


Prioritization Based Task Offloading in UAV-Assisted Edge Networks †

Abstract
:1. Introduction
- Offloading management optimization model: We proposed a mathematical model to make centralized assignment/offloading decisions for the incoming task processing requests. Our model considers centralized assignment decisions for task offloading requests received from mobile ground user units. Offloading can be assigned to ground vehicles or a cloud processor service. The model’s objective function is to minimize average penalty scores caused by task completion time;
- Open-source contribution to Mininet-WiFi: The wmediumd application, a Wi-Fi delay and loss simulator and used by a Mininet-WiFi emulator [5], did not support independent mediums simultaneously, which meant that all packets experience scheduling collisions with one another. It had prevented us from performing multiple data transfers at the same time without suffering a significant loss in throughput. We have completed the development of a source-code contribution for both Mininet-WiFi and wmediumd to isolate networks automatically with a custom configuration option;
- Heuristics and quasi-optimal algorithm for task offloading: Three heuristic algorithms and a branch and bound style quasi-optimal task offloading algorithm are implemented. The latter works on the previously simulated data to obtain better insight for the evaluation of our heuristic algorithms with respect to near-optimal operation.
2. Related Work
2.1. UAV-Aided Vehicular Networks
2.2. Task Offloading in UAV Networks
2.3. Software-Defined UAV Networks
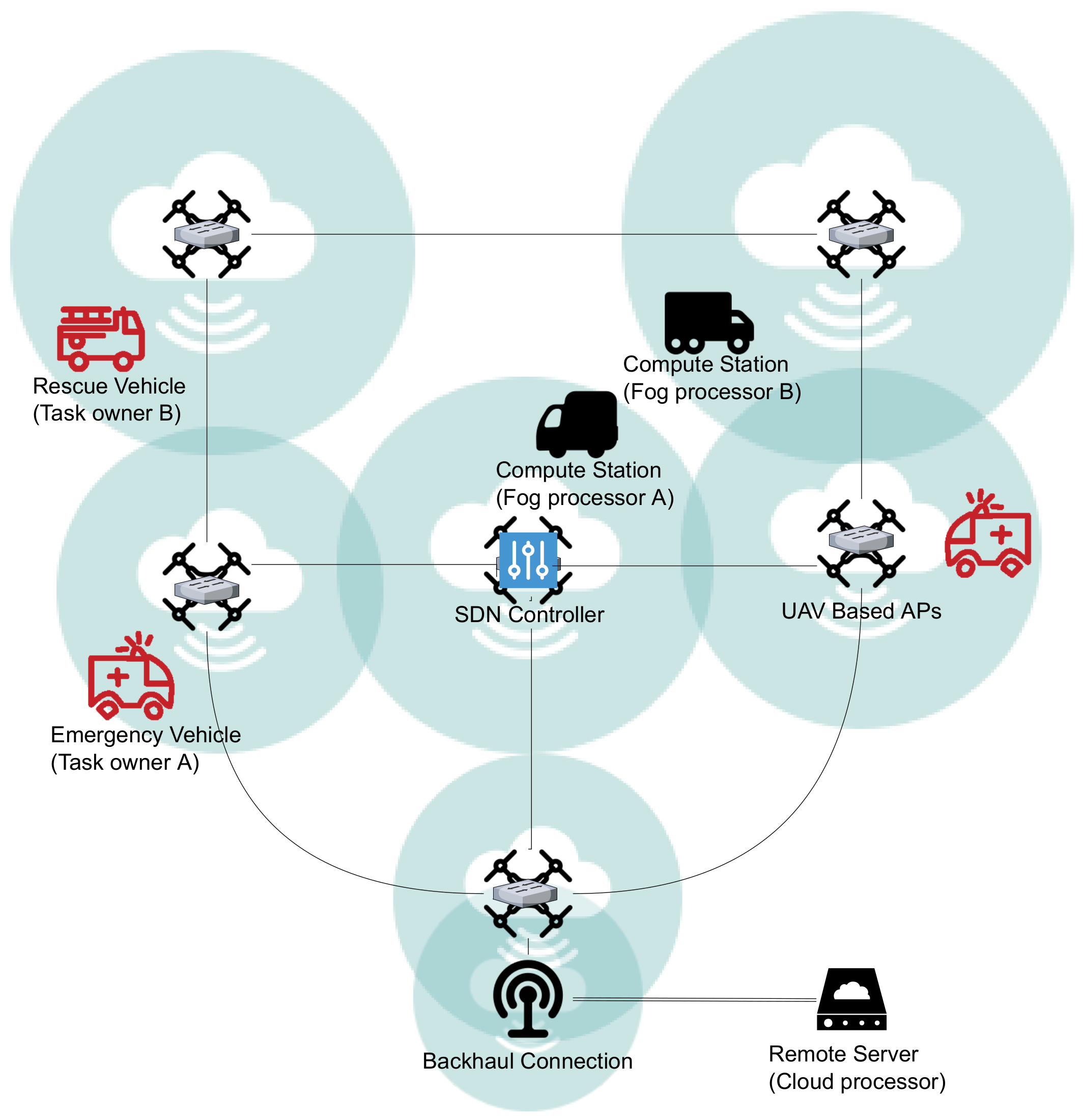
3. System Model
3.1. Channel Models
3.2. Mobility Model
4. Problem Formulation
