
An Overview of Wearable Haptic Technologies and Their Performance in Virtual Object Exploration
 , ,
, ,
Abstract
:1. Introduction
2. State of the Art/Aim
3. Materials and Methods
3.1. Search Strategy
3.2. Eligibility Criteria (Inclusion and Exclusion) and Study Selection
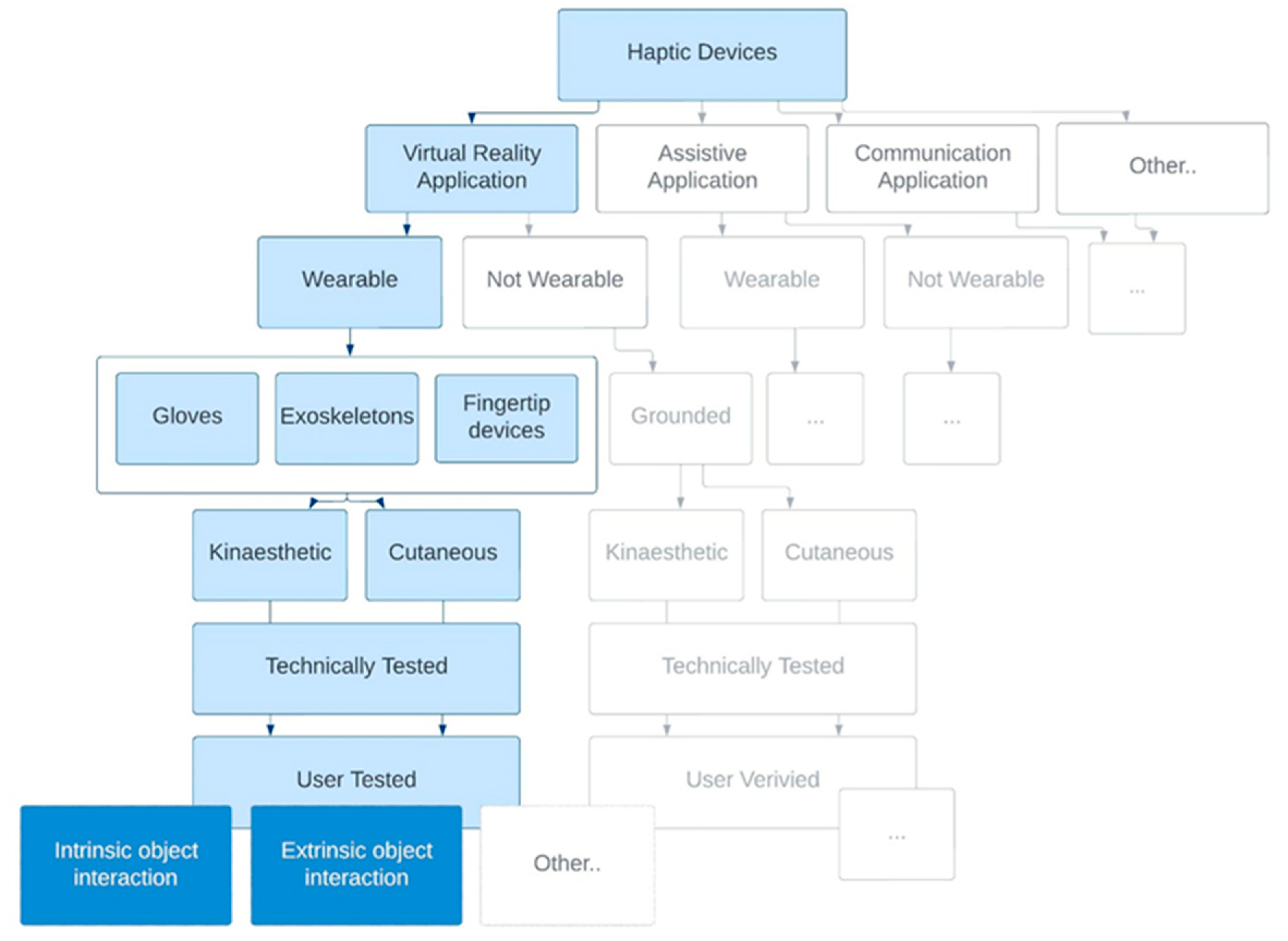
3.3. Overview Layout
4. Results
4.1. Texture Exploration
4.2. Thermal Quality Exploration
4.3. Compliance Exploration
4.4. Weight Exploration
4.5. Shape Exploration
4.6. Orientation Exploration
5. Discussion
5.1. General
5.2. Future Recommendations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pereira, M.F.; Prahm, C.; Kolbenschlag, J.; Oliveira, E.; Rodrigues, N.F. Application of AR and VR in hand rehabilitation: A systematic review. J. Biomed. Inform. 2020, 111, 103584. [Google Scholar] [CrossRef]
- Markopoulos, E.; Markopoulos, P.; Laivuori, N.; Moridis, C.; Luimula, M. Finger tracking and hand recognition technologies in virtual reality maritime safety training applications. In Proceedings of the 11th IEEE International Conference on Cognitive Infocommunications, CogInfoCom, Mariehamn, Finland, 23–25 September 2020; pp. 000251–000258. [Google Scholar] [CrossRef]
- Mao, R.Q.; Lan, L.; Kay, J.; Lohre, R.; Ayeni, O.R.; Goel, D.P.; de Sa, D. Immersive Virtual Reality for Surgical Training: A Systematic Review. J. Surg. Res. 2021, 268, 40–58. [Google Scholar] [CrossRef]
- Cai, H.; Lin, T.; Chen, L.; Weng, H.; Zhu, R.; Chen, Y.; Cai, G. Evaluating the effect of immersive virtual reality technology on gait rehabilitation in stroke patients: A study protocol for a randomized controlled trial. Trials 2021, 22, 1–11. [Google Scholar] [CrossRef]
- Shahab, M.; Taheri, A.; Hosseini, S.R.; Mokhtari, M.; Meghdari, A.; Alemi, M.; Pouretemad, H.; Shariati, A.; Pour, A.G. Social Virtual Reality Robot (V2R): A Novel Concept for Education and Rehabilitation of Children with Autism. In Proceedings of the 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 25–27 October 2017; pp. 82–87. [Google Scholar] [CrossRef]
- de Oliveira, P.A.; Lotto, E.P.; Correa, A.G.D.; Taboada, L.G.G.; Costa, L.C.P.; Lopes, R.D. Virtual Stage: An Immersive Musical Game for People with Visual Impairment. In Proceedings of the 14th Brazilian Symposium on Games and Digital Entertainment, SBGAMES, Piaui, Brazil, 11–13 November 2015; pp. 135–141. [Google Scholar] [CrossRef]
- Srinivasan, M.A.; Basdogan, C. Haptics in virtual environments: Taxonomy, research status, and challenges. Comput. Graph. 1997, 21, 393–404. [Google Scholar] [CrossRef]
- Hatzfeld, C.; Kern, T.A. (Eds.) Engineering Haptic Devices: A Beginner’s Guide, 2nd ed.; Springer: London, UK, 2014. [Google Scholar] [CrossRef]
- Lederman, S.J.; Klatzky, R.L. Haptic perception: A tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef]
- Yem, V.; Kajimoto, H. Wearable tactile device using mechanical and electrical stimulation for fingertip interaction with virtual world. In Proceedings of the 2017 IEEE Virtual Reality (VR), Los Angeles, CA, USA, 18–22 March 2017; pp. 99–104. [Google Scholar] [CrossRef]
