
Detection of Wheel Polygonization Based on Wayside Monitoring and Artificial Intelligence
 , , ,
, , ,  , and
, and 
Abstract
:1. Introduction
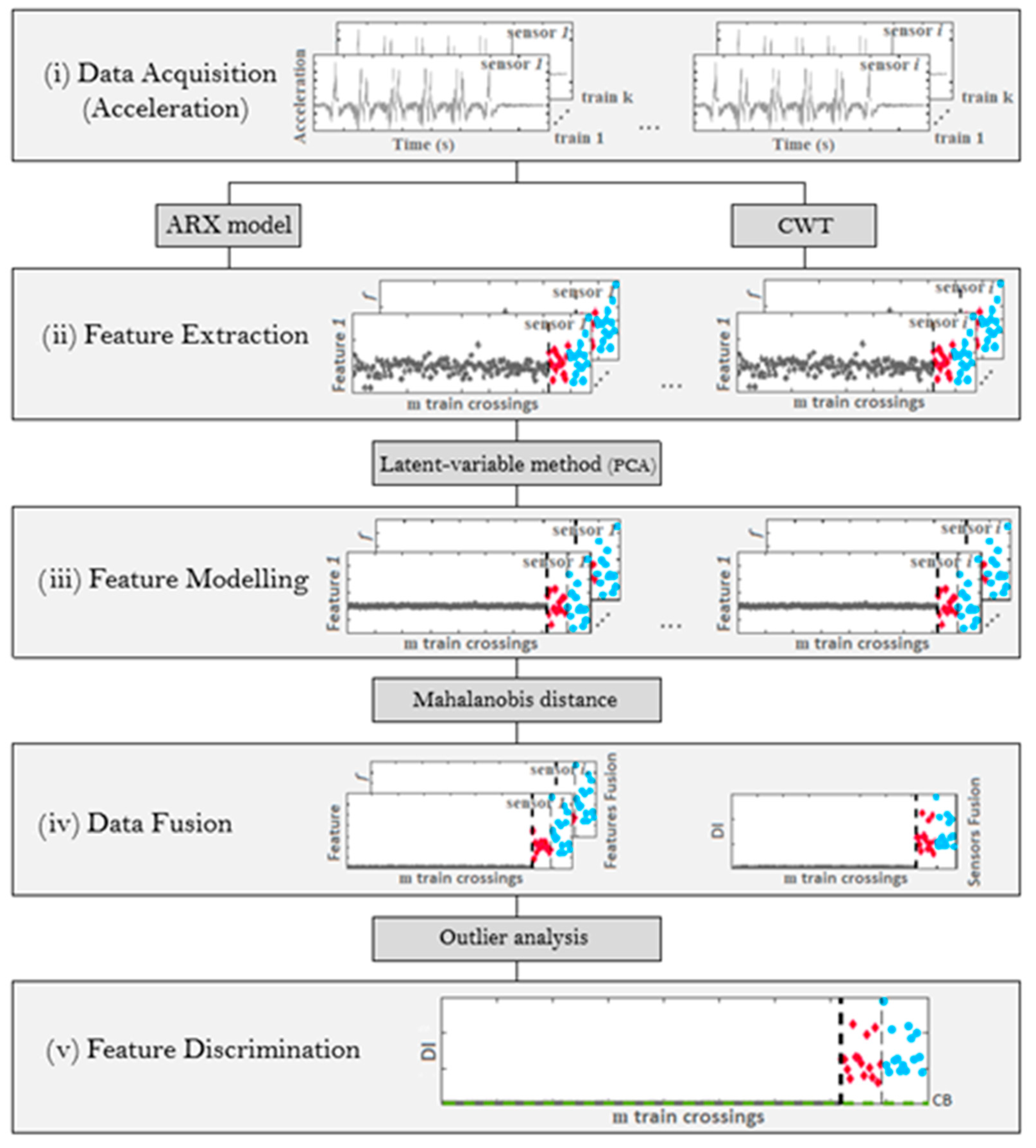
2. Proposed Methodology for Automatic Wheel Polygonization Detection
- (i)
- Data acquisition from accelerometers.
- (ii)
- Feature extraction from multiple sensor signals, by continuous wavelet transforms (CWT) or autoregressive exogenous (ARX) models, that are separately implemented, and their performances are compared; in this step, a time record is transformed into features that are damage sensitive.
