
High-Spatial-Resolution NDVI Reconstruction with GA-ANN

Abstract
:1. Introduction
2. Study Area and Dataset Preprocessing
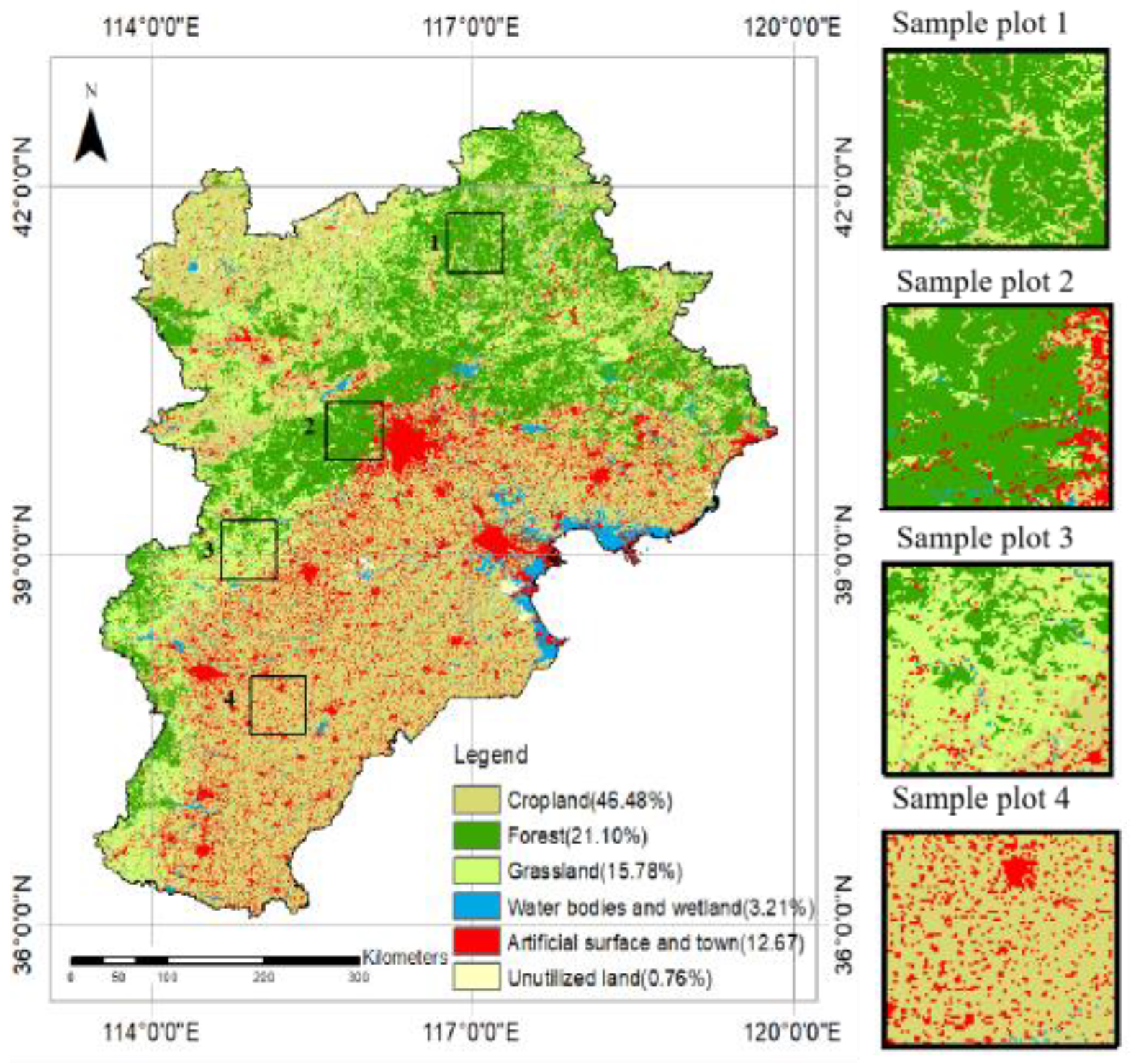
2.1. Study Area
2.2. Dataset and Data Preprocessing
3. Methodology
3.1. NDVI Calculation
3.2. Reconstructing NDVI Model Based on GA-ANN Algorithm
3.3. The Other Existing Reconstruction Models
3.4. Accuracy Assessment
4. Results
4.1. Performance of Reconstructed NDVI Model
4.1.1. The Self-Validation of Reconstructed NDVI Model
4.1.2. Evaluation of Reconstructed NDVI Model
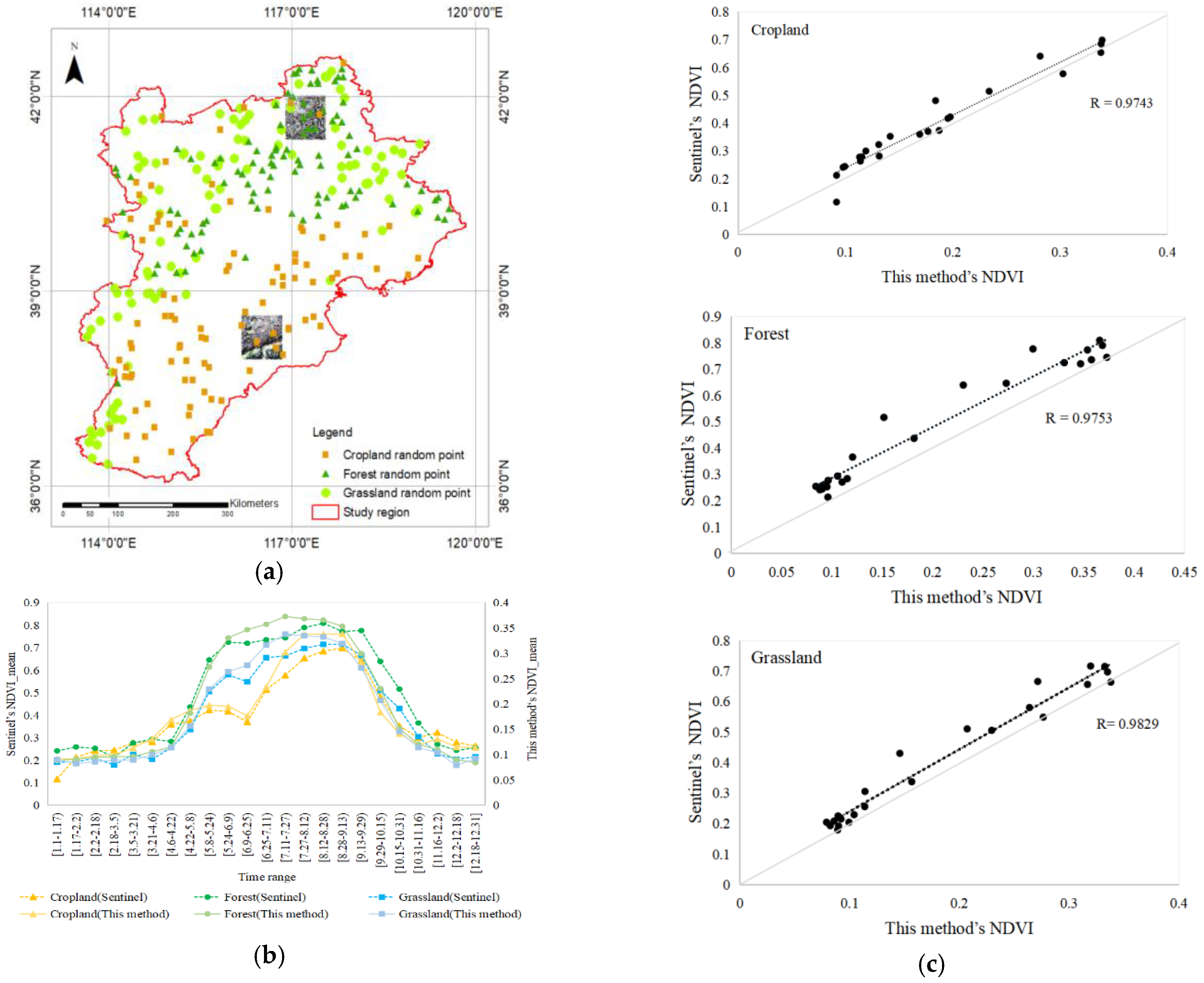
4.1.3. Verification with Sentinel Data
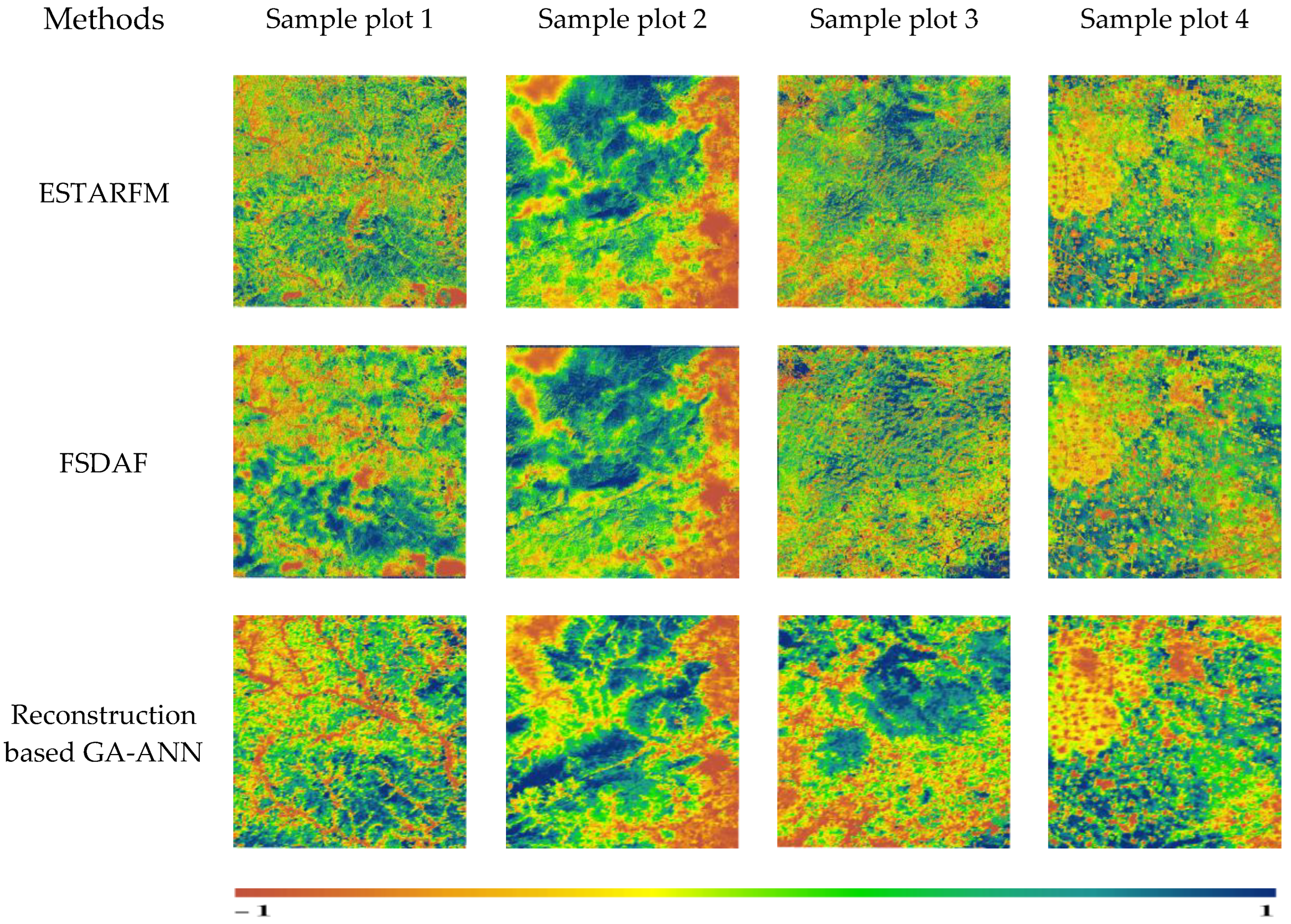
4.2. Comparison with Existing Methods
5. Analysis and Discussion
5.1. Spatiotemporal Analysis of the High-Spatial-Resolution NDVI Product
5.2. Uncertainty of Reconstructed NDVI Model Based on GA-ANN Algorithm
5.2.1. Influence of Selection of Random Points
5.2.2. Influence of Data Resampling
5.2.3. Influence of Land Use Data and Different Sensors and Bands Used by MODIS, Landsat, and Sentinel
5.3. Advantages of the Reconstructed NDVI Model Based on GA-ANN
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jiang, W.; Niu, Z.; Wang, L.; Ya, R.; Gui, X.; Xiang, F.; Ji, Y. Impacts of Drought and Climatic Factors on Vegetation Dynamics in the Yellow River Basin and Yangtze River Basin, China. Remote Sens. 2022, 14, 930. [Google Scholar] [CrossRef]
- Lunetta, R.S.; Knight, J.F.; Ediriwickrema, J.; Lyon, J.G.; Worthy, L.D. Land-cover change detection using multi-temporal MODIS NDVI data. Remote Sens. Environ. 2006, 105, 142–154. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.; Gao, X.; Ferreira, G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Jeong, S.; Ho, C.; Gim, H.; Brown, M. Phenology shifts at start vs. end of growing season in temperate vegetation over the Northern Hemisphere for the period 1982–2008. Glob. Chang. Biol. 2011, 17, 2385–2399. [Google Scholar] [CrossRef]