- Maisto, M.; Pacchierotti, C.; Chinello, F.; Salvietti, G.; De Luca, A.; Prattichizzo, D. Evaluation of Wearable Haptic Systems for the Fingers in Augmented Reality Applications. IEEE Trans. Haptics 2017, 10, 511–522. [Google Scholar] [CrossRef]
- Tanaka, Y.; Yamauchi, H.; Amemiya, K. Wearable haptic display for immersive virtu-al environment. Proc. JFPS Int. Symp. Fluid Power 2002, 2002, 309–314. [Google Scholar] [CrossRef]
- Sun, Y.; Yoshida, S.; Narumi, T.; Hirose, M. Handheld Haptic Interface for Rendering Size, Shape, and Stiffness of Virtual Objects. In Proceedings of the ISS 2018—2018 ACM International Conference on Interactive Surfaces and Spaces, Tokyo Japan, 25–28 November 2018; pp. 411–414. [Google Scholar] [CrossRef]
- Atapattu, S.H.; Senevirathna, N.M.; Shan, H.L.U.; Madusanka, T.B.T.; Lalitharatne, T.D.; Chathuranga, D.S. Design and development of a wearable haptic feedback device to recognize textured surfaces: Preliminary study. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM, Munich, Germany, 3–7 July 2017; pp. 16–21. [Google Scholar] [CrossRef]
- Giraud, F.H.; Joshi, S.; Paik, J. Haptigami: A Fingertip Haptic Interface with Vibrotactile and 3-DoF Cutaneous Force Feedback. IEEE Trans. Haptics 2021, 15, 131–141. [Google Scholar] [CrossRef]
- Choi, I.; Culbertson, H.; Miller, M.R.; Olwal, A.; Follmer, S. Grabity: A Wearable Haptic Interface for Simulating Weight and Grasping in Virtual Reality. In Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, Québec City, QC, Canada, 22–25 October 2017. [Google Scholar] [CrossRef]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef]
- Wee, C.; Yap, K.M.; Lim, W.N. Haptic Interfaces for Virtual Reality: Challenges and Research Directions. IEEE Access 2021, 9, 112145–112162. [Google Scholar] [CrossRef]
- Yin, J.; Hinchet, R.; Shea, H.; Majidi, C. Wearable Soft Technologies for Haptic Sensing and Feedback. Adv. Funct. Mater. 2020, 31, 2007428. [Google Scholar] [CrossRef]
- Ozioko, O.; Dahiya, R. Smart Tactile Gloves for Haptic Interaction, Communication, and Rehabilitation. Adv. Intell. Syst. 2021, 4, 2100091. [Google Scholar] [CrossRef]
- Caeiro-Rodríguez, M.; Otero-González, I.; Mikic-Fonte, F.; Llamas-Nistal, M. A Systematic Review of Commercial Smart Gloves: Current Status and Applications. Sensors 2021, 21, 2667. [Google Scholar] [CrossRef]
- Keef, C.V.; Kayser, L.V.; Tronboll, S.; Carpenter, C.W.; Root, N.B.; Finn, M.; O’Connor, T.F.; Abuhamdieh, S.N.; Davies, D.M.; Runser, R.; et al. Virtual Texture Generated Using Elastomeric Conductive Block Copolymer in a Wireless Multimodal Haptic Glove. Adv. Intell. Syst. 2020, 2, 2000018. [Google Scholar] [CrossRef]
- Li, S.; Tong, X.; Huang, J.; Wu, X.; Yang, W.; Pan, Z. A Thermal and Vibrational Feedback Glove Based on the Tactile Characteristics of Human Hand Skin. IEEE Access 2020, 8, 226671–226684. [Google Scholar] [CrossRef]
- Lee, Y.; Lee, S.; Lee, D. Wearable Haptic Device for Stiffness Rendering of Virtual Objects in Augmented Reality. Appl. Sci. 2021, 11, 6932. [Google Scholar] [CrossRef]