- (iii)
- Feature modeling based on the Principal Component Analysis (PCA) technique that not only normalizes the extracted features but also increases their sensitivity to damage.
- (iv)
- Data fusion by applying Mahalanobis distances (MDs) to the features to enhance their sensitivity. By using the Mahalanobis distance, the features from each sensor can be effectively merged in the first stage. Moreover, a new Mahalanobis distance is applied again in the second stage to integrate all sensor information. The outcome of this step is a damage indicator (DI), for each train passage.
- (v)
- Feature discrimination is performed by statistical analysis to determine whether a DI identifies a healthy or a defective wheel; a statistical confidence boundary (CB) is estimated based on an inverse cumulative distribution function.
2.1. Feature Extraction
2.1.1. ARX Model
2.1.2. CWT
2.2. Feature Modeling
2.3. Data Fusion
2.4. Feature Discrimination
3. Numerical Models
3.1. Train
3.2. Track
3.3. Track Irregularities
3.4. Wheel Polygonization Profiles
3.5. Train-Track Dynamic Interaction
4. Simulation of Baseline and Damaged Scenarios
5. Automatic Wheel Polygonization Detection
5.1. Feature Extraction—ARX vs. CWT
5.2. Feature Normalization–PCA
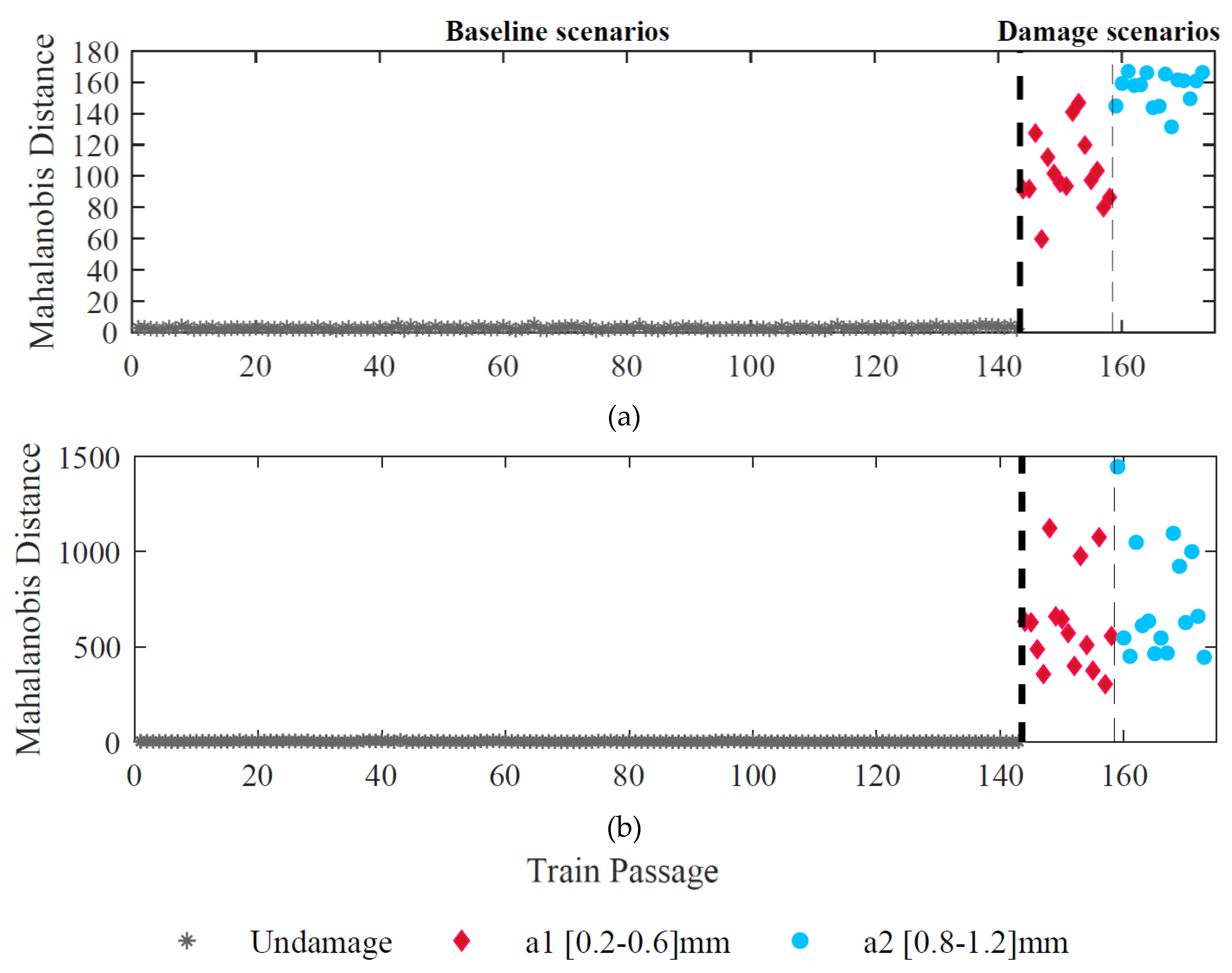
5.3. Data Fusion—Mahalanobis Distance
5.4. Automatic Detection—Outlier Analysis
6. Sensitivity Analysis
6.1. Sensitivity Analysis to The Number of Sensors
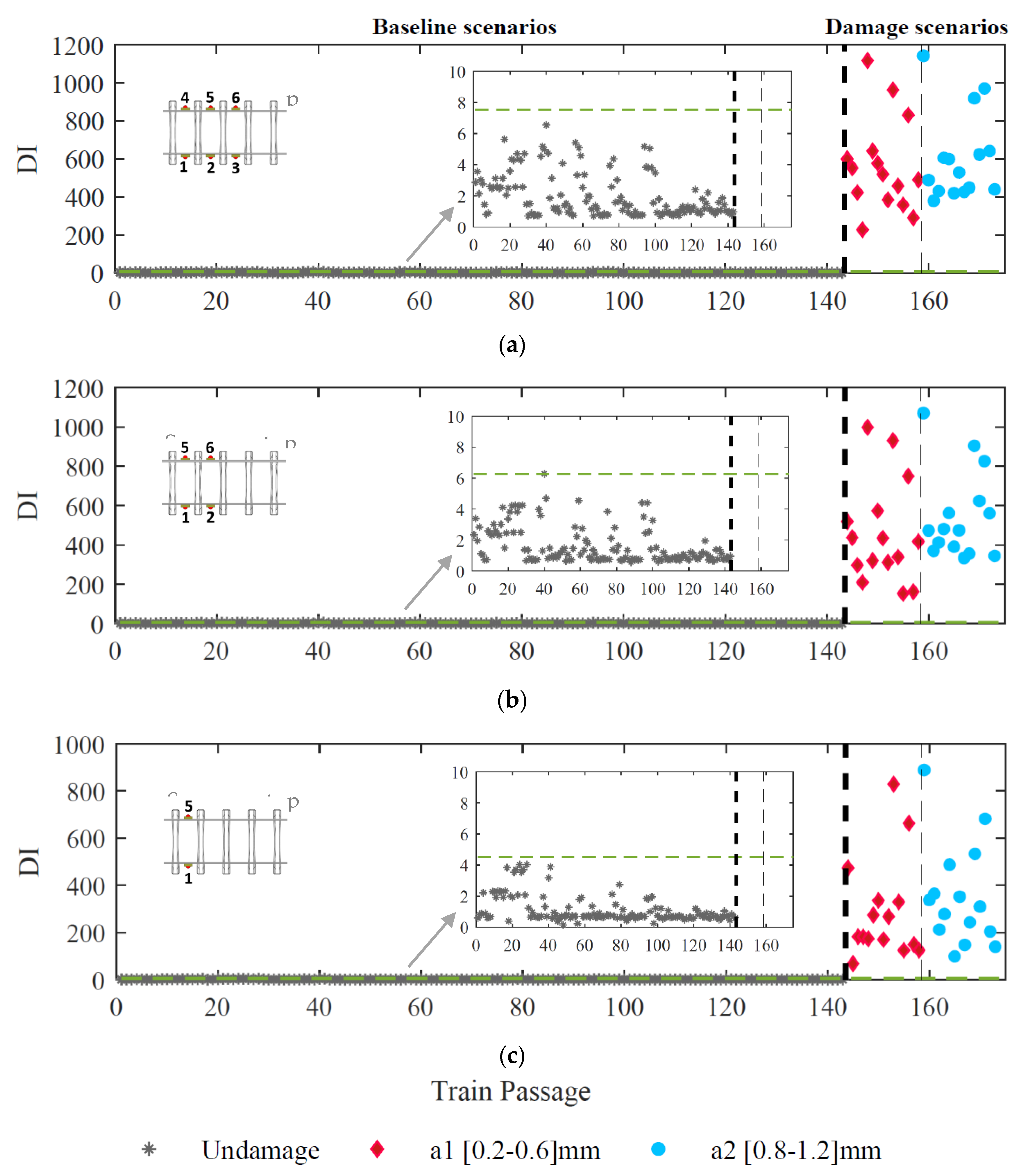
6.2. Sensitivity Analysis to the Location of Sensors
7. Conclusions
- i.
