

Laboratory Radiometric Calibration Technique of an Imaging System with Pixel-Level Adaptive Gain

Abstract
:1. Introduction
1.1. The Necessity to Expand Dynamic Range
1.2. Limitations on Extending Dynamic Range
1.3. The Advantage of Pixel-Level Adaptive Gain and Difficulties Encountered in Radiometric Calibration
2. Pixel-Level Adaptive-Gain Imaging System and Its Laboratory Radiometric Calibration System
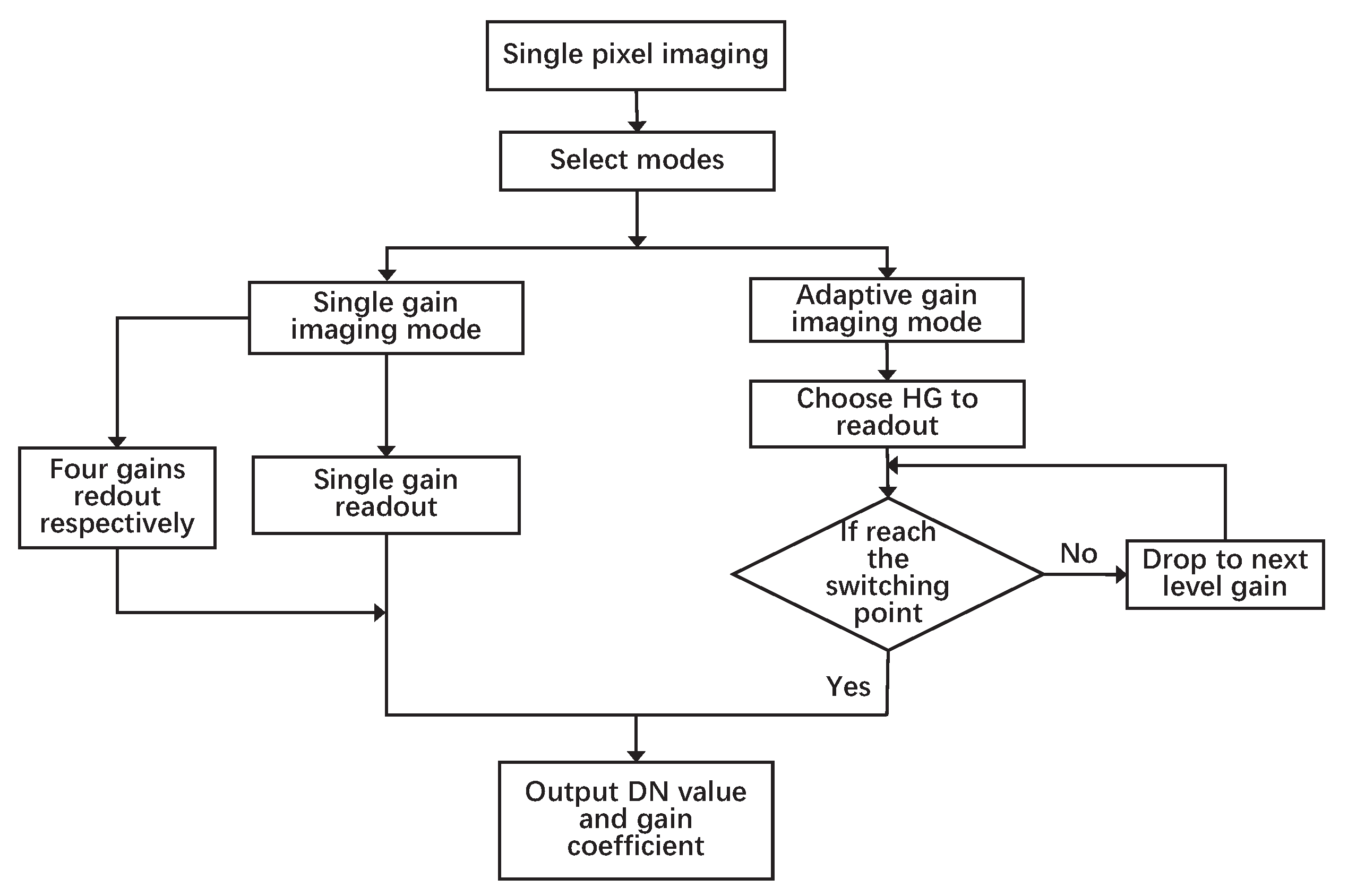
2.1. Introduction of Pixel-Level Adaptive-Gain Imaging System
2.2. Analysis of Laboratory Radiation Calibration Requirements
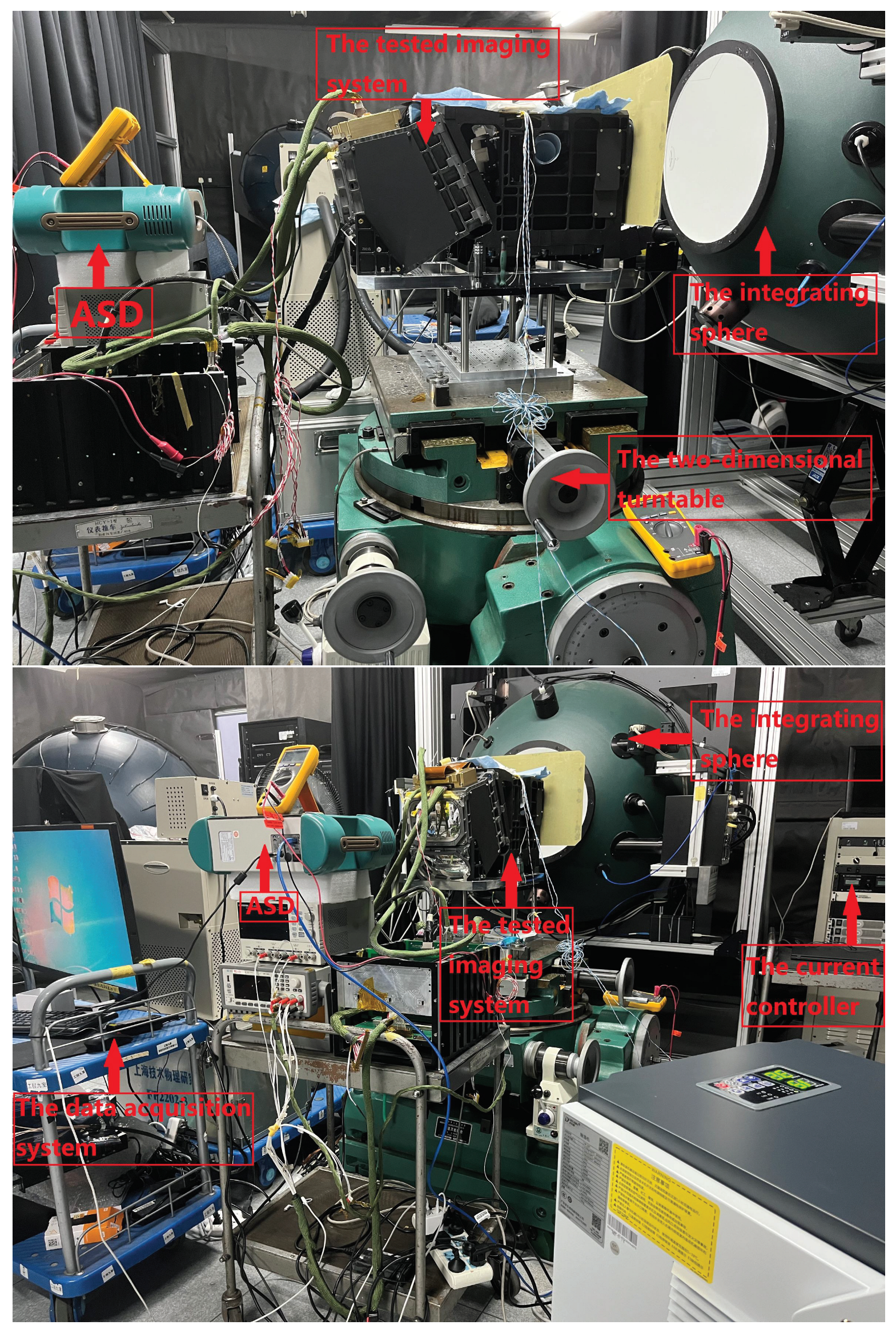
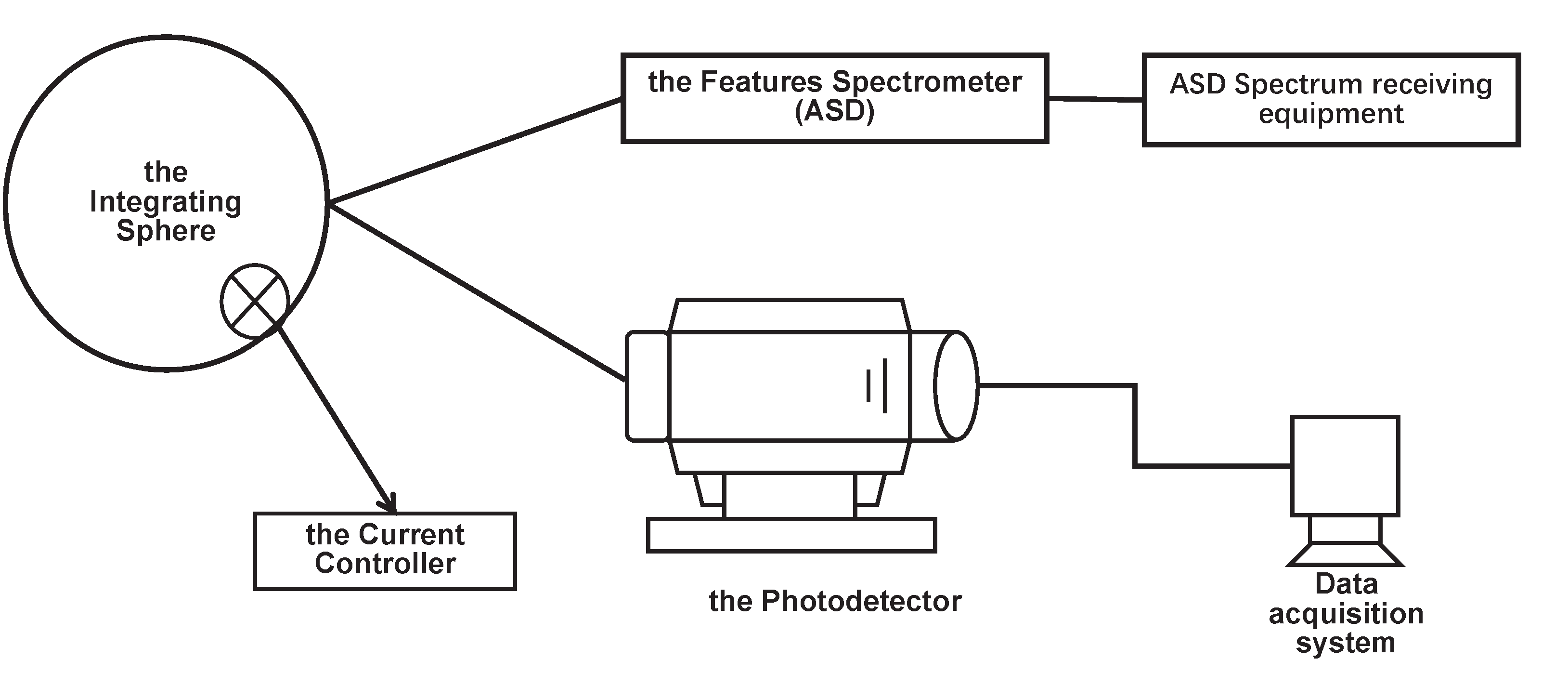
2.3. Design of Laboratory Radiation Calibration System
