
Observer-Based Optimal Control of a Quadplane with Active Wind Disturbance and Actuator Fault Rejection


Abstract
:1. Introduction
- An unknown input observer with a theoretical convergence proof is applied to real-time simultaneous wind gust velocities and actuator fault estimation. Compared to three classical observers used for comparison, this observer is shown to significantly improve estimation accuracy. The three alternative observers are inspired from [30], where output error integration is used, [39], where the observer uses acceleration measurements as indirect disturbance observations and [40], where a sliding mode observer (SMO) was used. The proposed observer uses an auxiliary variable to avoid acceleration measurements and is simple to tune for exponential convergence.
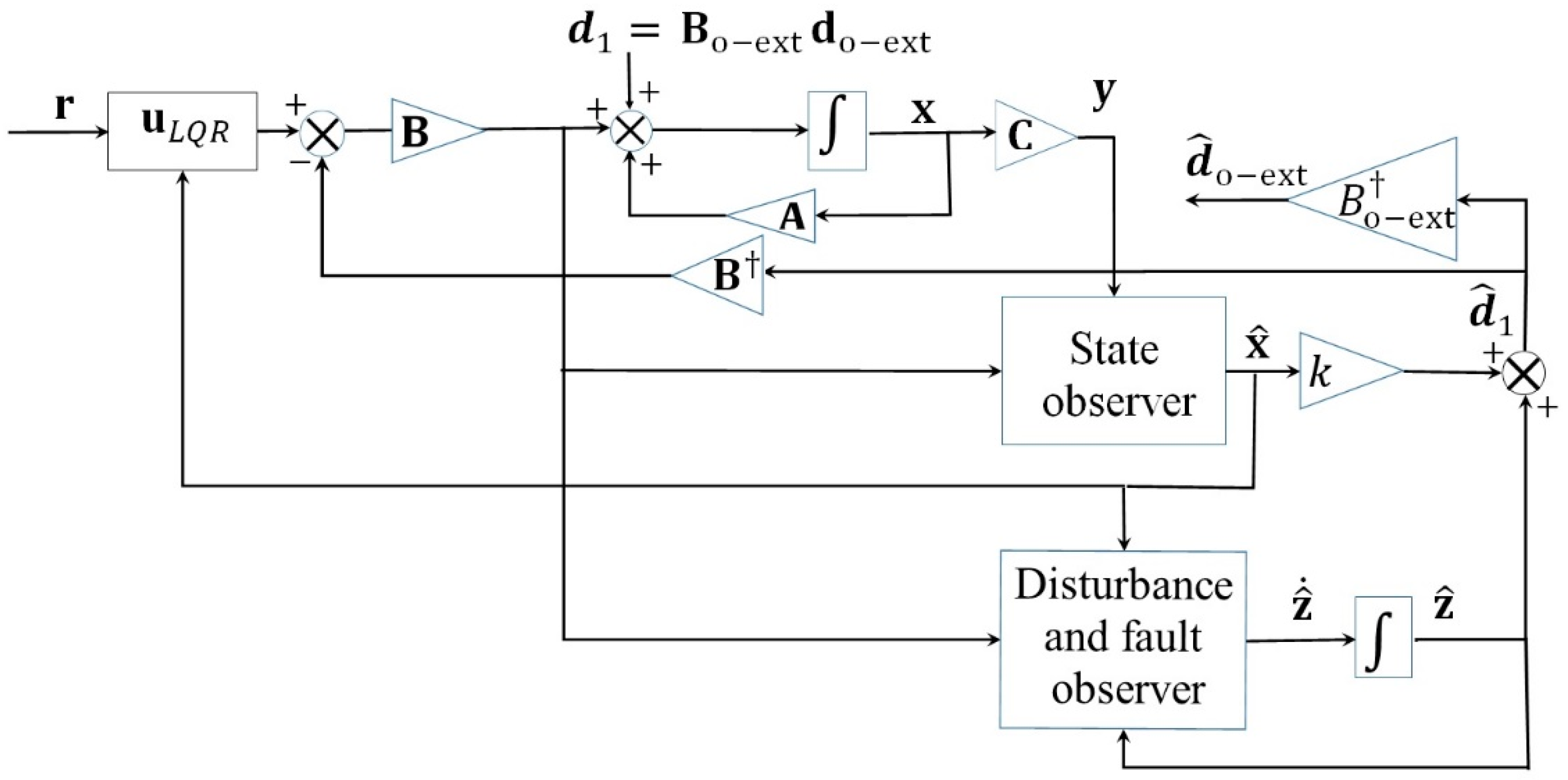
- An observer-based control approach with wind gusts and actuator fault rejection under the plane, quad and transitioning modes, which significantly enhances path following accuracy. This approach combines a linear quadratic regulator (LQR) with a H¥ controller with exact wind and fault compensation based on a pseudoinversion process. LQR and H¥ control are used without loss of generality as benchmark controllers to be enhanced. The control architecture is simple to implement by separating state and perturbation estimation.
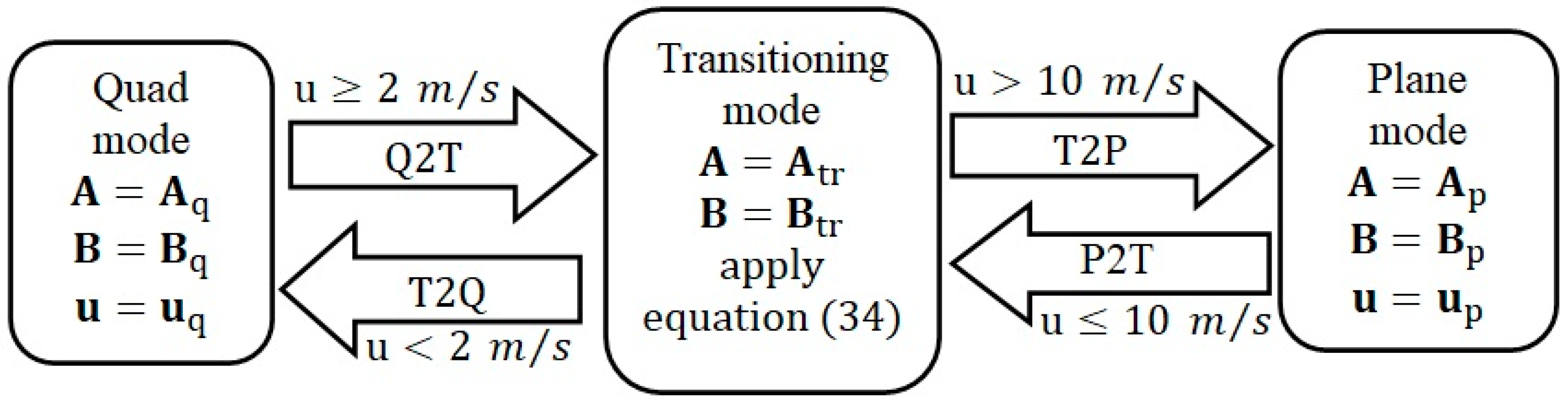
- A linearised quadplane model with disturbance and fault inputs, with analytical trim conditions for the plane and quad modes and numerical trimming for the transition modes. A speed dependent weighted transitioning logic is used between the quad and plane modes.
2. Quadplane Dynamic and Kinematic Models
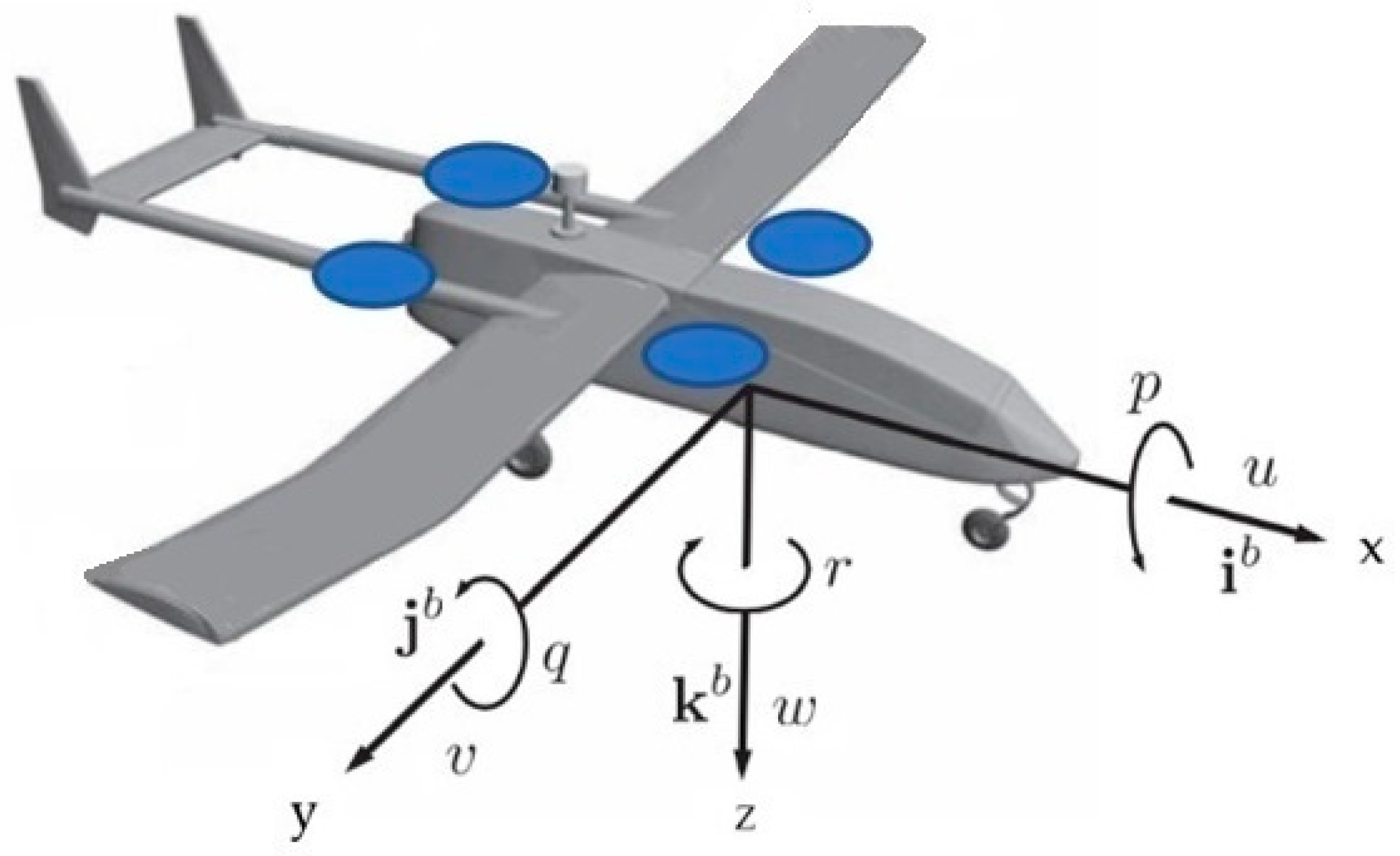
2.1. Nonlinear Aircraft Dynamics
2.2. Longitudinal Dynamics and Kinematics Equations
2.3. Forces and Moments Equations
2.3.1. Gravitational Forces
2.3.2. Plane Commands Related Aerodynamic Forces and Moments
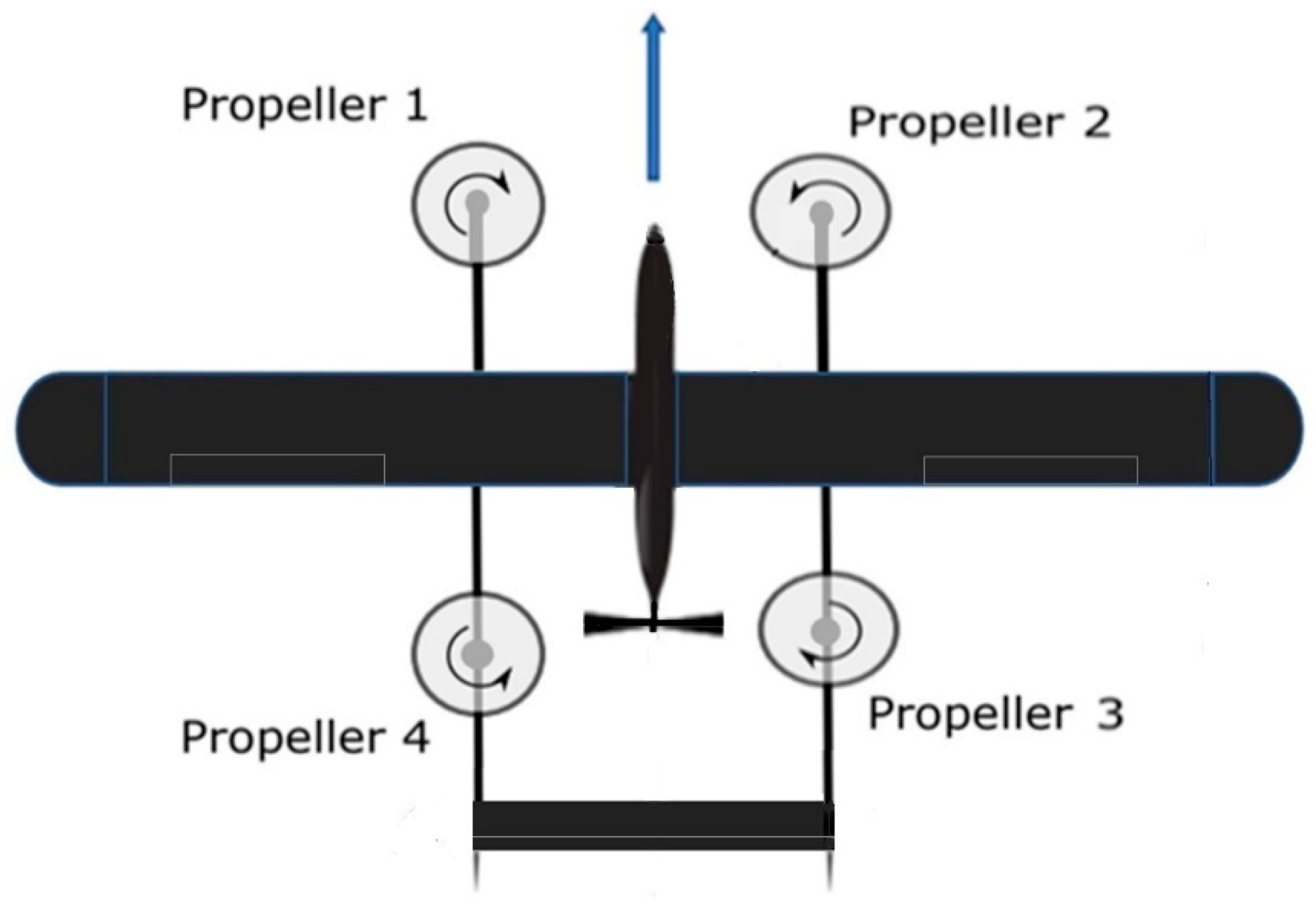
2.3.3. Quad Forces and Moments
2.3.4. Throttle Force