- the proposed methodology is robust and cost-effective for detecting wheel defects under real-world conditions. A healthy wheel can be distinguished from a polygonized one, regardless of the rail irregularities, train speed, and train loading;
- ii.
- the methodology can successfully detect all damage scenarios without any false positives or negatives when the input signals are evaluated using a CWT technique as a feature extraction; when considering the ARX model in the feature extraction, some false positive detections can be observed, which allows concluding that the use of this technique leads to a slightly less efficient polygonized wheel detection;
- iii.
- the system is always able to detect polygonized wheels despite the location of sensors in the track (rail or sleeper), which is a significant advantage regarding the installation process;
- iv.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lagnebäck, R. Evaluation of Wayside Condition Monitoring Technologies for Condition-Based Maintenance of Railway Vehicles. Ph.D. Thesis, Luleå University of Technology, Luleå, Sweden, 2007. [Google Scholar]
- Meixedo, A.; Ribeiro, D.; Calçada, R.; Delgado, R. Dynamic behaviour of a railway viaduct with precast deck. In Proceedings of the 9th International Conference on Structural Dynamics, Porto, Portugal, 30 June–2 July 2014. [Google Scholar]
- Vale, C.; Calçada, R. A Dynamic Vehicle-Track Interaction Model for Predicting the Track Degradation Process. J. Infrastruct. Syst. 2014, 20, 04014016. [Google Scholar] [CrossRef]
- Vale, C.; Ribeiro, N.; Calçada, R.; Delgado, R. Dynamics of a precast system for high-speed railway tracks. In Proceedings of the ECCOMAS Thematic Conference—COMPDYN 2011: 3rd International Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Corfu, Greece, 25–28 May 2011. [Google Scholar]
- Alves, V.; Meixedo, A.; Ribeiro, D.; Calçada, R.; Cury, A. Evaluation of the Performance of Different Damage Indicators in Railway Bridges. Procedia Eng. 2015, 114, 746–753. [Google Scholar] [CrossRef] [Green Version]
- Vale, C.; Bonifácio, C.; Seabra, J.; Calçada, R.; Mazzino, N.; Elisa, M.; Terribile, S.; Anguita, D.; Fumeo, E.; Saborido, C.; et al. Novel Efficient Technologies in Europe for Axle Bearing Condition Monitoring—The MAXBE Project. Transp. Res. Procedia 2016, 14, 635–644. [Google Scholar] [CrossRef] [Green Version]
- Pimentel, R.; Ribeiro, D.; Matos, L.; Mosleh, A.; Calçada, R. Bridge Weigh-in-Motion system for the identification of train loads using fiber-optic technology. Structures 2021, 30, 1056–1070. [Google Scholar] [CrossRef]
- Pintão, B.; Mosleh, A.; Vale, C.; Montenegro, P.; Costa, P. Development and Validation of a Weigh-in-Motion Methodology for Railway Tracks. Sensors 2022, 22, 1976. [Google Scholar] [CrossRef] [PubMed]
- Ni, Y.Q.; Zhang, Q.H. A Bayesian machine learning approach for online detection of railway wheel defects using track-side monitoring. Struct. Health Monit. 2021, 20, 1536–1550. [Google Scholar] [CrossRef]
- Chong, S.Y.; Lee, J.R.; Shin, H.J. A review of health and operation monitoring technologies for trains. Smart Struct. Syst. 2010, 6, 1079–1105. [Google Scholar] [CrossRef]
- Vale, C. Wheel Flats in the Dynamic Behavior of Ballasted and Slab Railway Tracks. Appl. Sci. 2021, 11, 7127. [Google Scholar] [CrossRef]