- Mo, Y.; Song, A.; Qin, H. Analysis and Performance Evaluation of a 3-DOF Wearable Fingertip Device for Haptic Applications. IEEE Access 2019, 7, 170430–170441. [Google Scholar] [CrossRef]
- Hosseini, M.; Sengul, A.; Pane, Y.; De Schutter, J.; Bruyninck, H. ExoTen-Glove: A Force-Feedback Haptic Glove Based on Twisted String Actuation System. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 320–327. [Google Scholar] [CrossRef]
- Maereg, A.T.; Nagar, A.; Reid, D.; Secco, E.L. Wearable Vibrotactile Haptic Device for Stiffness Discrimination during Virtual Interactions. Front. Robot. AI 2017, 4, 42. [Google Scholar] [CrossRef]
- Martinez, J.; Garcia, A.; Oliver, M.; Molina, J.P.; Gonzalez, P. Identifying Virtual 3D Geometric Shapes with a Vibrotactile Glove. IEEE Comput. Graph. Appl. 2014, 36, 42–51. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, M.; Lee, Y.; Kwon, J.; Park, Y.-L. Wearable Finger Tracking and Cutaneous Haptic Interface with Soft Sensors for Multi-Fingered Virtual Manipulation. IEEE/ASME Trans. Mechatronics 2018, 24, 67–77. [Google Scholar] [CrossRef]
- Hinchet, R.; Vechev, V.; Shea, H.; Hilliges, O. Dextres: Wearable haptic feedback for grasping in VR via a thin form-factor electrostatic brake. In Proceedings of theUIST 2018—Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, Berlin, Germany, 14 October 2018; pp. 901–912. [Google Scholar] [CrossRef]
- Gabardi, M.; Solazzi, M.; Leonardis, D.; Frisoli, A. A new wearable fingertip haptic interface for the rendering of virtual shapes and surface features. In Proceedings of the 2016 IEEE Haptics Symposium (HAPTICS), Philadelphia, PA, USA, 8–11 April 2016; pp. 140–146. [Google Scholar] [CrossRef]
- Sorgini, F.; Massari, L.; D’Abbraccio, J.; Palermo, E.; Menciassi, A.; Petrovic, P.B.; Mazzoni, A.; Carrozza, M.C.; Newell, F.N.; Oddo, C.M. Neuromorphic Vibrotactile Stimulation of Fingertips for Encoding Object Stiffness in Telepresence Sensory Substitution and Augmentation Applications. Sensors 2018, 18, 261. [Google Scholar] [CrossRef]
- Park, J.; Son, B.; Han, I.; Lee, W. Effect of Cutaneous Feedback on the Perception of Virtual Object Weight during Manipulation. Sci. Rep. 2020, 10, 1357. [Google Scholar] [CrossRef]
- Yang, T.; Kim, J.R.; Jin, H.; Gil, H.; Koo, J.; Kim, H.J. Recent Advances and Opportunities of Active Materials for Haptic Technologies in Virtual and Augmented Reality. Adv. Funct. Mater. 2021, 31, 2008831. [Google Scholar] [CrossRef]
- Kim, H.; Kwon, Y.; Lim, H.; Kim, J.; Kim, Y.; Yeo, W. Recent Advances in Wearable Sensors and Integrated Functional Devices for Virtual and Augmented Reality Applications. Adv. Funct. Mater. 2020, 31, 2005692. [Google Scholar] [CrossRef]
- Wang, D.; Guo, Y.; Liu, S.; Zhang, Y.; Xu, W.; Xiao, J. Haptic display for virtual reality: Progress and challenges. Virtual Real. Intell. Hardw. 2019, 1, 136–162. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, Y.; Sun, W.; Bian, Y.; Zhou, D.; Kristensson, P.O. Dexmo: An Inexpen-sive and Lightweight Mechanical Exoskeleton for Motion Capture and Force Feedback in VR. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 1991–1995. [Google Scholar] [CrossRef]