- Pettorelli, N.; Vik, J.; Mysterud, A.; Gaillard, J.; Tucker, C.; Stenseth, N. Using the satellite-derived NDVI to assess ecological responses to environmental change. Trends Ecol. Evol. 2005, 20, 503–510. [Google Scholar] [CrossRef]
- Chen, J.; Chen, S.; Fu, R.; Wang, C.; Li, D.; Peng, Y.; Wang, L.; Jiang, H.; Zheng, Q. Remote Sensing Estimation of Chlorophyll-A in Case-II Waters of Coastal Areas: Three-Band Model Versus Genetic Algorithm-Artificial Neural Networks Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3640–3658. [Google Scholar] [CrossRef]
- Bai, J.; Ding, B.; Xiao, Z.; Jiao, L.; Chen, H.; Regan, A. Hyperspectral Image Classification Based on Deep Attention Graph Convolutional Network. IEEE Transations Geosci. Remote Sens. 2022, 60, 5504316. [Google Scholar] [CrossRef]
- Shang, R.; Zhu, Z.; Zhang, J.; Qiu, S.; Yang, Z.; Li, T.; Yang, X. Near-real-time monitoring of land disturbance with harmonized Landsats 7-8 and Sentinel-2 data. Remote Sens. Environ. 2022, 278, 113073. [Google Scholar] [CrossRef]
- Tulbure, M.; Broich, M.; Perin, V.; Gaines, M.; Ju, J.; Stheman, S.; Pavelsky, T.; Masek, J.; Yin, S.; Mai, J. Can we detect more ephemeral floods with higher density harmonized Landsat Sentinel 2 data compared to Landsat 8 alone? ISPRS J. Photogramm. Remote Sens. 2022, 185, 232–246. [Google Scholar] [CrossRef]
- Zhu, X.; Cai, F.; Tian, J.; Williams, T. Spatiotemporal Fusion of Multisource Remote Sensing Data: Literature Survey, Taxonomy, Principles, Applications, and Future Directions. Remote Sens. 2018, 10, 527. [Google Scholar] [CrossRef] [Green Version]
- Salcedo-Sanz, S.; Ghamisi, P.; Piles, M.; Werner, M.M.; Cuadra, L.; Moreno-Martinez, A.; Izquierdo-Verdiguier, E.; Munoz-Mari, J.; Mosavi, A.; Camps-Valls, G. Machine learning information fusion in Earth observation: A comprehensive review of methods, applications and data sources. Inf. Fusion 2020, 63, 256–272. [Google Scholar] [CrossRef]