3. Laboratory Radiation Calibration Process Details and Results
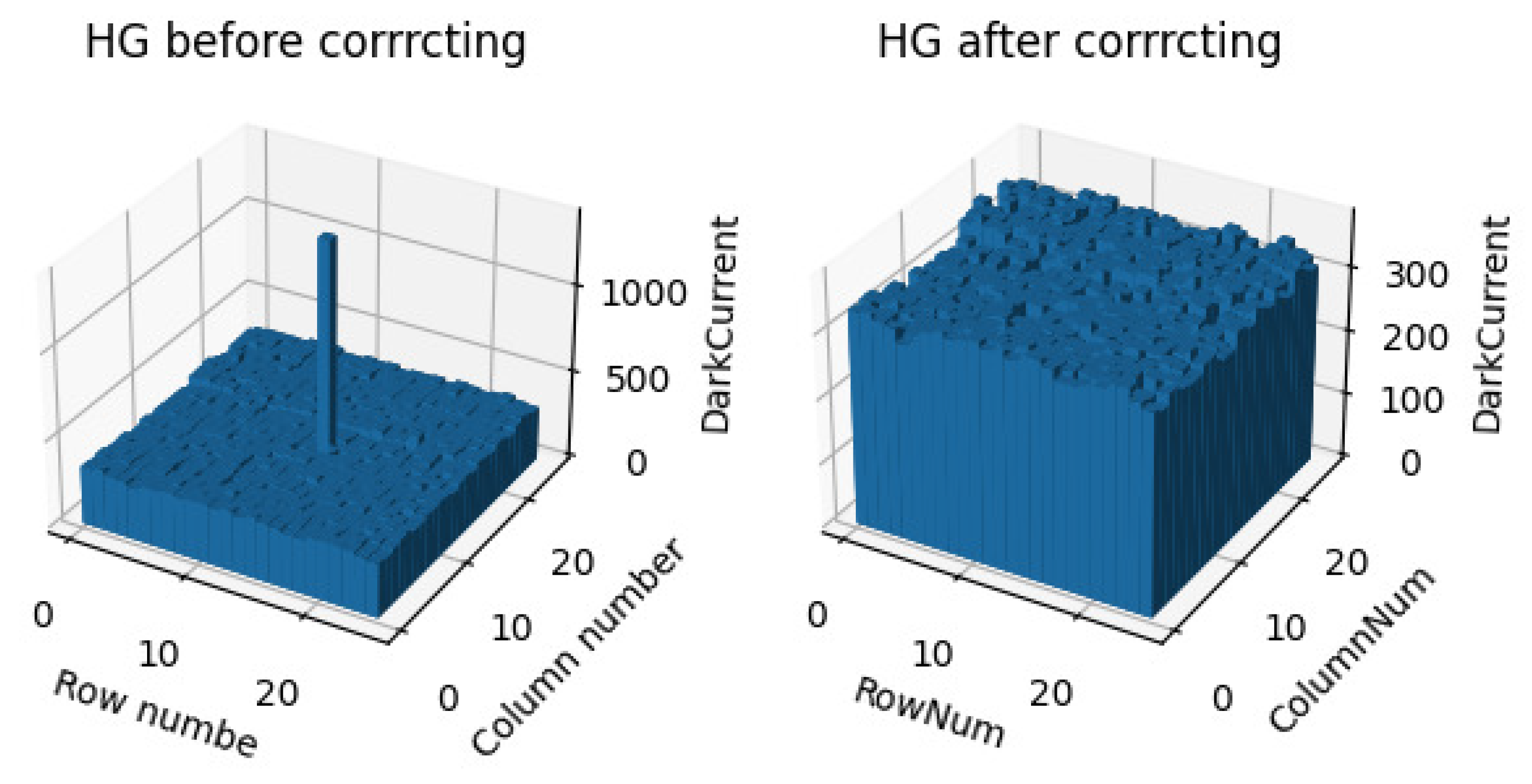
3.1. Dark-Current Determination
3.2. Determination of the Linear Dynamic Range of Four Gains
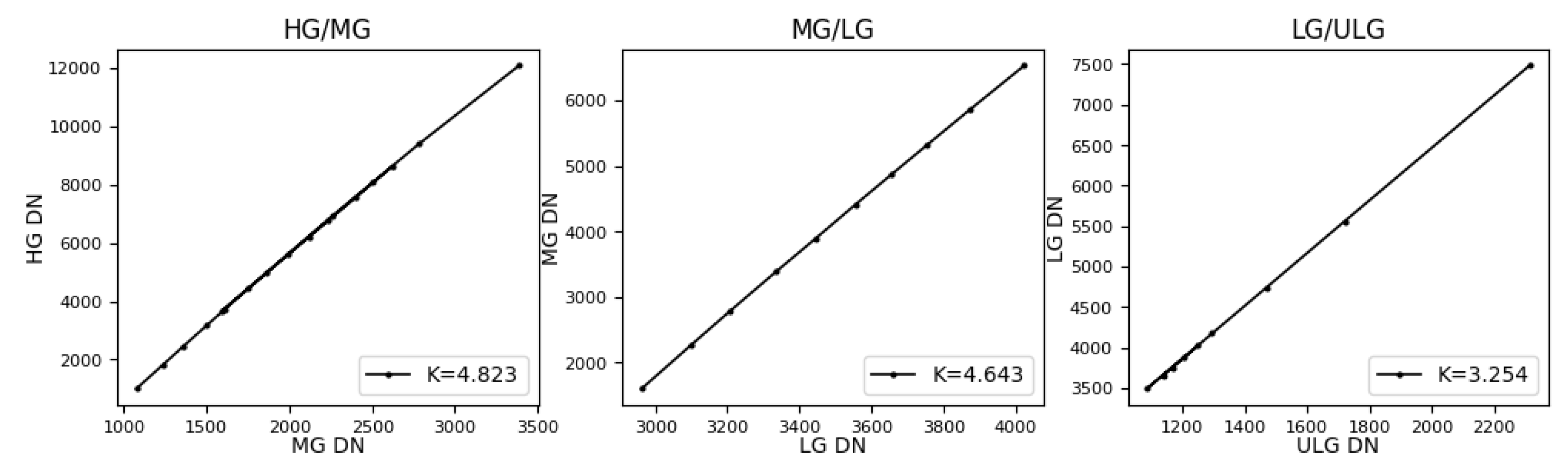
3.3. Measurement of Proportional Coefficient between Adjacent Gains
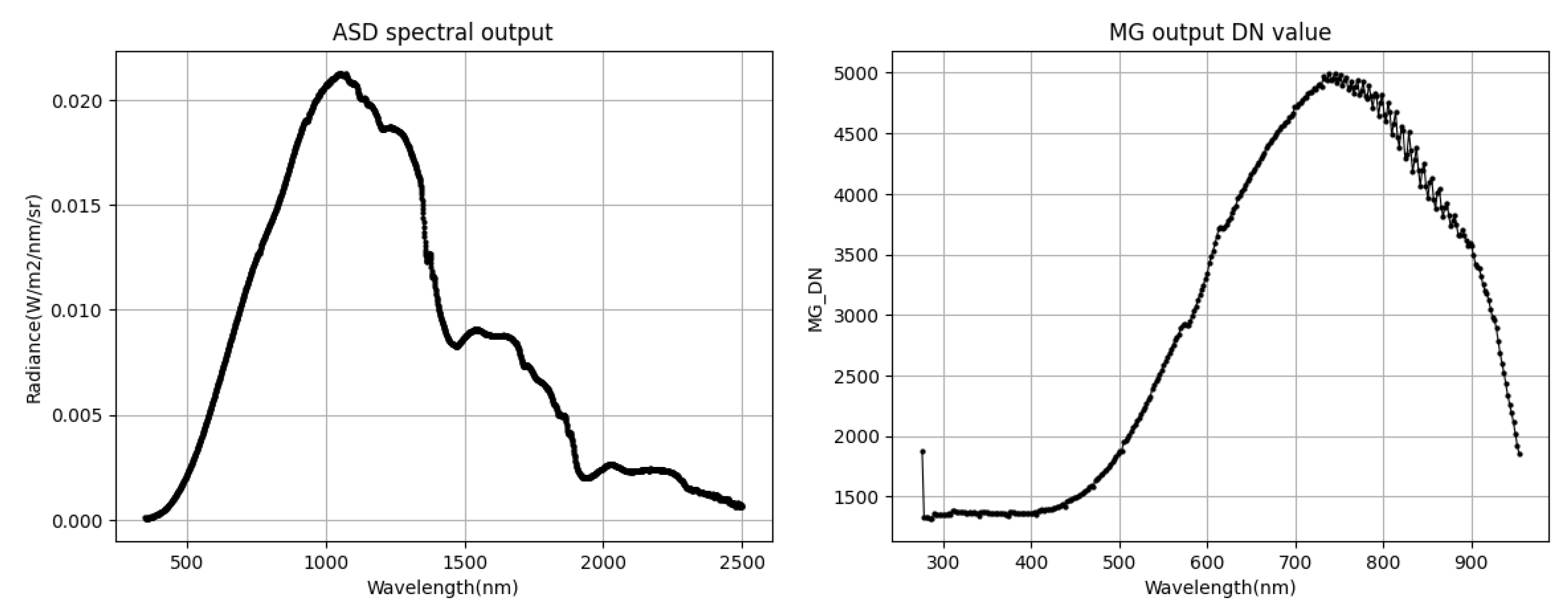
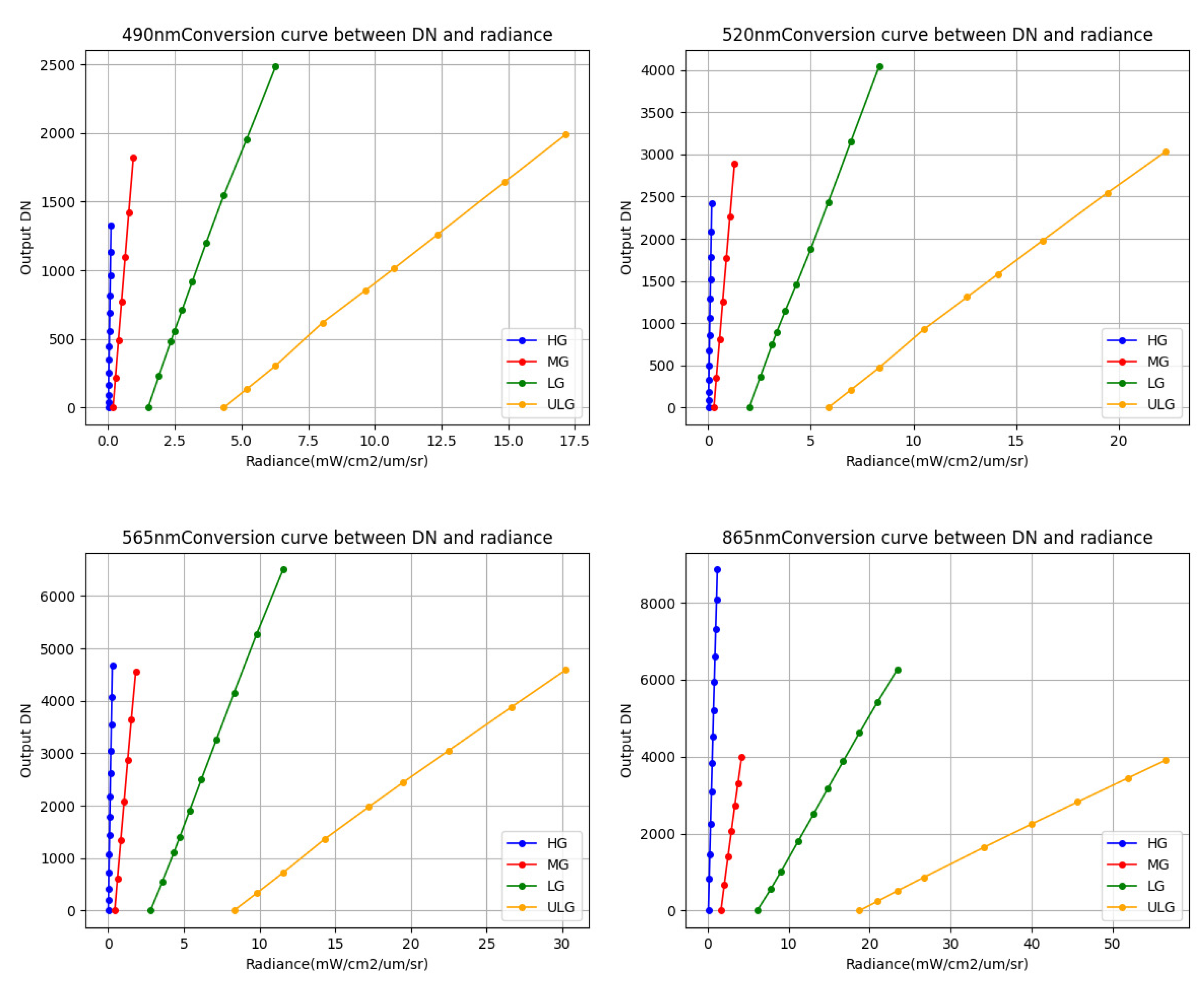
3.4. Determination of Absolute Radiometric Calibration Coefficient
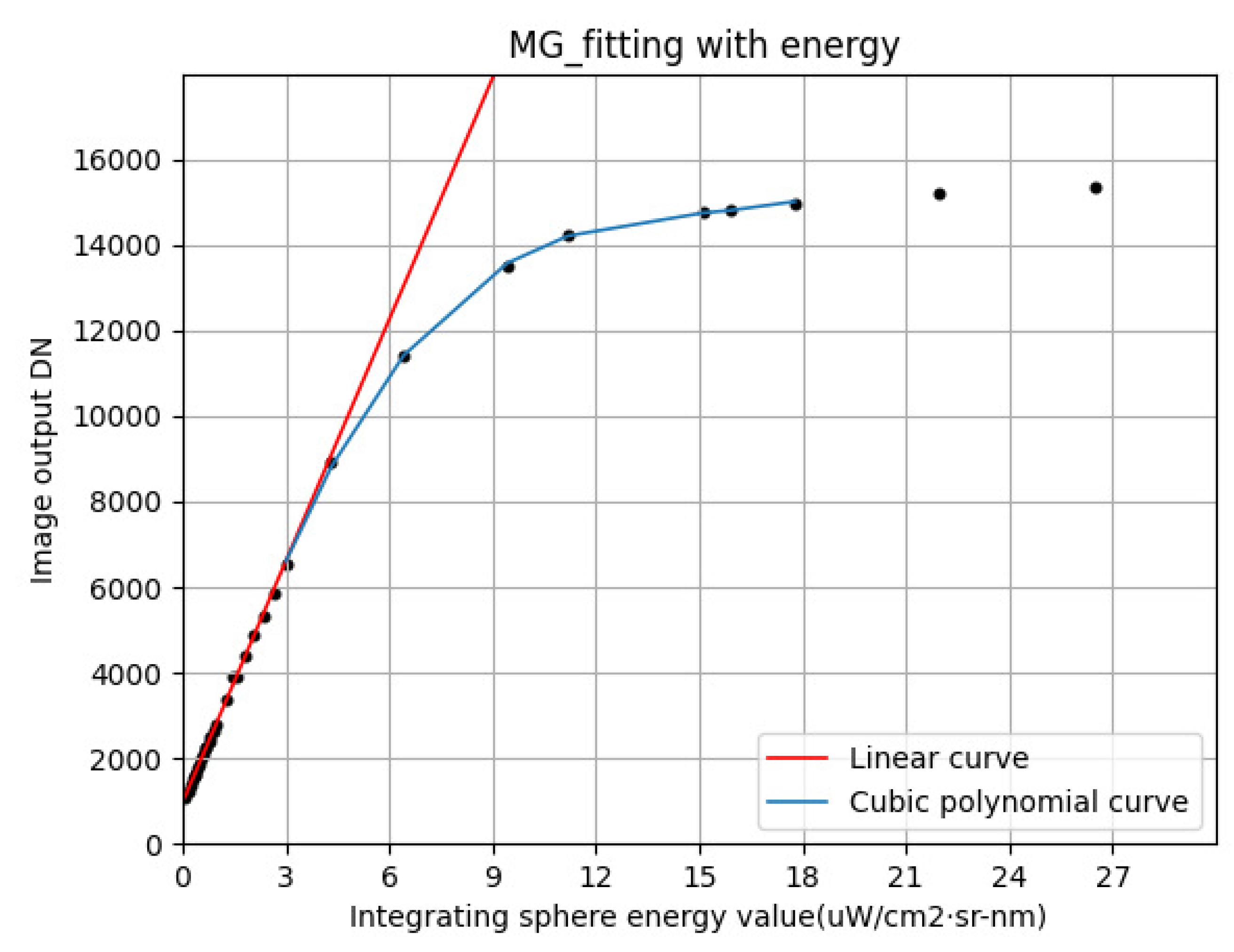
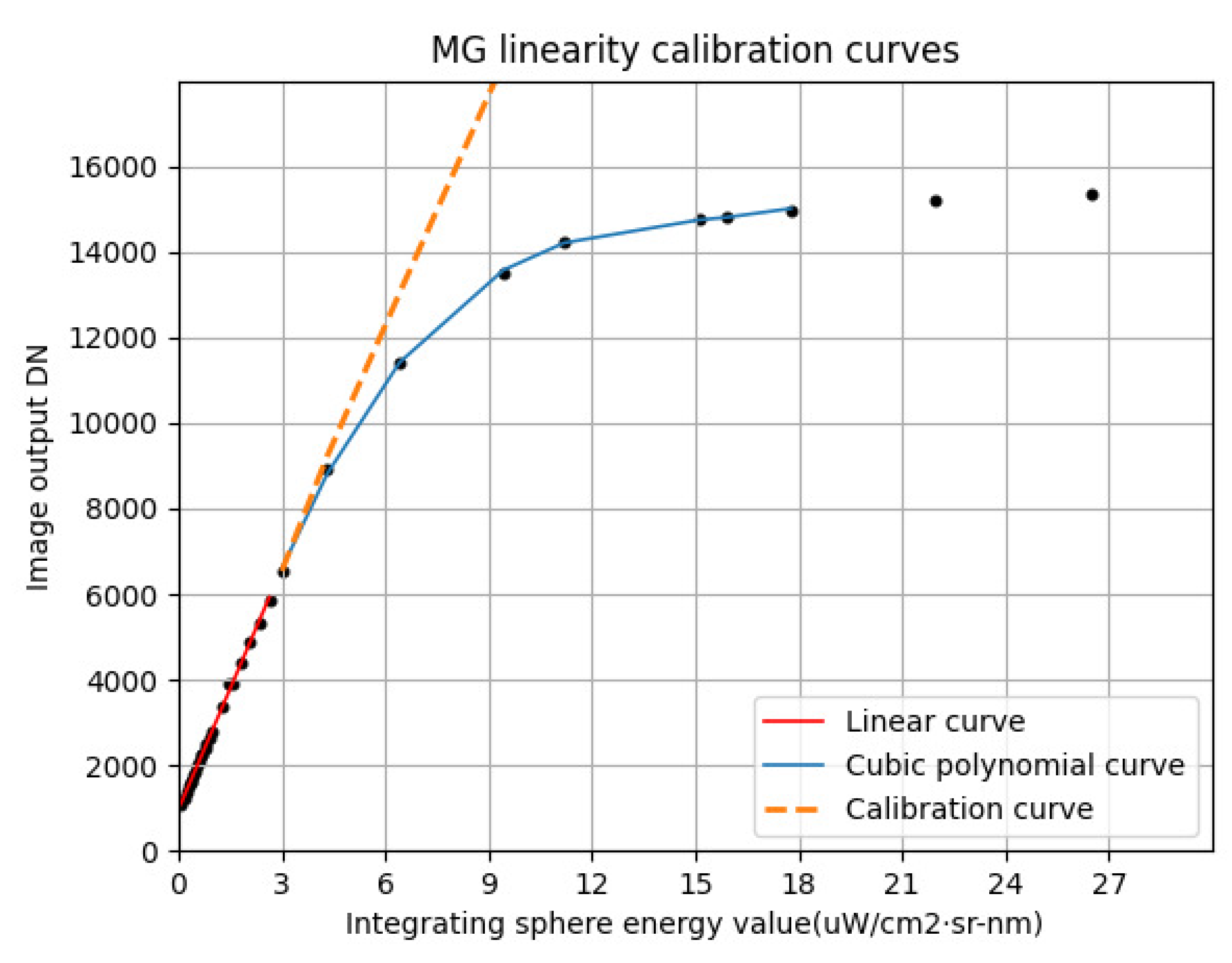
3.5. Single-Gain Nonlinear Correction
4. Conclusions
- The dark current of the photodetector is measured and the bad pixels that have process problems are corrected.