2.3.5. Total Longitudinal Forces and Moments
2.4. Quadplane Model Linearisation
2.4.1. Plane Model
2.4.2. VTOL Model
2.4.3. Transitioning Model
2.5. Atmospheric Turbulence Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Continuous Dryden Filter | MIL-HDBK-1797B |
|---|---|
Transfer function for the longitudinal wind velocity | |
Transfer function for the vertical wind velocity | (39) |
Transfer function for the pitch rate due to wind gusts |
3. State and Perturbation Observers
3.1. State Observer
3.2. Unknown Input Observer for Wind Perturbation Estimation
3.3. Auxiliary Variable Observer with Exponential Convergence Rate (AVOECR) for Wind Disturbance and Fault Estimation
4. Observer-Based LQR with Disturbance and Fault Rejection
4.1. Reference Following LQR
4.2. LQR with Observer-Based Active Disturbance and Fault Rejection
5. Numerical Simulation Analysis
5.1. Observer-Based Wind Disturbance Rejection
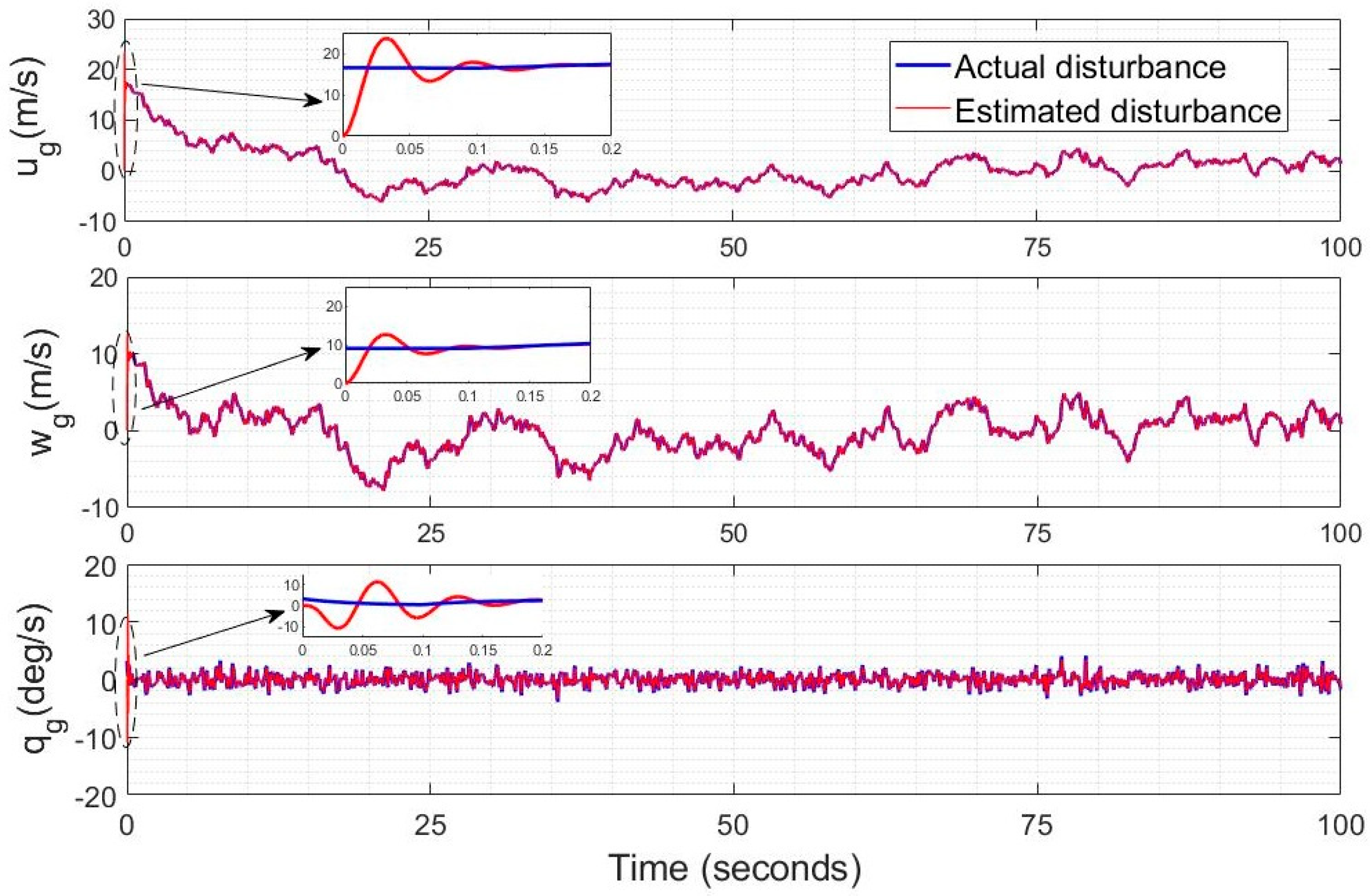
5.1.1. Wind Observer Estimation Accuracy
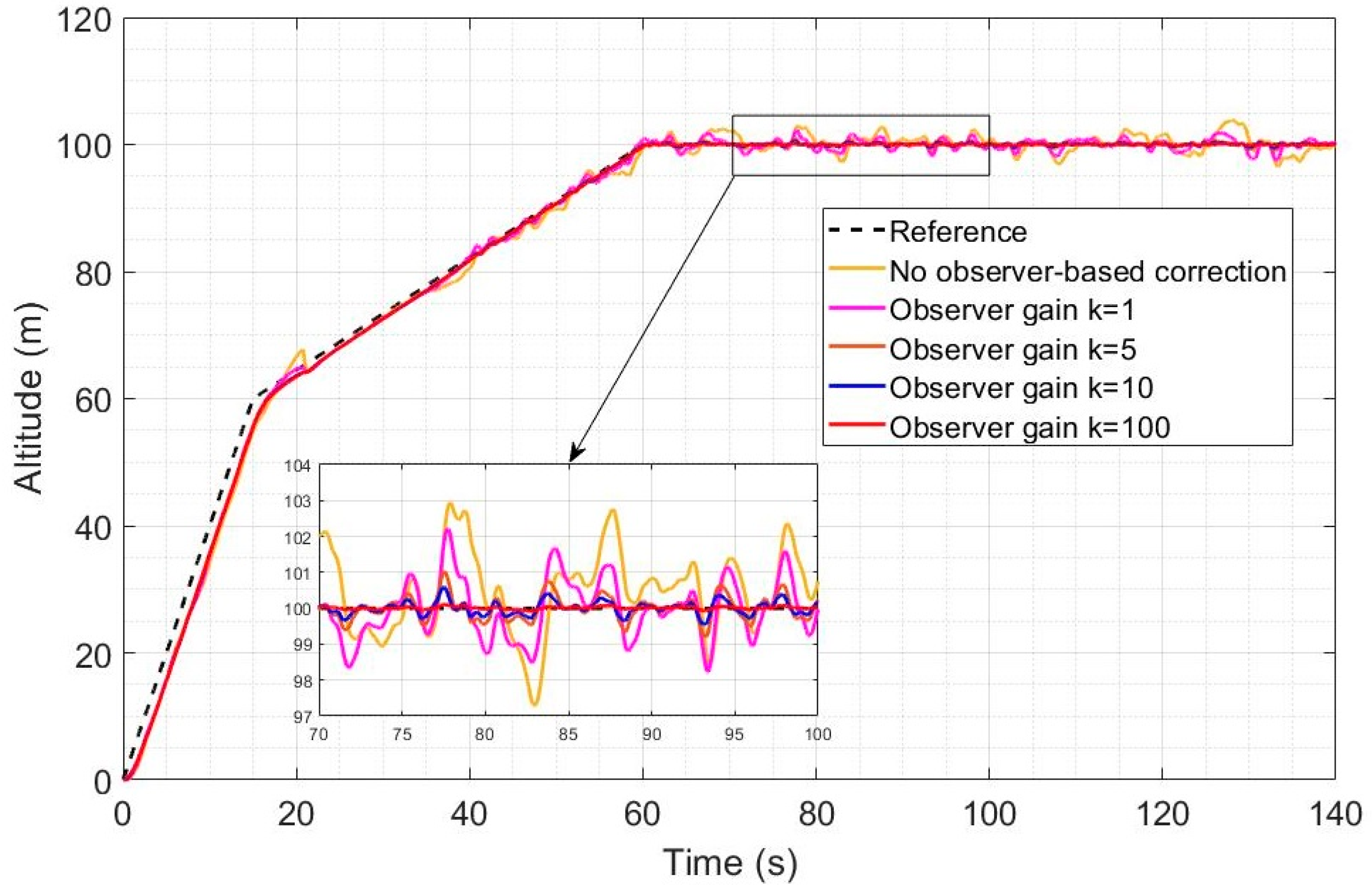
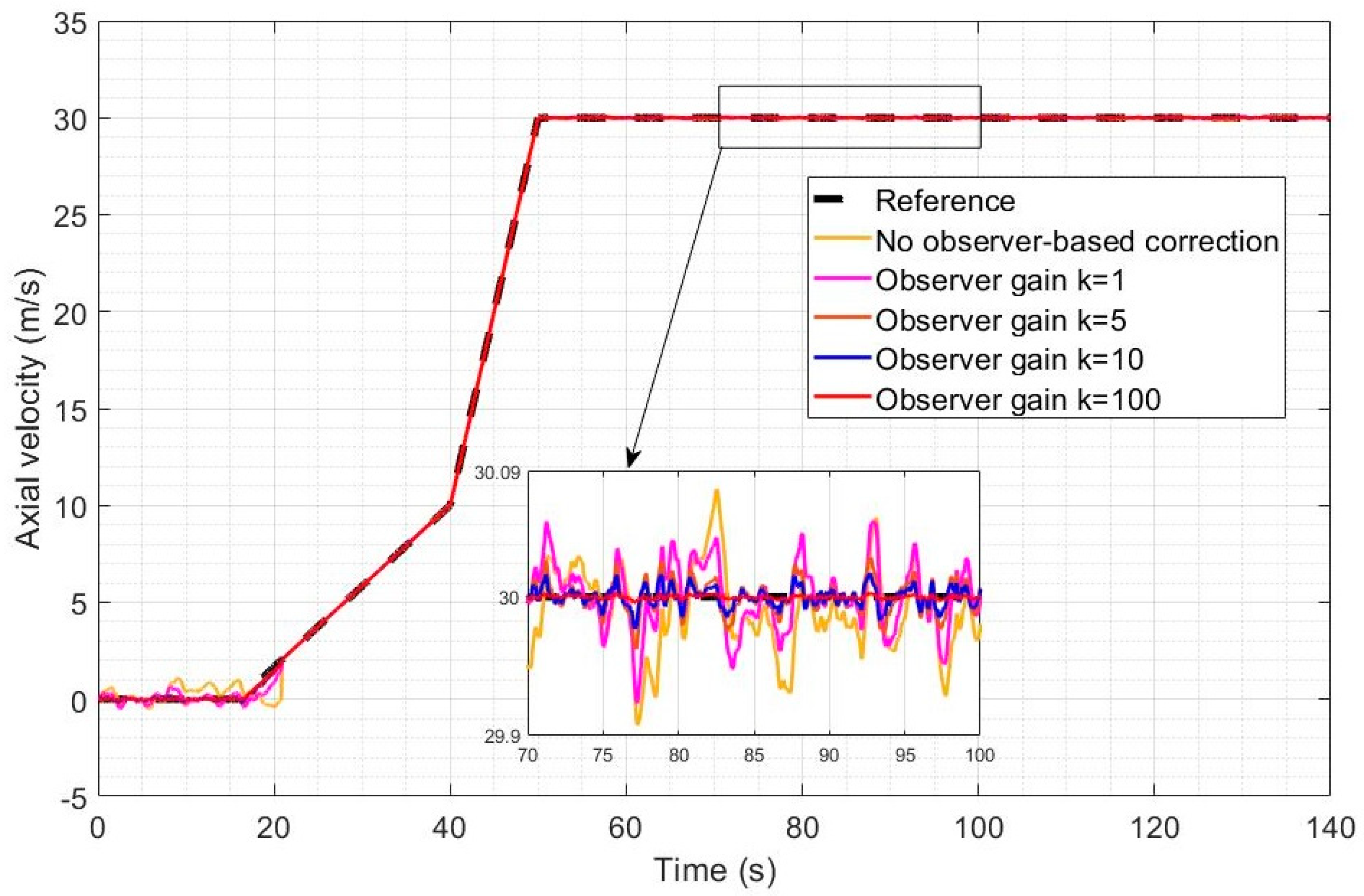
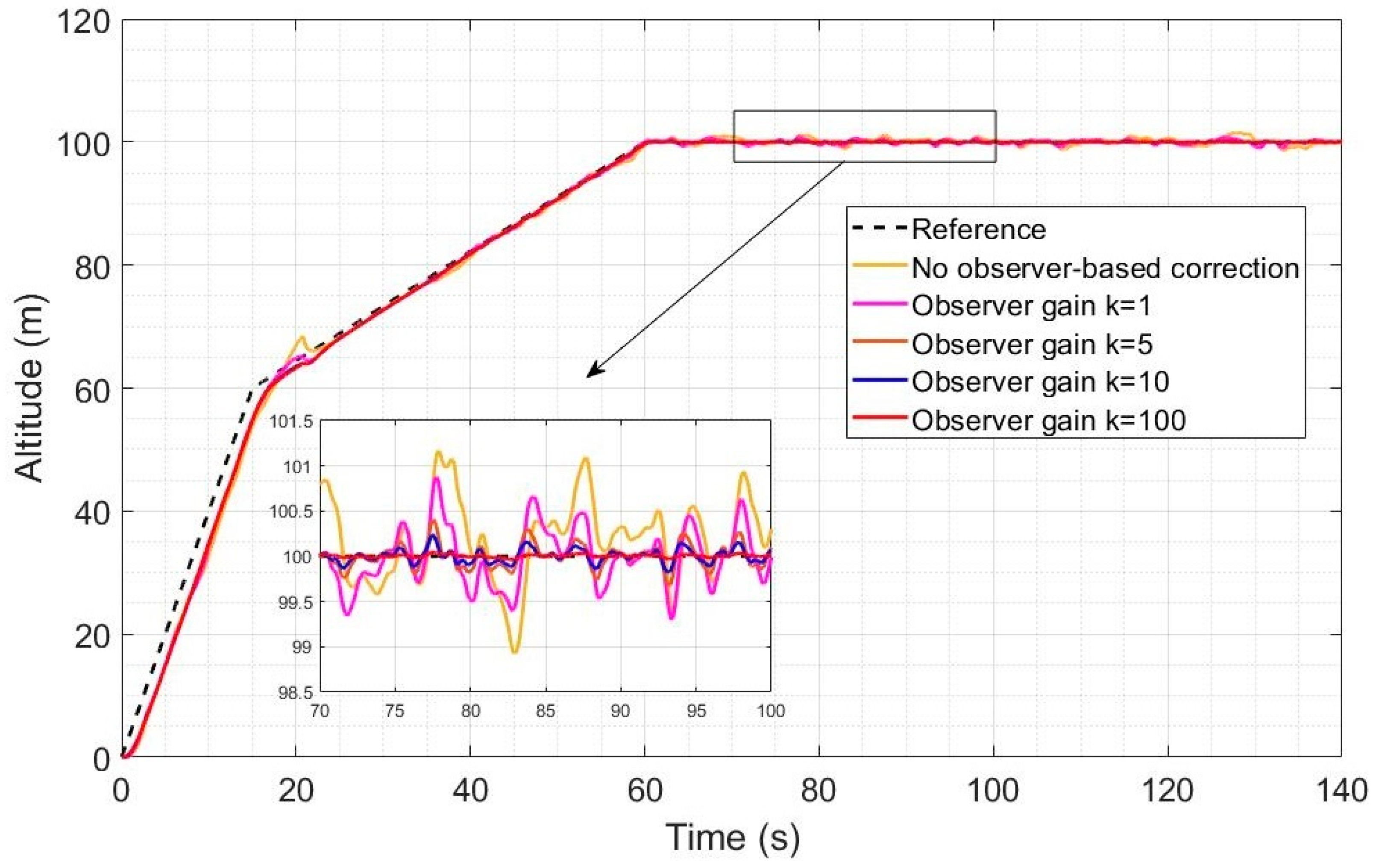
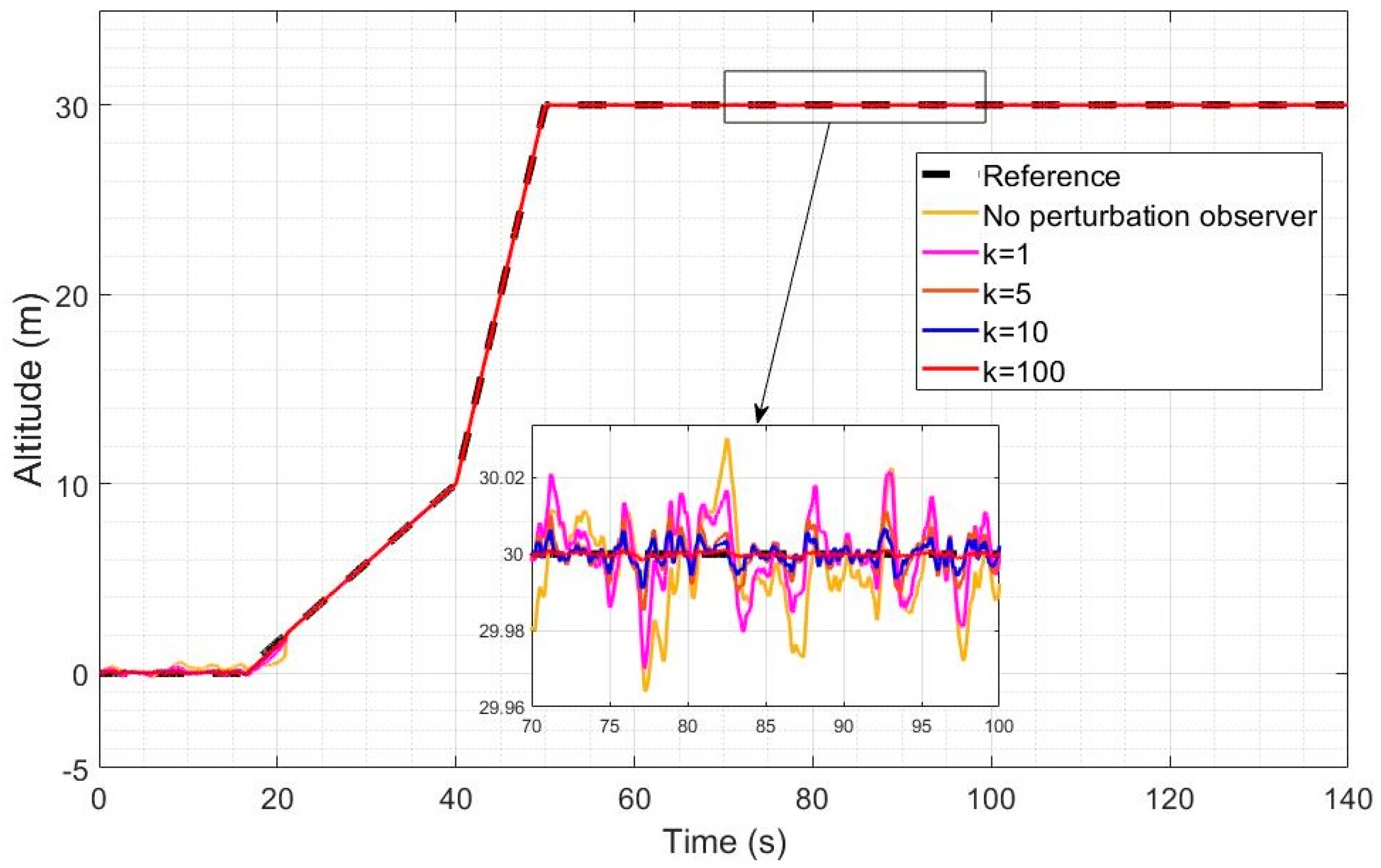
5.1.2. Effect of the Observer Gain on Wind Disturbance Rejection
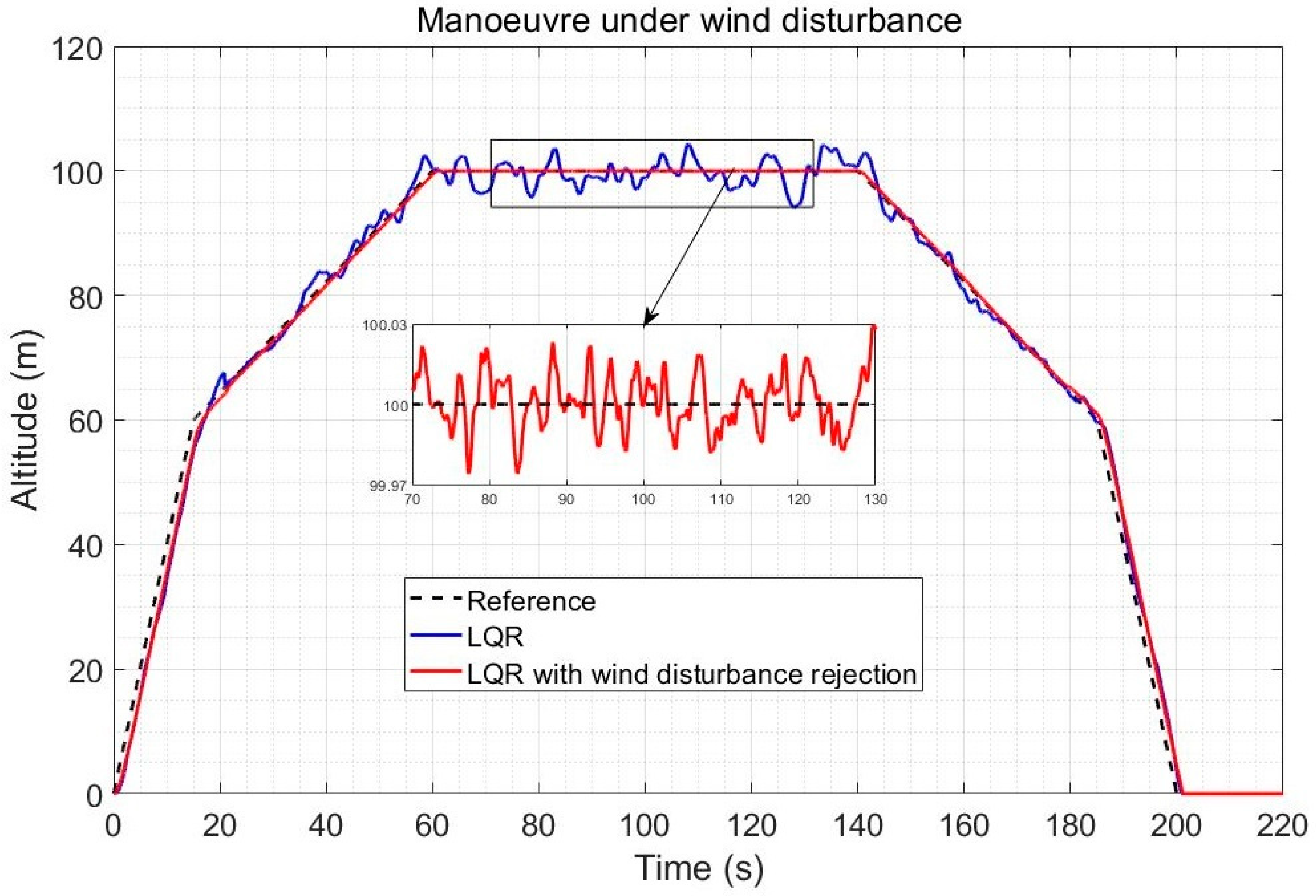
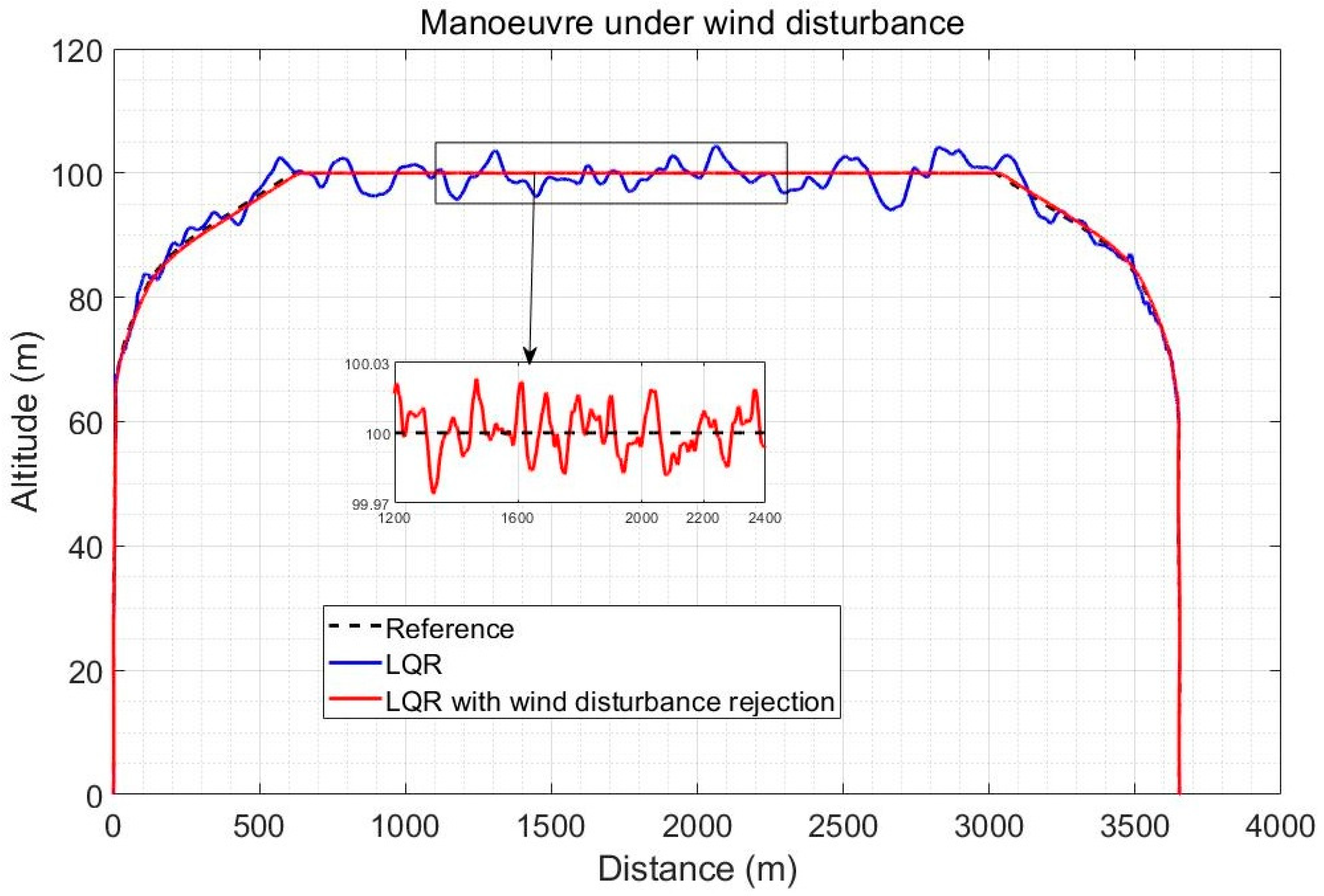
5.1.3. Observer-Based Trajectory Tracking Control under Wind Gusts
5.2. Observer-Based Control with Active Combined Wind and Fault Rejection
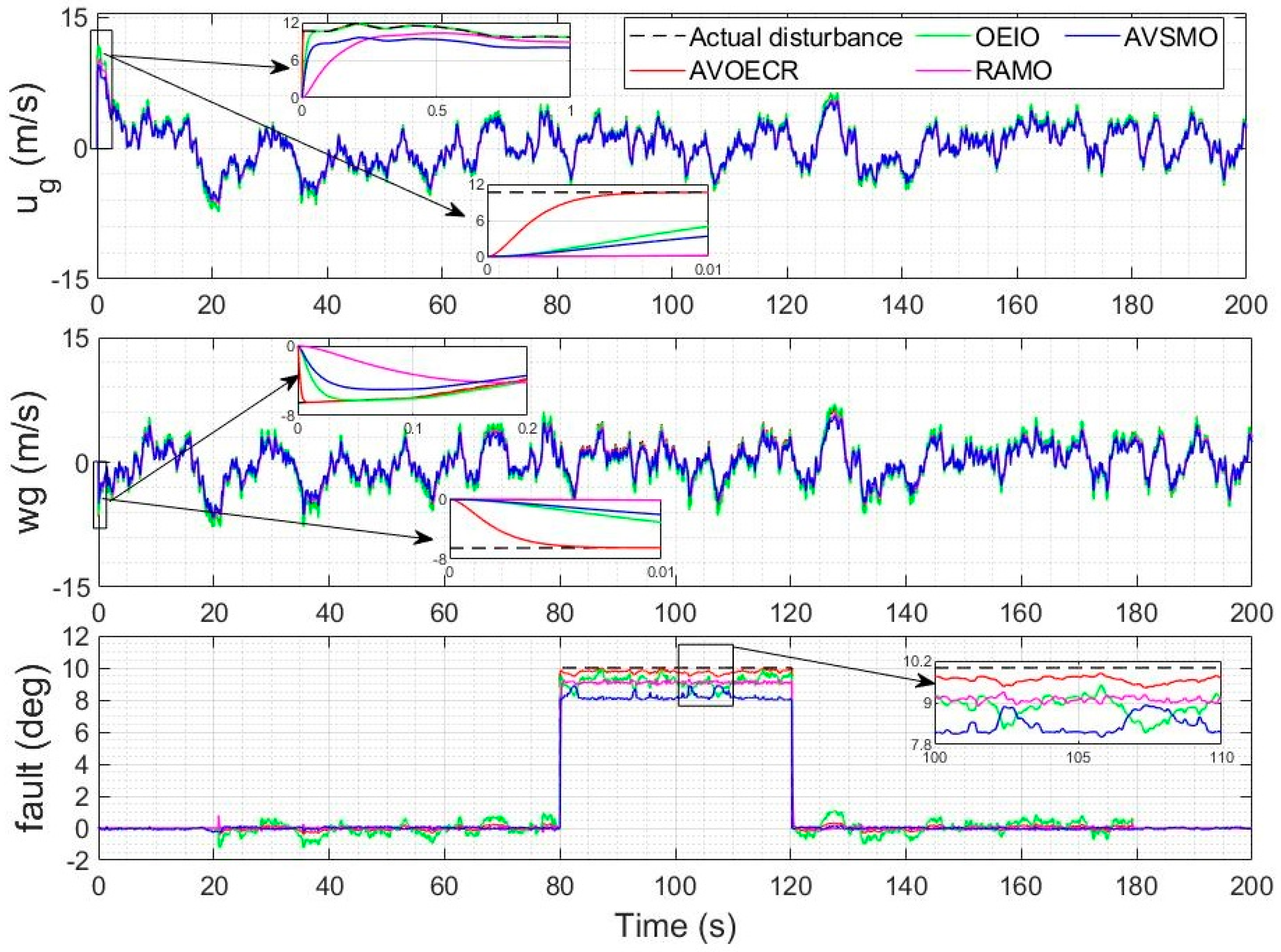
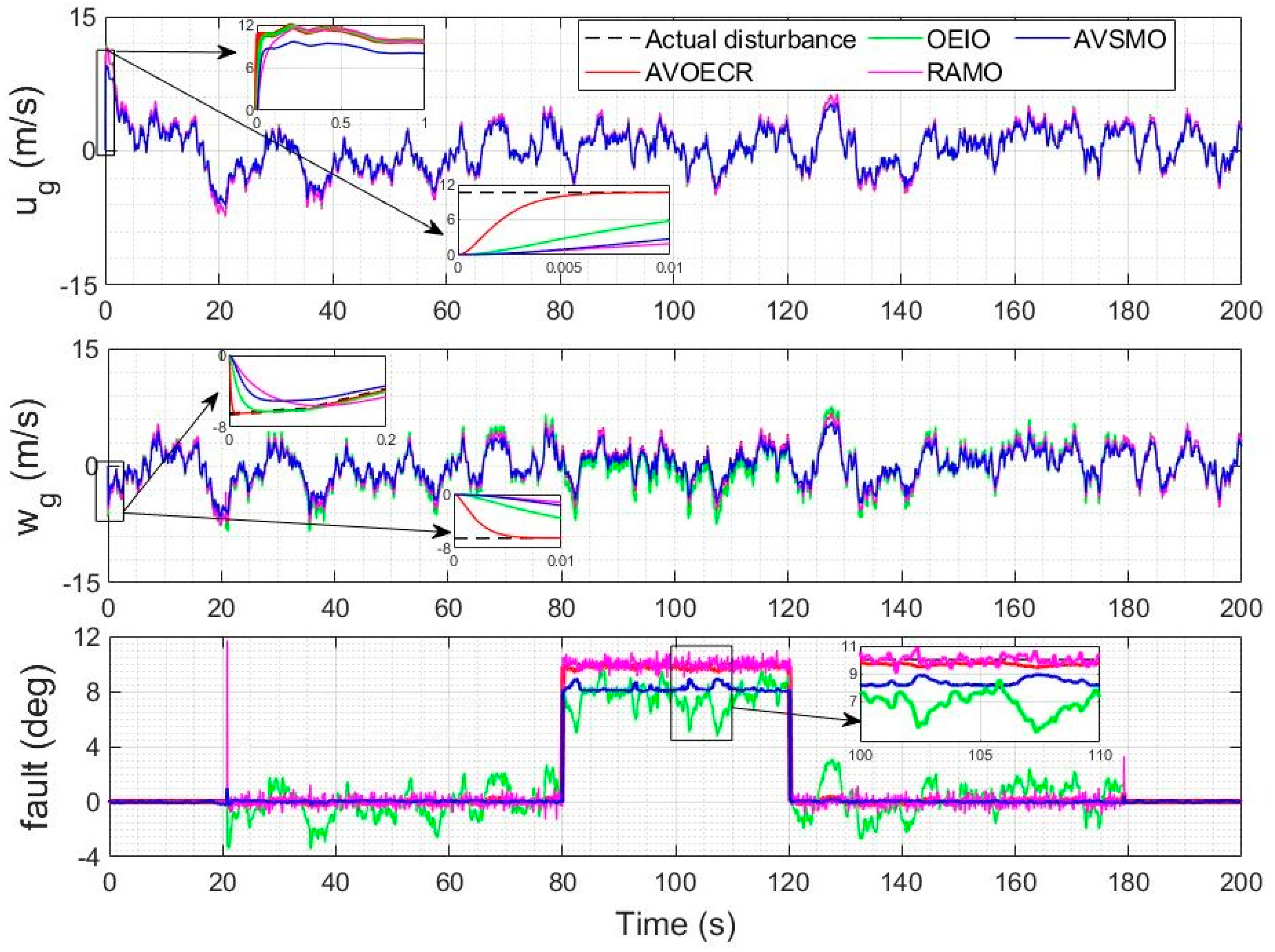
5.2.1. Observer-Based Combined Wind Disturbance and Fault Estimation
5.2.2. Observer-Based Controllers Comparison under Simultaneous Actuator Fault and Wind Disturbance
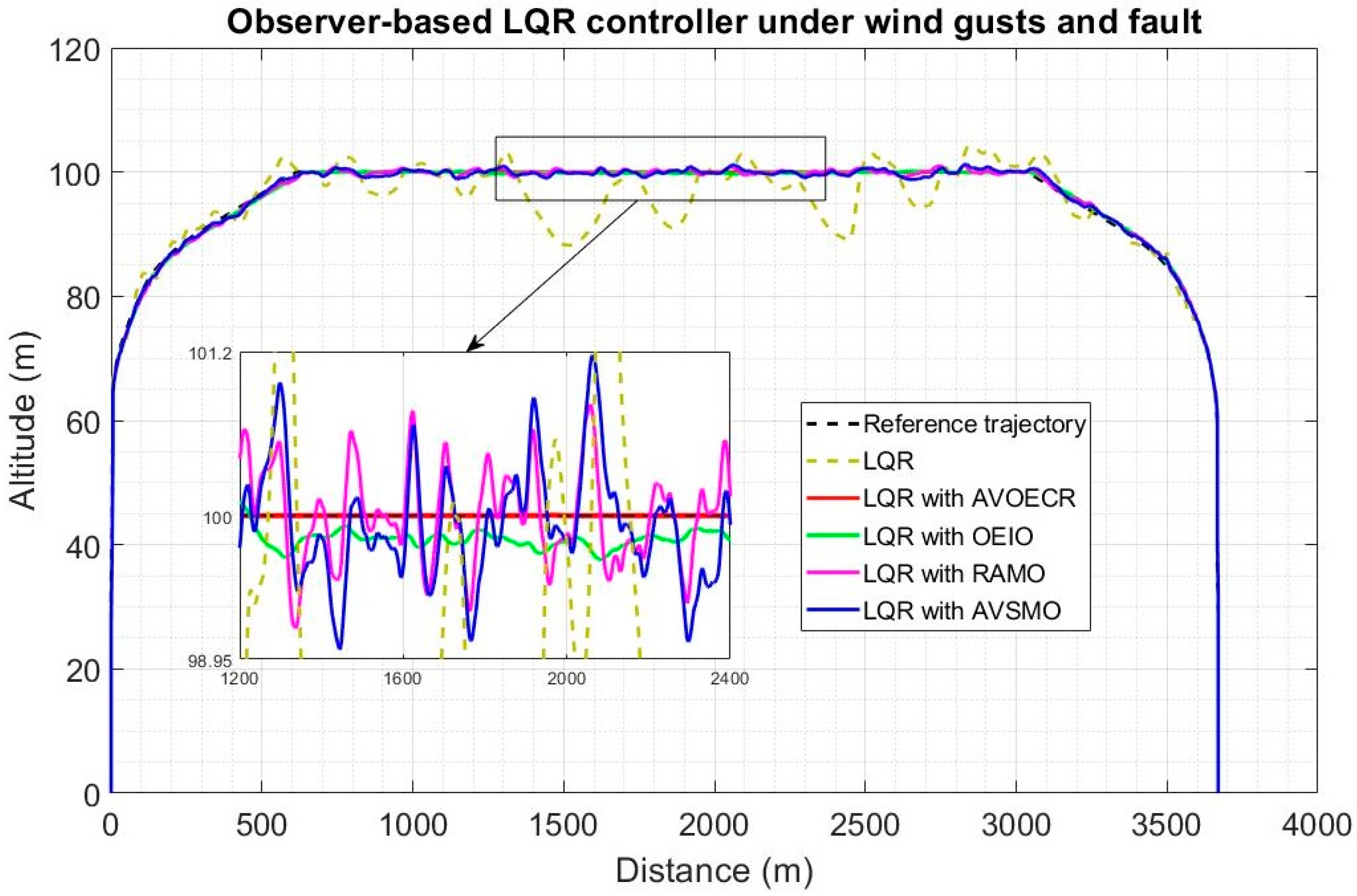
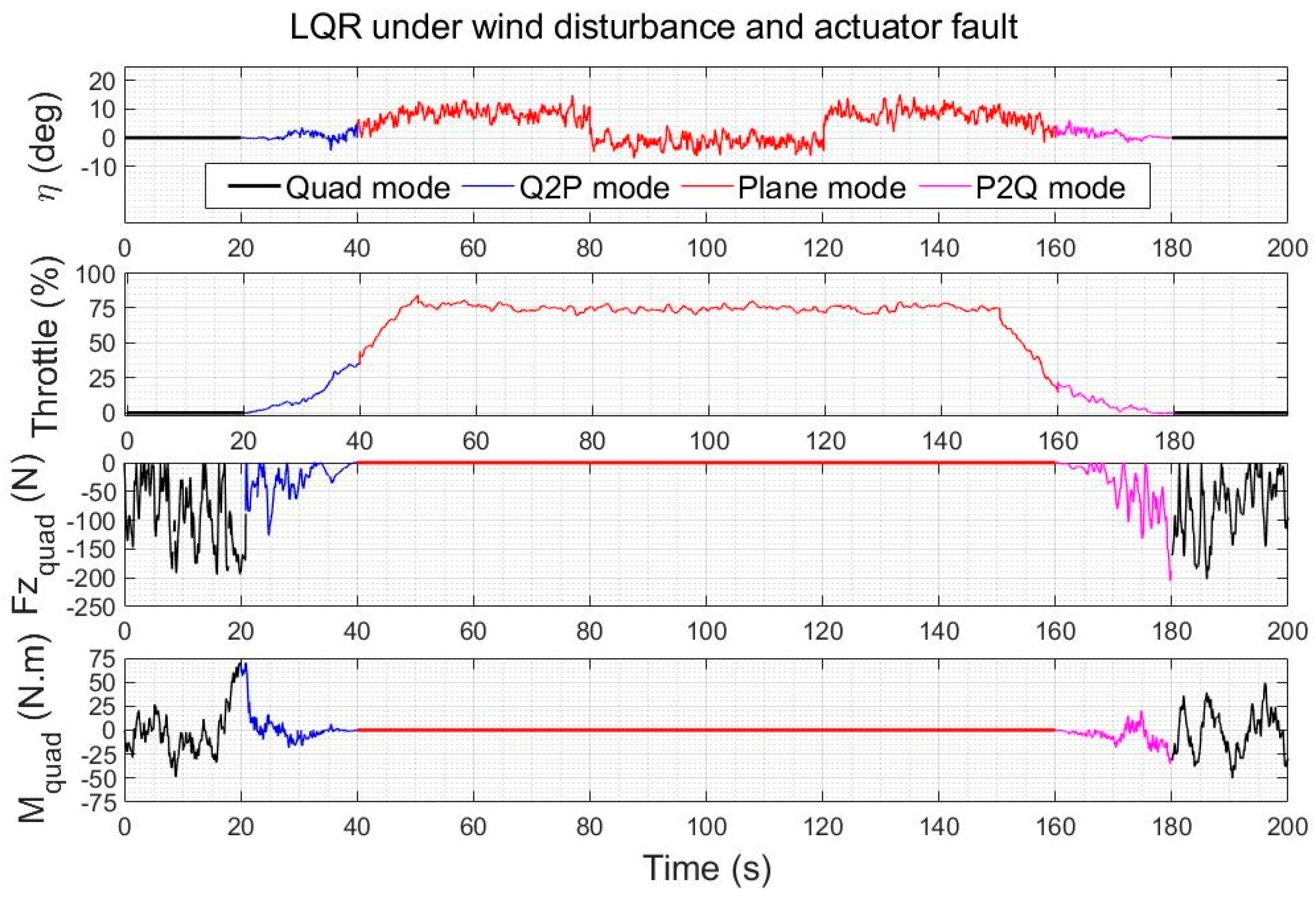
5.2.2.1. LQR with Observer-Based Disturbance and Fault Rejection
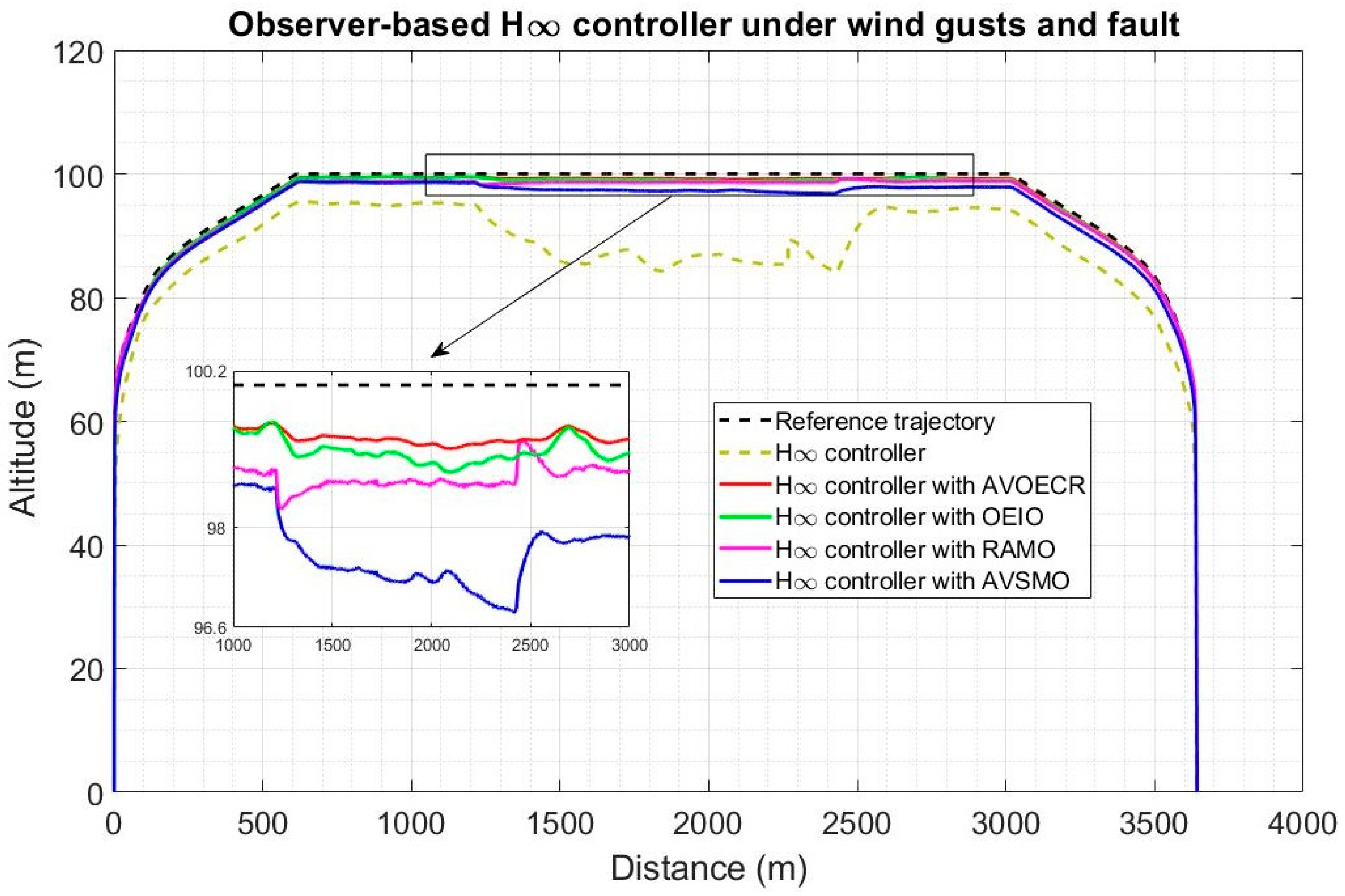
5.2.2.2. Observer-Based H∞ Control
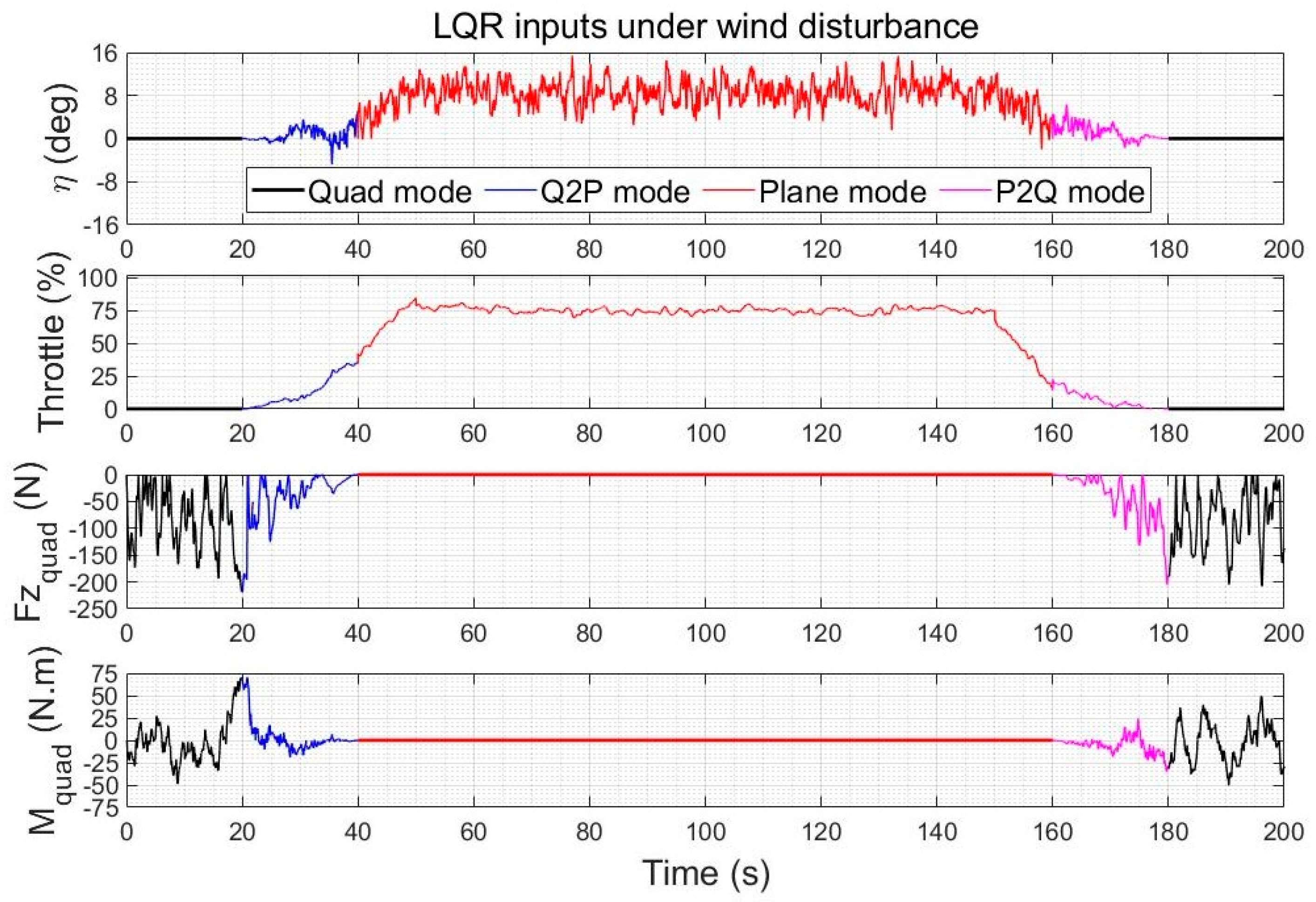
5.3. Control Effort Evaluation
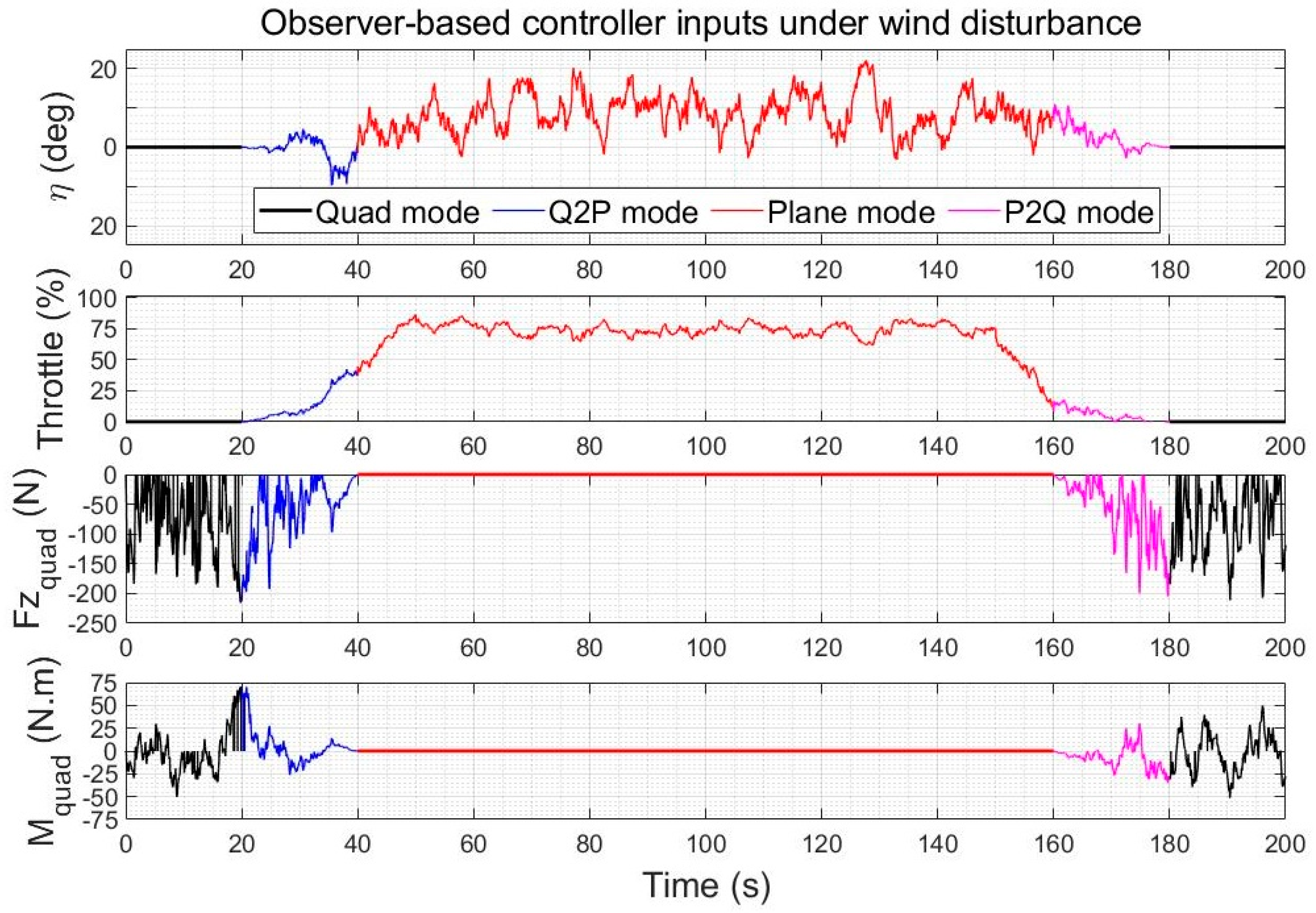
