



Temperature Drift Compensation of a MEMS Accelerometer Based on DLSTM and ISSA

(This article belongs to the Section Navigation and Positioning)
Abstract
:1. Introduction
2. Temperature Experiment
2.1. Experimental Product
2.2. Experimental Scheme
- As is shown in Figure 1b, the GNC Module is placed in a temperature-controlled oven with a static base The accelerometer chosen in this paper has axes perpendicular to the local gravity direction. The function of the static base is to ensure that the product on it is not disturbed by the vibration of the external environment;
- At the beginning of the experiment, the temperature of the temperature-controlled oven is set to −40 °C and maintained for 1 h;
- The temperature of the temperature-controlled oven is raised to 80 °C at a heating rate of 1 °C/min. At the beginning of this step, a computer outside the temperature-controlled oven synchronously collected the MEMS accelerometer’s output with a frequency of 200 Hz until the end of the heating process;
- The temperature of the temperature-controlled oven is maintained at 80 °C for 1 h;
- Then the temperature of the temperature-controlled oven is brought down to room temperature. The temperature experiment is over.
3. Model and Algorithm
3.1. Neural Network Methods
3.1.1. Real-Time Compensatiom Model
3.1.2. LSTM and DLSTM
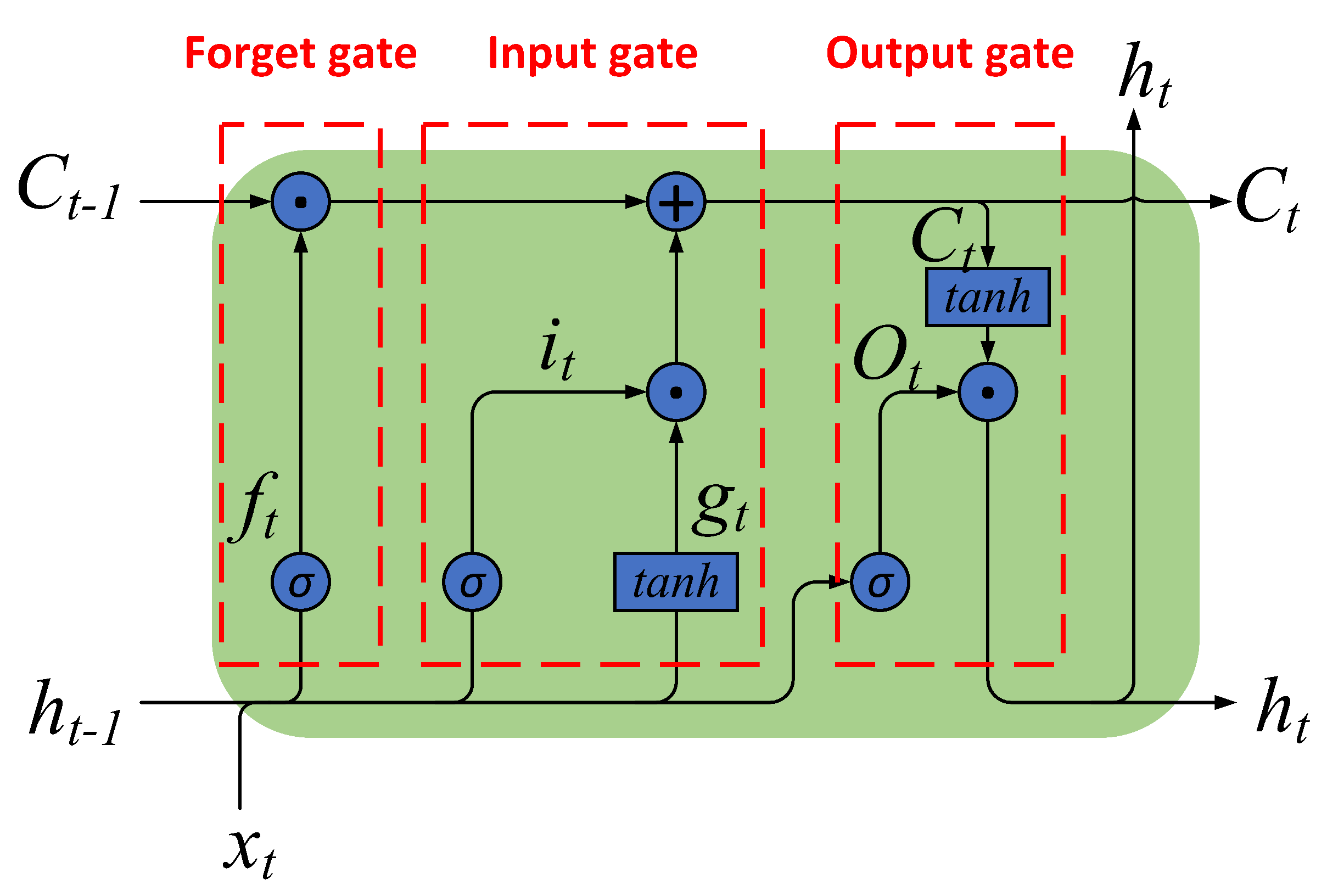
- LSTMLSTM was proposed by Hochreiter and Schmidhuber in 1997 and is a popular variant of RNN [34]. The framework of LSTM is shown in Figure 3.LSTM is built with a “gate” structure and a cell unit. Three gate units in LSTM adjust the information flow within the unit adaptively, called forget gate, input gate, and output gate. The cell can remember values over arbitrary time intervals [34,35,36]. The equations of the LSTM are described below.The sigmoid function implements the forget gate, which determines the information to be discarded from