5. Task Offloading Algorithms in Our Model
5.1. Aggressive Wait Offloading Algorithm (AGG-1)
| Algorithm 1: Aggressive-Wait Offloading Algorithm (AGG-1) |
 |
5.2. Aggressive Tx-Order Offloading Algorithm (AGG-2)
5.3. Adaptive Offloading Algorithm (ADP)
| Algorithm 2: Adaptive Offloading Algorithm (ADP) |
 |
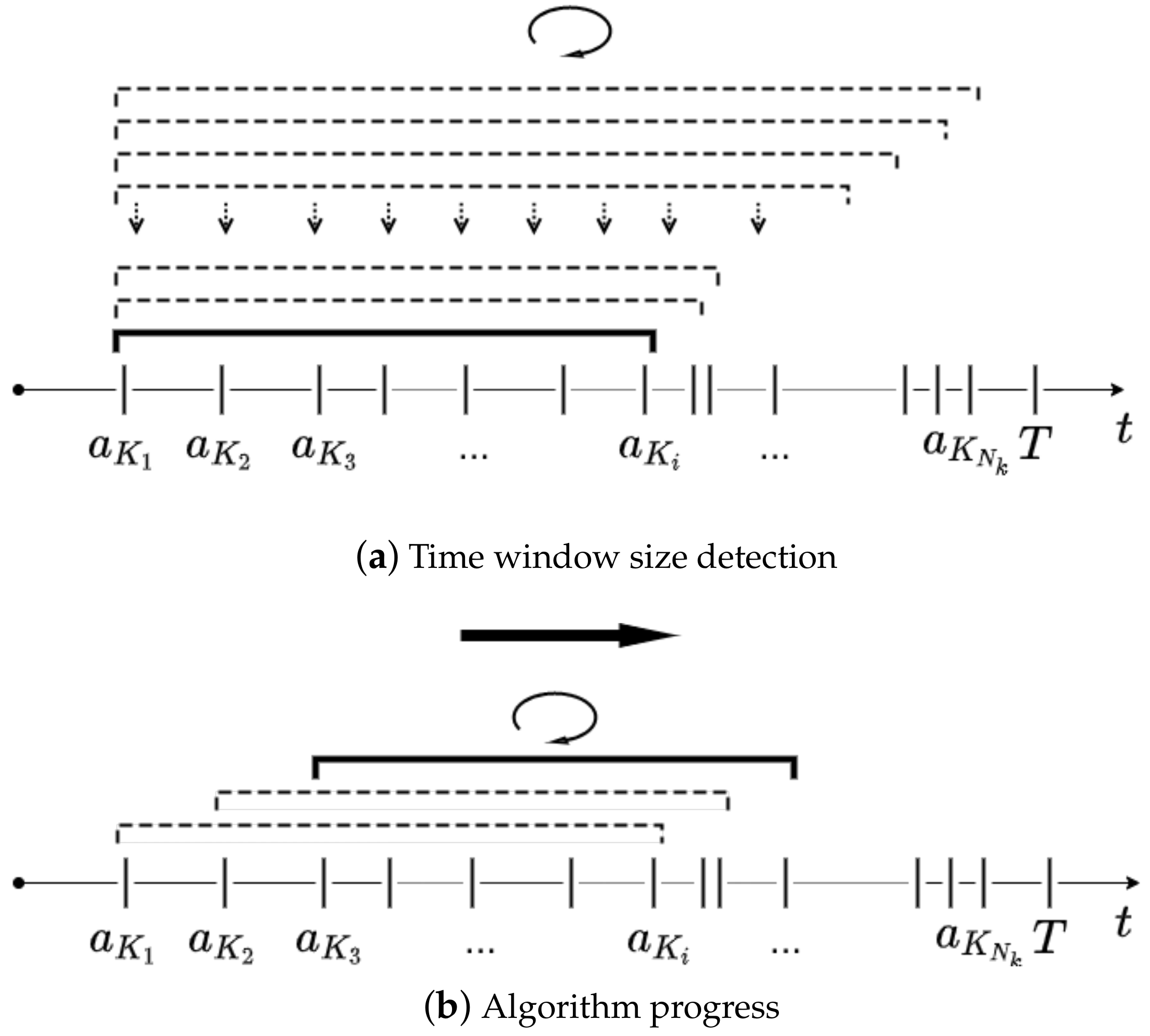
5.4. Quasi-Optimal Offloading Algorithm (Q-OPT)
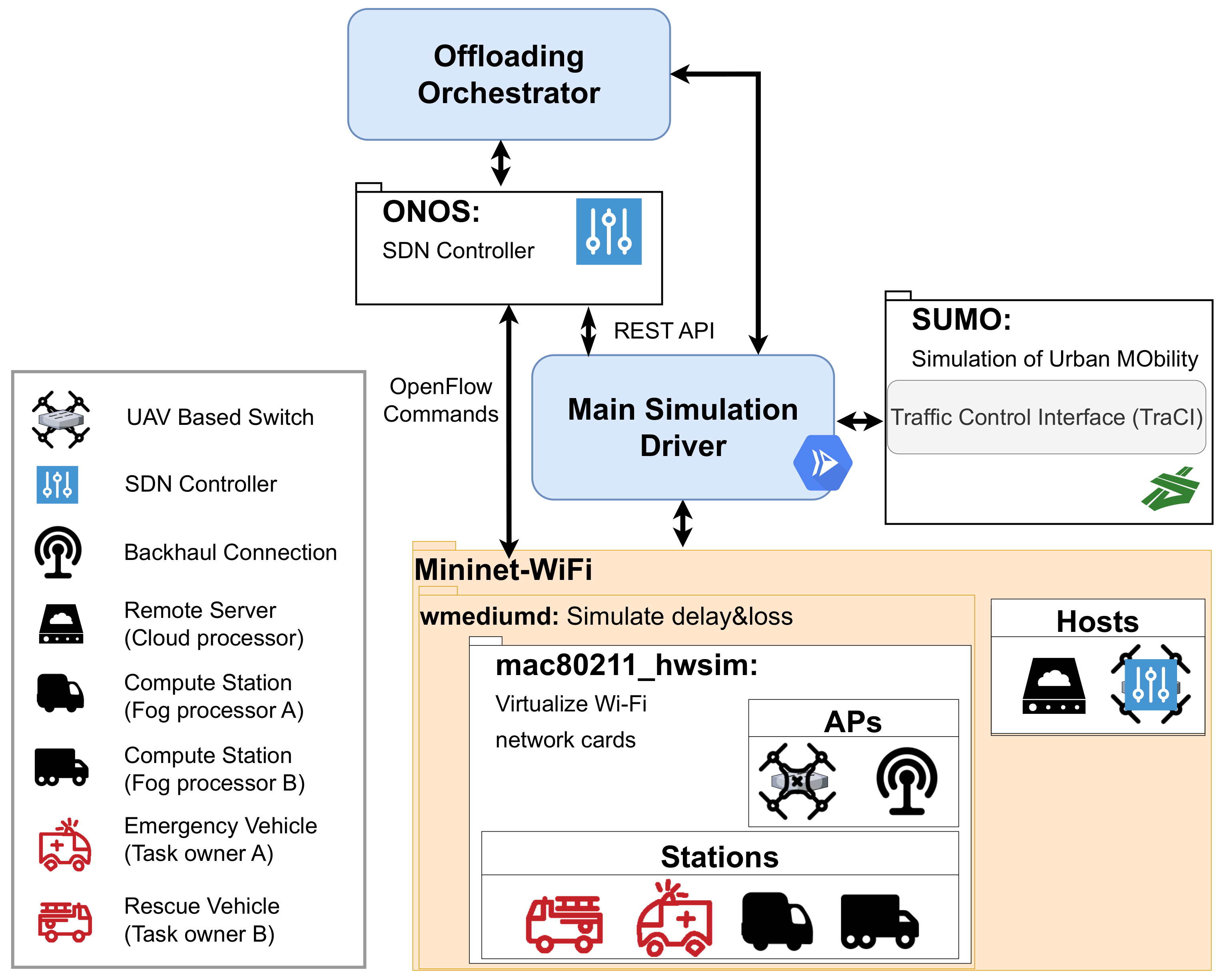
6. System Implementation
6.1. System Components
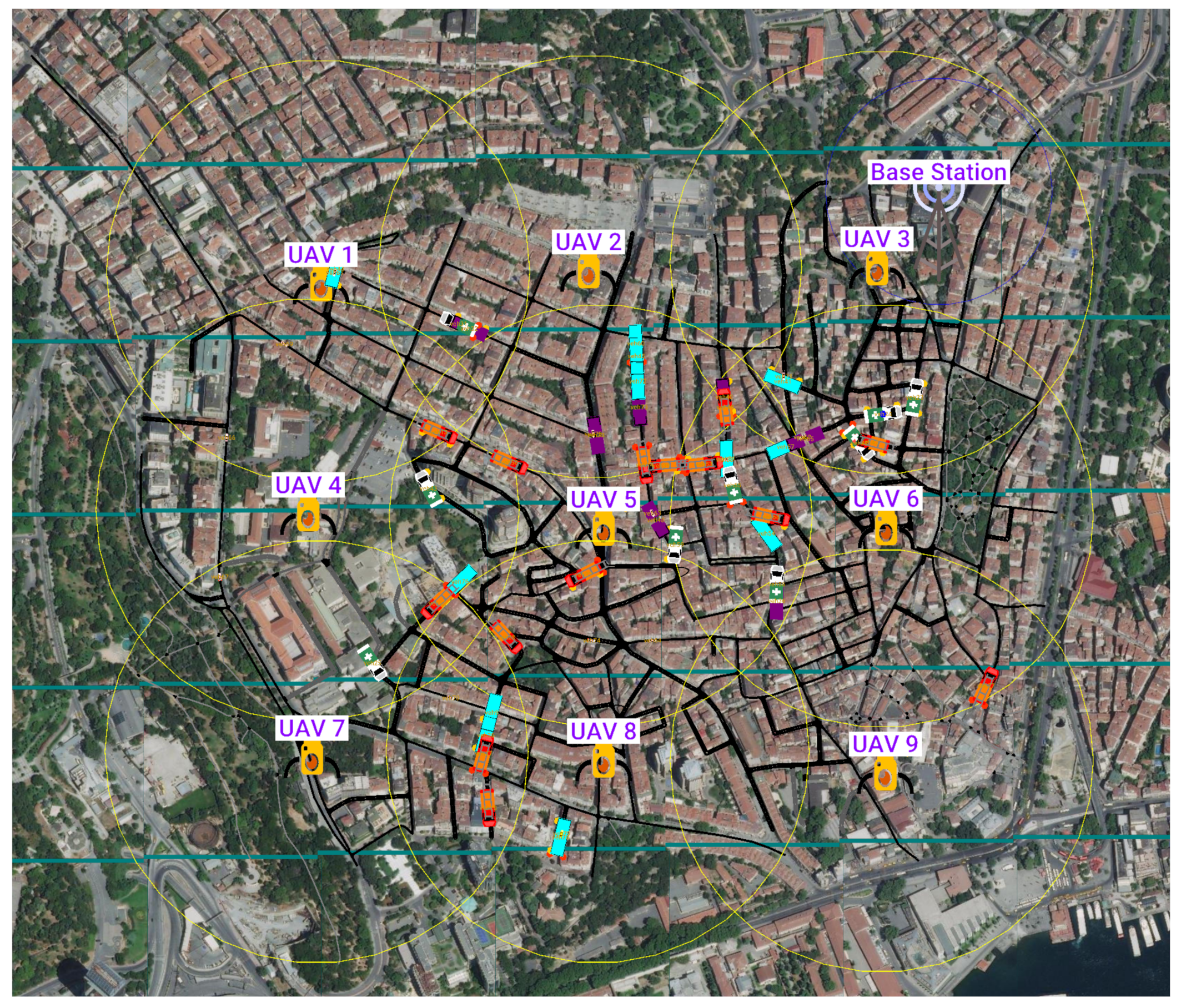
6.1.1. Vehicle Mobility Generation
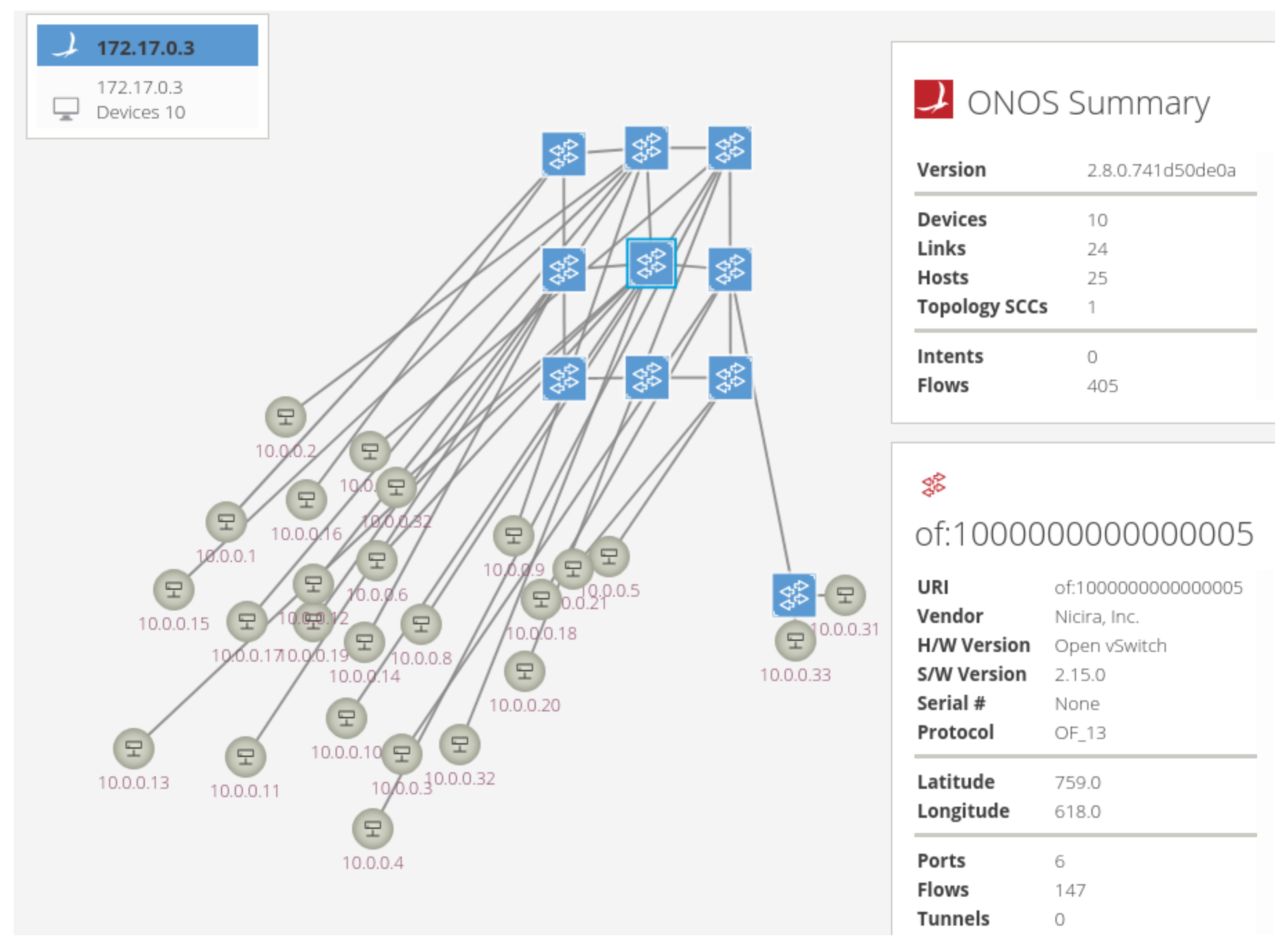
6.1.2. Network Infrastructure
6.1.3. Offloading Orchestrator
6.1.4. Main Simulation Driver
7. Performance Evaluation
7.1. Scenario 1—Task Inter-Arrival Time ()
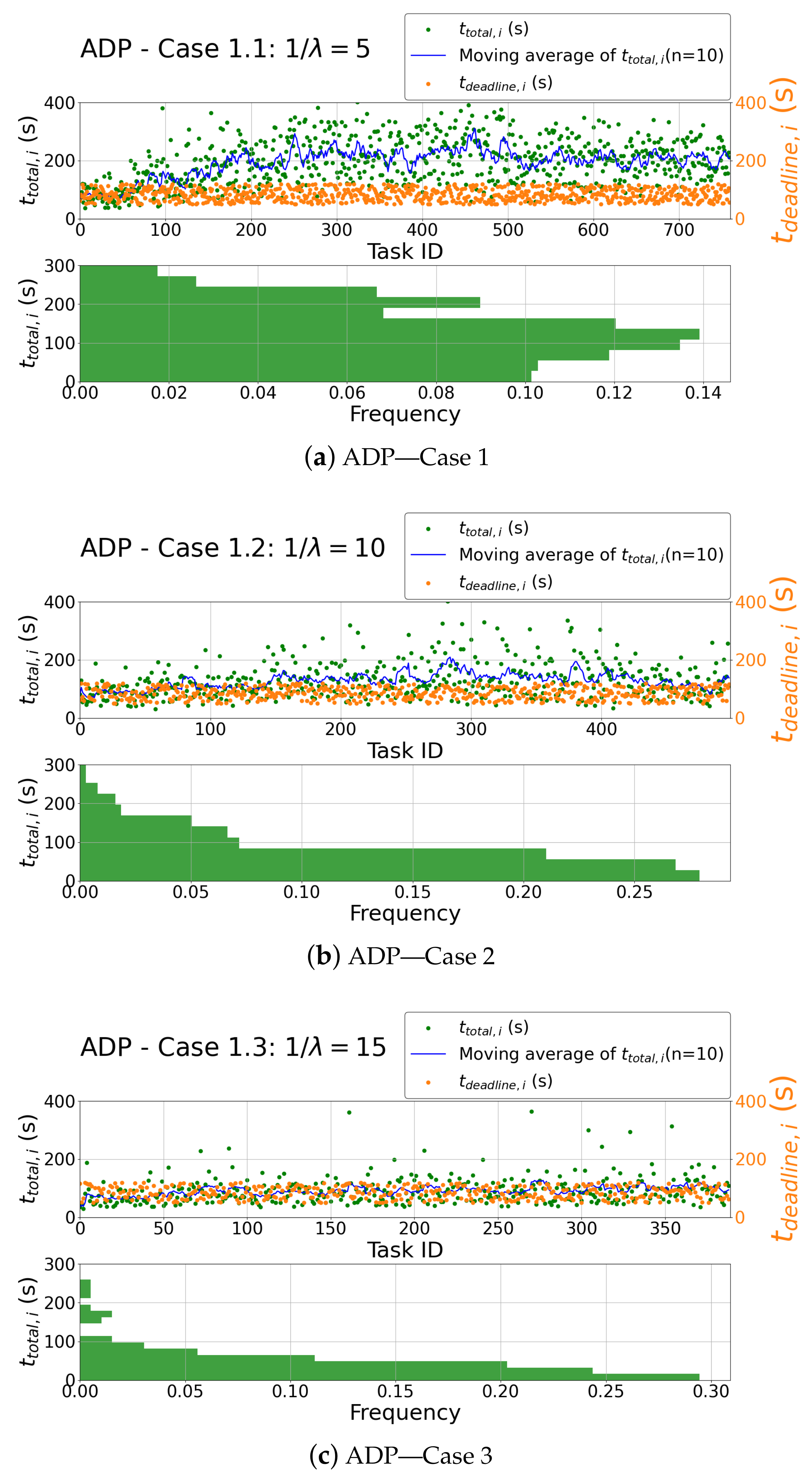
- Case 1.1: = 5 s;
- Case 1.2: = 10 s;
- Case 1.3: = 15 s.