5.3.1. Control Effort Comparison under Wind Gusts
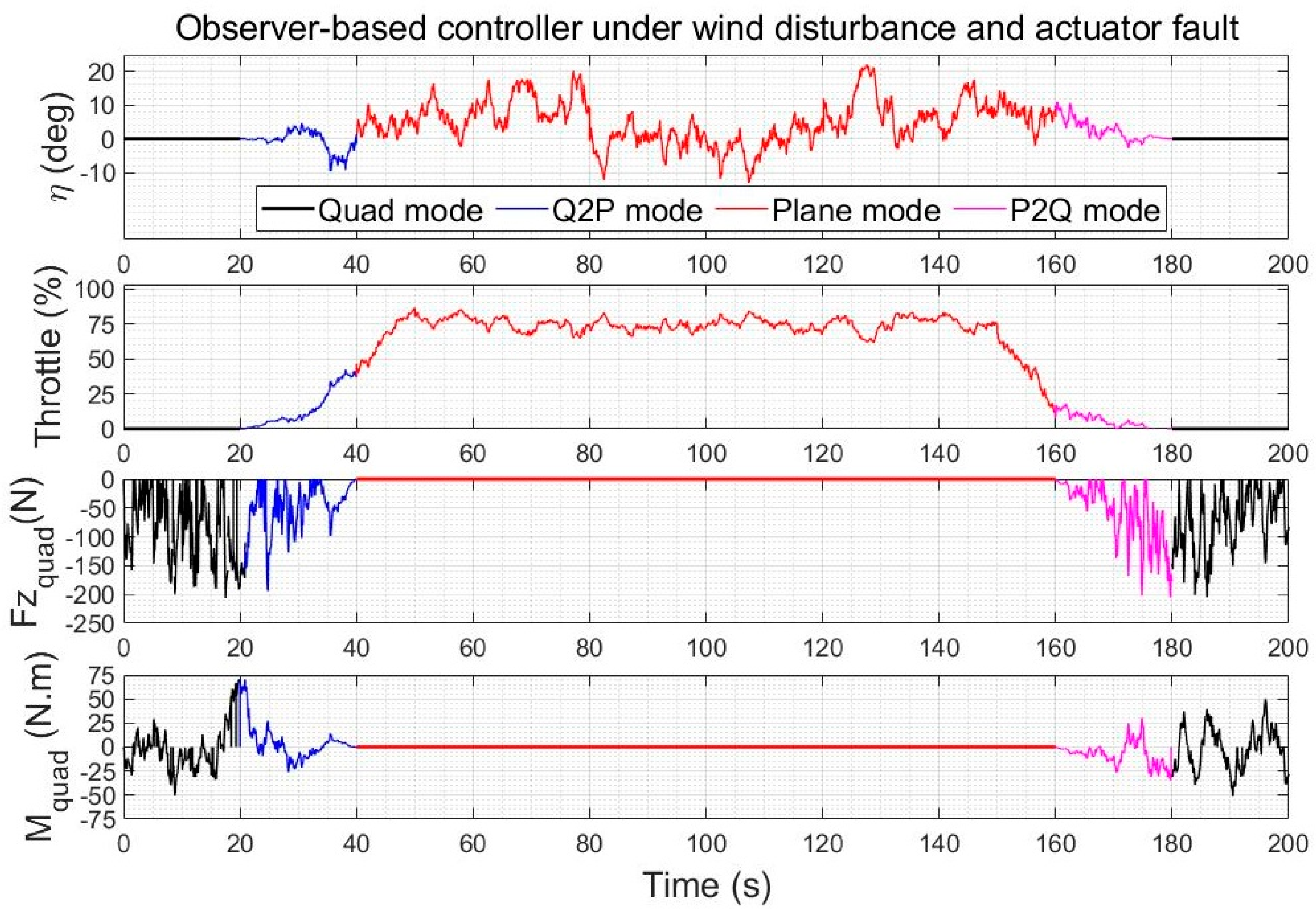
5.3.2. Control Effort Comparison under Wind Gusts and Faults
5.4. Discussion of Implementation Considerations and Extensions of the Approach
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Precedence Research. Unmanned Aerial Vehicle Market. Available online: https://www.precedenceresearch.com/unmanned-aerial-vehicle-market (accessed on 6 July 2022).
- Li, F.; Song, W.P.; Song, B.F.; Jiao, J. Dynamic Simulation and Conceptual Layout Study on a Quad-Plane in VTOL Mode in Wind Disturbance Environment. Int. J. Aerosp. Eng. 2022, 2022, 5867825. [Google Scholar]
- Nguyen, N.P.; Mung, N.X.; Hong, S.K. Actuator Fault Detection and Fault-Tolerant Control for Hexacopter. Sens. 2019, 19, 4721. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, N.P.; Huynh, T.T.; Do, X.P.; Mung, N.X.; Hong, S.K. Robust Fault Estimation Using the Intermediate Observer: Application to the Quadcopter. Sens. 2020, 20, 4917. [Google Scholar] [CrossRef]
- Karssies, H.J.; de Wagter, C. Extended Incremental Non-Linear Control Allocation (XINCA) for Quadplanes. Int. J. Micro Air Veh. 2022, 14, 1–11. [Google Scholar]
- Wang, X.; Sun, S. Incremental Fault-Tolerant Control for a Hybrid Quad-Plane UAV Subjected to a Complete Rotor Loss. Aerosp. Sci. Technol. 2022, 125, 107105. [Google Scholar] [CrossRef]
- Cristofaro, A.; Johansen, T.A. An Unknown Input Observer Approach to Icing Detection for Unmanned Aerial Vehicles with Linearised Longitudinal Motion. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; Volume 2015, pp. 207–213. [Google Scholar]
- Rotondo, D.; Cristofaro, A.; Johansen, T.A.; Nejjari, F.; Puig, V. Diagnosis of Icing and Actuator Faults in UAVs Using LPV Unknown Input Observers. J. Intell. Robot. Syst. Theory Appl. 2018, 91, 651–665. [Google Scholar] [CrossRef]
- Brossard, M.; Condomines, J.P.; Bonnabel, S. Tightly Coupled Navigation and Wind Estimation for Mini UAVs. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, AIAA 2018-1843, Kissimee, FL, USA, 8–12 January 2018; pp. 1–20. [Google Scholar]
