1. Introduction
Sea cucumber (
Stichopus japonicus) is widely used for food and medicine in Asian and Middle Eastern countries [
1]. Recently, sea cucumber fisheries have grown quickly, especially in China [
2]. However, the management in sea cucumber fisheries is mostly inefficient, and improving sustainable stock is required worldwide [
3,
4]. Currently, growth inspection, population surveying and harvesting in sea cucumber aquaculture are conducted by experienced human divers, which is dangerous and not very efficient.
Recently, advanced underwater robotics and artificial intelligence have provided technical solutions for improving the automation level and decreasing production costs in aquaculture. Visual observation is one of the key techniques for achieving intelligent aquaculture. Optical digital imaging has been rapidly developing in the last decades [
5]. High resolution images could be acquired by using low-cost portable cameras. Low-cost portable cameras have become a common tool for marine biodiversity investigation, underwater surveillance and visual inspection tasks. The cameras could be carried by divers or integrated into observation facilities (e.g., remote operated vehicles (ROV) or observation stations) to collect underwater images or videos [
6].
Numerous underwater videos and digital images have been collected in coastal cultivation areas. Currently, these video and image records should be examined by trained human experts for population surveying or growth inspection in natural conditions. Automatic analysis of sea cucumber in natural conditions has not been widely applied to aquaculture practices. Detecting sea cucumber in its natural habitat is a challenging task due to the complicated illumination conditions, turbidity of water, varying body shape and occlusions. For practical applications in sea cucumber cultivation, automatic sea cucumber detection and monitoring are challenging and necessary. Most studies of sea cucumber image analysis in natural conditions have been made in recent years. Classification of eight species of benthic organisms, including sea cucumber, was implemented by a tree-structured support vector machine (SVM) classifier [
7]. Color, texture and structure features were extracted from the target images. The results showed that some taxa (e.g., the small sea cucumber) are still challenging for both humans and observation systems. Movement tracking of sea cucumber by underwater video was implemented by a color histogram mean-shift based tracking [
8]. This method was able to track the sea cucumber movement; however, manual initialization is required to select the individual image of sea cucumber to initialize the tracking process. Another limitation was the fact that the tracking algorithm mainly depends on color features. Color distortion issues are severe in underwater conditions and the sea cucumber was not always distinguishable from the natural background. To minimize the color distortion, the underwater images were initially processed by contrast limited adaptive histogram equalization (CLAHE) to enhance the image features [
9]. Sea cucumber segmentation is conducted by using an active contour model in natural conditions [
10]. The edge feature of thorns was utilized to locate individual sea cucumbers from the underwater images. The active contour models (ACM) demonstrated excellent capability in matching the body shape of the individual organisms [
11]. The above works dealt with single sea cucumbers from a specified condition, and the location of the sea cucumber was given in the image.
Accurate detection of individual sea cucumbers is a fundamental initial step toward sophisticated sea cucumber image analysis (e.g., tracking or segmentation). Unfortunately, illumination variations, shadows and occlusions are still the most challenging issues in underwater sea cucumber detection. In recent years, deep neural networks have rapidly developed and been successfully applied to computer vision fields [
12]. Generic object detection algorithms, such as faster region-based convolutional neural network (Faster R-CNN), single shot multibox detector (SSD), and you only look once (YOLO), have been applied to the in situ detection of marine organisms (e.g., sea cucumbers) [
13,
14]. These works focused on common issues suffered in underwater object detection, e.g., real-time detection ability, small target detection and the improvement of detection and recognition accuracy. To improve the real-time detection ability, lightweight models were developed by pruning the existing object detection models (e.g., SDD) or integrating lightweight backbones such as MobileNet [
15,
16]. On the other hand, multiple scale detection was studied for detecting small targets in underwater scenes. A multi-scale feature fusion strategy, shortcut feature pyramid network (S-FPN) was proposed to improve the detection accuracy of small targets by introducing various shortcut connections between feature pyramids. Giving an additional detection head to the YOLOv5 model could also enhance the multiple scale detection and improve the detection accuracy of small targets [
17]. Attention mechanisms were effective in learning object features and increasing the receptive field could improve the detection accuracy and robustness in recognizing underwater small targets [
18]. Furthermore, many works were reported on the modification of feature extraction networks which improved the ability of the feature representation of underwater targets. Residual networks were utilized as a backbone for enhancing the feature extraction efficiency in detecting sea cucumbers [
19,
20]. Jiang et al. proposed a channel sharpening attention module (CSAM) to further fuse high-level image information [
21]. The CSAM was incorporated into the YOLO v3 network and provided the network with the privilege of selecting feature maps. Recently, triplet attention was utilized to modify the YOLO v5 and superior to the state-of-the-art models. Previous works mainly focused on developing or modifying underwater target detection models to achieve better performance in practical applications.