- Ben-Tzvi, P.; Ma, Z. Sensing and Force-Feedback Exoskeleton (SAFE) Robotic Glove. IEEE Trans. Neural Syst. Eng. 2015, 23, 992–1002. [Google Scholar] [CrossRef]
- Malvezzi, M.; Baldi, T.L.; Villani, A.; Ciccarese, F.; Prattichizzo, D. Design, development, and preliminary evaluation of a highly wearable exoskeleton. In Proceedings of the 29th IEEE International Conference on Robot and Human Interactive Communication, RO-MAN, Naples, Italy, 31 August–4 September 2020; pp. 1055–1062. [Google Scholar] [CrossRef]
- Wang, D.; Song, M.; Naqash, A.; Zheng, Y.; Xu, W.; Zhang, Y. Toward Whole-Hand Kinesthetic Feedback: A Survey of Force Feedback Gloves. IEEE Trans. Haptics 2018, 12, 189–204. [Google Scholar] [CrossRef]
- Sathiyamurthy, S.; Lui, M.; Kim, E.; Schneider, O. Measuring Haptic Experience: Elaborating the HX model with scale development. In Proceedings of the 2021 IEEE World Haptics Conference, WHC, Montreal, QC, Canada, 6–9 July 2021; pp. 979–984. [Google Scholar] [CrossRef]
- Balasubramanian, S.; Melendez-Calderon, A.; Roby-Brami, A.; Burdet, E. On the analysis of movement smoothness. J. Neuro Eng. Rehabil. 2015, 12, 112. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Reference | Function | Type of Feedback | Haptic Technology | Tracking Technology | Conclusion |
|---|---|---|---|---|---|
| Keef et al., 2020 [22] | Texture | Cutaneous | Glove with electrotactile feedback through conductive polymer electrodes and vibrotactile feedback through ERM 1 actuators | Flex-sensors forfinger positionand HTC Vive headset with motion tracker for hand position | The device is capable of providing a sensation of roughness through electrotactile feedback |
| Yem et al., 2017 [10] | Texture | Cutaneous | DC 2 motor for mechanical (vibro)tactile stimulation in combination with an electrode film for electrical stimulation | Computer-mouse | The device is capable of providing four dimensions of tactile feedback in a virtual texture exploration task. |
| Li et al., 2020 [23] | Thermal Quality | Cutaneous | Miniature ERM 1 actuators and two semiconductor refrigerators | Keyboard | The device is capable of providing temperature feedback conforming to skin characteristics. |
| Keef et al., 2020 [22] | Thermal Quality | Cutaneous | Thermoelectric devices | Flex-sensors for finger positionand HTC Vive system with motion tracker for hand position | The device is capable of expressing thermal quality. |
| Lee et al., 2021 [24] | Compliance | Kinaesthetic | Tendon driven with a selective locking mechanism | Motion capture system with infra-red markers and cameras | The mechanism can render rigid and elastic/ deformable virtual objects. |
| Mo et al., 2019 [25] | Compliance | Cutaneous | Three small servos and an uncoupled fivebar and a slider-crank linkage combination to provide 3-DoF 3 force feedback | Leap motion | The devices proved to be capable of rendering variable stiffnesses and users not only use haptic cues but also visual cues in detecting spring stiffness differences. |