7.2. Scenario 2—Average Vehicle Speed
- Case 2.1: = 5 km/h;
- Case 2.2: = 20 km/h;
- Case 2.3: = 40 km/h.
7.3. Experimental Results
7.3.1. Impact of Task Inter-Arrival Time
- i
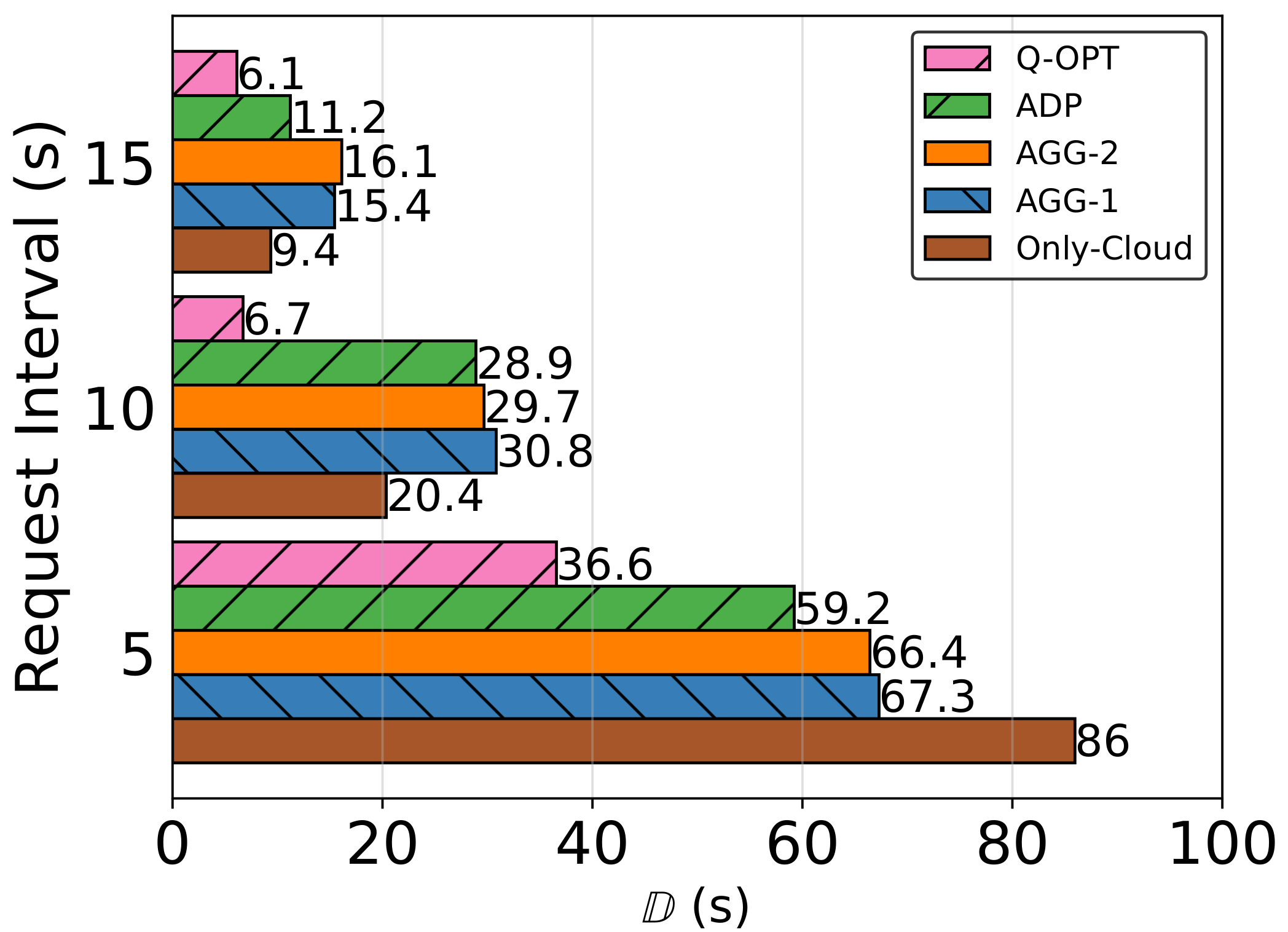
- Impact of Task Inter-Arrival Time on Penalty Results
- ii
- Impact of Task Inter-Arrival Time on Task Processing Characteristics
- iii
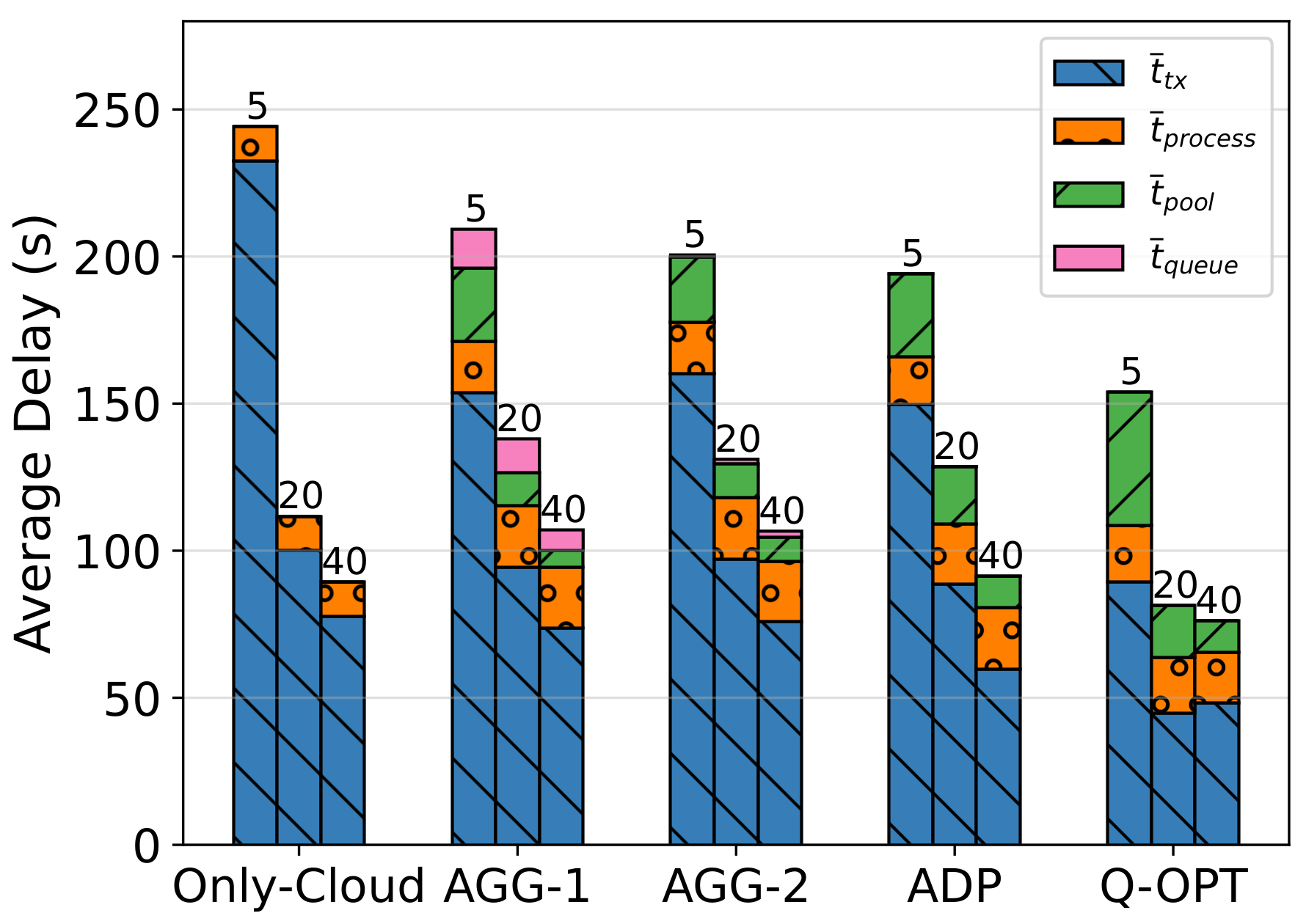
- Impact of Task Inter-Arrival Time on Temporal Results for Task Completion
7.3.2. Impact of Average Vehicle Speed ()
- i
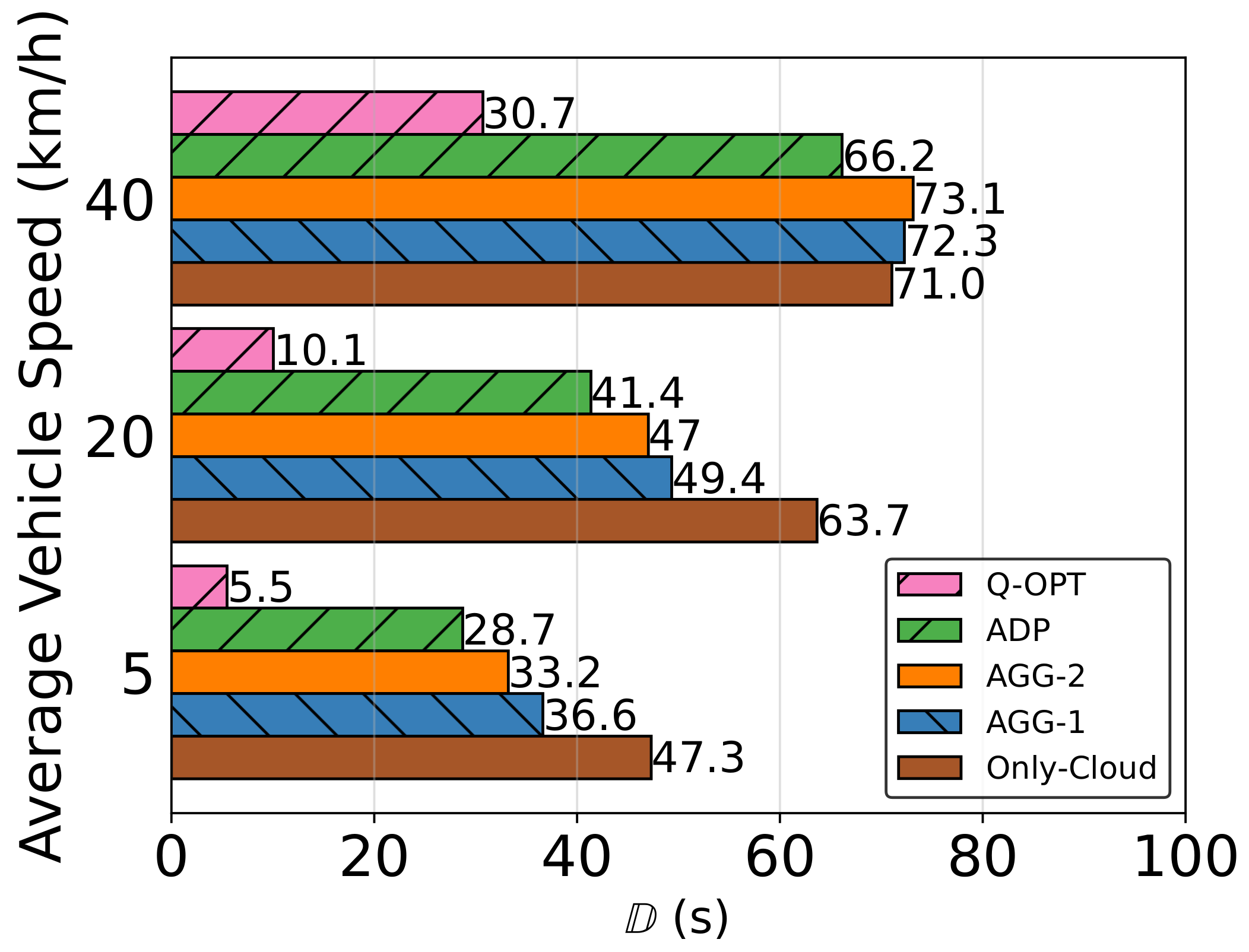
- Impact of Average Vehicle Speed on Penalty Results
- ii
- Impact of Average Vehicle Speed on Task Processing Characteristics
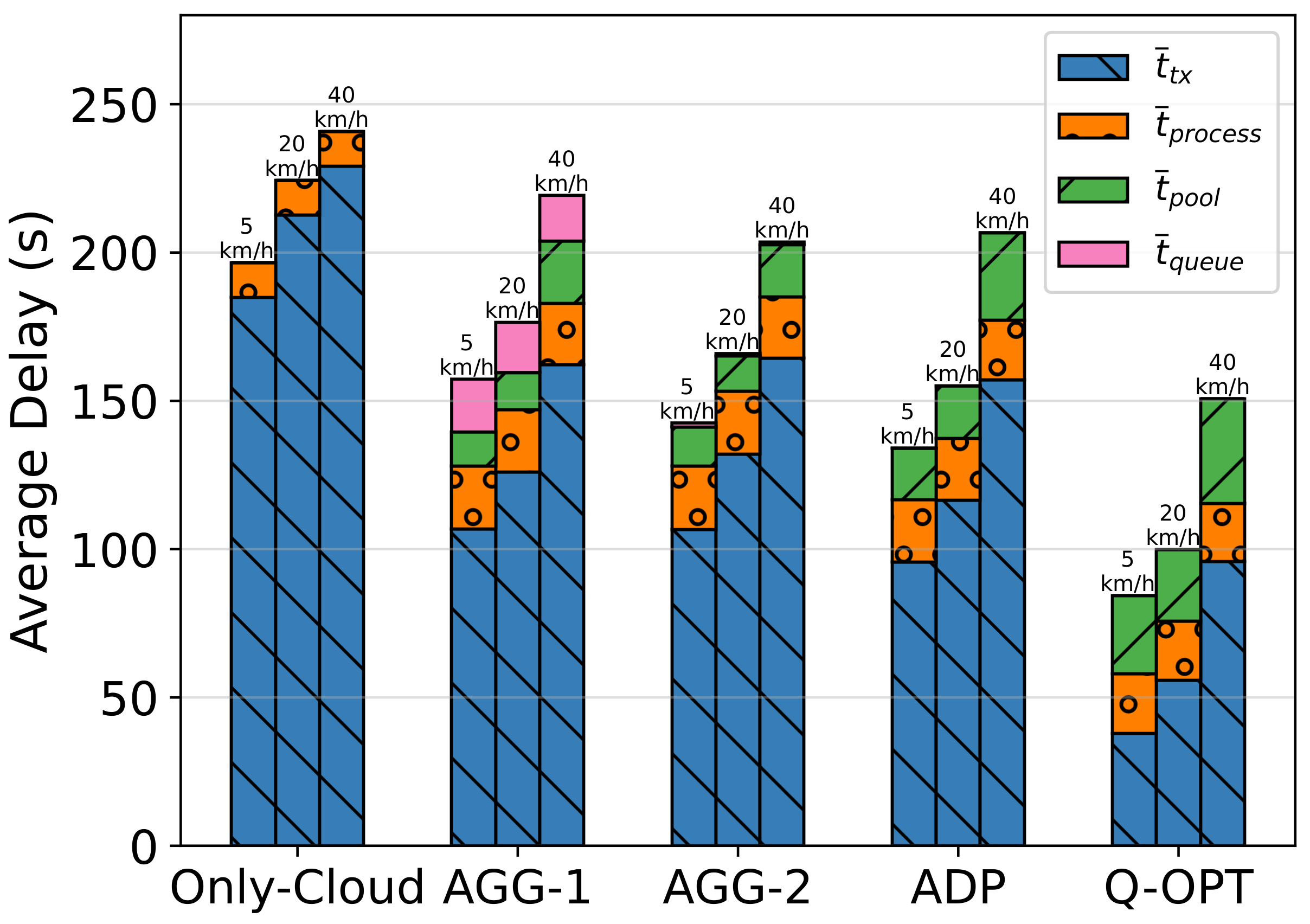
- iii
- Impact of Average Vehicle Speed on Temporal Results for Task Completion
7.4. Algorithm Analysis
7.5. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Channel Models

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| The additional LoS attenuation factors due to the LoS connections | |
| The additional NLoS attenuation factors due to the NLoS connections | |
| c | The speed of light traveling through a vacuum |
| f | The system carrier frequency |
| The distance between and at t | |
| The distance between and at t | |
| A2G channel parameters | |
| The probability of LoS connection between and at t | |
| The probability of NLoS connection between and at t | |
| The transmission gain of | |
| The receiver gain of | |
| The receiver gain of | |
| The average received power of from at t | |
| The average received power of from at t | |
| The link capacity between the owner of and at t | |
| The link capacity between the owner of and the cloud server at t | |
| The link capacity between and at time slot t | |
| The elevation angle at t | |
| A2A path loss exponent |
Appendix A.1. Air-to-Ground (A2G) Communication Channel Model
Appendix A.2. Air-to-Air (A2A) Communication Channel Model
References
- Porambage, P.; Gür, G.; Osorio, D.P.M.; Liyanage, M.; Gurtov, A.; Ylianttila, M. The Roadmap to 6G Security and Privacy. IEEE Open J. Commun. Soc. 2021, 2, 1094–1122. [Google Scholar] [CrossRef]
- Kalinagac, O.; Kafiloglu, S.S.; Alagoz, F.; Gur, G. Caching and D2D Sharing for Content Delivery in Software-Defined UAV Networks. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, H.; Li, J.; Xu, W.; Zhang, N.; Shen, X. Drone Assisted Vehicular Networks: Architecture, Challenges and Opportunities. IEEE Netw. 2018, 32, 130–137. [Google Scholar] [CrossRef]
- Selvi, H.; Gür, G.; Alagöz, F. Cooperative load balancing for hierarchical SDN controllers. In Proceedings of the 2016 IEEE 17th International Conference on High Performance Switching and Routing (HPSR), Yokohama, Japan, 14–17 June 2016; pp. 100–105. [Google Scholar] [CrossRef]
- Fontes, R.R.; Afzal, S.; Brito, S.H.B.; Santos, M.A.S.; Rothenberg, C.E. Mininet-WiFi: Emulating software-defined wireless networks. In Proceedings of the 2015 11th International Conference on Network and Service Management (CNSM), Barcelona, Spain, 9–13 November 2015; pp. 384–389. [Google Scholar] [CrossRef]
- Zheng, K.; Zheng, Q.; Chatzimisios, P.; Xiang, W.; Zhou, Y. Heterogeneous Vehicular Networking: A Survey on Architecture, Challenges, and Solutions. IEEE Commun. Surv. Tutor. 2015, 17, 2377–2396. [Google Scholar] [CrossRef]
