
Assessing Handrail-Use Behavior during Stair Ascent or Descent Using Ambient Sensing Technology
Abstract
:1. Introduction
2. Materials and Methods
2.1. Automatic Measurement of Three-Dimensional Human Behavior and Household Environment Using Depth Cameras
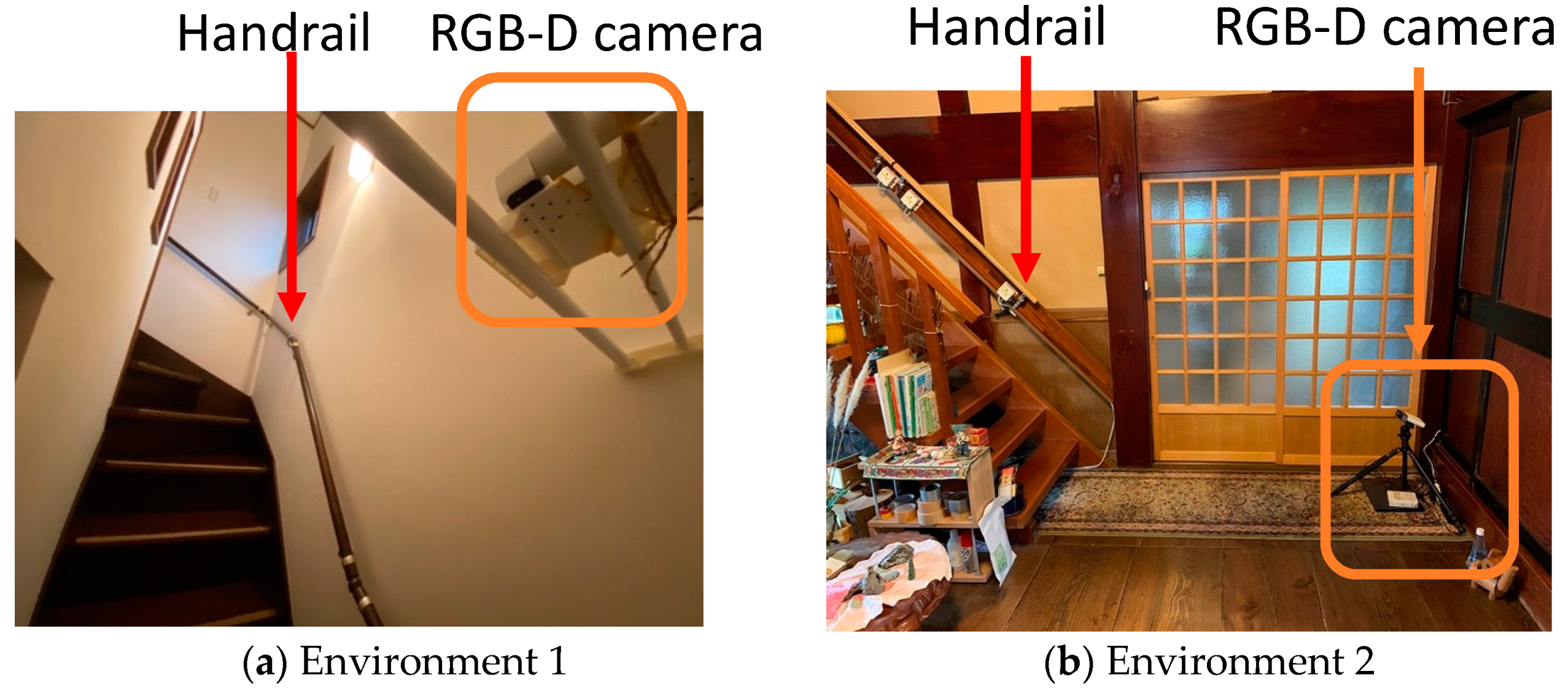
2.2. Measurement Environment and Participants
Observation Environment for Stair Ascending or Descending Activities
2.3. Defining Stair Ascent and Descent Data
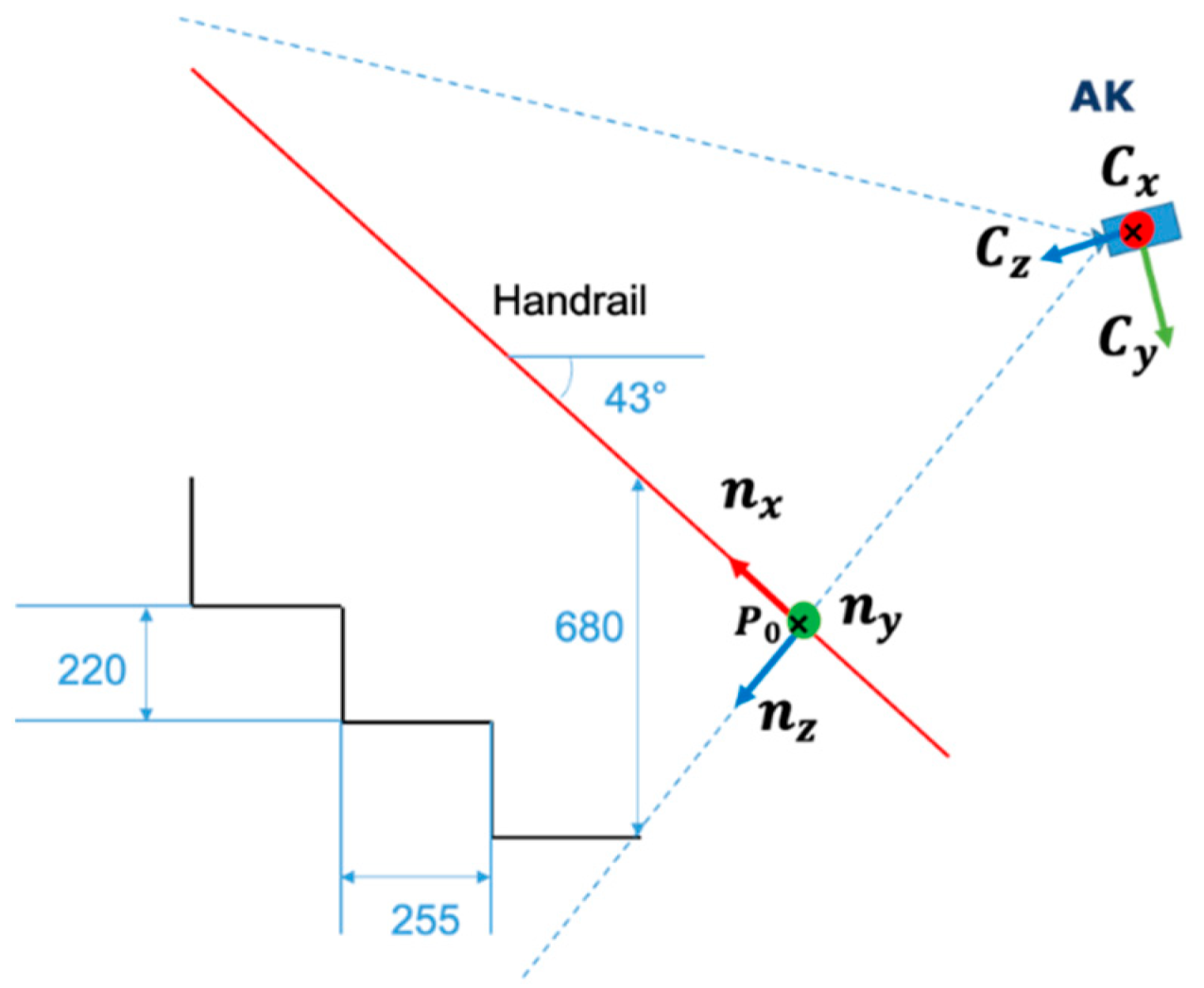