- Nielsen, J.C.O.; Johansson, A. Out-of-round railway wheels-a literature survey. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2000, 214, 79–91. [Google Scholar] [CrossRef]
- Wu, X.; Chi, M.; Wu, P. Influence of polygonal wear of railway wheels on the wheel set axle stress. Veh. Syst. Dyn. 2015, 53, 1535–1554. [Google Scholar] [CrossRef]
- Wu, X.; Rakheja, S.; Qu, S.; Wu, P.; Zeng, J.; Ahmed, A.K. Dynamic responses of a high-speed railway car due to wheel polygonalisation. Veh. Syst. Dyn. 2018, 56, 1817–1837. [Google Scholar] [CrossRef]
- Meixedo, A.; Santos, J.; Ribeiro, D.; Calçada, R.; Todd, M. Damage detection in railway bridges using traffic-induced dynamic responses. Eng. Struct. 2021, 238, 112189. [Google Scholar] [CrossRef]
- Mosleh, A.; Meixedo, A.; Ribeiro, D.; Montenegro, P.; Calçada, R. Early wheel flat detection: An automatic data-driven wavelet-based approach for railways. Veh. Syst. Dyn. 2022, 1–30. [Google Scholar] [CrossRef]
- Meixedo, A.; Ribeiro, D.; Santos, J.; Calçada, R.; Todd, M.D. Real-Time Unsupervised Detection of Early Damage in Railway Bridges Using Traffic-Induced Responses. In Structural Health Monitoring Based on Data Science Techniques; Cury, A., Ribeiro, D., Ubertini, F., Todd, M.D., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 117–142. [Google Scholar]
- Meixedo, A.G. Damage identification in railway bridges based on train induced dynamic responses, in Civil engineering. Ph.D. Thesis, Faculty of Engineering of the University of Porto, Porto, Portugal, 2021. [Google Scholar]
- Sun, Q.; Chen, C.; Kemp, A.H.; Brooks, P. An on-board detection framework for polygon wear of railway wheel based on vibration acceleration of axle-box. Mech. Syst. Signal Process. 2021, 153, 107540. [Google Scholar] [CrossRef]
- Wang, Q.; Xiao, Z.; Zhou, J.; Gong, D.; Zhang, Z.; Wang, Z.; Wang, T.; He, Y. A dynamic detection method for polygonal wear of railway wheel based on parametric power spectral estimation. Veh. Syst. Dyn. 2022, 1–23. [Google Scholar] [CrossRef]
- Chen, S.; Wang, K.; Zhou, Z.; Yang, Y.; Chen, Z.; Zhai, W. Quantitative detection of locomotive wheel polygonization under non-stationary conditions by adaptive chirp mode decomposition. Railw. Eng. Sci. 2022, 30, 129–147. [Google Scholar] [CrossRef]
- Mosleh, A.; Meixedo, A.; Ribeiro, D.; Montenegro, P.; Calçada, R. Automatic clustering-based approach for train wheels condition monitoring. Int. J. Rail Transp. 2022, 1–26. [Google Scholar] [CrossRef]
- Shin, S.W.; Yun, C.B.; Futura, H.; Popovics, J.S. Nondestructive Evaluation of Crack Depth in Concrete Using PCA-compressed Wave Transmission Function and Neural Networks. Exp. Mech. 2008, 48, 225–231. [Google Scholar] [CrossRef]
- Meixedo, A.; Ribeiro, D.; Santos, J.; Calçada, R.; Todd, M. Structural health monitoring strategy for damage detection in railway bridges using traffic induced dynamic responses. In Rail Infrastructure Resilience; Calçada, R., Kaewunruen, S., Eds.; Woodhead Publishing: Cambridge, UK, 2022; pp. 389–408. [Google Scholar]
- Qian, L.; Zhang, L.; Bao, X.; Li, F.; Yang, J. Supervised sparse neighbourhood preserving embedding. IET Image Process. 2017, 11, 190–199. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, Y.; Mu, F.; Cheng, J.; Li, C.; Chen, X. Multimodal MRI Volumetric Data Fusion With Convolutional Neural Networks. IEEE Trans. Instrum. Meas. 2022, 71, 4006015. [Google Scholar] [CrossRef]
