1. Introduction
As ecology, environmental protection, and energy efficiency gain more prominence, so does research into energy saving. It has been claimed that approximately 40% of the world’s electricity consumption can be attributed to residential and commercial buildings [
1]. Recent research has focused on residential buildings and has suggested that energy consumption can be reduced by up to 12% just by giving feedback to residential customers on ways in which they spend their energy, pointing out which home appliances use energy at each point in time [
2]. Therefore, to provide that necessary information, the most powerful approach, called intrusive load monitoring (ILM), proposes connecting smart meters, sensors for measuring consumed energy, to every appliance in the household/office/etc. This approach enables obtaining high-resolution and accurate energy information, which could be beneficial, especially in industrial applications, as suggested by [
3]. However, in cases when it is not possible to apply ILM, for example, in the residential sector when it is cost-ineffective or unappealing for the end users to install smart meters on all appliances in the households, energy consumption disaggregation is required and, hence, the concept of non-intrusive (appliance) load monitoring (NI(A)LM) is defined. Namely, NILM attempts to collect the same information using only aggregated power measurement, or in other words, the main goal of NILM is in solving the energy disaggregation problem on the appliance level. However, the precision of NILM approaches significantly decreases when data distribution from the targeting domain differs from the source one, which could negatively influence NILM’s utilization in everyday life. Therefore, the domain adversarial neural network approach (DANN) is proposed in this paper to improve generalization performances to extend the real-world application of NILM approaches.
Hence, the main contributions of this paper are as follows:
- •
Proposition and implementation of DANN approach for the first time in the context of the NILM problem;
- •
Solving one of the crucial NILM problems of achieving better generalization by combining beneficial characteristics of both supervised and unsupervised learning approach, exploiting the full potential of accessible data;
- •
Benchmarking the system’s performance against the current state-of-the-art methodology using two real-world publicly available (and most used) datasets;
- •
Establishing an approach that makes NILM more applicable in everyday life, making it more convenient in practice than previously proposed solutions.
The remainder of this paper is organized as follows.
Section 2 provides an extensive state-of-the-art review for non-intrusive load monitoring, while
Section 3 elaborates on the problem definition, current difficulties, technical barriers, and the main problems of this paper. Details regarding the proposed approach are given in
Section 4, i.e., the method, architecture, and training specificity, whilst in
Section 5, data preprocessing methods, characteristics, and parameters are discussed along with the essential measurement data characteristics that can potentially influence the results and performances.
Section 6 presents an overview of the training specification and description, followed by the results and performances presented in
Section 7. Finally,
Section 8 summarizes the paper, giving the overall view and conclusion of the obtained results and providing future work suggestions.
2. Related Works
The first field that will be covered by the state-of-the-art analysis is related to the hardware-based methods for individual consumption measurements—the ILM methods, reviewed in [
4]. These are focused on the deployment of IoT sensors on household appliances to obtain crucial measurements, further enabling the development of various IoT-based applications. In [
5], IoT architecture consisted of the appliance layer, perception layer, communication network layer, middleware layer, and application layer enables the development of the activity recognition system based on energy-related data. Moreover, in [
6], the authors offered a rich data set, which combined outputs of ILM, or energy-related data, and other IoT measurements, such as indoor environmental conditions, HVAC operations, and outdoor weather conditions. This gives the possibility to exploit the data for occupancy predictions, behavior modeling, building simulation, energy forecasting, etc. Furthermore, in [
7], control strategies for reducing energy consumption are based on energy consumption measurements by the Plug-Mate management system, showing the potential and effectiveness of ILM.
Even though it is clear from the previous related work summary that the application of ILM approaches are wide, there are, unfortunately, cases when the installation of a large number of sensors is not possible and, hence, ILM could not be established, which is why NILM modeling is attractive and common in the literature.