- Weng, Q.; Fu, P.; Gao, F. Generating daily land surface temperature at Landsat resolution by fusing Landsat and MODIS data. Remote Sens. Environ. 2014, 145, 55–67. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.; Xie, D.; Yin, X.; Liu, C.; Liu, G. Application of Synthetic NDVI Time Series Blended from Landsat and MODIS Data for Grassland Biomass Estimation. Remote Sens. 2016, 8, 10. [Google Scholar] [CrossRef]
- Liu, M.; Liu, X.; Dong, X.; Zhao, B.; Zou, X.; Wu, L.; Wei, H. An Improved Spatiotemporal Data Fusion Method Using Surface Heterogeneity Information Based on ESTARFM. Remote Sens. 2020, 12, 3673. [Google Scholar] [CrossRef]
- Yang, J.; Yao, Y.; Wei, Y.; Zhang, Y.; Jia, K.; Zhang, X.; Shang, K.; Bei, X.; Guo, X. A Robust Method for Generating High-Spatiotemporal-Resolution Surface Reflectance by Fusing MODIS and Landsat Data. Remote Sens. 2020, 12, 2312. [Google Scholar] [CrossRef]
- Wu, M.; Niu, Z.; Wang, C.; Wu, C.; Wang, L. Use of MODIS and Landsat time series data to generate high-resolution temporal synthetic Landsat data using a spatial and temporal reflectance fusion model. J. Appl. Remote Sens. 2012, 6, 063507. [Google Scholar] [CrossRef]
- Ma, J.; Zhang, W.; Marinoni, A.; Gao, L.; Zhang, B. An Improved Spatial and Temporal Reflectance Unmixing Model to Synthesize Time Series of Landsat-Like Images. Remote Sens. 2018, 10, 1388. [Google Scholar] [CrossRef]
- Guo, D.; Shi, W.; Hao, M.; Zhu, X. FSDAF 2.0: Improving the performance of retrieving land cover changes and preserving spatial details. Remote. Sens. Environ. 2020, 248, 111973. [Google Scholar] [CrossRef]
- Al Kloub, R.S.A. Machine Learning Based Analysis of Real-Time Geographical of RS Spatio-Temporal Data. CMC-Comput. Mater. Contin. 2022, 71, 5151–5165. [Google Scholar] [CrossRef]