the cell state. The output of the forget gate ranges from zero to one, representing the forgetting degree of each input in the cell state. The smaller the forget gate output, the more information is forgotten. Its equation can be described as Formula (2).where and are the input of the forget gate, and are the coefficients of and , respectively, is the threshold of forget gate, is the sigmoid function, is the output of forget at time t, and is the output of LSTM at time t.The second part is the input gate, which determines the new information to be stored in the current cell state. The input gate consists of two parts. The first is the sigmoid function that decides the value to update. Similar to the forget gate, the output of the sigmoid function represents the updating degree of each input. The second is the tanh function that creates a new candidate value . Both outputs are added to the cell state after a pointwise multiplication operation. Its equation can be described as Formulas (3) and (4).where tan is the tanh funtion. The meanings of other parameters are similar to the previous ones.The last part is the output gate, which decides what information to output. The function of the sigmoid function is similar to the previous which decides the output degree of each input. The cell state is put through a tanh function and then pointwise multiplication with as the output of LSTM. Its equation can be described as Formulas (5)–(7).where is the cell state at time t, and ⨀ represents the point-wise multiplication operation. The meanings of other parameters are similar to the previous ones.The above analysis shows that and are the input and output of LSTM, respectively; , , , and are intermediate variables in the calculation process; , , , , , , , , , , , and are the weights determined in the training process; and are activation functions; records the cell state at time t, which is initialized as 0.