The first method dealing with the NILM problem was introduced in the late 20th century by Hart [
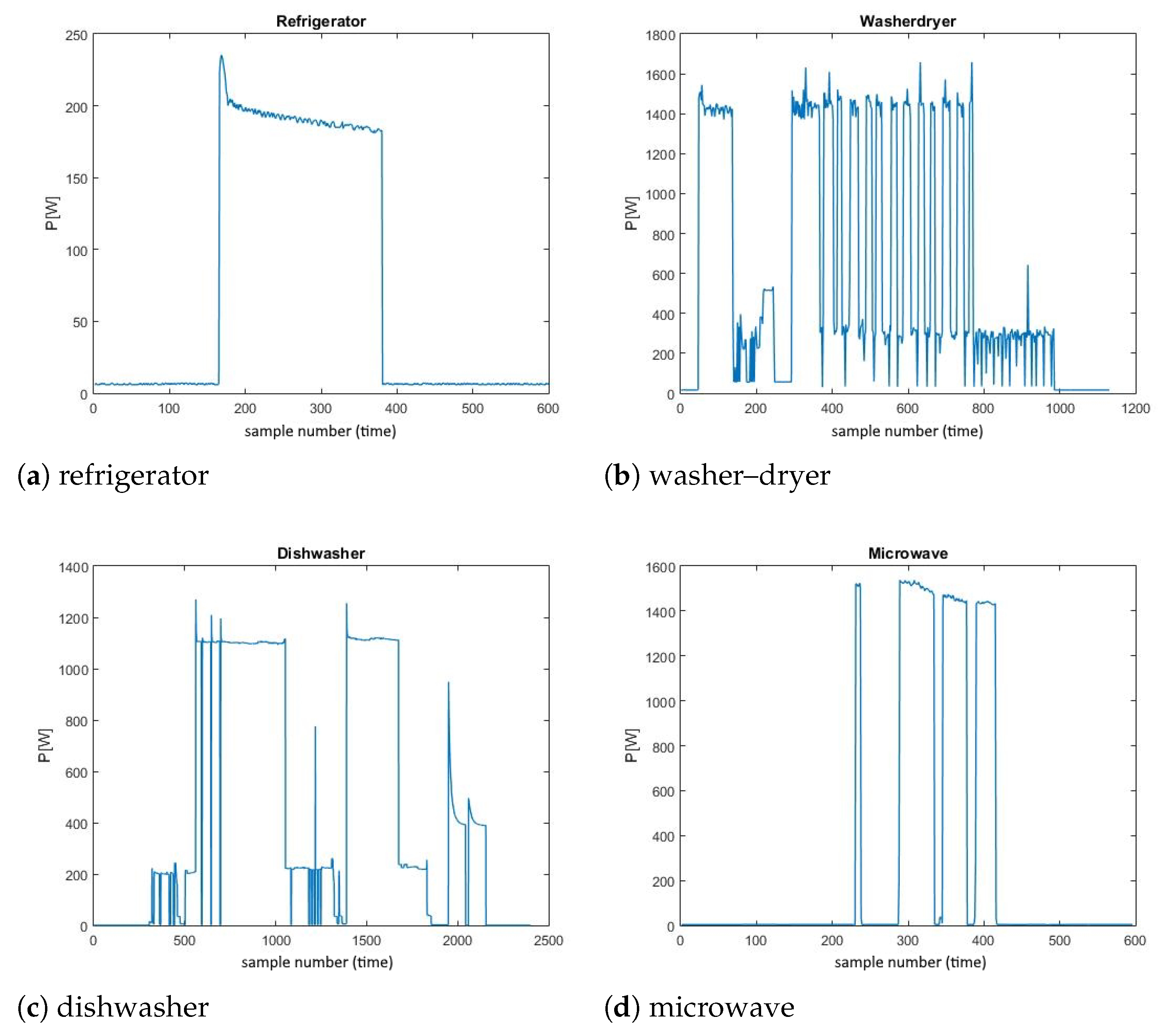
8], whose idea was to detect appliance activations based on the magnitude of the difference in aggregate power. Even though this approach can be easily modified to suit multi-state devices, those which have more than one steady state, this approach is hardly practical, as the difference in magnitude is not equal for all types of the same device. For example, appliances from different manufacturers usually do not consume the same amount of power in the same state. Another huge problem in this approach involves the so-called continuous devices, where consumption varies through time, taking an infinite number of potential states, such as a refrigerator. Accordingly, numerous techniques were developed to deal with these problems; in the literature, they are separated into two groups, i.e., methods using data sampled with high and low sample rates [
9]. By the term high sample rate, a range of frequencies from several kHz to several MHz is considered. These approaches are appealing as they can include frequency-based techniques and analyze transient characteristics in more depth. However, smart meters with such a high sampling rate are generally not available in households nowadays, making these approaches non-applicable in practice. On the other hand, low sampling rate methods, with sampling frequencies of 1 Hz and lower, are the main point of interest of researchers in the NILM field nowadays. Apart from the classification by sampling rate, due to different characteristics and the amount of publicly accessible data, the algorithms can be separated by their practical uses into ones developed for the residential sector and others for the commercial sector [
10]. As the main focus of this paper lies within the residential sector, the commercial sector is not going to be discussed any further.