2.3.1. Definition of Stair Local Coordinate System
2.3.2. Obtaining 3D Coordinates
2.3.3. Orthonormal Basis for the Stair Coordinate System
2.3.4. Calculating Stair Ascent and Descent Speed
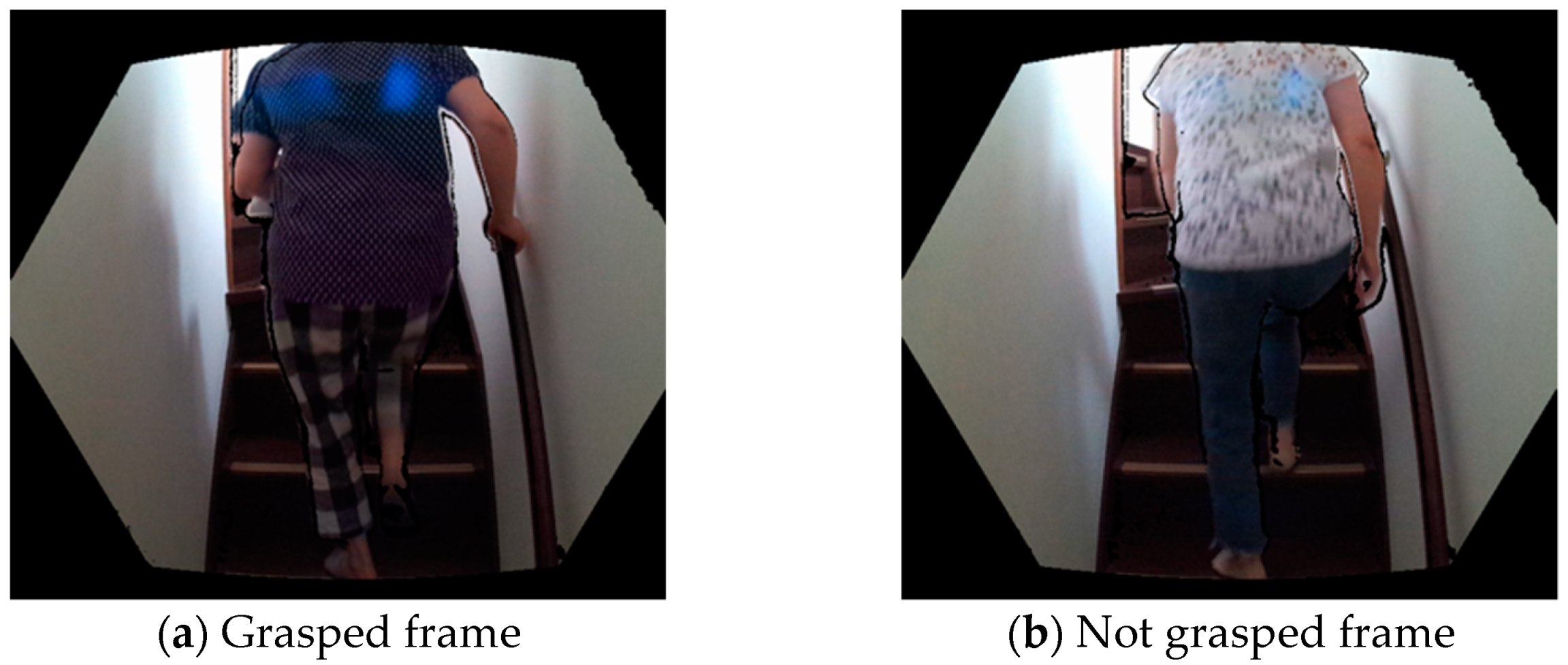
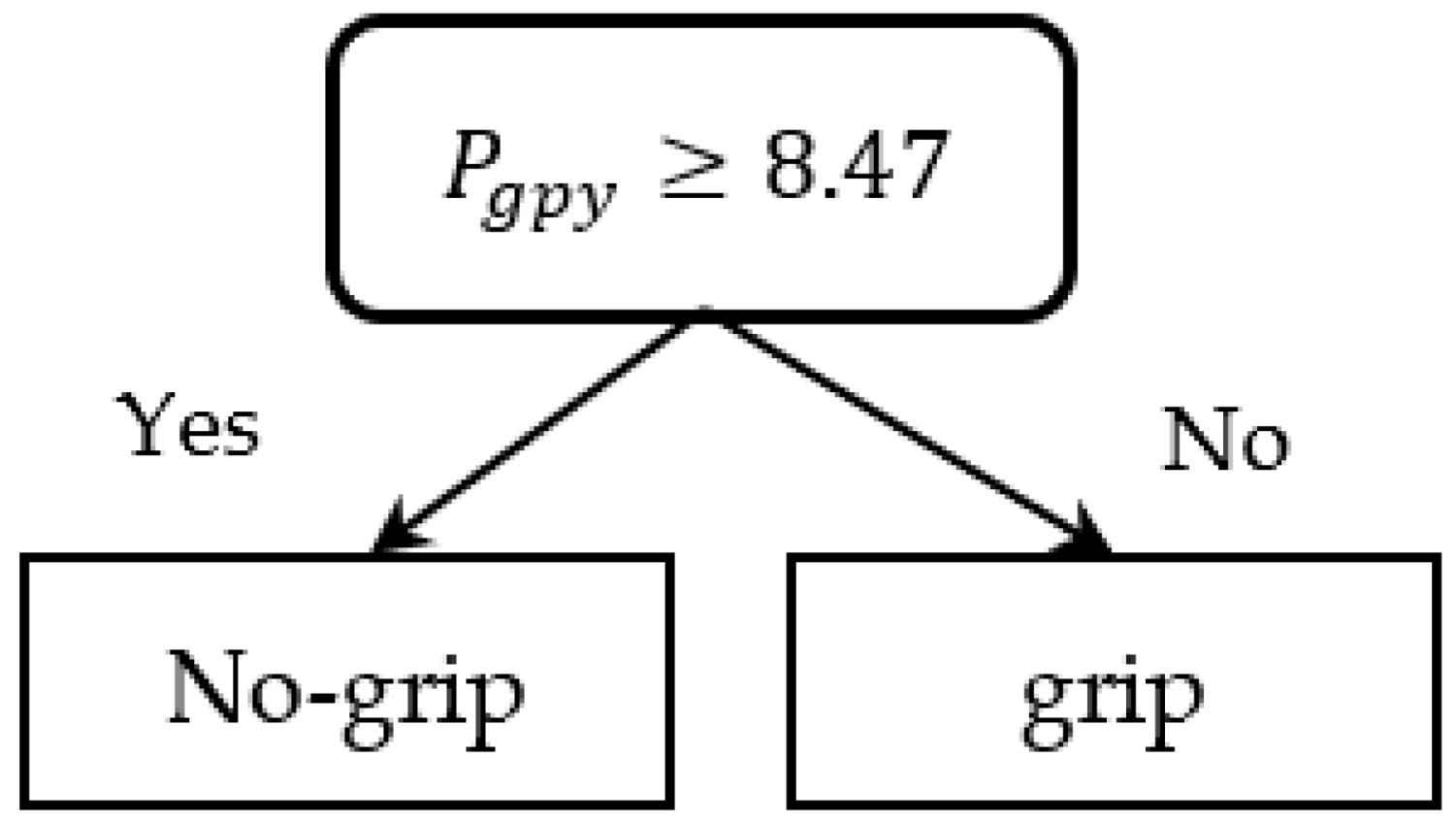
