-analysis. Sci. Total. Environ. 2018, 626, 1394–1401. [Google Scholar] [CrossRef] [PubMed]
- Okasha, A.; Ibrahim, H.; Elmetwalli, A.; Khedher, K.; Yaseen, Z.; Elsayed, S. Designing Low-Cost Capacitive-Based Soil Moisture Sensor and Smart Monitoring Unit Operated by Solar Cells for Greenhouse Irrigation Management. Sensors 2021, 21, 5387. [Google Scholar] [CrossRef] [PubMed]
- Lo, T.H.; Rudnick, D.R.; Singh, J.; Nakabuye, H.N.; Katimbo, A.; Heeren, D.M.; Ge, Y. Field assessment of interreplicate variability from eight electromagnetic soil moisture sensors. Agric. Water Manag. 2020, 231, 105984. [Google Scholar] [CrossRef] [Green Version]
- METER Group, Inc. 10HS Manual; Meter Group: Pullman, WA, USA, 2019. [Google Scholar]
- Sakaki, T.; Limsuwat, A.; Smits, K.M.; Illangasekare, T.H. Empirical two-point α-mixing model for calibrating the ECH2 O EC-5 soil moisture sensor in sands. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Kizito, F.; Campbell, C.S.; Cobos, D.R.; Teare, B.L.; Carter, B.; Hopmans, J.W. Frequency, electrical conductivity and temperature analysis of a low-cost capacitance soil moisture sensor. J. Hydrol. 2008, 352, 367–378. [Google Scholar] [CrossRef]
- Visconti, F.; de Paz, J.M.; Martínez, D.; Molina, M.J. Laboratory and field assessment of the capacitance sensors Decagon 10HS and 5TE for estimating the water content of irrigated soils. Agric. Water Manag. 2014, 132, 111–119. [Google Scholar] [CrossRef]
- SoilVUE10 Complete Soil Profile: Product Manual; Campbell Scientific: Logan, UT, USA, 2022.
- Soil Moisture Measurement Catalogue; Delta-T Devices: Cambridge, UK, 2022.
- TRIME-PICO 64/32: User Manual; IMKO Micromodultechnik: Ettlingen, Germany, 2017.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth (cm) | Texture (Weight %) | BD (g cm−3) | PD (g cm−3) | OM (g dm−3) | CEC | ||
|---|---|---|---|---|---|---|---|
| Clay | Silt | Sand | |||||
| 0−14 | 12 | 3 | 85 | 1.43 | 2.64 | 23 | 36 |
| 30 | 12 | 6 | 81 | 1.49 | 2.64 | 10 | 24 |
| 60 | 10 | 5 | 85 | 1.59 | 2.65 | 19 | 28 |
| 90 | 15 | 1 | 84 | 1.52 | 2.65 | 8 | 20 |
| Parameters | Values/Condition |
|---|---|
| Geometry information | |
| Depth (cm) | 100 |
| Mesh size (cm) | 1 |
| Number of layers | 1 |
| Time information | |
| Simulation time (h) | 16 |
| Time step | 1 h |
| Hydraulics properties | |
| Sand (%) | 81 |
| Silt (%) | 6 |
| Clay (%) | 12 |
| Bulk density (g cm−3) | 1.43 |
| (cm3 cm−3) | 0.0524 |
| (cm3 cm−3) | 0.376 |
| (cm−1) | 0.0362 |
| (-) | 1.438 |
| (cm d−1) | 10.768 |
| 0.5 | |
| Boundary conditions | |
| Upper boundary condition | Atmospheric BC with surface layer |
| Lower boundary condition | Free drainage |
| Variable boundary conditions | 9.88 mm/h |
| Material | Quantity | Cost per Unit |
|---|---|---|
| Capacitive soil moisture sensor SKU:SEN0193 v1.2 | 4 units | BRL 28.90/USD 5.4 |
| Jumpers (male and female) | 20 units | BRL 2.79/USD 0.52 |