- Hajiyev, C.; Cilden-Guler, D.; Hacizade, U. Two-Stage Kalman Filter for Fault Tolerant Estimation of Wind Speed and UAV Flight Parameters. Meas. Sci. Rev. 2020, 20, 35–42. [Google Scholar] [CrossRef]
- He, G.; Yu, L.; Huang, H.; Wang, X. A Nonlinear Robust Sliding Mode Controller with Auxiliary Dynamic System for the Hovering Flight of a Tilt Tri-Rotor UAV. Appl. Sci. 2020, 10, 6551. [Google Scholar]
- Mallavalli, S.; Fekih, A. A Fault Tolerant Tracking Control for a Quadrotor UAV Subject to Simultaneous Actuator Faults and Exogenous Disturbances. Int. J. Control 2020, 93, 655–668. [Google Scholar] [CrossRef]
- Chen, Z.; Jia, H. Design of Flight Control System for a Novel Tilt-Rotor UAV. Complexity 2020, 2020, 4757381. [Google Scholar] [CrossRef]
- Deng, Z.; Wu, L.; You, Y. Modeling and Design of an Aircraft-Mode Controller for a Fixed-Wing VTOL UAV. Math. Probl. Eng. 2021, 2021, 7902134. [Google Scholar] [CrossRef]
- Mathur, A.; Atkins, E.M. Design, Modeling and Hybrid Control of a Quadplane. In Proceedings of the AIAA Scitech 2021 Forum, AIAA 2021-0374, Virtual event, 11–15, 19–21 January 2021. [Google Scholar]
- Gu, H.; Lyu, X.; Li, Z.; Shen, S.; Zhang, F. Development and Experimental Verification of a Hybrid Vertical Take-off and Landing (VTOL) Unmanned Aerial Vehicle (UAV). In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems, ICUAS 2017, Miami, FL, USA, 13–16 June 2017; pp. 160–169. [Google Scholar]
- Gunarathna, J.K.; Munasinghe, R. Development of a Quad-Rotor Fixed-Wing Hybrid Unmanned Aerial Vehicle. In Proceedings of the MERCon 2018—4th International Multidisciplinary Moratuwa Engineering Research Conference, Moratuwa, Sri Lanka, 30 May–1 June 2018; pp. 72–77. [Google Scholar]
- Ducard, G.J.J.; Allenspach, M. Review of Designs and Flight Control Techniques of Hybrid and Convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar]
- Liang, J.; Fei, Q.; Wang, B.; Geng, Q. Tailsitter VTOL Flying Wing Aircraft Attitude Control. In Proceedings of the 31st Youth Academic Annual Conference of Chinese Association of Automation, YAC 2016, Wuhan, China, 11–13 November 2016; pp. 439–443. [Google Scholar]