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706. [Google Scholar] [CrossRef]
- Jia, S.; Zhang, L. Modelling unmanned aerial vehicles base station in ground-to-air cooperative networks. IET Commun. 2017, 11, 1187–1194. [Google Scholar] [CrossRef]
- Pourbaba, P.; Manosha, K.B.; Ali, S.; Rajatheva, N. Full-duplex UAV relay positioning for vehicular communications with underlay v2v links. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar] [CrossRef]
- Fan, X.; Huang, C.; Fu, B.; Wen, S.; Chen, X. UAV-Assisted Data Dissemination in Delay-Constrained VANETs. Mob. Inf. Syst. 2018, 2018, 8548301. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Zeng, F.; Cheng, X.; Yang, L. UAV-Aided Data Dissemination Protocol with Dynamic Trajectory Scheduling in VANETs. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Luan, T.H.; Su, Z.; Xu, Q.; Li, R.; Chen, N. Task Offloading for Post-Disaster Rescue in Unmanned Aerial Vehicles Networks. IEEE/ACM Trans. Netw. 2022, 30, 1525–1539. [Google Scholar] [CrossRef]
- Almutairi, J.; Aldossary, M.; Alharbi, H.A.; Yosuf, B.A.; Elmirghani, J.M.H. Delay-Optimal Task Offloading for UAV-Enabled Edge-Cloud Computing Systems. IEEE Access 2022, 10, 51575–51586. [Google Scholar] [CrossRef]
- Wang, J.; Feng, D.; Zhu, J.; Huang, H. Vehicular Computation Offloading in UAV-enabled MEC Systems. In Proceedings of the 2022 IEEE 25th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Hangzhou, China, 4–6 May 2022; pp. 1071–1076. [Google Scholar] [CrossRef]
- Huang, C.; Wang, H.; Zeng, L.; Li, T. Resource Scheduling and Energy Consumption Optimization Based on Lyapunov Optimization in Fog Computing. Sensors 2022, 22, 3527. [Google Scholar] [CrossRef]
- Alioua, A.; Djeghri, H.; Cherif, M.E.T.; Senouci, S.M.; Sedjelmaci, H. UAVs for traffic monitoring: A sequential game-based computation offloading/sharing approach. Comput. Netw. 2020, 177, 107273. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, K.; Tan, Z.; Li, X.; Sharma, S.; Liu, Z. A Novel Cost Optimization Strategy for SDN-Enabled UAV-Assisted Vehicular Computation Offloading. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3664–3674. [Google Scholar] [CrossRef]
- Feng, G.; Wang, C.; Li, B.; Lv, H.; Zhuang, X.; Lv, H.; Wang, H.; Hu, X. UAV-assisted wireless relay networks for mobile offloading and trajectory optimization. Peer -Peer Netw. Appl. 2019, 12, 1820–1834. [Google Scholar] [CrossRef]
- Kang, H.; Chang, X.; Mišić, J.; Mišić, V.B.; Fan, J.; Liu, Y. Cooperative UAV Resource Allocation and Task Offloading in Hierarchical Aerial Computing Systems: A MAPPO Based Approach. IEEE Internet Things J. 2023, 1. [Google Scholar] [CrossRef]
- Sacco, A.; Esposito, F.; Marchetto, G.; Montuschi, P. A Self-Learning Strategy for Task Offloading in UAV Networks. IEEE Trans. Veh. Technol. 2022, 71, 4301–4311. [Google Scholar] [CrossRef]
- Zaman, S.K.; Jehangiri, A.; Maqsood, T.; Shuja, J.; Ahmad, Z.; Umar, A. LiMPO: Lightweight mobility prediction and offloading framework using machine learning for mobile edge computing. Clust. Comput. 2022. [Google Scholar] [CrossRef]
- Secinti, G.; Darian, P.B.; Canberk, B.; Chowdhury, K.R. SDNs in the Sky: Robust End-to-End Connectivity for Aerial Vehicular Networks. IEEE Commun. Mag. 2018, 56, 16–21. [Google Scholar] [CrossRef]
- Misra, S.; Saha, N. Detour: Dynamic Task Offloading in Software-Defined Fog for IoT Applications. IEEE J. Sel. Areas Commun. 2019, 37, 1159–1166. [Google Scholar] [CrossRef]