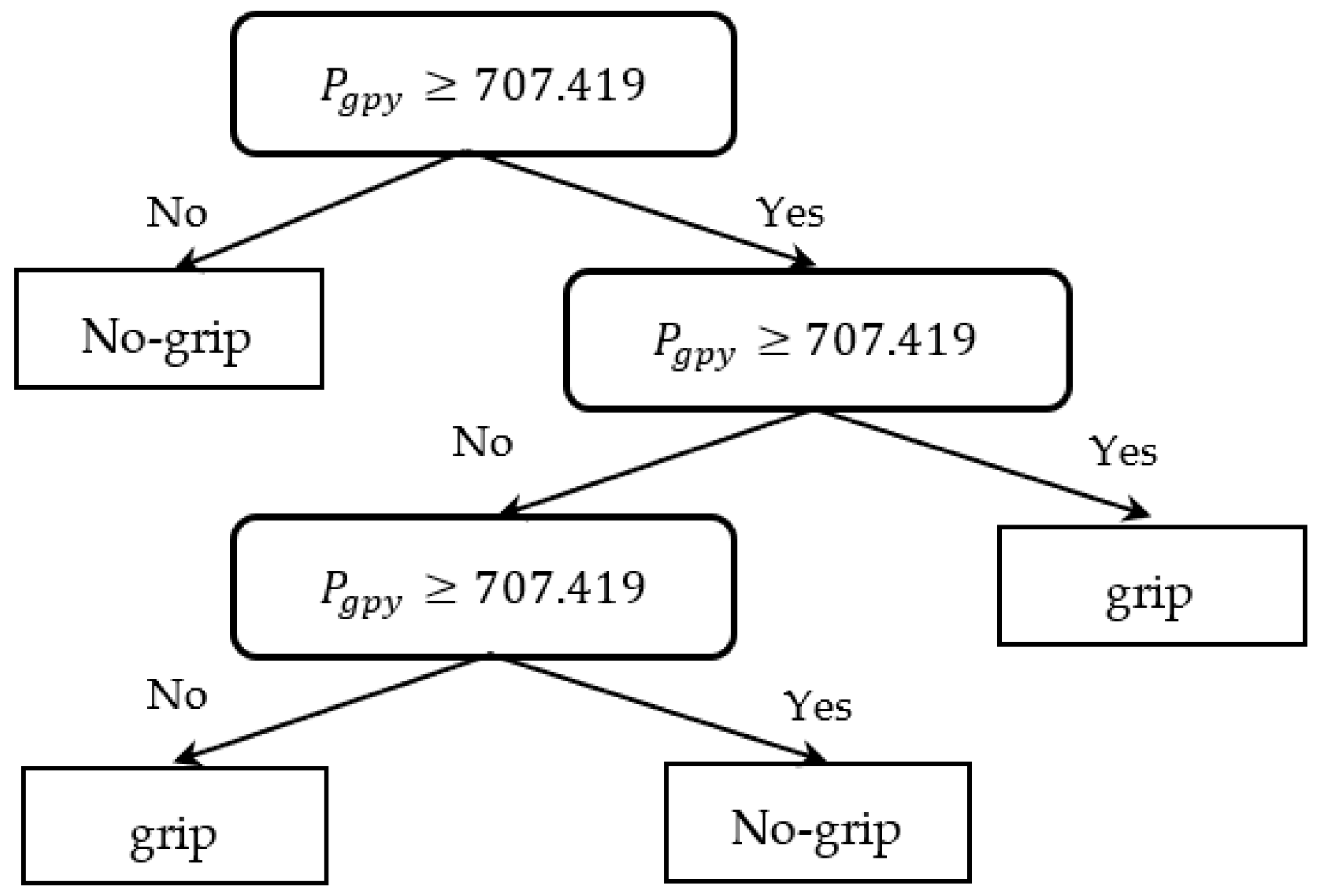
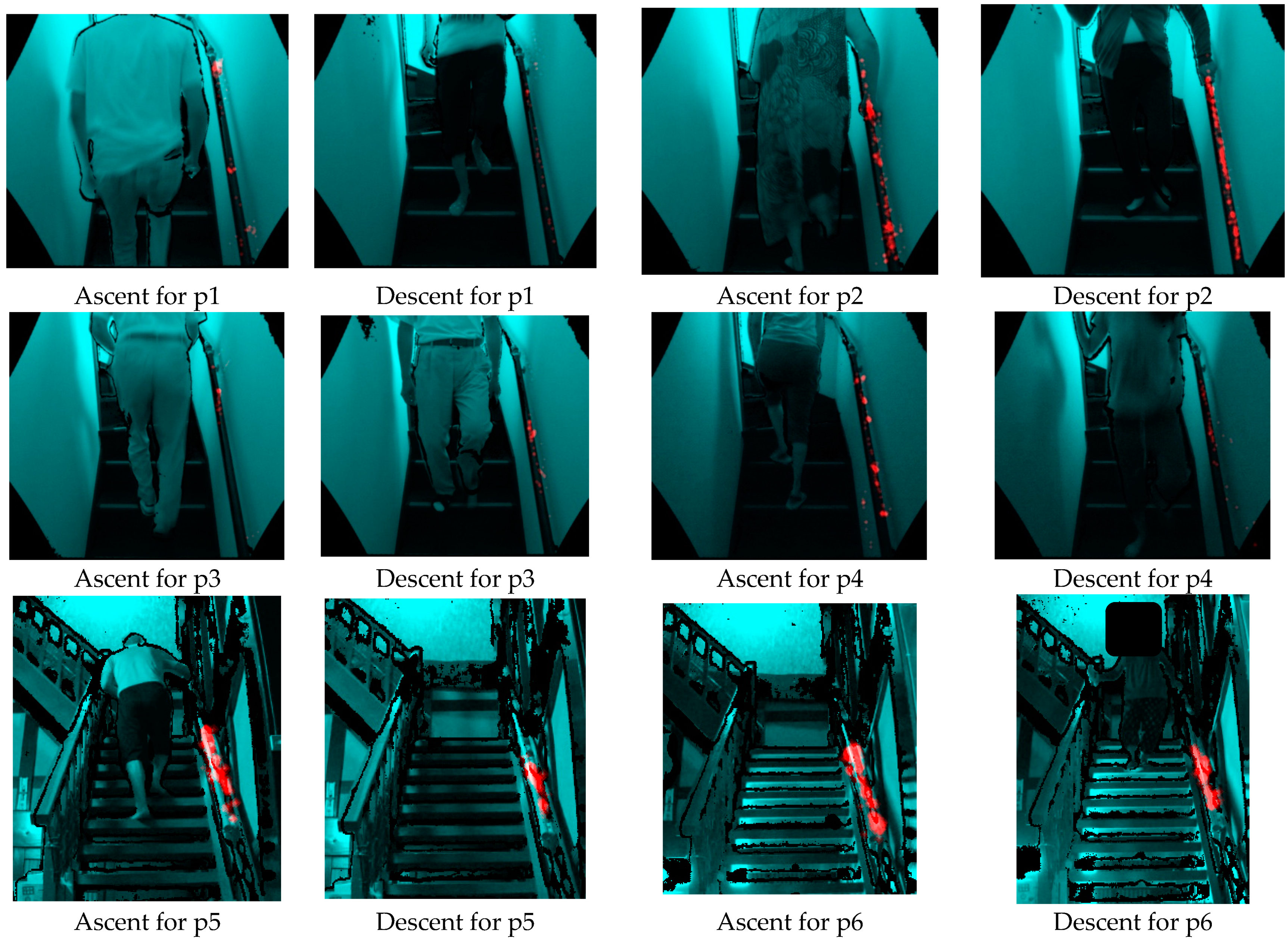
2.4. Determining Handrail Grasping Point
2.5. Evaluating Handrail Grasping Area and Frequency
3. Results
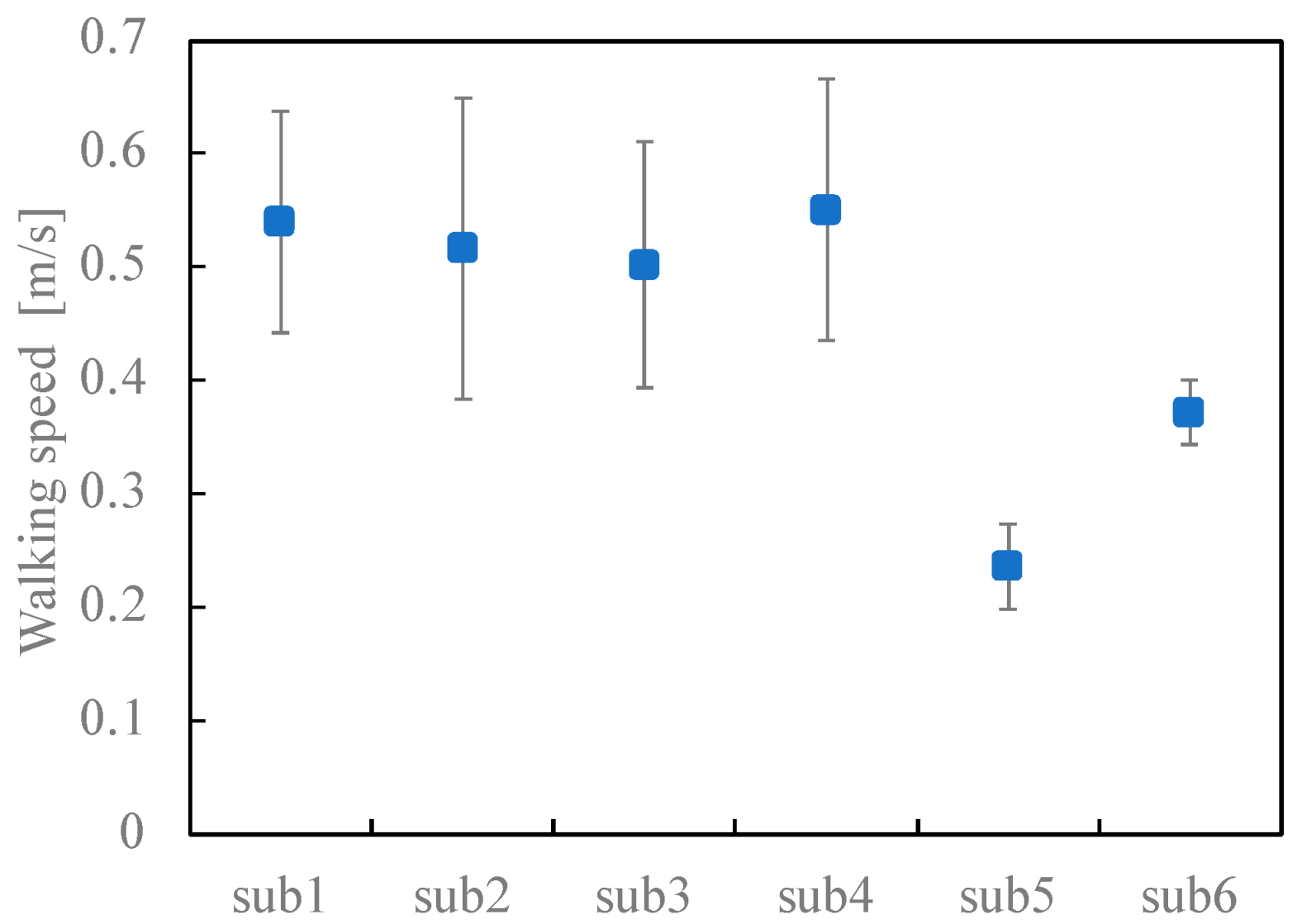
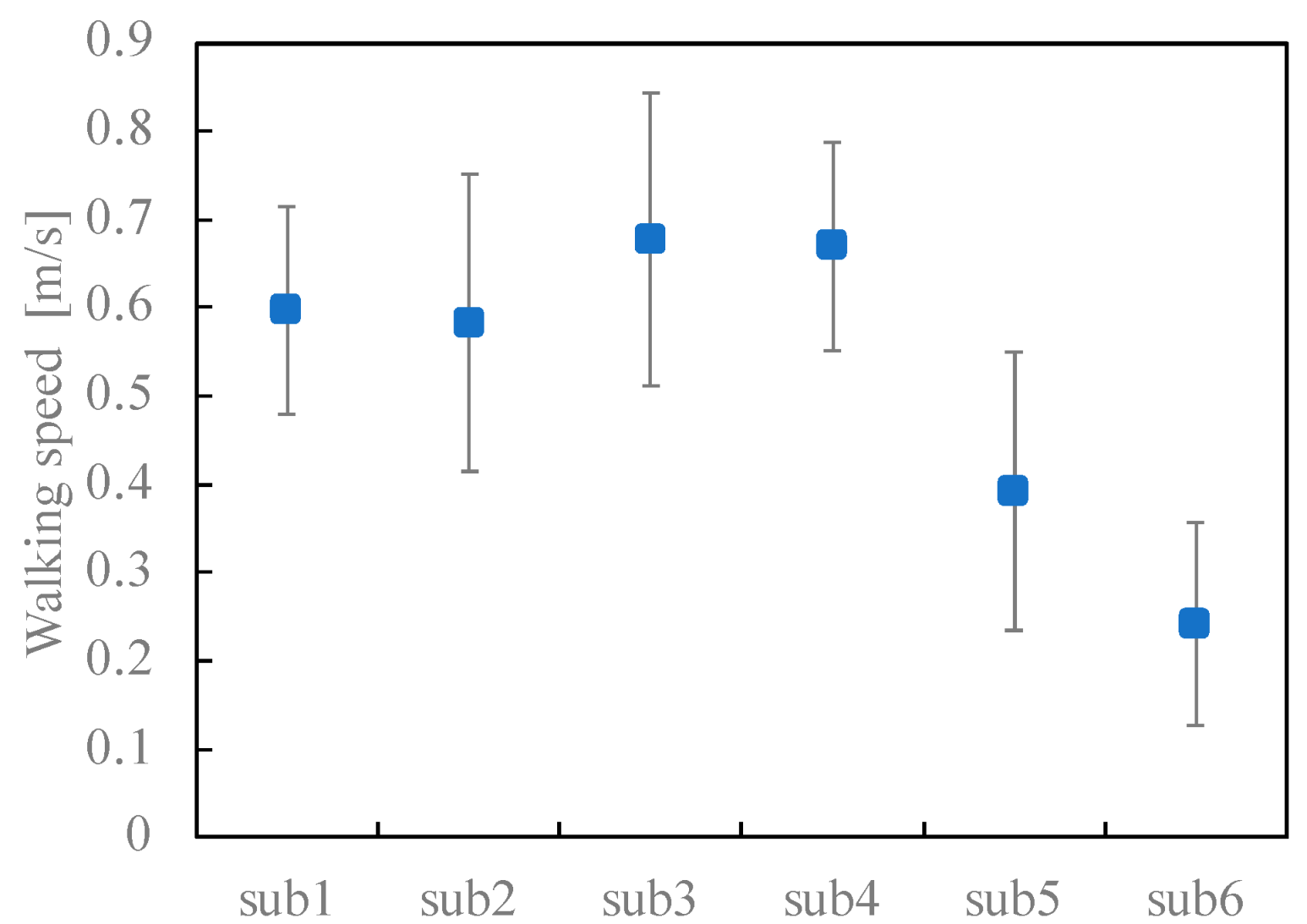
3.1. Stair Ascent and Descent Speed
3.2. Handrail Grasping Ratio and Grasping Area
4. Discussion
Limitations and Future Scope
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- WHO. Ageing and Health. Available online: https://www.who.int/news-room/fact-sheets/detail/ageing-and-health (accessed on 31 October 2022).
- Japan, C.O. Annual Report on the Ageing Society [Summary] FY2021. 2021. Available online: https://www8.cao.go.jp/kourei/english/annualreport/2021/pdf/2021.pdf (accessed on 10 December 2022).