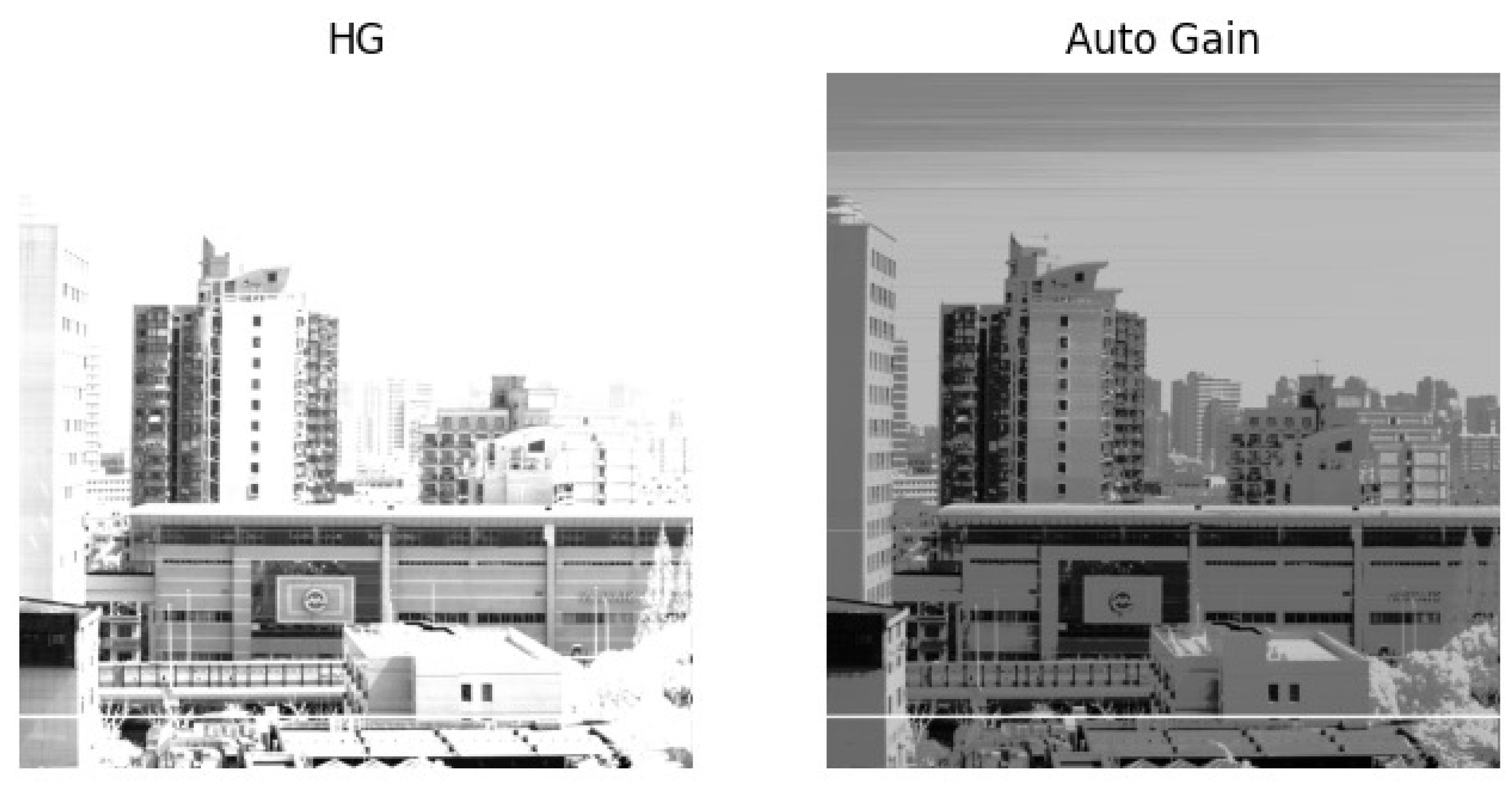
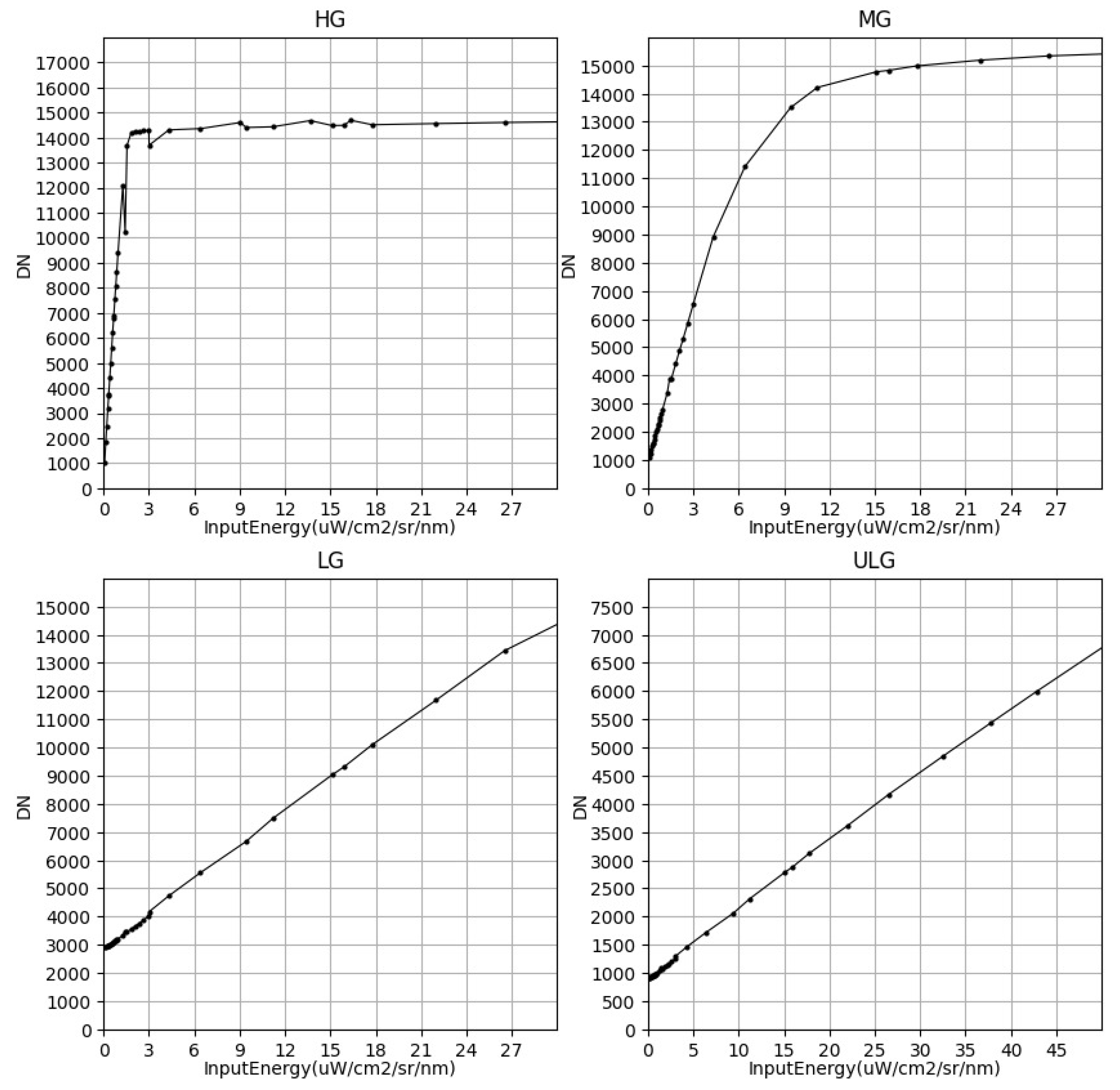
- In pixel-level adaptive-gain imaging mode, the linear dynamic range of the four gains is measured and used as the switching standard to form the overall linear dynamic range of the system.
- The proportional relationship between adjacent gains is obtained within the linear range of each gain to facilitate normalized image processing after adaptive-gain imaging.
- A laboratory stable integrating sphere is used to measure the absolute radiometric calibration coefficient and calibration offset of the four gains, and the ASD is used to measure the radiance of the integrating sphere