- Hou, S.; Sun, W.; Guo, B.; Li, C.; Li, X.; Shao, Y.; Zhang, J. Adaptive-SFSDAF for Spatiotemporal Image Fusion that Selectively Uses Class Abundance Change Information. Remote Sens. 2020, 12, 3979. [Google Scholar] [CrossRef]
- Ge, Y.; Li, Y.; Chen, J.; Sun, K.; Li, D.; Han, Q. A Learning-Enhanced Two-Pair Spatiotemporal Reflectance Fusion Model for GF-2 and GF-1 WFV Satellite Data. Sensors 2020, 2, 1789. [Google Scholar] [CrossRef]
- Li, D.; Li, Y.; Yang, W.; Ge, Y.; Han, Q.; Ma, L.; Chen, Y.; Li, X. An Enhanced Single-Pair Learning-Based Reflectance Fusion Algorithm with Spatiotemporally Extended Training Samples. Remote Sens. 2018, 10, 1207. [Google Scholar] [CrossRef]
- Wu, B.; Huang, B.; Zhang, L. An Error-Bound-Regularized Sparse Coding for Spatiotemporal Reflectance Fusion. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6791–6803. [Google Scholar] [CrossRef]
- Wen, X.; Liu, H.; Yan, G.; Sun, F. Weakly paired multimodal fusion using multilayer extreme learning machine. Soft Comput. 2018, 22, 3533–3544. [Google Scholar] [CrossRef]
- Li, S.; Xu, L.; Jing, Y.; Yin, H.; Li, X.; Guan, X. High-quality vegetation index product generation: A review of NDVI time series reconstruction techniques. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102640. [Google Scholar] [CrossRef]
- Li, X.; Shen, R.; Chen, R. Improving Time Series Reconstruction by Fixing Invalid Values and Its Fidelity Evaluation. IEEE Access 2020, 8, 7558–7572. [Google Scholar] [CrossRef]
- Qiu, S.; Zhu, Z.; Woodcock, C. Cirrus clouds that adversely affect Landsat 8 images: What are they and how to detect them? Remote Sens. Environ. 2020, 246, 111884. [Google Scholar] [CrossRef]
- Ke, Y.H.; Im, J.; Lee, J.; Gong, H.L.; Ryu, Y. Characteristics of Landsat 8 OLI-derived NDVI by comparison with multiple satellite sensors and in-situ observations. Remote Sens. Environ. 2015, 164, 298–313. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.W.; Schell, J.A. Monitoring the Vernal Advancement and Retrogradation (Greenwave Effect) of Natural Vegetation. NASA/GSFCT Type III Final Report. 1974. Available online: https://ntrs.nasa.gov/citations/19750020419 (accessed on 11 April 2022).