- Fried, L.P.; Tangen, C.M.; Walston, J.; Newman, A.B.; Hirsch, C.; Gottdiener, J.; Seeman, T.; Tracy, R.; Kop, W.J.; Burke, G.; et al. Frailty in older adults: Evidence for a phenotype. J. Gerontol. A Biol. Sci. Med. Sci. 2001, 56, M146–M156. [Google Scholar] [CrossRef] [PubMed]
- Clegg, A.; Young, J.; Iliffe, S.; Rikkert, M.O.; Rockwood, K. Frailty in elderly people. Lancet 2013, 381, 752–762. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Buchner, D.M.; Wagner, E.H. Preventing frail health. Clin. Geriatr. Med. 1992, 8, 1–18. [Google Scholar] [CrossRef]
- Shinkai, S.; Watanabe, N.; Yoshida, H.; Fujiwara, Y.; Amano, H.; Lee, S.; NIshi, M.; Tsuchiya, Y. Research on screening for frailty: Development of "the Kaigo-Yobo Checklist. Jpn. J. Public Health 2010, 57, 345–354. [Google Scholar] [CrossRef]
- Sewo Sampaio, P.Y.; Sampaio, R.A.; Yamada, M.; Arai, H. Systematic review of the Kihon Checklist: Is it a reliable assessment of frailty? Geriatr. Gerontol. Int. 2016, 16, 893–902. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.P.; Kim, S.; Joh, J.Y.; Hwang, H.S. Effect of interaction between dynapenic component of the European working group on sarcopenia in older people sarcopenia criteria and obesity on activities of daily living in the elderly. J. Am. Med. Dir. Assoc. 2014, 15, 371.e1–371.e5. [Google Scholar] [CrossRef]
- Satake, S.; Shimokata, H.; Senda, K.; Kondo, I.; Toba, K. Validity of Total Kihon Checklist Score for Predicting the Incidence of 3-Year Dependency and Mortality in a Community-Dwelling Older Population. J. Am. Med. Dir. Assoc. 2017, 18, 552.e1–552.e6. [Google Scholar] [CrossRef]
- Kojima, G.; Taniguchi, Y.; Kitamura, A.; Shinkai, S. Are the Kihon Checklist and the Kaigo-Yobo Checklist Compatible With the Frailty Index? J. Am. Med. Dir. Assoc. 2018, 19, 797–800.e792. [Google Scholar] [CrossRef]
- Reuben, D.B.; Siu, A.L. An objective measure of physical function of elderly outpatients. The Physical Performance Test. J. Am. Geriatr. Soc. 1990, 38, 1105–1112. [Google Scholar] [CrossRef]
- Dubois, A.; Bihl, T.; Bresciani, J.P. Identifying Fall Risk Predictors by Monitoring Daily Activities at Home Using a Depth Sensor Coupled to Machine Learning Algorithms. Sensors 2021, 21, 1957. [Google Scholar] [CrossRef]
- Stone, E.E.; Skubic, M. Unobtrusive, continuous, in-home gait measurement using the Microsoft Kinect. IEEE Trans. Biomed. Eng. 2013, 60, 2925–2932. [Google Scholar] [CrossRef]
- Phillips, L.J.; DeRoche, C.B.; Rantz, M.; Alexander, G.L.; Skubic, M.; Despins, L.; Abbott, C.; Harris, B.H.; Galambos, C.; Koopman, R.J. Using Embedded Sensors in Independent Living to Predict Gait Changes and Falls. West. J. Nurs. Res. 2017, 39, 78–94. [Google Scholar] [CrossRef]
- Parajuli, M.; Dat, T.; Wanli, M.; Sharma, D. Senior health monitoring using Kinect. In Proceedings of the 2012 Fourth International Conference on Communications and Electronics (ICCE), Hue, Vietnam, 1–3 August 2012; pp. 309–312. [Google Scholar]
- Jang, J.; Kim, D.; Park, C.; Jang, M.; Lee, J.; Kim, J. ETRI-Activity3D: A Large-Scale RGB-D Dataset for Robots to Recognize Daily Activities of the Elderly. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 10990–10997. [Google Scholar]
- Murata, E.; Kitamura, K.; Oono, M.; Shirato, Y.; Nishida, Y. Behavior Monitoring with Non-wearable Sensors for Precision Nursing. In Proceedings of the AHFE 2017 International Conference on Safety Management and Human Factors, Los Angeles, CA, USA, 17–21 July 2018; pp. 384–392. [Google Scholar]
- Nishida, Y.; Kitamura, K. Living Function-Resilient Society in the Centenarian Era: Living Safety Technology Based on Connective, Artificial Intelligence. In IoT and Smart Home Automation [Working Title]; IntechOpen: Rijeka, Croatia, 2019. [Google Scholar]
- AIST. Elderly behavior library. Available online: https://www.behavior-library-meti.com/behaviorLib/homes/about (accessed on 29 October 2022).
- Hirano, K.; Shoda, K.; Kitamura, K.; Miyazaki, Y.; Nishida, Y. Method for Behavior Normalization to Enable Comparative Understanding of Interactions of Elderly Persons with Consumer Products using a Behavior Video Database. Procedia Comput. Sci. 2019, 160, 409–416. [Google Scholar] [CrossRef]
- Miyazaki, Y.; Hirano, K.; Kitamura, K.; Nishida, Y. Analysis of Relationship between Natural Standing Behavior of Elderly People and a Class of Standing Aids in a Living Space. Sensors 2022, 22, 1178. [Google Scholar] [CrossRef]
- Kawai, H.; Obuchi, S.; Watanabe, Y.; Hirano, H.; Fujiwara, Y.; Ihara, K.; Kim, H.; Kobayashi, Y.; Mochimaru, M.; Tsushima, E.; et al. Association between Daily Living Walking Speed and Walking Speed in Laboratory Settings in Healthy Older Adults. Int. J. Environ. Res. Public Health 2020, 17, 2707. [Google Scholar] [CrossRef] [Green Version]
- Microsoft. Azure Kinect Body Traclking Joints. Available online: https://learn.microsoft.com/en-us/azure/kinect-dk/body-joints (accessed on 10 December 2022).