The distortion of underwater images presents different characteristics as natural conditions change, which is a challenge for underwater target detection algorithms to face. Detection of underwater targets from varying underwater scenes is necessary to meet the practical applications of underwater target detection. Image enhancement is a necessary data augmentation method and has been widely used in underwater target detection tasks. A histogram-based image enhancement was reported for the pre-processing of underwater images [
22,
23]. Huang demonstrated that image enhancement can effectively improve the detection performance of the YOLO v5 in natural scenes [
24]. A deep learning-based image restoration was applied to remove haze and light diffusion from the underwater scenes and improved the detection accuracy of sea cucumber [
21]. On the other hand, synthetic images are developed as a data augmentation method to enrich the underwater image sets. Huang et al. proposed an improvement of underwater target detection by simulating the images of different marine turbulence environments [
25]. Generative adversarial networks (GAN) were utilized to stimulate the image degradation and synthesize images of underwater scenes. The GAN-based approaches could augment the image datasets and improve the detection performance of underwater targets [
26].
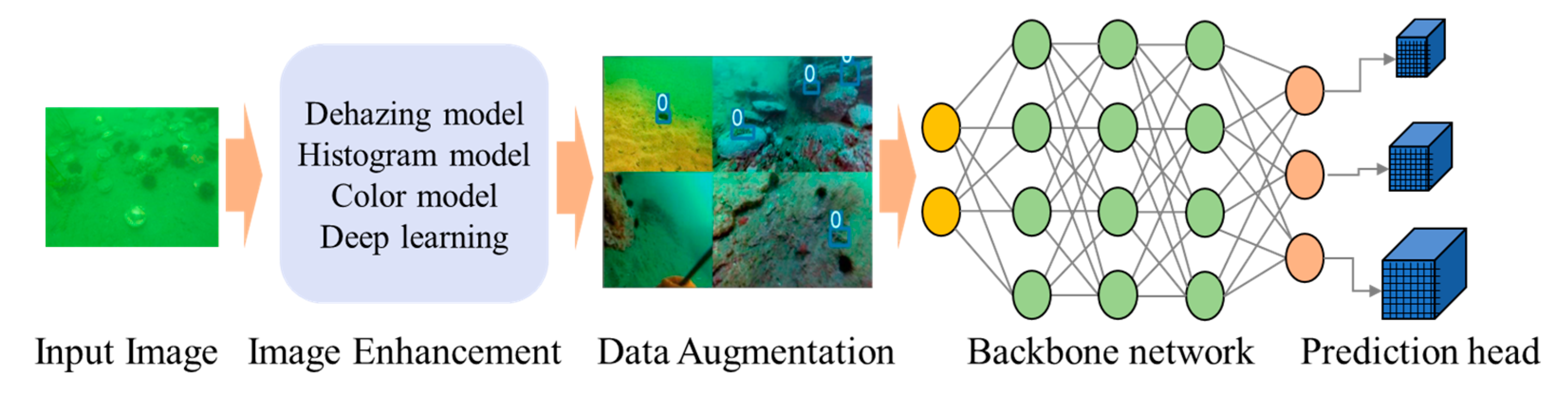
However, marine organism (e.g., sea cucumber) detection across multiple natural scenes has not been widely studied. In addition, the efficiency of image enhancement schemes and the detection accuracy under various distortions were not extensively addressed. Therefore, this work proposes to investigate the sea cucumber detection performance by state-of-the-art object detectors and enhancement methods. The proposed sea cucumber detection strategy is presented in
Figure 1. Sea cucumber images from multiple underwater scenes are restored and enhanced by various underwater image enhancement techniques. The enhanced images are trained and tested by the recent object detectors, separately. Finally, the best detection strategy is investigated by analyzing the detection and counting results.