- Zhang, J.; Guo, Z.; Wu, L. Research on Control Scheme of Vertical Take-off and Landing Fixed-Wing UAV. In Proceedings of the 2017 2nd Asia-Pacific Conference on Intelligent Robot Systems, ACIRS 2017, Wuhan, China, 16–19 June 2017; pp. 200–204. [Google Scholar]
- Chen, C.; Zhang, J.; Zhang, D.; Shen, L. Control and Flight Test of a Tilt-Rotor Unmanned Aerial Vehicle. Int. J. Adv. Robot. Syst. 2017, 14, 1–12. [Google Scholar]
- Sobiesiak, L.A.; Fortier-Topping, H.; Beaudette, D.; Bolduc-Teasdale, F.; de Lafontaine, J.; Nagaty, A.; Neveu, D.; Rancourt, D. Modelling and Control of Transition Flight of an EVTOL Tandem Tilt-Wing Aircraft. In Proceedings of the 8th European Conference for Aeronautics and Aerospace Sciences, EUCASS 2019, Madrid, Spain, 1–4 July 2019; pp. 1–14. [Google Scholar]
- Çakıcı, F.; Leblebicioğlu, M.K. Design and Analysis of a Mode-Switching Micro Unmanned Aerial Vehicle. Int. J. Micro Air Veh. 2016, 8, 221–229. [Google Scholar]
- Gunarathna, J.; Munasinghe, R. Simultaneous Execution of Quad and Plane Flight Modes for Efficient Take-Off of Quad-Plane Unmanned Aerial Vehicles. Appl. Sci. 2021, 1. [Google Scholar]
- Flores, G.R.; Escareño, J.; Lozano, R.; Salazar, S. Quad-Tilting Rotor Convertible MAV: Modeling and Real-Time Hover Flight Control. J. Intell. Robot. Syst. Theory Appl. 2012, 65, 457–471. [Google Scholar] [CrossRef]
- Yuksek, B.; Inalhan, G. Transition Flight Control System Design for Fixed-Wing VTOL UAV: A Reinforcement Learning Approach. In Proceedings of the AIAA Science and Technology Forum and Exposition, AIAA SciTech Forum 2022, AIAA 2022-0879, San Diego, CA, USA, 3–7 January 2022; pp. 1–16. [Google Scholar]
- Van Vu, D.; Nguyen, T.T.; Mai, S.X.; Nguyen, D.T. A Robust Transition Control Law for a QuadPlane. In Proceedings of the 2022 International Conference on Electronics, Information, and Communication (ICEIC), Jeju, Republic of Korea, 6 February 2022; pp. 1–4. [Google Scholar]