as a reference for calibration to establish the quantitative relationship between the radiance and the observation value of the imaging system.
- In some scenes, the single-gain imaging mode of an imaging system is used, so this paper corrected the nonlinear region of MG, the gain with the largest nonlinear error, to prevent the nonlinear error from affecting the imaging.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Land, P.E.; Shutler, J.D.; Smyth, T.J. Correction of Sensor Saturation Effects in MODIS Oceanic Particulate Inorganic Carbon. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1466–1474. [Google Scholar] [CrossRef]
- Werdell, P.J.; Behrenfeld, M.J.; Bontempi, P.S.; Boss, E.; Remer, L.A. The Plankton, Aerosol, Cloud, ocean Ecosystem (PACE) mission: Status, science, advances. Bull. Am. Meteorol. Soc. 2019, 100, 1775–1794. [Google Scholar] [CrossRef]
- Petro, S.; Pham, K.; Hilton, G. Plankton, Aerosol, Cloud, ocean Ecosystem (PACE) Mission Integration and Testing. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar]
- McClain, C.R.; Franz, B.A.; Werdell, P.J. Genesis and Evolution of NASA’s Satellite Ocean Color Program. Front. Remote Sens. 2022, 3, 67. [Google Scholar] [CrossRef]
- Chen, G.; Yang, J.; Zhang, B.; Ma, C. Thoughts and Prospects on the new generation of marine science satellites. Period. Ocean. Univ. China 2019, 49, 110–117. [Google Scholar]