- Pan, Y.; Sun, Y.; Li, Z.; Gardoni, P. Machine learning approaches to estimate suspension parameters for performance degradation assessment using accurate dynamic simulations. Reliab. Eng. Syst. Saf. 2023, 230, 108950. [Google Scholar] [CrossRef]
- Kontolati, K.; Loukrezis, D.; dos Santos, K.R.; Giovanis, D.G.; Shields, M.D. Manifold learning-based polynomial chaos expansions for high-dimensional surrogate models. Int. J. Uncertain. Quantif. 2022, 12, 39–64. [Google Scholar] [CrossRef]
- Wang, J.; Xie, J.; Zhao, R.; Zhang, L.; Duan, L. Multisensory fusion based virtual tool wear sensing for ubiquitous manufacturing. Robot. Comput. -Integr. Manuf. 2017, 45, 47–58. [Google Scholar] [CrossRef] [Green Version]
- Yan, A.M.; Kerschen, G.; De Boe, P.; Golinval, J.C. Structural damage diagnosis under varying environmental conditions—Part I: A linear analysis. Mech. Syst. Signal Process. 2005, 19, 847–864. [Google Scholar] [CrossRef]
- Li, Y.; Zuo, M.J.; Lin, J.; Liu, J. Fault detection method for railway wheel flat using an adaptive multiscale morphological filter. Mech. Syst. Signal Process. 2017, 84, 642–658. [Google Scholar] [CrossRef]
- Nick, W.; Asamene, K.; Bullock, G.; Esterline, A.; Sundaresan, M. A Study of Machine Learning Techniques for Detecting and Classifying Structural Damage. Int. J. Mach. Learn. Comput. 2015, 5, 313–318. [Google Scholar] [CrossRef] [Green Version]
- Addin, O.; Sapuan, S.M.; Mahdi, E.; Othman, M. A Naïve-Bayes classifier for damage detection in engineering materials. Mater. Des. 2007, 28, 2379–2386. [Google Scholar] [CrossRef]
- Vitola, J.; Pozo, F.; Tibaduiza, D.A.; Anaya, M. Distributed Piezoelectric Sensor System for Damage Identification in Structures Subjected to Temperature Changes. Sensors 2017, 17, 1252. [Google Scholar] [CrossRef] [Green Version]
- Meixedo, A.; Santos, J.; Ribeiro, D.; Calçada, R.; Todd, M.D. Online unsupervised detection of structural changes using train–induced dynamic responses. Mech. Syst. Signal Process. 2022, 165, 108268. [Google Scholar] [CrossRef]
- Yang, M.; Makis, V. ARX model-based gearbox fault detection and localization under varying load conditions. J. Sound Vib. 2010, 329, 5209–5221. [Google Scholar] [CrossRef]
- Figueiredo, E.; Park, G.; Farrar, C.R.; Worden, K.; Figueiras, J. Machine learning algorithms for damage detection under operational and environmental variability. Struct. Health Monit. 2011, 10, 559–572. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Y.; Zheng, H. Angle Domain Average and CWT for Fault Detection of Gear Crack. In Proceedings of the 2008 Fifth International Conference on Fuzzy Systems and Knowledge Discovery, Jinan, China, 18–20 October 2008. [Google Scholar]
- Addison, P.S. Introduction to redundancy rules: The continuous wavelet transform comes of age. Philosophical Transactions of the Royal Society A: Mathematical. Phys. Eng. Sci. 2018, 376, 20170258. [Google Scholar]
- Ribeiro, D.; Leite, J.; Meixedo, A.; Pinto, N.; Calçada, R.; Todd, M. Statistical methodologies for removing the operational effects from the dynamic responses of a high-rise telecommunications tower. Struct. Control. Health Monit. 2021, 28, e2700. [Google Scholar] [CrossRef]
- Bro, R.; Smilde, A.K. Principal component analysis. Anal. Methods 2014, 6, 2812–2831. [Google Scholar] [CrossRef] [Green Version]