The first group of low sampling rate methods that are widespread in the literature involve techniques based on hidden Markov models (HMMs). A HMM is a Markov model with non-observable states. Alternately, the state is characterized by a probability distribution function that models the observation corresponding to that state [
9]. HMMs are widely used because the state of the individual appliance is not directly observable, but can be obtained through aggregated power. In order to overcome computational complexity, which exponentially grows with the number of modeled devices, factorial hidden Markov models (FHMMs) were proposed in [
11,
12]. Moreover, to compensate for the inadequately modeled state occupancy duration, semi-hidden Markov models were presented in [
13]. Additionally, to include the appliance correlation, conditional factorial hidden Markov models (CFHMM) were implemented and discussed in [
14]. Moreover, [
15] presented results using a combination of HMM and the improved Viterbi algorithm. Finally, in [
16], the authors recently proposed FHMM based on adaptive density peak clustering, which reduces the dependence on prior information and is more applicable in real-world scenarios. Nevertheless, none of these methods learn appliance-specific patterns that significantly reduce the possibility of generalization. Furthermore, the detection of multi-state device activation is challenging for these algorithms as they do not adhere to the Markov assumption that the next state depends only on the current state, and not the previous ones.
Besides the different HMM approaches, other unsupervised methods are present in NILM literature, as well [
17]. They are practically beneficial as they do not require individual device’s power consumption, which is likely to be inaccessible. On the contrary, they cannot achieve as high performances as the supervised ones, due to the lack of information. In [
18], the authors presented a fully unsupervised approach based on clustering and histogram analysis using conditional random fields, whilst Dynamic Time Warping transformation and dynamic programming were employed for template signature matching in [
19]. Moreover, in [
20], the authors presented an unsupervised novel approach based on spiking deep NNs, which outperformed even some supervised ones. In [
21], the hybrid approach was proposed, a combination of supervised and unsupervised methods, which is correlated with the work in this paper as our goal and one of the main contributions is improving generalization by using both labeled and unlabeled data. Nevertheless, the main concepts are entirely different as their approach is based on HMM, whilst the one in this paper is based on neural networks. Additionally, similarly to this paper, [
22] focused on semi-supervised learning using both labeled and unlabeled data to improve the performances on the house of interest. However, their approach is focused on a semi-supervised one-nearest methodology, rather than convolutional neural networks, which were chosen as part of this work. Finally, [
23] highlighted that there was a lack of semi-supervised approaches that exploited all accessible data.
Besides the HMM-based approaches, another probabilistic method that has been used in the NILM field is graph signal processing (GSP) as in [
24,
25,
26], mostly all by the same authors. In [
27], the authors highlighted potential problems of the model’s underperformance in real-world practice in the case when training data were lacking, proposing GSP with a novel learning algorithm as an appropriate solution for the NILM problem. Furthermore, in a recent study [
28], GSP, enhanced by improving feature selection through extracting state transition sequence features, showed performance improvement on the publicly available data. Additionally, apart from these probabilistic methods, as reviewed in [
29], many data-based techniques are proposed for solving the NILM problem, such as support vector machine (SVM), k-nearest neighbor (kNN), algorithms for matching the power signal with the built signature database, etc. Moreover, for feature detection, wavelet transformation [
30] and the V-I trajectory approach [
31,
32] were proposed and employed for energy disaggregation, whilst in [
33], the authors used the sum-to-k constraint to extract information from the bewildering combinations of different sources. Additionally, in [
34], the Karhunen–Loève expansion (KLE) was used in combination with the spectral clustering-based method.