- Mouroulis, P.; Green, R.O.; Wilson, D.W. Optical design of a coastal ocean imaging spectrometer. Opt. Express 2008, 16, 9087–9096. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Gao, J.; Wang, J.; Zheng, Y.; Wang, J.; Xie, J. Study of dynamic infrared scene projection technology based on Digital Micro-mirror Device (DMD). In Proceedings of the Photonics Asia 2007, Beijing, China, 11–15 November 2007. [Google Scholar]
- Sun, W.; Han, C.H.S.H.; Lv, H.; Xue, X.; Hu, C. Dynamic range extending method for push-broom multispectral remote sensing cameras. Chin. Opt. 2019, 12, 906–913. [Google Scholar]
- Guo, L.; Yi, H. Research on multi-sensor high dynamic range imaging technology and application. In Proceedings of the First Optics Frontier Conference, 2021, Hangzhou, China, 18 June 2021; 2021. [Google Scholar]
- Mcclain, C.R.; Feldman, G.C.; Hooker, S.B. An overview of the SeaWiFS project and strategies for producing a climate research quality global ocean bio-optical time series. Deep Sea Res. Part Ii Top. Stud. Oceanogr. 2004, 51, 5–42. [Google Scholar] [CrossRef]
- Mills, S.; Jacobson, E.J.; Jaroń, J.; McCarthy, J.; Ohnuki, T.; Plonski, M.; Searcy, D.M.; Weiss, S.C. Calibration of the Viirs Day/Night Band (DNB). 2010. Available online: https://www.researchgate.net/publication/242595212_Calibration_of_the_VIIRS_daynight_band_DNB (accessed on 10 December 2022).