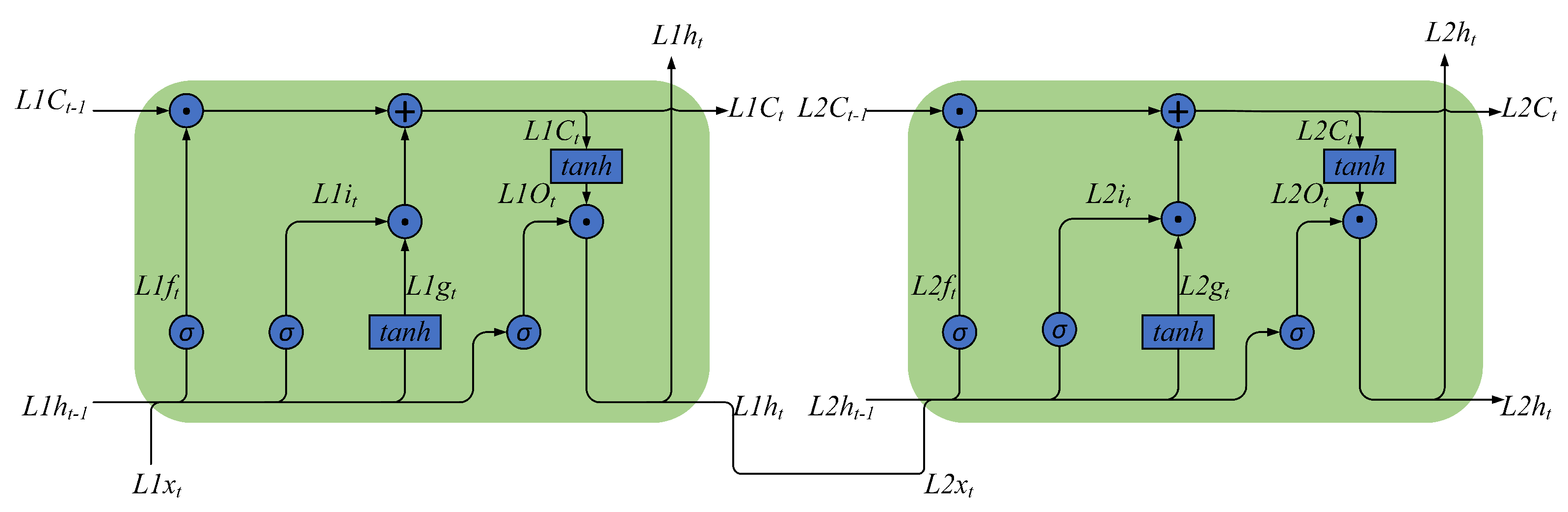
- DLSTMFigure 3 and Formulas (2)–(7) describe a single-layer LSTM. Figure 4 describes a two-layer DLSTM. In the two-layer DLSTM, the first-layer LSTM’s output is passed to the second-layer LSTM and used as input. The input vector goes through the two-layer DLSTM layer by layer to jointly determine the output of the two-layer DLSTM.In general, DLSTM is a sequence LSTM that decides the output together. Its structure is shown in Figure 5.
3.1.3. SSA and ISSA
- SSASSA is a swarm intelligence optimization algorithm inspired by the foraging and anti-predation behaviors of sparrow populations, which Xue proposed in 2020 [37]. It has strong optimization capabilities and fast efficiency and was widely welcomed as soon as it was proposed. After simplifying and idealizing the biological characteristics of sparrow populations during foraging, the authors concluded the following rules.
- Sparrow populations typically divide during foraging into subpopulations called producers and scroungers. The criteria for classification are according to the fitness value of individual sparrows. Producers usually have better fitness values, while others are scroungers. Producers are primarily responsible for finding food and have larger search areas to provide foraging areas and directions for the entire sparrow population. Scroungers follow the producer’s location to find food;
- Some individuals in the population have a strong anti-predation ability, called scouters. When scouters detect danger, they will act against predation;
- Producers and scroungers can dynamically switch in each generation according to their fitness values, but the number of individuals in these two subpopulations remains the same;
- Some scroungers may monitor producers and compete for food, while some starving scroungers may look elsewhere for food;
- When aware of the danger, the fittest sparrow will randomly approach others, and others will move toward the best sparrow.