- Liao, L.M.; Song, J.L.; Wang, J.D.; Xiao, Z.Q.; Wang, J. Bayesian Method for Building Frequent Landsat-Like NDVI Datasets by Integrating MODIS and Landsat NDVI. Remote Sens. 2016, 8, 452. [Google Scholar] [CrossRef]
- Huang, M.; Liu, Z. Research on Mechanical Fault Prediction Method Based on Multifeature Fusion of Vibration Sensing Data. Sensors 2020, 20, 6. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Lei, L. A Hybrid Genetic Algorithm Based on Information Entropy and Game Theory. IEEE Access 2020, 8, 36602–36611. [Google Scholar] [CrossRef]
- Zaji, A.; Bonakdari, H.; Khameneh, H.; Khodashenas, S. Application of optimized Artificial and Radial Basis neural networks by using modified Genetic Algorithm on discharge coefficient prediction of modified labyrinth side weir with two and four cycles. Measurment 2020, 152, 107291. [Google Scholar] [CrossRef]
- Chen, Y.; Cao, R.; Chen, J.; Liu, L.; Matsushita, B. A practical approach to reconstruct high-quality Landsat NDVI time-series data by gap filling and the Savitzky-Golay filter. ISPRS J. Photogramm. Remote Sens. 2021, 180, 174–190. [Google Scholar] [CrossRef]
- Jiang, Y.; Tang, B.; Zhao, Y. Estimation of Downwelling Surface Longwave Radiation with the Combination of Parameterization and Artificial Neural Network from Remotely Sensed Data for Cloudy Sky Conditions. Remote Sens. 2022, 14, 11. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Zhu, X.; Helmer, E.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Cao, R.; Chen, Y.; Shen, M.S.; Chen, J.; Zhou, J.; Wang, C.; Yang, W. A simple method to improve the quality of NDVI time-series data by integrating spatiotemporal information with the Savitzky-Golay filter. Remote Sens. Environ. 2018, 217, 244–257. [Google Scholar] [CrossRef]