| Hosseini et al., 2018 [26] | Compliance | Kinaesthetic | TSA 4 through a DC 2 motor | HTC Vive system | TSA 4 is a compact, lightweight solution for haptic rendering of virtual stiffnesses. |
| Maereg et al., 2017 [27] | Compliance | Cutaneous | Vibrotactile feedback with ERM 1 actuators and haptic controllers | Oculus Rift and Leap Motion | The device is capable of rendering stiffness for virtual stiffness discrimination. |
| Mo et al., 2019 [25] | Weight | Cutaneous (/kinaesthetic) | Three small servo motors and an uncoupled fivebar and a slidercrank linkage combination to provide 3-DoF 3 force feedback and an external kinaesthetic device | Kinaesthetic device ”Touch Haptic” | The performance of the subjects with cutaneous feedback was close to that with kinesthetic feedback. The device was capable of displaying mass information during remote manipulation. |
| Martinez et al., 2016 [28] | Size/shape | Cutaneous | 12 ERM 1 actuators, actuated with PWM 5 and pulse overdrive | Phase Space Impulse optical tracking system, which can track multiple LED markers at 480 Hz | The device achieves a good response rate in terms of shape identification, butalso has shortcomings due to the lack of kinaesthetic feedback. |
| Lee et al., 2019 [29] | Orientation | Cutaneous | Fingertip device with three DC 2 motors | A finger-tracking module with IMUs 6 and soft sensors | The importance of haptic feedback and full motion tracking is verified together with the performance of the device to enhance task completion time |
| Mo et al., 2019 [25] | Orientation | Cutaneous | Three small servo motors and an uncoupled fivebar and a slidercrank linkage combination to provide 3-DoF 3 force feedback | Leap Motion | The device with cutaneous feedback improved task performance |
| Hinchet et al., 2018 [30] | Orientation | Cutaneous/ kinaesthetic | Thin electrostatic brake for force feedback and piezo actuators for vibrotactile feedback | Optical tracking system | The device is capable of improving grasping precision through force and vibrotactile feedback. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
van Wegen, M.; Herder, J.L.; Adelsberger, R.; Pastore-Wapp, M.; van Wegen, E.E.H.; Bohlhalter, S.; Nef, T.; Krack, P.; Vanbellingen, T. An Overview of Wearable Haptic Technologies and Their Performance in Virtual Object Exploration. Sensors 2023, 23, 1563. https://doi.org/10.3390/s23031563
van Wegen M, Herder JL, Adelsberger R, Pastore-Wapp M, van Wegen EEH, Bohlhalter S, Nef T, Krack P, Vanbellingen T. An Overview of Wearable Haptic Technologies and Their Performance in Virtual Object Exploration. Sensors. 2023; 23(3):1563. https://doi.org/10.3390/s23031563
Chicago/Turabian Stylevan Wegen, Myla, Just L. Herder, Rolf Adelsberger, Manuela Pastore-Wapp, Erwin E. H. van Wegen, Stephan Bohlhalter, Tobias Nef, Paul Krack, and Tim Vanbellingen. 2023. "An Overview of Wearable Haptic Technologies and Their Performance in Virtual Object Exploration" Sensors 23, no. 3: 1563. https://doi.org/10.3390/s23031563