Nonetheless, neural networks (NNs), capable of solving tortuous problems, and making remarkable improvements in image classification and speech recognition, became some of the most frequently used state-of-the-art techniques due to the fact that they provide features that improve performances dramatically, as stated in [
35,
36]. Various papers explored different neural network architectures. One of the first was [
37], where three different architectures were proposed based on convolutional neural networks (CNNs) and recurrent neural networks (RNNs). Their scores outperformed FHMM, proving that NNs are capable of extracting signatures that increase accuracy in detecting and estimating appliance consumption. In [
38], both CNNs and RNNs were used, whilst in [
39], the imaged current’s transient waveform was used as the training set for CNN. Application of long short-term memory (LSTM) NN is present, as well. In [
40], the authors proposed adaptive bidirectional LSTM models and showed their superiority against other models, whilst in [
40], parallel LSTM topology was proposed. In [
41], authors pointed out the potential that deep learning has shown in NILM, solving the problem of vanishing gradient and model degradation using dilated residual attention network. Furthermore, authors applied a combination of bidirectional temporal convolutional networks and achieved improved precision performances in comparison with the previously existing approaches in [
36], whilst [
42] achieved it by utilizing an attention-based deep NN. Moreover, in [
43], a hybrid solution consisting of an adaptive thresholding event detection method, CNN, and kNN, was proposed and was envisioned for detecting any number of appliances in real time. Most importantly, this can be efficiently run on the edge. Taking the presented conclusions from these authors into consideration, it was decided to use a specific deep CNN architecture in this paper, trained by a predefined process using labeled and unlabeled data, to synthesize the beneficial characteristics of both a supervised and unsupervised approach, with the hopes of improving the generalization performances, which turned out to be achievable as the results will show.
In [
44], the sequence-to-point (seq2point) CNN architecture was presented. The main idea was to estimate the power consumption of an individual appliance according to the input window of aggregated power so that the output of the network predicts the appliance’s power usage at the midpoint of the window. As this approach showed high performances when compared to previous work, it was selected as the base for work in this paper. Namely, the goal was not to estimate the device’s consumption but to detect its (in)activity. Since this architecture was capable of extracting features necessary for resolving the regression problem, it was expected to perform even better in the context of binary classification. Therefore, in this paper, it was combined with the domain adversarial neural network approach (DANN) [
45] to improve generalization performances, with details presented in
Section 4.
3. Problem Definition
In general, it is widely accepted that good generalization is one of the crucial characteristics that the proposed NILM algorithm should have and is highlighted as one of the five main challenges in [
46]. Due to that fact, most of the research tested the proposed solutions on data from houses that were not seen during the training process. However, those houses are, almost always, from the same dataset as the training ones. Therefore, the correlation between the training and testing data is high. More specifically, publicly available datasets consist of measurements from neighboring houses, which are likely to use similar devices, have similar habits, etc. So, even though the testing process is not performed on the house that the algorithm was trained on, the obtained results do not depict the real picture of real-world applications. In other words, since the algorithm is meant to be implemented in practice on houses that do not have smart meters on every appliance, the obtained results would not be adequate and representative and it is highly likely that the expected performances would decrease significantly. Exactly this was highlighted as the key remaining problem to be explored for NILM solutions by [
47] review paper. Solving this exact problem is the main focus of this paper. Namely, the proposed algorithm presents an advancement of the seq2point architecture and is supposed to improve generalization on unexplored houses. Moreover, to exploit the full potential of available information, unlabeled data that are usually unused was included, which is one more improvement that this paper contributes to the state-of-the-art algorithms.
In this paper, the underlying idea is the usage of the domain adversarial neural network approach (DANN) to overcome the problem of poor generalization, keeping in mind the fact that there are substantial differences between training and testing data. DANN was inspired by the generative adversarial network (GAN) [
48] and was proposed in [
45]. The GAN is a widely accepted technique used for generating new data samples, especially popular in the field of image processing, such as in [
49,
50]. However, due to their high performance in image processing, they were also exploited in other domains. For example, [
51] utilized the GAN approach for data imputation in the transportation domain, whilst [
52] reviewed generative models for the graph generation. This wide acceptance of GAN influenced further improvement in the field, such as with the DANN proposition. What these two approaches have in common is their way of measuring and minimizing the disparity between the distribution of training data and the synthesized or testing batch. In both cases, the goal is to disable a part of the model from determining the originating domain of the data. For DANN, it is crucial because the aim of the proposed method is not to allow the system to specialize in the training data. In other words, this net is intended for problems where:
There is a significant disparity in distribution between the source and target domains.
When labeled data from the source domain are accessible.
When labeled data from the target domain are not accessible.
When unlabeled data from the target domain are accessible.
In those cases, two of DANN’s main advantages are as follows:
- o
DANN is able to adapt to the target domain with minimal labeled data. This is particularly useful when labeled data are scarce or expensive to obtain in the target domain.