- Rao, Y.; Zhu, X.; Chen, J.; Wang, J. An Improved Method for Producing High Spatial-Resolution NDVI Time Series Datasets with Multi-Temporal MODIS NDVI Data and Landsat TM/ETM+ Images. Remote Sens. 2015, 7, 7865–7891. [Google Scholar] [CrossRef]
- Xu, L.; Li, B.; Yuan, Y.; Gao, X.; Zhang, T. A Temporal-Spatial Iteration Method to Reconstruct NDVI Time Series Datasets. Remote Sens. 2015, 7, 8906–8924. [Google Scholar] [CrossRef]
- Liu, X.; Ji, L.; Zhang, C.; Liu, Y. A method for reconstructing NDVI time-series based on envelope detection and the Savitzky-Golay filter. Int. J. Digit. Earth 2022, 15, 553–584. [Google Scholar] [CrossRef]
- Malamiri, H.; Zare, H.; Rousta, I.; Olafsson, H.; Verdiguier, E.; Zhang, H.; Mushore, T. Comparison of Harmonic Analysis of Time Series (HANTS) and Multi-Singular Spectrum Analysis (M-SSA) in Reconstruction of Long-Gap Missing Data in NDVI Time Series. Remote Sens. 2020, 12, 2747. [Google Scholar] [CrossRef]
- Tan, Z.; Gao, M.; Li, X.; Jiang, L. A Flexible Reference-Insensitive Spatiotemporal Fusion Model for Remote Sensing Images Using Conditional Generative Adversarial Network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5601413. [Google Scholar] [CrossRef]
- Wang, X.; Li, X.; Xiao, X.; Fan, L.; Zuo, L. Changes in the Water-Energy Coupling Relationship in Grain Production: A Case Study of the North China Plain. Int. J. Environ. Res. Public Health 2022, 19, 15. [Google Scholar] [CrossRef]
- Liao, P.; Chen, G.; Zhang, X.; Zhu, K.; Gong, Y.; Wang, T.; Li, X.; Yang, H. A linear pushbroom satellite image epipolar resampling method for digital surface model generation. ISPRS J. Photogramm. Remote Sens. 2022, 190, 56–68. [Google Scholar] [CrossRef]
- Yang, G.; Shen, H.; Zhang, L.; He, Z.; Li, X. A Moving Weighted Harmonic Analysis Method for Reconstructing High-Quality SPOT VEGETATION NDVI Time-Series Data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6008–6021. [Google Scholar] [CrossRef]