- Härdle, W.; Simar, L. Applied Multivariate Statistical Analysis, 4th ed.; Springer: Manhattan, NY, USA, 2015. [Google Scholar]
- Jolliffe, I.T. Principal Component Analysis; Springer New York: Manhattan, NY, USA, 2002. [Google Scholar]
- Verma, N.K.; Gupta, V.K.; Sharma, M.; Sevakula, R.K. Intelligent condition based monitoring of rotating machines using sparse auto-encoders. In Proceedings of the 2013 IEEE Conference on Prognostics and Health Management (PHM), Gaithersburg, MD, USA, 24–27 June 2013. [Google Scholar]
- Bull, L.A.; Worden, K.; Fuentes, R.; Manson, G.; Cross, E.J.; Dervilis, N. Outlier ensembles: A robust method for damage detection and unsupervised feature extraction from high-dimensional data. J. Sound Vib. 2019, 453, 126–150. [Google Scholar] [CrossRef] [Green Version]
- UIC. Code of Practice for the Loading and Securing of Goods on Railway Wagons; UIC: Paris, France, 2022. [Google Scholar]
- ANSYS®. Academic Research; ANSYS®: Canonsburg, PA, USA, 2018. [Google Scholar]
- Bragança, C.; Neto, J.; Pinto, N.; Montenegro, P.A.; Ribeiro, D.; Carvalho, H.; Calçada, R. Calibration and validation of a freight wagon dynamic model in operating conditions based on limited experimental data. Veh. Syst. Dyn. 2022, 60, 3024–3050. [Google Scholar] [CrossRef]
- Montenegro, P.A.; Heleno, R.; Carvalho, H.; Calçada, R.; Baker, C.J. A comparative study on the running safety of trains subjected to crosswinds simulated with different wind models. J. Wind. Eng. Ind. Aerodyn. 2020, 207, 104398. [Google Scholar] [CrossRef]
- Vale, C.; Calçada, R. Dynamic Response of a Coupled Vehicle-Track System to Real Longitudinal Rail Profiles. In Proceedings of the Tenth International Conference on Computational Structures Technology, Valencia, Spain, 14–17 September 2010; Civil-Comp Press: Stirlingshire, UK, 2010. [Google Scholar]
- EN 13848-2; Railway Applications—Track—Track Geometry Quality—Part 2: Measuring Systems—Track Recording Vehicles. European Committee for Standardization: Brussels, Belgium, 2006.
- Mosleh, A.; Costa, P.A.; Calçada, R. A new strategy to estimate static loads for the dynamic weighing in motion of railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 183–200. [Google Scholar] [CrossRef]
- Peng, B. Mechanisms of Railway Wheel Polygonization. Ph.D. Thesis, University of Huddersfield, Huddersfield, UK, 2020. [Google Scholar]
- Johansson, A.; Andersson, C. Out-of-round railway wheels—A study of wheel polygonalization through simulation of three-dimensional wheel–rail interaction and wear. Veh. Syst. Dyn. 2005, 43, 539–559. [Google Scholar] [CrossRef]
- Cai, W.; Chi, M.; Tao, G.; Wu, X.; Wen, Z. Experimental and Numerical Investigation into Formation of Metro Wheel Polygonalization. Shock. Vib. 2019, 2019, 1538273. [Google Scholar] [CrossRef] [Green Version]
- Montenegro, P.A.; Neves, S.G.; Calçada, R.; Tanabe, M.; Sogabe, M. Wheel–rail contact formulation for analyzing the lateral train–structure dynamic interaction. Comput. Struct. 2015, 152, 200–214. [Google Scholar] [CrossRef]
- Mosleh, A.; Montenegro, P.A.; Costa, P.A.; Calçada, R. Railway Vehicle Wheel Flat Detection with Multiple Records Using Spectral Kurtosis Analysis. Appl. Sci. 2021, 11, 4002. [Google Scholar] [CrossRef]
- MATLAB®. Release R2018a; The MathWorks Inc.: Natick, MA, USA, 2018. [Google Scholar]