- Katayama, O.; Lee, S.; Bae, S.; Makino, K.; Chiba, I.; Harada, K.; Shinkai, Y.; Shimada, H. The association between social activity and physical frailty among community-dwelling older adults in Japan. BMC Geriatr. 2022, 22, 870. [Google Scholar] [CrossRef]
- Regnersgaard, S.; Knudsen, A.K.; Lindskov, F.O.; Mratinkovic, M.; Pressel, E.; Ingersen, A.; Dela, F. Down stair walking: A simple method to increase muscle mass and performance in 65+ year healthy people. Eur. J. Sport. Sci. 2022, 22, 279–288. [Google Scholar] [CrossRef]
- Siebers, H.L.; Eschweiler, J.; Michalik, R.; Migliorini, F.; Tingart, M.; Betsch, M. Biomechanical compensation mechanisms during stair climbing—The effect of leg length inequalities. Gait. Posture 2022, 91, 290–296. [Google Scholar] [CrossRef]
- Moniz-Pereira, V.; Kepple, T.M.; Cabral, S.; Joao, F.; Veloso, A.P. Joint moments’ contributions to vertically accelerate the center of mass during stair ambulation in the elderly: An induced acceleration approach. J. Biomech. 2018, 79, 105–111. [Google Scholar] [CrossRef]
- Chen, T.C.; Hsieh, C.C.; Tseng, K.W.; Ho, C.C.; Nosaka, K. Effects of Descending Stair Walking on Health and Fitness of Elderly Obese Women. Med. Sci. Sports Exerc. 2017, 49, 1614–1622. [Google Scholar] [CrossRef]
- Brodie, M.A.; Wang, K.; Delbaere, K.; Persiani, M.; Lovell, N.H.; Redmond, S.J.; Del Rosario, M.B.; Lord, S.R. New Methods to Monitor Stair Ascents Using a Wearable Pendant Device Reveal How Behavior, Fear, and Frailty Influence Falls in Octogenarians. IEEE Trans. Biomed. Eng. 2015, 62, 2595–2601. [Google Scholar] [CrossRef] [PubMed]
- Roth, N.; Ullrich, M.; Kuderle, A.; Gladow, T.; Marxreiter, F.; Gassner, H.; Kluge, F.; Klucken, J.; Eskofier, B.M. Real-World Stair Ambulation Characteristics Differ Between Prospective Fallers and Non-Fallers in Parkinson’s Disease. IEEE J. Biomed. Health Inform. 2022, 26, 4733–4742. [Google Scholar] [CrossRef] [PubMed]
- Reeves, N.D.; Spanjaard, M.; Mohagheghi, A.A.; Baltzopoulos, V.; Maganaris, C.N. Older adults employ alternative strategies to operate within their maximum capabilities when ascending stairs. J. Electromyogr. Kinesiol. 2009, 19, e57–e68. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.J.; Chou, L.S. Balance control during stair negotiation in older adults. J. Biomech. 2007, 40, 2530–2536. [Google Scholar] [CrossRef]
- Larsen, A.H.; Puggaard, L.; Hamalainen, U.; Aagaard, P. Comparison of ground reaction forces and antagonist muscle coactivation during stair walking with ageing. J. Electromyogr. Kinesiol. 2008, 18, 568–580. [Google Scholar] [CrossRef]
- Larsen, A.H.; Sorensen, H.; Puggaard, L.; Aagaard, P. Biomechanical determinants of maximal stair climbing capacity in healthy elderly women. Scand. J. Med. Sci. Sports 2009, 19, 678–686. [Google Scholar] [CrossRef]
- Li, Y.; Song, Q.; Li, L.; Sun, W.; Zhang, C. Tai Chi practitioners have lower fall risks under dual-task conditions during stair descending. PLoS ONE 2021, 16, e0246292. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predicted | ||
|---|---|---|
| Non Grip | Grip | |
| Non grip (n = 139) | 117 | 22 |
| Grip (n = 136) | 14 | 122 |
| Predicted | ||
|---|---|---|
| Non-Grip | Grip | |
| Non-grip (n = 41) | 29 | 12 |
| Grip (n = 74) | 5 | 69 |
| Participant | Ascent (m/s) | Descent (m/s) | p | ||||
|---|---|---|---|---|---|---|---|
| n | Mean | SD | n | Mean | SD | ||
| p1 | 84 | 0.5398 | 0.0976 | 88 | 0.5970 | 0.1185 | <0.01 |
| p2 | 38 | 0.5164 | 0.1326 | 38 | 0.5828 | 0.1676 | 0.0593 |
| p3 | 57 | 0.5024 | 0.1089 | 52 | 0.6763 | 0.1664 | <0.01 |
| p4 | 20 | 0.5502 | 0.1151 | 20 | 0.6698 | 0.1177 | <0.01 |
| p5 | 5 | 0.2371 | 0.0376 | 7 | 0.3916 | 0.1573 | 0.0595 |
| p6 | 5 | 0.3722 | 0.0285 | 5 | 0.2419 | 0.1137 | <0.05 |
| p1 (n = 2126) | p2 (n = 856) | p3 (n = 1406) | p4 (n = 633) | p5 (n = 103) | p6 (n = 135) |
|---|---|---|---|---|---|
| 4.6% | 25% | 2.5% | 19% | 81.6% | 76.3% |
| p1 (n = 1193) | p2 (n = 382) | p3 (n = 565) | p4 (n = 365) | p5 (n = 85) | p6 (n = 84) |
|---|---|---|---|---|---|
| 3.8% | 51% | 8.7% | 9.3% | 48.2% | 83.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miyazaki, Y.; Shoda, K.; Kitamura, K.; Nishida, Y. Assessing Handrail-Use Behavior during Stair Ascent or Descent Using Ambient Sensing Technology. Sensors 2023, 23, 2236. https://doi.org/10.3390/s23042236
Miyazaki Y, Shoda K, Kitamura K, Nishida Y. Assessing Handrail-Use Behavior during Stair Ascent or Descent Using Ambient Sensing Technology. Sensors. 2023; 23(4):2236. https://doi.org/10.3390/s23042236
Chicago/Turabian StyleMiyazaki, Yusuke, Kohei Shoda, Koji Kitamura, and Yoshifumi Nishida. 2023. "Assessing Handrail-Use Behavior during Stair Ascent or Descent Using Ambient Sensing Technology" Sensors 23, no. 4: 2236. https://doi.org/10.3390/s23042236