- Prochazka, K.F.; Stomberg, G. Integral Sliding Mode Based Model Reference FTC of an Over-Actuated Hybrid UAV Using Online Control Allocation. In Proceedings of the American Control Conference, Denver, CO, USA, 1–3 July 2020; pp. 3858–3864. [Google Scholar]
- Kringeland, T. Modelling and Control of a Vertical Take-Off and Landing Fixed-Wing Unmanned Aerial Vehicle. Master’s Thesis, University of Oslo, Oslo, Norway, 2019. Available online: https://www.duo.uio.no/bitstream/handle/10852/69780/MastersThesis_Torbj-rn_Kringeland.pdf (accessed on 16 January 2023).
- Zhao, H.; Xia, Y.; Ma, D.; Hao, C.; Yu, F. Active Disturbance Rejection Altitude Control for a QuadPlane. In Advances in Guidance, Navigation and Control; Springer: Singapore, 2022. [Google Scholar]
- Gong, S.; Ye, Z.; Wang, Z.; Guo, T.; Zhang, C. A Linear Active Disturbance-Rejection Based Vertical Takeoff and Acceleration Strategy with Simplified Vehicle Operations for Electric Vertical Takeoff and Landing Vehicles. Mathematics 2022, 10, 3333. [Google Scholar] [CrossRef]
- Zhenxing, G.; Hongbin, G. Generation and Application of Spatial Atmospheric Turbulence Field in Flight Simulation. Chin. J. Aeronaut. 2009, 22, 9–17. [Google Scholar]
- Li, F.; Song, W.P.; Song, B.F.; Zhang, H. Dynamic Modeling, Simulation, and Parameter Study of Electric Quadrotor System of Quad-Plane UAV in Wind Disturbance Environment. Int. J. Micro Air Veh. 2021, 13, 9–17. [Google Scholar]
- Cole, K. Reactive Trajectory Generation and Formation Control for Groups of UAVs. Ph.D. Thesis, The George Washington University, Washisnton, DC, USA, 2018. Available online: https://scholarspace.library.gwu.edu/concern/parent/bn9997056/file_sets/zg64tm28n (accessed on 28 May 2022).
- Anderson, D. Active Control of Turbulence-Induced Helicopter Vibration. University of Glasgow: Glasgow, UK, 1999. Available online: https://theses.gla.ac.uk/2175/ (accessed on 30 March 2022).
- Ichwanul Hakim, T.M.; Arifianto, O. Implementation of Dryden Continuous Turbulence Model into Simulink for LSA-02 Flight Test Simulation. J. Phys. Conf. Ser. 2018, 1005, 123–132. [Google Scholar]