| Arduino Uno R3 | 1 unit | BRL 89.90/USD 16.80 |
| Relay shield 5V 4 channels | 1 unit | BRL 42.65/USD 7.97 |
| Datalogger shield | 1 unit | BRL 59.90/USD 11.20 |
| Memory card 8 gb | 1 unit | BRL 39.50/USD 7.38 |
| Step down LM2596S | 1 unit | BRL29.99/USD 5.61 |
| Battery 12v 7a | 1 unit | BRL 69.90/USD 13.07 |
| Solar panel 60 W | 1 unit | BRL 275.00/USD 51.40 |
| Charge controller 30a | 1 unit | BRL 62.00/USD 11.59 |
| Electrical box 170 × 120 × 90 mm | 4 unit | BRL 45.34/USD 8.47 |
| Electrical box 22 × 33 × 46 mm | 1 unit | BRL 4.30/USD 0.80 |
| Heat shrink tubing 18.00 mm2 | 15 cm | BRL 12.90/USD 2.41 |
| Silicone transparent | 1 tube | BRL 19.90/USD 3.72 |
| Total: BRL 869.67/USD 162.56 |
| Individual | Single Point | Universal | |
|---|---|---|---|
| R2 | 0.87–0.97 | 0.92 (group 1)–0.96 (group 2) | 0.95 |
| RMSE (cm3.cm−3) | 0.054–0.078 | 0.061 (group 1)–0.092 (group 2) | 0.082 |
| Sensor: Manufacturer | Cost | Accuracy | Qualified Labor Demand | Sampling Volume | Life Expectancy |
|---|---|---|---|---|---|
| CS650: Campbell Scientific |  |  |  |  |  |
| ECH2O 10HS: Decagon |  |  |  |  |  |
| ECH2O EC-5: Decagon |  |  |  |  |  |
| SM150T/ML3: Delta-T Devices |  |  |  |  |  |
| SoilVUE10: Campbell Scientific |  |  |  |  |  |
| TEROS-10: Edaphic scientific |  |  |  |  |  |
| TDR-315H: Acclima company |  |  |  |  |  |
| TRIME-PICO 64: Imko |  |  |  |  |  |
| SKU:SEN0193: DFRobot |  |  |  |  |  |
| Sensor: Manufacturer | Accuracy (RMSE) | Reference |
|---|---|---|
| CS655: Campbell Scientific | ±0.017 m3 m−3 | [51] |
| ECH2O 10HS: Decagon | ±0.031 m3 m−3 | [52] |
| ECH2O EC-5: Decagon | ±0.028 m3 m−3 | [53] |
| ECH2O EC-5: Decagon | ±0.017 m3 m−3 | [51] |
| ECH2O 5TE: Decagon | ±0.026 m3 m−3 | [54] |
| ECH2O 5TE: Decagon | ±0.05 m3 m−3 | [55] |
| SoilVUE10: Campbell Scientific | ±0.01 m3 m−3 | [56] |
| SM150T/ML3: Delta-T Devices | ±0.03 m3 m−3 | [57] |
| TDR-315H: Acclima company | ±0.013 m3 m−3 | [51] |
| TEROS-12: Edaphic scientific | ±0.015 m3 m−3 | [51] |
| TRIME-PICO 64: Imko | ±0.03 m3 m−3 | [58] |
| SKU:SEN0193: DFRobot | ±0.067 m3 m−3 | [24] |
| SKU:SEN0193: DFRobot | ±0.08 m3 m−3 | [42] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schwamback, D.; Persson, M.; Berndtsson, R.; Bertotto, L.E.; Kobayashi, A.N.A.; Wendland, E.C. Automated Low-Cost Soil Moisture Sensors: Trade-Off between Cost and Accuracy. Sensors 2023, 23, 2451. https://doi.org/10.3390/s23052451
Schwamback D, Persson M, Berndtsson R, Bertotto LE, Kobayashi ANA, Wendland EC. Automated Low-Cost Soil Moisture Sensors: Trade-Off between Cost and Accuracy. Sensors. 2023; 23(5):2451. https://doi.org/10.3390/s23052451
Chicago/Turabian StyleSchwamback, Dimaghi, Magnus Persson, Ronny Berndtsson, Luis Eduardo Bertotto, Alex Naoki Asato Kobayashi, and Edson Cezar Wendland. 2023. "Automated Low-Cost Soil Moisture Sensors: Trade-Off between Cost and Accuracy" Sensors 23, no. 5: 2451. https://doi.org/10.3390/s23052451