The main contribution of this work is to investigate and analyze the performance of underwater sea cucumber detection in various underwater scenarios using state-of-the-art object detection models and image enhancement.
The cutting-edge object detection algorithms, YOLOv7 and YOLO v5, were chosen to implement sea cucumber detection in four different underwater scenes. The experimental results demonstrated that YOLOv7 outperformed YOLO v5, the latest version of faster R-CNN in underwater sea cucumber detection.
Frequently applied underwater image enhancement methods, including dehazing models, histogram-based enhancement, physical color model and deep learning-based enhancement, were adopted to test the sea cucumber detection across various underwater scenes. The efficiency of these methods was investigated and the non-local image dehazing (NLD) was the most effective method for all object detection models.
Moreover, the real-time ability of YOLOv7 and YOLOv5 was tested. Both of the YOLO models reached the real-time requirements. The proposed work could be a guide for practical underwater surveillance and other related tasks.
The rest of this work is organized as follows:
Section 2 describes the details of multiple scene datasets. The proposed sea cucumber detection strategy and the evaluation metrics are presented in
Section 3. Experimental setup and results are reported in
Section 4. The advantages of the proposed scheme and efficiency of the image enhancement methods are discussed in
Section 5. Finally, this work is concluded in
Section 6.
2. Materials
Underwater images from various scenes were collected for developing and verifying the in situ sea cucumber detection scheme. The underwater sea cucumber images were captured by hand-held video cameras (e.g., GoPro) or ROV. Frequently occurring situations in natural conditions are presented in our underwater image dataset, which includes various poses of individual sea cucumbers, varying illuminations, color distortion and image blurring. Images were captured under natural light and artificial lighting. Light conditions present large variation and unequal illumination. Color distortion also occurs under different conditions in our dataset. The image backgrounds contain sea grass, rock and sand. Sea cucumber individuals are shown with a bent body, lying on the ground or climbing rocks. In some places, sea cucumbers aggregate or are occluded by other individuals, grass and rocks. As the underwater images were captured by moving camera, individual sea cucumbers are presented in various scales, and blurred images feature in our datasets. Examples of underwater images in our datasets are presented in
Figure 2.
In this work, sea cucumber images are divided into four datasets according to the observation location. Dataset1 contains sea cucumbers on a grass, rock and sand background, and natural illumination and artificial light are both present. Sea cucumbers are scattered in the background, and the individuals are not occluded or attached to each other. Sea cucumber individuals are seldom occluded by grasses. Due to color distortion, images present in blue (natural illumination) and white (artificial light) styles. Dataset2 shows the sandy bottom captured by a diver. Low numbers of sea cucumber individuals are presented in each image, and occlusions are not presented. The image color in dataset2 shows yellow style under natural illumination conditions, and the visibility is sufficiently poor that some individuals are difficult to identify by the naked eye. Sea cucumbers in dataset3 are mainly located on big rocks. Multiple individuals are presented in the images. Some images in dataset3 show aggregated sea cucumbers where individuals are attached to and overlapping each other. In addition, a small proportion of images are blurred due to camera motion. Sea cucumbers are difficult to identify in these images, which are light blue in tone. In dataset4, images are captured among sand and small rocks. Image tone is light green due to color distortion. Blurred images are presented in this dataset.
Detailed information of each dataset is given in
Table 1. Sea cucumbers in all datasets were manually labeled by experienced technicians. In this work, 80% of the images were randomly selected as training data, whereas the rest (20%) were used for validation, as in previous studies of deep learning-based computer vision applications [
27,
28]. Although the image datasets have various image resolutions, all images were normalized to the same according to the requirements for training the detection model. Access to the dataset is given in the
Supplementary Materials.