- o
DANN is able to minimize the domain discrepancy. DANN is able to learn a shared feature representation that is common across different domains, which is useful in minimizing the domain discrepancy and improving the generalization performance of the model.
This is indeed the case in the considered NILM scenario. Exactly that is why this method is more applicable and shows higher scores, as will be proven in this paper. Namely, many state-of-the-art solutions succeed in achieving respectable results on the tested data. Nevertheless, if the data collected for the place of interest are not large enough, the performances would probably be unsatisfactory and incomparable with the presented ones. Therefore, to make NILM more accessible in everyday life, an algorithm that does not require inaccessible labeled data from the target domain, precisely individual appliance consumption from the target domain, is proposed and, at the same time, performances on that very same domain were increased.
As one of the most impactful contributions of this paper, the DANN method was used for the first time as the core method for solving the NILM problem. Moreover, its performance was benchmarked against seq2point in two scenarios with different datasets, thus emphasizing the generalization potential of the proposed methodology. The semi-supervised approach allows this technique to retain the best characteristics of both supervised and unsupervised methodologies, especially having in mind that the full amounts of available data are utilized.
4. Proposed Approach
The DANN architecture was presented in [
45] and it has already been used for speech recognition as in [
53,
54], as well as for image classification [
45]. However, it has not been used for solving NILM problems yet, which is one of the contributions of this paper. In this section, the DANN architecture and its training process are going to be briefly discussed, as well as its characteristics and performances.
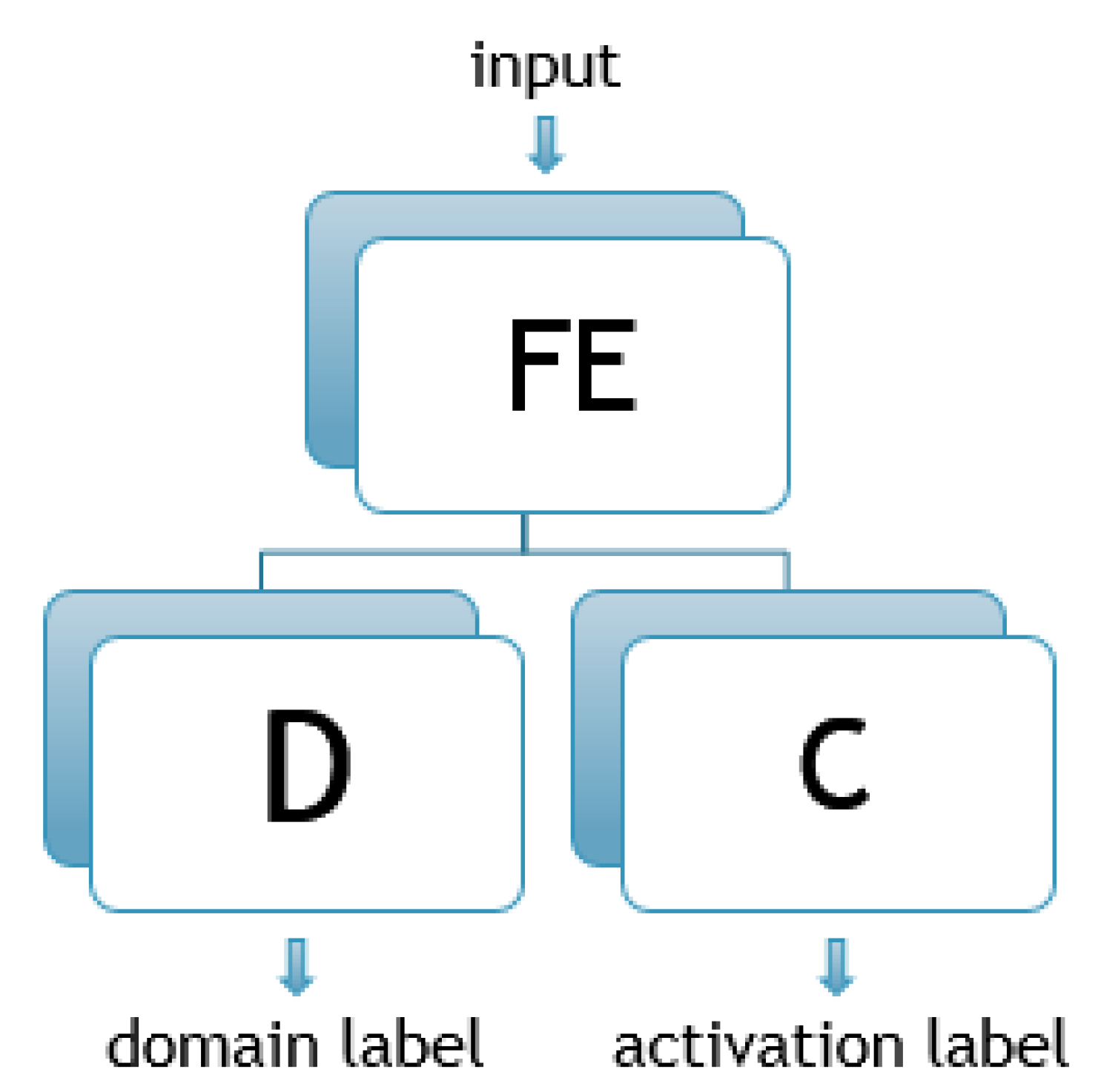
DANN is defined as a neural network consisting of three subnet components—a feature extractor (FE), a classifier (C), and a discriminator (D), as shown in
Figure 1. FE is a (C)NN that is supposed to extract features from the input data. In the case of NILM, depending on the input window of aggregated sequence, the outputs of this subnet are different features. If
is an input vector representing aggregated power consumption samples, the output of the FE block
f could be given as
where
is FE’s mapping function from its inputs to the extracted features given through its adjustable parameters
. This part of the system is consistent with the previously mentioned seq2point net. The architecture is described in