- Al-Turjman, F.; Abujubbeh, M.; Malekloo, A.; Mostarda, L. UAVs assessment in software-defined IoT networks: An overview. Comput. Commun. 2020, 150, 519–536. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Zhao, H. An SDN framework for UAV backbone network towards knowledge centric networking. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 456–461. [Google Scholar] [CrossRef]
- Alioua, A.; Senouci, S.M.; Moussaoui, S.; Sedjelmaci, H.; Messous, M.A. Efficient Data Processing in Software-Defined UAV-Assisted Vehicular Networks: A Sequential Game Approach. Wirel. Pers. Commun. 2018, 101, 2255–2286. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, S.; Liu, X.; Tong, H.; Yin, C. Joint Task and Resource Allocation in SDN-based UAV-assisted Cellular Networks. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China, ICCC 2020, Chongqing, China, 9–11 August 2020; pp. 430–435. [Google Scholar] [CrossRef]
- Liu, C.; Ding, M.; Ma, C.; Li, Q.; Lin, Z.; Liang, Y.C. Performance Analysis for Practical Unmanned Aerial Vehicle Networks with LoS/NLoS Transmissions. In Proceedings of the 2018 IEEE International Conference on Communications Workshops, ICC Workshops 2018—Proceedings, Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP Altitude for Maximum Coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular UAV-To-X Communications: Design and Optimization for Multi-UAV Networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar] [CrossRef] [Green Version]
- Bouachir, O.; Abrassart, A.; Garcia, F.; Larrieu, N. A Mobility Model For UAV Ad hoc Network. In Proceedings of the ICUAS 2014, International Conference on Unmanned Aircraft Systems, Orlando, FL, USA, 27–30 May 2014; pp. 383–388. [Google Scholar]
- Chen, W.; Wang, D.; Li, K. Multi-User Multi-Task Computation Offloading in Green Mobile Edge Cloud Computing. IEEE Trans. Serv. Comput. 2019, 12, 726–738. [Google Scholar] [CrossRef]
- Berde, P.; Gerola, M.; Hart, J.; Higuchi, Y.; Kobayashi, M.; Koide, T.; Lantz, B.; O’Connor, B.; Radoslavov, P.; Snow, W.; et al. ONOS: Towards an Open, Distributed SDN OS. In Proceedings of the Third Workshop on Hot Topics in Software Defined Networking, Chicago, IL, USA, 22 August 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Pfaff, B.; Pettit, J.; Koponen, T.; Jackson, E.J.; Zhou, A.; Rajahalme, J.; Gross, J.; Wang, A.; Stringer, J.; Shelar, P.; et al. The Design and Implementation of Open vSwitch. In Proceedings of the NSDI, Oakland, CA, USA, 4–6 May 2015. [Google Scholar]
- NLANR (National Laboratory for Applied Network Research)/DAST. iPerf Tool. 2019. Available online: https://iperf.fr/ (accessed on 19 December 2022).
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Lantz, B.; Heller, B.; McKeown, N. A Network in a Laptop: Rapid Prototyping for Software-Defined Networks. In Proceedings of the 9th ACM SIGCOMM Workshop on Hot Topics in Networks, Monterey, CA, USA, 20–21 October 2010; Association for Computing Machinery: New York, NY, USA, 2010. [Google Scholar] [CrossRef]
- Consortium, I.E. Broadband Wireless and WiMAX; Comprehensive Report; International Engineering Consortium: Chicago, IL, USA, 2005. [Google Scholar]
- Moreira, M.J.M. Yawmd: Multiple Medium Support and Performance Improvements for Wmediumd. Master’s Thesis, University of Porto, Porto, Portugal, 2020. [Google Scholar]