- Stroe, G.; Andrei, C. Analysis Regarding the Effects of Atmospheric Turbulence on Aircraft Dynamics. INCAS Bull. 2016, 8, 123. [Google Scholar]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012; ISBN 9780691149219. [Google Scholar]
- Giap, V.N.; Huang, S.C.; Nguyen, Q.D.; Trinh, X.T. Time Varying Disturbance Observer Based on Sliding Mode Control for Active Magnetic Bearing System. In Lecture Notes in Mechanical Engineering; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Giap, V.N.; Huang, S.C. Effectiveness of Fuzzy Sliding Mode Control Boundary Layer Based on Uncertainty and Disturbance Compensator on Suspension Active Magnetic Bearing System. J. Meas. Control. 2020, 53, 934–942. [Google Scholar]
- Zhou, K.; Doyle, J.C. Essentials of Robust Control, 1st ed.; Pearson: London, UK, 1997; ISBN 9780135258330. [Google Scholar]



















| Perturbation Observer Gain | IAE | ||
|---|---|---|---|
| Low Wind Intensity | High Wind Intensity | ||
| No observer correction | Velocity tracking | 7.974 | 18.12 |
| Altitude tracking | 162.6 | 266.2 | |
| k = 1 | Velocity tracking | 4.535 | 9.628 |
| Altitude tracking | 126.7 | 173.2 | |
| k = 5 | Velocity tracking | 2.501 | 4.214 |
| Altitude tracking | 113.8 | 125.1 | |
| k = 10 | Velocity tracking | 2.087 | 2.945 |
| Altitude tracking | 110.9 | 117.3 | |
| k = 100 | Velocity tracking | 1.753 | 1.844 |
| Altitude tracking | 108 | 110 | |
| Estimated Disturbance Input | Observer | Comparison with Equivalent Observer Gains | Comparison When Alternative Observers Are Allowed Higher Gains | ||
|---|---|---|---|---|---|
| Observer Gain k | Disturbance Estimation IAE | Observer Gain k | Disturbance Estimation IAE | ||
| ug | AVOECR | 100 | 2.352 | 100 | 2.352 |
| OEIO | 100 | 66.55 | 500 | 12.12 | |
| RAMO | 100 | 108 | 500 | 34.47 | |
| AVSMO | 50 | 105.1 | 100 | 53.13 | |
| wg | AVOECR | 100 | 9.198 | 100 | 9.198 |
| OEIO | 100 | 83.07 | 500 | 77.49 | |
| RAMO | 100 | 128.7 | 500 | 53.1 | |