- Mosleh, A.; Montenegro, P.; Alves Costa, P.; Calçada, R. An approach for wheel flat detection of railway train wheels using envelope spectrum analysis. Struct. Infrastruct. Eng. 2020, 17, 1710–1729. [Google Scholar] [CrossRef]
- Mosleh, A.; Montenegro, P.A.; Costa, P.A.; Calçada, R. Approaches for weigh-in-motion and wheel defect detection of railway vehicles. In Rail Infrastructure Resilience; Woodhead Publishing: Cambridge, UK, 2022; pp. 183–207. [Google Scholar]
- Tomé, E.S.; Pimentel, M.; Figueiras, J. Damage detection under environmental and operational effects using cointegration analysis—Application to experimental data from a cable-stayed bridge. Mech. Syst. Signal Process. 2020, 135, 106386. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol (Unit) | Adopted Value |
|---|---|---|
| Carbody | ||
| Mass | 41.1 | |
| Roll moment of inertia | 49 | |
| Pitch moment of inertia | 673 | |
| Yaw moment of inertia | 665 | |
| Length | 10,000 | |
| Wheelset | ||
| Mass | 1247 | |
| Roll moment of inertia | 312 | |
| Yaw moment of inertia | 312 | |
| Suspensions | ||
| Longitudinal stiffness | 44,981 | |
| Lateral stiffness | 30,948 | |
| Vertical stiffness | 1860 | |
| Vertical damping | 16.7 |
| Parameter | Symbol (Unit) | Value |
|---|---|---|
| Rail | ||
| 7850 | ||
| Rail pad, longitudinal | ||
| Rail pad, lateral | ||
| Rail pad, vertical | ||
| Sleeper | 2590 | |
| Ballast, longitudinal | ||
| Ballast, lateral | ||
| Ballast, vertical | ||
| Foundation, longitudinal | ||
| Foundation, lateral | ||
| Foundation, vertical |
| Undamaged Scenarios/Healthy Wheel | Damaged Scenarios | ||
|---|---|---|---|
| Perfect Wheel | Initial Polygonal Wheel | Polygonization Wheel | |
| Vehicle | five freight wagons of the Laagrss type | ||
| Number of loading schemes | 6 | 1 (full load) | 1 (full load) |
| Unevenness profile | 4 | 1 | 1 |
| Speed range | 40–120 km/h | 80 km/h | 80 km/h |
| Noise ratio | 5% | 5% | 5% |
| Location of defect | 1st wagon 3rd wagon 5th wagon | 1st wagon | |
| Amplitude of defect (W) | - | 0.035 mm | 0.2–0.6 mm 0.8–1.2 mm |
| Total analyses | 113 | 30 | 30 |
| Location | Number of Sensors | False Positives | False Negatives |
|---|---|---|---|
| Rail | 8 (4 each sides) | 0/143 = 0% | 0/30 = 0% |
| 6 (3 each sides) | 0/143 = 0% | 0/30 = 0% | |
| 4 (2 each sides) | 1/143 = 0.7% | 0/30 = 0% | |
| 2 (1 each sides) | 0/143 = 0% | 0/30 = 0% | |
| Sleepers | 8 (4 each sides) | 0/143 = 0% | 0/30 = 0% |
| 6 (3 each sides) | 0/143 = 0% | 0/30 = 0% | |
| 4 (2 each sides) | 1/143 = 0.7% | 0/30 = 0% | |
| 2 (1 each sides) | 1/143 = 0.7% | 0/30 = 0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guedes, A.; Silva, R.; Ribeiro, D.; Vale, C.; Mosleh, A.; Montenegro, P.; Meixedo, A. Detection of Wheel Polygonization Based on Wayside Monitoring and Artificial Intelligence. Sensors 2023, 23, 2188. https://doi.org/10.3390/s23042188
Guedes A, Silva R, Ribeiro D, Vale C, Mosleh A, Montenegro P, Meixedo A. Detection of Wheel Polygonization Based on Wayside Monitoring and Artificial Intelligence. Sensors. 2023; 23(4):2188. https://doi.org/10.3390/s23042188
Chicago/Turabian StyleGuedes, António, Ruben Silva, Diogo Ribeiro, Cecília Vale, Araliya Mosleh, Pedro Montenegro, and Andreia Meixedo. 2023. "Detection of Wheel Polygonization Based on Wayside Monitoring and Artificial Intelligence" Sensors 23, no. 4: 2188. https://doi.org/10.3390/s23042188