- Carrano, R.C.; Magalhães, C.S.; Saade, D.C.M.; Albuquerque, C.V.N. IEEE 802.11s Multihop MAC: A Tutorial. IEEE Commun. Surv. Tutor. 2011, 13, 52–67. [Google Scholar] [CrossRef]











| Symbol | Definition |
|---|---|
| The UAV | |
| The vehicle | |
| The task | |
| If is the owner of , 1; otherwise, 0 | |
| The priority of | |
| The penalty point of | |
| The weighted penalty point of | |
| If is completed, 1; otherwise, 0 | |
| The probability of the task offloaded to the cloud if the pool is heavily occupied | |
| The probability of the task offloaded to the cloud if the pool is moderately occupied | |
| The probability of the task offloaded to the cloud if the pool is lightly occupied | |
| The size of | |
| The processor | |
| The processing speed of | |
| The processing speed of cloud | |
| The queue size of | |
| The queue of | |
| The number of UAVs | |
| The number of tasks | |
| The number of processors | |
| z | The extra penalty point if the task deadline is missed |
| Symbol | Definition |
|---|---|
| T | The number of time slots |
| The time elapsed to complete | |
| The time elapsed to be assigned for | |
| The time elapsed to transmit | |
| The time elapsed on processor queue for | |
| The time elapsed to process | |
| The time budget for to be processed without any QoS violation, i.e., penalty | |
| The arrival time slot of | |
| The departure time slot of | |
| The arrival time slot of | |
| The completion time slot of |
| Symbol | Definition |
|---|---|
| if is assigned to | |
| The maximum number of candidate solutions that the algorithm will attempt to solve within a time-window | |
| Event for system event received | |
| Controller task pool | |
| Task to be assigned | |
| Penalty point list |
| Symbol | Value | Definition |
| 0.1 s | Exponentially distributed task generation rate | |
| 9 | Number of UAVs | |
| Task size | 30–40 MB | Randomly distributed |
| 20 km/h | Average Vehicle Speed | |
| 3 MB/s | The processing speed of cloud | |
| 50–120 s | The time budget for to be processed without any QoS violation (randomly distributed) | |
| 0.9 | The probability of the task offloaded to the cloud if the pool is heavily occupied | |
| 0.7 | The probability of the task offloaded to the cloud if the pool is moderately occupied | |
| 0.3 | The probability of the task offloaded to the cloud if the pool is lightly occupied | |
| 10 | The threshold value to classify the controller pool as heavily occupied | |
| 7 | The threshold value to classify the controller pool as moderately occupied | |
| 3 | The threshold value to classify the controller pool as lightly occupied | |
| 10 M | The maximum number of candidate solutions that the algorithm will attempt to solve within a time-window | |
| , | 23 dBm | Transmission power of , |
| , , , | 3 dBm | Antenna gains |
| dBm | Variance of White Gaussian Noise | |
| f | 2.4 GHz | The system carrier frequency |
| 2 | Air-to-air path loss exponent | |
| , | 1 dBm, 20 dBm | The additional LoS,NLoS attenuation factors due to the LoS,NLoS connections |
| z | 60 | The extra penalty point if the task deadline is missed |
| Role | Class | Proportion | Shape | Color | Priority | ||
|---|---|---|---|---|---|---|---|
| Owner | A | 0.1 | Emergency | White | 0.7 | - | - |
| Owner | B | 0.2 | Fire brigade | Red | 0.3 | - | - |