| AVSMO | 50 | 128.8 | 100 | 80.56 | |
| Elevator fault | AVOECR | 100 | 0.3934 | 100 | 0.3934 |
| OEIO | 100 | 0.8946 | 500 | 3.646 | |
| RAMO | 100 | 0.7922 | 500 | 2.2153 | |
| AVSMO | 50 | 1.4630 | 100 | 1.481 | |
| Controller | Altitude IAE | Velocity IAE |
|---|---|---|
| LQR | 653.2 | 172 |
| LQR with AVOECR | 148.6 | 37.8 |
| LQR with OEIO | 193.6 | 49.93 |
| LQR with RAMO | 215.6 | 74.8 |
| LQR with AVSMO | 216.4 | 92.1 |
| Controller | Altitude IAE | Velocity IAE |
|---|---|---|
| H∞ controller | 867.65 | 224.2 |
| H∞ with AVOECR | 254.81 | 56.6 |
| H∞ with OEIO | 272.64 | 72.28 |
| H∞ with RAMO | 332.4 | 115.9 |
| H∞ with AVSMO | 411.8 | 143.51 |
| , ith Element of u | Integrated Absolute Value of the Control Input | |
|---|---|---|
| LQR | LQR with AVOECR Observer-Based Wind Disturbance Compensation | |
| Plane elevator (i = 1) | 915.7 | 959.8 |
| Plane Throttle (i = 2) | 5528 | 5530 |
| Quad thrust (i = 3) | 6326 | 6986 |
| Quad pitching moment (i = 4) | 1024 | 1156 |
| , ith Element of u | Integrated Absolute Value of the Control Input | |
|---|---|---|
| LQR | LQR with AVOECR Observer-Based Disturbance and Fault Compensation | |
| Plane elevator (i = 1) | 922.8 | 963.1 |
| Plane Throttle (i = 2) | 5525 | 5530 |
| Quad thrust (i = 3) | 6337 | 7094 |
| Quad pitching moment (i = 4) | 1024 | 1161 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zyadat, Z.; Horri, N.; Innocente, M.; Statheros, T. Observer-Based Optimal Control of a Quadplane with Active Wind Disturbance and Actuator Fault Rejection. Sensors 2023, 23, 1954. https://doi.org/10.3390/s23041954
Zyadat Z, Horri N, Innocente M, Statheros T. Observer-Based Optimal Control of a Quadplane with Active Wind Disturbance and Actuator Fault Rejection. Sensors. 2023; 23(4):1954. https://doi.org/10.3390/s23041954
Chicago/Turabian StyleZyadat, Zaidan, Nadjim Horri, Mauro Innocente, and Thomas Statheros. 2023. "Observer-Based Optimal Control of a Quadplane with Active Wind Disturbance and Actuator Fault Rejection" Sensors 23, no. 4: 1954. https://doi.org/10.3390/s23041954