- Chu, D.; Shen, H.; Guan, X.; Chen, J.; Li, X.; Li, J.; Zhang, L. Long time-series NDVI reconstruction in cloud-prone regions via spatio-temporal tensor completion. Remote Sens. Environ. 2021, 264, 112632. [Google Scholar] [CrossRef]
- Emelyanova, I.V.; McVicar, T.R.; Van Niel, T.G.; Li, L.T.; van Dijk, A.I.J.M. Assessing the accuracy of blending Landsat–MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics: A framework for algorithm selection. Remote Sens. Environ. 2013, 133, 193–209. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Spatial Resolution | Temporal Resolution | Band | Time Range |
|---|---|---|---|---|
| MOD13Q1 | 250 m | 16 d | NDVI | 2018-01-01–2020.12.31 |
| Landsat 8 L2 | 30 m | 16 d | SR_B4 (RED) SR_B5 (NIR) | 2018-01-01–2020.12.31 |
| Sentinel-2 L2 | 10 m | 5 d | B4 (RED) B8 (NIR) | |
| Reconstructed NDVI | 30 m | 16 d |
| Landsat 8 L2 | Sentinel-2 L2 | ||||
|---|---|---|---|---|---|
| Band | Bandwidth (nm) | NDVI Formula | Band | Bandwidth (nm) | NDVI Formula |
| 4 | 636–673 | 4 | 664.5 nm (S2A)/665 nm (S2B) | ||
| 5 | 851–879 | 8 | 835.1 nm (S2A)/833 nm (S2B) | ||
| Model Parameter | Type/Value | Model Parameter | Type/Value |
|---|---|---|---|
| Population size | 10 | Elite count | 9 |
| Population type | Double vector | Migration direction | Forward |
| Population initial range | 16 × 2 double | Migration interval | 11 |
| Selection mechanism | Roulette wheel | Time limit | Infinite |
| Basis of chromosome selection | Fitness function | Stall generation limit | Infinite |
| Crossover type | Double | Maximum number of generations | 50 |
| Crossover probability | 0.4 | Termination criteria | 0.00001 |
| Mutation type | Gaussian | Display | Iteration |
| Mutation probability | 0.2 |
| Site | RMSE | MAE | PSNR | SSIM |
|---|---|---|---|---|
| Sample plot 1 | 0.0199 | 0.0331 | 15.9963 | 0.7838 |