| Processor | A | 0.06 | Trailer | Purple | - | 2 MBps | 100 MB |
| Processor | B | 0.1 | Trailer | Cyan | - | 1.5 MBps | 70 MB |
| - | - | 0.54 | Passenger | Pink | - | - | - |
| Case ID | Task Failure Ratio | Cloud Ratio | |||||
|---|---|---|---|---|---|---|---|
| Only-Cloud | 1.1 | 5 | 20 | 85.96 | 0.524 | 1 | 0 |
| Only-Cloud | 1.2 | 10 | 20 | 20.36 | 0.144 | 1 | 0 |
| Only-Cloud | 1.3 | 15 | 20 | 9.36 | 0.083 | 1 | 0 |
| AGG-1 | 1.1 | 5 | 20 | 67.29 | 0.396 | 0.384 | 24.89 |
| AGG-1 | 1.2 | 10 | 20 | 30.84 | 0.193 | 0.024 | 11.29 |
| AGG-1 | 1.3 | 15 | 20 | 15.41 | 0.088 | 0.012 | 5.71 |
| AGG-2 | 1.1 | 5 | 20 | 66.43 | 0.405 | 0.377 | 22.13 |
| AGG-2 | 1.2 | 10 | 20 | 29.67 | 0.201 | 0.029 | 11.6 |
| AGG-2 | 1.3 | 15 | 20 | 16.12 | 0.095 | 0.021 | 8.22 |
| ADP | 1.1 | 5 | 20 | 59.22 | 0.339 | 0.517 | 28.14 |
| ADP | 1.2 | 10 | 20 | 28.9 | 0.19 | 0.123 | 19.57 |
| ADP | 1.3 | 15 | 20 | 11.23 | 0.074 | 0.033 | 10.67 |
| Q-OPT | 1.1 | 5 | 20 | 36.56 | 0.237 | 0.227 | 45.46 |
| Q-OPT | 1.2 | 10 | 20 | 6.71 | 0.096 | 0.218 | 17.65 |
| Q-OPT | 1.3 | 15 | 20 | 6.1 | 0.093 | 0.388 | 10.72 |
| Case ID | ||||||
|---|---|---|---|---|---|---|
| Only-Cloud | 2.1 | 5 | 47.31 | 0.199 | 1 | 0 |
| Only-Cloud | 2.2 | 20 | 63.66 | 0.282 | 1 | 0 |
| Only-Cloud | 2.3 | 40 | 71.04 | 0.358 | 1 | 0 |
| AGG-1 | 2.1 | 5 | 209.27 | 153.71 | 13 | 17.46 |
| AGG-1 | 2.2 | 10 | 138.02 | 94.43 | 12 | 20.8 |
| AGG-1 | 2.3 | 15 | 107.07 | 73.59 | 7 | 20.76 |
| AGG-2 | 2.1 | 5 | 200.54 | 160.24 | 1 | 17.45 |
| AGG-2 | 2.2 | 10 | 131.07 | 97.19 | 2 | 20.77 |
| AGG-2 | 2.3 | 15 | 106.64 | 75.82 | 2 | 20.56 |
| ADP | 2.1 | 5 | 194.17 | 149.76 | 0 | 16.27 |
| ADP | 2.2 | 10 | 128.57 | 88.57 | 0 | 20.4 |
| ADP | 2.3 | 15 | 91.34 | 59.75 | 0 | 20.87 |
| Q-OPT | 2.1 | 5 | 94.96 | 33.96 | 0 | 20.73 |
| Q-OPT | 2.2 | 10 | 73.05 | 35.7 | 0 | 20.35 |
| Q-OPT | 2.3 | 15 | 70.44 | 39.34 | 0 | 19.06 |
| Case # | Task Failure Ratio | Cloud Ratio | |||||
|---|---|---|---|---|---|---|---|
| Only-Cloud | 2.1 | 8 | 5 | 47.31 | 0.199 | 1 | 0 |
| Only-Cloud | 2.2 | 8 | 20 | 63.66 | 0.282 | 1 | 0 |
| Only-Cloud | 2.3 | 8 | 40 | 71.04 | 0.358 | 1 | 0 |
| AGG-1 | 2.1 | 8 | 5 | 36.63 | 0.153 | 0.042 | 11.54 |
| AGG-1 | 2.2 | 8 | 20 | 49.35 | 0.211 | 0.01 | 12.45 |
| AGG-1 | 2.3 | 8 | 40 | 72.29 | 0.42 | 0.117 | 21.02 |
| AGG-2 | 2.1 | 8 | 5 | 33.22 | 0.146 | 0.03 | 13.11 |
| AGG-2 | 2.2 | 8 | 20 | 47.03 | 0.212 | 0.015 | 11.54 |
| AGG-2 | 2.3 | 8 | 40 | 73.14 | 0.478 | 0.121 | 17.67 |
| ADP | 2.1 | 8 | 5 | 28.71 | 0.137 | 0.107 | 17.31 |
| ADP | 2.2 | 8 | 20 | 41.35 | 0.197 | 0.086 | 17.64 |
| ADP | 2.3 | 8 | 40 | 66.15 | 0.399 | 0.256 | 29.53 |
| Q-OPT | 2.1 | 8 | 5 | 5.51 | 0.055 | 0.146 | 26.27 |
| Q-OPT | 2.2 | 8 | 20 | 10.08 | 0.033 | 0.133 | 24.11 |
| Q-OPT | 2.3 | 8 | 40 | 30.69 | 0.143 | 0.188 | 35.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalinagac, O.; Gür, G.; Alagöz, F. Prioritization Based Task Offloading in UAV-Assisted Edge Networks. Sensors 2023, 23, 2375. https://doi.org/10.3390/s23052375
Kalinagac O, Gür G, Alagöz F. Prioritization Based Task Offloading in UAV-Assisted Edge Networks. Sensors. 2023; 23(5):2375. https://doi.org/10.3390/s23052375
Chicago/Turabian StyleKalinagac, Onur, Gürkan Gür, and Fatih Alagöz. 2023. "Prioritization Based Task Offloading in UAV-Assisted Edge Networks" Sensors 23, no. 5: 2375. https://doi.org/10.3390/s23052375