- Wolfe, R.E.; Lin, G.G.; Nishihama, M.; Tewari, K.P.; Tilton, J.C.; Isaacman, A.R. Suomi NPP VIIRS prelaunch and on-orbit geometric calibration and characterization. J. Geophys. Res. Atmos. 2013, 118, 11508–11521. [Google Scholar] [CrossRef]
- Chen, H.; Xiong, X.; Sun, C.; Chen, X.; Chiang, K. Suomi-NPP VIIRS day–night band on-orbit calibration and performance. J. Appl. Remote Sens. 2015, 11, 036019. [Google Scholar] [CrossRef]
- Li, L.; Zhang, G.; Jiang, Y.; Shen, X. An Improved On-Orbit Relative Radiometric Calibration Method for Agile High-Resolution Optical Remote-Sensing Satellites With Sensor Geometric Distortion. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5606715. [Google Scholar] [CrossRef]
- Pawar, M.; Panwar, H.P.S.; Sahay, A.K. Absolute Radiometric Calibration of VNIR Hyperspectral Imaging Payload. In Advances in Small Satellite Technologies; Sastry, P.S., Jiji, C.V., Raghavamurthy, D., Rao, S.S., Eds.; Lecture Notes in Mechanical Engineering; Springer: Singapore, 2020. [Google Scholar]
- Yu, X.; Sun, Y.; Fang, A.; Qi, W.; Liu, C. Laboratory spectral calibration and radiometric calibration of hyper-spectral imaging spectrometer. In Proceedings of the 2014 2nd International Conference on Systems and Informatics (ICSAI 2014), Shanghai, China, 15–17 November 2014; pp. 871–875. [Google Scholar] [CrossRef]
- McGrath, D.; Stephen, P. Tobin and Vincent Goiffon and Pierre Magnan and Alexandre Le Roch.Dark Current Limiting Mechanisms in CMOS Image Sensors. Electron. Imaging 2018, 2018, 354-1–354-8. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gain Level | Average Dark Current DN |
|---|---|
| HG | 335.58 |
| MG | 1281.51 |
| LG | 1179.44 |
| ULG | 1183.30 |
| Gain Level | Switching Point DN | Linear Region |
|---|---|---|
| HG | 14,186 | 336∼14,186 |
| MG | 11,413 | 1282∼11,413 |
| LG | 13,254 | 1180∼13,254 |
| ULG | Nought | 1184∼13,411 |
| Adjacent Gains | Conversion Slope | Conversion Offset |
|---|---|---|
| HG/MG | 4.82 | −128.68 |
| MG/LG | 4.64 | 436.17 |
| LG/ULG | 3.25 | −152.71 |
| Central Wavelength | Gain Level | Calibration Slope | Calibration Offset | Correlation Coefficient |
|---|---|---|---|---|
| 490 nm | HG | 0.000080 | −0.025551 | 0.9998 |
| MG | 0.000416 | −0.563583 | 0.9999 | |
| LG | 0.001922 | −2.573559 | 0.9995 | |
| ULG | 0.006441 | −8.027152 | 0.9997 | |
| 520 nm | HG | 0.000066 | −0.021217 | 0.9998 |
| MG | 0.000347 | −0.477446 | 0.9999 | |
| LG | 0.001582 | −2.158486 | 0.9998 | |
| ULG | 0.005402 | −6.947947 | 0.9997 | |
| 565 nm | HG | 0.000057 | −0.019258 | 0.9999 |
| MG | 0.000302 | −0.435559 | 0.9998 | |
| LG | 0.001332 | −1.797282 | 0.9999 | |
| ULG | 0.004765 | −6.713449 | 0.9996 | |
| 865 nm | HG | 0.000124 | −0.055145 | 0.9998 |
| MG | 0.000638 | −0.959038 | 0.9999 | |
| LG | 0.002724 | −3.587031 | 0.9999 | |
| ULG | 0.009654 | −13.074396 | 0.9999 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wei, J.; Huang, X.; Xu, F. Laboratory Radiometric Calibration Technique of an Imaging System with Pixel-Level Adaptive Gain. Sensors 2023, 23, 2083. https://doi.org/10.3390/s23042083
Li Z, Wei J, Huang X, Xu F. Laboratory Radiometric Calibration Technique of an Imaging System with Pixel-Level Adaptive Gain. Sensors. 2023; 23(4):2083. https://doi.org/10.3390/s23042083
Chicago/Turabian StyleLi, Ze, Jun Wei, Xiaoxian Huang, and Feifei Xu. 2023. "Laboratory Radiometric Calibration Technique of an Imaging System with Pixel-Level Adaptive Gain" Sensors 23, no. 4: 2083. https://doi.org/10.3390/s23042083