Assume that there are a total of N sparrow individuals in the population, each with d dimensions/elements. This sparrow population can be represented as an expression (8). Each row of the matrix represents a sparrow individual.The mathematical expression of SSA can be summarized as follows.Updating Producer Locationwhere is the j-th dimension of the i-th individual in the t-th iteration of the producers; , where d is the dimension of the sparrows; is largest number of iterations; is a random value in the range of ; Q is a random value from a normal distribution; is the alarm value; is the safety threshold; means there is no danger around the producer, and they will continue their extensive search; and means there is danger around the producer and they will fly to other safe areas.Updating Scroungers Locationwhere and are the j-th dimension of the individual with the best and worst fitness in the t-th iteration, respectively; n is the total number of sparrows; A is a d dimensional vector, each element of which is randomly 1 or , and ; L is a d dimensional vector, each element of which is a 1; means that the fitness of i-th scrounger is poor, it will fly to other places for food; and means that the i-th scrounger is likely to forage around the best individual.Updating Scouters Locationwhere is a random number that follows a normal distribution; K is a random number that obeys a uniform distribution and ; is a very small constant to ensure the denominator is not 0; ,, and are the i-th individual’s fitness, the best fitness, and the worst fitness in the t-th iteration, respectively; and and denote whether the sparrow is the individual with best fitness or not in the t-th iteration, respectively. When they feel danger, they follow Rule 5 to perform the corresponding actions, respectively. - ISSAAlthough the original SSA has strong optimization ability and fast efficiency, it easily falls into the local optimum [38,39,40]. The foraging area and direction of the entire sparrow population mainly depend on the producers, so we need to expand the exploration range of the producers to improve the foraging ability of the entire population. The improvement of ISSA mainly comes from the following three aspects.
- Introducing self-adaptive hyper-parameters to producers: In Formula (9), the update position of the producer is affected by . When is a random value, as i becomes larger, the value range of becomes , where . It is shown in Figure 6.We introduce the adaptive weight w shown by Formula (12) to improve the producer’s search speed and global search ability.where is initial weight; c is set to 0.9.
- We Introduce the Lévy flight (LF) mechanism, which is widely used to overcome the premature convergence problem [41,42]. In the LF algorithm, the random walk is used to tune local search capabilities. The formula of LF is shown in Formulas (14) and (15).where and are random numbers that obey a Gaussian distribution; ; and is Gamma function. After the introduction of the LF algorithm, Formulas (13) and (10) are changed to (16) and (17)
- The sparrow individuals with the best fitness are directly passed on to the next generation. Its purpose is to ensure that the population’s overall quality does not decline.
The workflow of ISSA is similar to SSA. The difference is that producers and scroungers obey different formulas in SSA and ISSA, respectively. Moreover, the individual with the best fitness in the last generation replaces the individual with the worst fitness in the current generation in ISSA. Here, we present the workflow by the example of ISSA. The workflow of ISSA is shown in Figure 7.
3.1.4. Fusion Algorithm
- We randomly generate N groups values as the initial parameters of DLSTM. Each group of parameters represents a solution of DLSTM. Each group of parameters contains d elements, where d is the total number of parameters. These N groups of parameters have the same form as expression (8) and are used to train the DLSTM.
- We train the DLSTM until the ending condition one is met; that is, the accuracy of the DLSTM meets requirements or reaches preset cycles of the DLSTM training. At this time, new N group parameters are obtained. If the accuracy meets the requirements, we finish training and export the optimal parameters. Otherwise, new N groups of parameters constitute the initial population of the ISSA.
- The ISSA is used to evaluate and improve the parameters in the population further until ending condition two is met. That is, the accuracy of the DLSTM meets the requirements or reaches preset cycles of the ISSA.
- We export the optimal results.