5. Discussion
Detecting sea cucumbers in natural conditions is a challenging task, especially in complex scenes with low-quality images. The outstanding ability of feature extraction by deep convolutional neural network and effectiveness of image enhancement were verified in this work. The latest version of YOLOv7 was effective in detecting sea cucumbers in various conditions. In the experiments, the AP of YOLOv7 was 1.7% higher than the AP of YOLOv5, which proved the advancement of YOLOv7. The NLD could effectively increase the detection accuracy of sea cucumber across multiple scenes for both YOLOv7 and YOLOv5. The APs of YOLOv5 on each dataset were improved by applying NLD enhancement (
Table 3). For YOLOv7, the APs of dataset1, 3 and 4 were successfully increased by applying NLD enhancement. The improvement of detection performance by NLD is attributed to the enhancement of detailed or local image features and image contrast. Estimating and removing haze lines was suitable for the application of underwater target detection. On the contrary, CLAHE, DCP, UGAN and Retinex could not contribute improvements for sea cucumber detection in all datasets. These image enhancement methods could only improve the detection performance in a certain scene. For example, the APs of YOLOv5 enhanced by CLAHE and DCP reached the best AP of 0.995 in dataset2. In addition, CLAHE and Retinex could significantly improve the AP of YOLOv7 in dataset1. Although the images reconstructed by UGAN present the best color restoration to the human vision system (
Figure 5) it could not help to improve the detection accuracy in the tests. The results indicate that color restoration is less effective to enhance the detection ability of YOLOv7 and YOLOv5 since a series of data augmentation methods (e.g., mosaic) is utilized to enrich the feature representation in YOLOv7 and YOLOv5 and the detection models focus on learning morphological and texture features of the targets.
One of the challenging issues in sea cucumber detection is the clarity of images. The images in dataset1 and dataset2 presented distinct appearance features, and sea cucumber individuals showed regular shape and less occlusion. These images were clear, with high resolutions. Although color distortion occurred in dataset1 and dataset2, the body feature of the sea cucumber was distinct from the background. The deep convolutional network accurately learned the shape of the sea cucumber. Therefore, high values of AP in dataset1 and dataset2 infer those images presenting typical sea cucumber characteristics (e.g., the “prickle” on the sea cucumber’s body) could be accurately recognized even under slight color distortion, whereas the image enhancement could improve the detection accuracy from low-quality images. Small-sized objects could be accurately detected by enhancing the image quality. These small sea cucumbers were usually difficult to find in the original image due to low visibility. After dehazing processing, the image feature and contrast of these small objects could be emphasized. Consequently, they could be accurately identified from the background. On the contrary, dataset3 and dataset4 presented rather difficult situations. Image blurring was severe and visibility was low. Many of the individuals were also difficult to identify for human experts. Therefore, the AP of YOLOv5 in dataset3 and dataset4 were much lower than dataset1 and dataset2. It is notable that the detection accuracies of dataset3 and dataset4 were significantly improved by YOLOv7, especially as the AP was improved by 4.2% by combing YOLOv7 and NLD enhancement in dataset4 (
Table 2 and
Table 3).
In addition to the poor-visibility issue in underwater images, image blurring is another main factor decreasing detection accuracy in underwater images. The blurred image is caused by the fast motion of the cameras. In this research, images in dataset3 and dataset4 were the frames from underwater videos captured by a ROV. The high-speed movement or rotation of ROV could lead to image blurring, and the undercurrent in the water could make ROV shaky or spinning, and consequently blurred images were recorded in this situation. In fact, the blurred sea cucumber images did not show much “sea cucumber features”. On the other hand, sea grass and rocks presented similar appearance in the low-quality underwater images. Most false alarms incorrectly identified the brown-colored sea grasses and small stones as sea cucumbers. When the visibility was low, the detection model also located the texture on a rock surface as sea cucumber due to texture similarity. To improve the stability of sea cucumber detection, recognition using image sequence could be considered to reduce the effects of blurred or less visible images.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}