| Sample plot 2 | 0.0241 | 0.0518 | 15.6056 | 0.7024 |
| Sample plot 3 | 0.0131 | 0.0198 | 20.4122 | 0.8679 |
| Sample plot 4 | 0.0066 | 0.0392 | 16.1757 | 0.7632 |
| Sites | ESTARFM | FSDAF | GA-ANN | |||
|---|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | RMSE | MAE | |
| Sample plot 1 | 0.0153 | 0.0243 | 0.0437 | 0.0457 | 0.0199 | 0.0331 |
| Sample plot 2 | 0.2317 | 0.2319 | 0.2301 | 0.2305 | 0.0241 | 0.0518 |
| Sample plot 3 | 0.0140 | 0.0213 | 0.0120 | 0.0332 | 0.0131 | 0.0198 |
| Sample plot 4 | 0.0346 | 0.0577 | 0.0478 | 0.0610 | 0.0066 | 0.0392 |
| Hidden Layer | Random Points | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 500 | 1000 | 2000 | |||||||
| MAE | RMSE | R | MAE | RMSE | R | MAE | RMSE | R | |
| 3 | 0.0282 | 0.0526 | 0.8931 | 0.0557 | 0.0509 | 0.8966 | 0.1050 | 0.0502 | 0.8908 |
| 4 | 0.0281 | 0.0522 | 0.8947 | 0.0557 | 0.0508 | 0.8969 | 0.1051 | 0.0502 | 0.8907 |
| 5 | 0.0281 | 0.0524 | 0.8941 | 0.0557 | 0.0508 | 0.8971 | 0.1050 | 0.0502 | 0.8906 |
| 6 | 0.0281 | 0.0523 | 0.8942 | 0.0557 | 0.0508 | 0.8969 | 0.1051 | 0.0502 | 0.8907 |
| 7 | 0.0281 | 0.0523 | 0.8944 | 0.0557 | 0.0509 | 0.8968 | 0.1054 | 0.0505 | 0.8892 |
| 8 | 0.0281 | 0.0523 | 0.8945 | 0.0557 | 0.0509 | 0.8967 | 0.1050 | 0.0502 | 0.8907 |
| 9 | 0.0281 | 0.0523 | 0.8943 | 0.0560 | 0.0508 | 0.8969 | 0.1050 | 0.0502 | 0.8904 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Hou, P.; Jiang, J.; Zhao, J.; Chen, Y.; Zhai, J. High-Spatial-Resolution NDVI Reconstruction with GA-ANN. Sensors 2023, 23, 2040. https://doi.org/10.3390/s23042040
Zhao Y, Hou P, Jiang J, Zhao J, Chen Y, Zhai J. High-Spatial-Resolution NDVI Reconstruction with GA-ANN. Sensors. 2023; 23(4):2040. https://doi.org/10.3390/s23042040
Chicago/Turabian StyleZhao, Yanhong, Peng Hou, Jinbao Jiang, Jiajun Zhao, Yan Chen, and Jun Zhai. 2023. "High-Spatial-Resolution NDVI Reconstruction with GA-ANN" Sensors 23, no. 4: 2040. https://doi.org/10.3390/s23042040