3.2. PLA Method
3.2.1. PLA Model
3.2.2. PLA Algorithm
4. Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MEMS | Micro-electro-mechanical system |
| DLSTM | Deep Long Short-term Memory Recurrent Neural Network |
| SSA | Sparrow Search Algorithm |
| ISSA | Improved Sparrow Search Algorithm |
| TDO | temperature drift output |
| IMU | Inertial Measurement Unit |
| BP NN | back propagation neural network |
| AGA | adaptive genetic algorithm |
| GA | genetic algorithm |
| PSO | particle swarm optimization |
| RBF NN | radial basis function neural networks |
| GNC | guidance navigation and control |
| PLA | piecewise linear approximation |
| TDE | temperature drift error |
| KF | Kalman filter |
| AFS | artificial fish swarm |
| LF | Lévy flight |
References
- Zhao, W.; Cheng, Y.; Zhao, S.; Hu, X.; Rong, Y.; Duan, J.; Chen, J. Navigation grade MEMS IMU for a satellite. Micromachines 2021, 12, 151. [Google Scholar] [CrossRef] [PubMed]
- de Alteriis, G.; Conte, C.; Moriello, R.S.L.; Accardo, D. Use of consumer-grade MEMS inertial sensors for accurate attitude determination of drones. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 534–538. [Google Scholar]
- Chang, H.C.; Hsu, Y.L.; Yang, S.C.; Lin, J.C.; Wu, Z.H. A wearable inertial measurement system with complementary filter for gait analysis of patients with stroke or Parkinson’s disease. IEEE Access 2016, 4, 8442–8453. [Google Scholar] [CrossRef]
- Qiu, S.; Liu, L.; Zhao, H.; Wang, Z.; Jiang, Y. MEMS inertial sensors based gait analysis for rehabilitation assessment via multi-sensor fusion. Micromachines 2018, 9, 442. [Google Scholar] [CrossRef]
- Kos, M.; Kramberger, I. A wearable device and system for movement and biometric data acquisition for sports applications. IEEE Access 2017, 5, 6411–6420. [Google Scholar] [CrossRef]
- Russo, C.; Mocera, F.; Somà, A. MEMS sensors for sport engineer applications. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Genova, Italy, 2–5 September 2020; Volume 1038, p. 012056. [Google Scholar]
- Johnston, W.; O’Reilly, M.; Argent, R.; Caulfield, B. Reliability, validity and utility of inertial sensor systems for postural control assessment in sport science and medicine applications: A systematic review. Sport. Med. 2019, 49, 783–818. [Google Scholar] [CrossRef]
- Hoang, M.L.; Carratù, M.; Paciello, V.; Pietrosanto, A. Body temperature—Indoor condition monitor and activity recognition by MEMS accelerometer based on IoT-alert system for people in quarantine due to COVID-19. Sensors 2021, 21, 2313. [Google Scholar] [CrossRef]
- Fu, Z.; Zhang, G.; Lin, Y.; Liu, Y.; Tan, J. Calibration and compensation of inertial sensor errors in portable applications—A review. In Proceedings of the 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, UK, 31 August–2 September 2016; pp. 1–4. [Google Scholar]
- Wang, Y.; Zhang, J.; Yao, Z.; Lin, C.; Zhou, T.; Su, Y.; Zhao, J. A MEMS resonant accelerometer with high performance of temperature based on electrostatic spring softening and continuous ring-down technique. IEEE Sens. J. 2018, 18, 7023–7031. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, T. Parasitic resistance-based high precision capacitive MEMS accelerometer phase shift and its usage for temperature compensation. IEEE Sens. J. 2017, 18, 629–634. [Google Scholar] [CrossRef]
- Tsai, M.H.; Liu, Y.C.; Liang, K.C.; Fang, W. Monolithic CMOS—MEMS pure oxide tri-axis accelerometers for temperature stabilization and performance enhancement. J. Microelectromech. Syst. 2015, 24, 1916–1927. [Google Scholar] [CrossRef]
- Zotov, S.A.; Simon, B.R.; Trusov, A.A.; Shkel, A.M. High quality factor resonant MEMS accelerometer with continuous thermal compensation. IEEE Sens. J. 2015, 15, 5045–5052. [Google Scholar] [CrossRef]
- Jing, Z.; Anping, Q.; Qin, S.; You, B.; Guoming, X. Research on temperature compensation method of silicon resonant accelerometer based on integrated temperature measurement resonator. In Proceedings of the 2015 12th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Qingdao, China, 16–18 July 2015; Volume 3, pp. 1577–1581. [Google Scholar]
- Kose, T.; Azgin, K.; Akin, T. Temperature compensation of a capacitive MEMS accelerometer by using a MEMS oscillator. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 February 2016; pp. 33–36. [Google Scholar]
- Ma, M.j.; Jin, Z.h.; Zhu, H.j. A combined modulated feedback and temperature compensation approach to improve bias drift of a closed-loop MEMS capacitive accelerometer. Front. Inf. Technol. Electron. Eng. 2015, 16, 497–510. [Google Scholar] [CrossRef]
- Zhang, T.; Ma, Z.; Jin, Y.; Ye, Z.; Zheng, X.; Jin, Z. Temperature drift compensation of a tuned low stiffness MEMS accelerometer based on double-sided parallel plates. In Proceedings of the 2022 IEEE 17th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Taoyuan, Taiwan, 14–17 April 2022; pp. 249–252. [Google Scholar]
- Parmar, Y.; Dutta, S.; Pal, R.; Jain, K.K. Temperature Compensation of MEMS Capacitive Accelerometer for Navigational Application. In The Physics of Semiconductor Devices. IWPSD 2017; Springer: Cham, Switzerland, 2017; pp. 839–844. [Google Scholar]
- He, J.; Xie, J.; He, X.; Du, L.; Zhou, W. Analytical study and compensation for temperature drifts of a bulk silicon MEMS capacitive accelerometer. Sens. Actuators A Phys. 2016, 239, 174–184. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. Thermal compensation of low-cost MEMS accelerometers for tilt measurements. Sensors 2018, 18, 2536. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, X.; Gao, Y.; Cretu, E. Analytical study and thermal compensation for capacitive MEMS accelerometer with anti-spring structure. J. Microelectromech. Syst. 2020, 29, 1389–1400. [Google Scholar] [CrossRef]
- Khankalantary, S.; Ranjbaran, S.; Ebadollahi, S. Simplification of calibration of low-cost MEMS accelerometer and its temperature compensation without accurate laboratory equipment. Meas. Sci. Technol. 2021, 32, 045102. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuators A Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- Han, Z.; Hong, L.; Meng, J.; Li, Y.; Gao, Q. Temperature drift modeling and compensation of capacitive accelerometer based on AGA-BP neural network. Measurement 2020, 164, 108019. [Google Scholar] [CrossRef]
- Qi, B.; Shi, S.; Zhao, L.; Cheng, J. A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis. Micromachines 2022, 13, 835. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Pang, L.; Xiao, Z.; Shen, C.; Cao, H.; Shi, Y.; Liu, J. Temperature drift compensation for High-G MEMS accelerometer based on RBF NN improved method. Appl. Sci. 2019, 9, 695. [Google Scholar] [CrossRef]
- Du, J.; Guo, Y.; Lin, Y.; Zheng, X.; Jin, Z. A real-time temperature compensation algorithm for a force-rebalanced MEMS capacitive accelerometer based on resonant frequency. In Proceedings of the 2017 IEEE 12th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Los Angeles, CA, USA, 9–12 April 2017; pp. 214–217. [Google Scholar]
- Han, D.; Bai, J.; Lu, Q.; Lou, S.; Jiao, X.; Yang, G. The analysis of temperature effect and temperature compensation of MOEMS accelerometer based on a grating interferometric cavity. In Proceedings of the Interferometry XVIII, San Diego, CA, USA, 28 August–1 September 2016; Volume 9960, pp. 288–294. [Google Scholar]
- Yang, W.; Fang, B.; Tang, Y.Y.; Qin, X. A temperature compensation model for low cost quartz accelerometers and its application in tilt sensing. Math. Probl. Eng. 2016, 2016, 2950376. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.; Li, L.; Ren, C.; Luo, H. Study on the compensation for a quartz accelerometer based on a wavelet neural network. Meas. Sci. Technol. 2010, 21, 105202. [Google Scholar] [CrossRef]
- Li, X.F.; Li, D.H.; Gao, J.M.; Pang, M.S. Temperature drift compensation algorithm based on BP and GA in quartzes flexible accelerometer. In Proceedings of the Applied Mechanics and Materials, Macau, China, 14–15 November 2012; Volume 249, pp. 95–99. [Google Scholar]
- Yu, X.D.; Li, J.L.; Yan, S.K.; Wei, G.; Li, G. Temperature drift compensation based on artificial fish swarm algorithm for quartz flexible accelerometer. In Proceedings of the Applied Mechanics and Materials, Xi’an, China, 11–12 January 2014; Volume 513, pp. 4030–4034. [Google Scholar]
- Wu, J.; Huang, T.; Zhu, Z.; Song, K. Cold starting temperature time-related compensation model of inertial sensors based on particle swarm optimization algorithm. Rev. Sci. Instrum. 2021, 92, 065106. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Chen, S.; Chen, Y.; Zhang, B.; Feng, Z.; Zhou, H.; Bo, Y. A MEMS IMU de-noising method using long short term memory recurrent neural networks (LSTM-RNN). Sensors 2018, 18, 3470. [Google Scholar] [CrossRef] [PubMed]
- Guanwu, Z.; Qinghong, Z. Prediction of Quartz Differential Resonant Accelerometer Zero-bias Based on Long Short Term Memory Neural Networks. In Proceedings of the 2021 6th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 9–11 April 2021; pp. 1423–1426. [Google Scholar]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Zhu, Y.; Yousefi, N. Optimal parameter identification of PEMFC stacks using adaptive sparrow search algorithm. Int. J. Hydrogen Energy 2021, 46, 9541–9552. [Google Scholar] [CrossRef]
- Liu, G.; Shu, C.; Liang, Z.; Peng, B.; Cheng, L. A modified sparrow search algorithm with application in 3d route planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Z.; Wu, L.; Badami, B. Optimal brain tumor diagnosis based on deep learning and balanced sparrow search algorithm. Int. J. Imaging Syst. Technol. 2021, 31, 1921–1935. [Google Scholar] [CrossRef]
- Jensi, R.; Jiji, G.W. An enhanced particle swarm optimization with levy flight for global optimization. Appl. Soft Comput. 2016, 43, 248–261. [Google Scholar] [CrossRef]
- Haklı, H.; Uğuz, H. A novel particle swarm optimization algorithm with Levy flight. Appl. Soft Comput. 2014, 23, 333–345. [Google Scholar] [CrossRef]
- Miao, Z.; Shen, F.; Xu, D.; Tian, C.; He, K. Online estimation method of Allan variance coefficients for MEMS IMU. J. Instrum. 2014, 9, P09001. [Google Scholar] [CrossRef]
- Chong, S.; Rui, S.; Jie, L.; Xiaoming, Z.; Jun, T.; Yunbo, S.; Jun, L.; Huiliang, C. Temperature drift modeling of MEMS gyroscope based on genetic-Elman neural network. Mech. Syst. Signal Process. 2016, 72, 897–905. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Validation Data | DLSTM | Improvement (%) | DLSTM + SSA | Improvement (%) | DLSTM + ISSA | Improvement (%) | PLA | Improvement (%) | |
|---|---|---|---|---|---|---|---|---|---|
| B (mg) | 87.16 | 88.35 | 94.89 | 3.29 | |||||
| 90.33 | 92.16 | 97.37 | 20.23 | ||||||
| 90.59 | 92.05 | 97.77 | 30.31 | ||||||
| Aver (%) | 89.36 | 90.85 | 96.68 | 17.94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, G.; Chai, B.; Cheng, R.; Wang, Y. Temperature Drift Compensation of a MEMS Accelerometer Based on DLSTM and ISSA. Sensors 2023, 23, 1809. https://doi.org/10.3390/s23041809
Guo G, Chai B, Cheng R, Wang Y. Temperature Drift Compensation of a MEMS Accelerometer Based on DLSTM and ISSA. Sensors. 2023; 23(4):1809. https://doi.org/10.3390/s23041809
Chicago/Turabian StyleGuo, Gangqiang, Bo Chai, Ruichu Cheng, and Yunshuang Wang. 2023. "Temperature Drift Compensation of a MEMS Accelerometer Based on DLSTM and ISSA" Sensors 23, no. 4: 1809. https://doi.org/10.3390/s23041809