Table 1 with the only difference from seq2point being the omission of the last dense layer as it was used to calculate the appliance’s power consumption according to the extracted features, not for their selection. Hence, the mapping function of seq2point is contained in
, with potentially different values of the parameters due to the different training process. The C is a set of two dense layers, as shown in
Table 2, and it is supposed to determine the appliance’s state, given the extracted features by the FE subnet. In other words, the estimated appliance’s state
is given as
where
is C’s mapping function, represented by parameters
C. The D is a domain classifier formed alike C, as described in the aforementioned table. D is supposed to distinguish whether the input window of the aggregated sequence originates from the source or the target domain, which is also consistent with the extracted features, which are outputs of the FE. It could also be represented in the following way
where
corresponds to the estimated origination label and
is D’s mapping function.
is given by parameter
D.
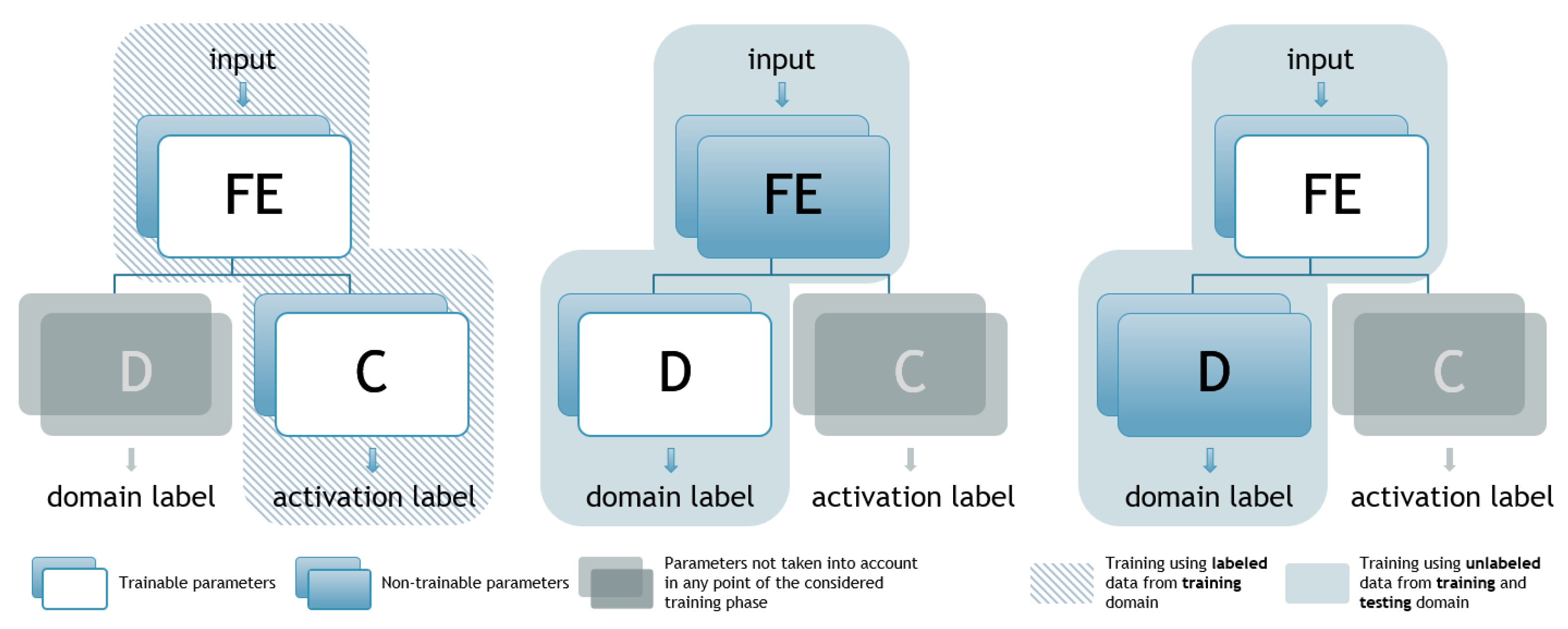
The main idea is to direct FE to adjust its parameters during the training process in such a way that the learned features, used by C for activity classification, are not specific to the source domain. This is achieved by training the FE in such a way as to provide outputs that would result in the D part of the net not being able to distinguish correctly the originality of the inputs. Hence, extracted features are supposed to be representative so that C is able to recognize the appliance’s pattern and its activity, but not the source domain, so that D is not able to distinguish the input’s originality at the same time. Selection of the appropriate features for activity classification is achieved using labeled data, whilst preventing specialization on previously seen data and improving generalization is achieved by using unlabeled data for determining the testing set’s probability distribution. In practice, the data are accessible, as each house using any NILM system must provide, at the bare minimum, aggregated power measurements. Hence, not only does this system improve generalization, but it also exploits the full potential of the accessible data. This idea is realized by a specific semi-supervised training process, which is shown in
Figure 2 and given by pseudocode in Algorithm 1. It consists of two phases and three steps where, in each one of the steps, two out of three subnets are being trained, whilst the third one is omitted. The steps are given as follows:
The FE+C part of the net is trained using a standard backpropagation algorithm, while D is not considered. The aggregated power sequence is taken as an input to the FE block while the output is a hot-encoded vector, referred to as the label, denoting the appliance’s state—active or inactive (10 for active and 01 for inactive), depending on the individual consumption measurements for the considered appliance. In this phase of the training process, only data originating from the source domain are being used, meaning that only labeled data are used. This process is identical to the seq2point training, with all of the same data used. It could be formally given as follows:
where
is the parameter of the FE network characterizing function
,
C is the parameter of the C network characterizing function
,
J is a function used during backpropagation,
x is the input-aggregated power sequence,
s is the desired appliance activity label,
is the activity estimation, and
represents part of the source domain used for training as labeled data.
The second phase consists of two steps in which the FE+D part of the net is trained, whilst C is not considered. The input remains in the aggregated power sequence, whilst for FE+D, the training process outputs are domain-originated hot encoded vectors, or domain labels for short, denoting whether the input sequence comes from the source or target domain. In other words, in this phase of training, no individual appliance consumption is required, or more precisely, no data labels are necessary, implying that this phase of the training process could be considered unsupervised in the context of activity classification. The only data needed are aggregated power measurements.
- (2.1)
In the first step of FE+D training, the FE parameters are fixed (non-trainable). In this way, the discriminator’s parameters are adapting to distinguish the domain of origin depending on the features extracted by the FE. The mathematical formalization is as follows:
where
J is the function used during backpropagation,
represents a dataset containing aggregated power sequences
x from both the source and target domains and their corresponding domain labels
d,
is the estimated domain label,
is the parameter of the FE network characterizing function
, and
D is the parameter of the D network characterizing function
.
- (2.2)
After D’s parameters are adjusted, in the last step, they are left to be non-trainable, whilst only FE ones are trained. In this part of the training process, the reversal layer (RL) is supposed to be added between FE and D in accordance with [
45]. The motivation for this modification is the fact that the extracted features should not be dependent on the domain, so the discriminator is not supposed to be able to classify them correctly. However, to be able to employ the standard (C)NN training procedure, instead of introducing the RL, in the third phase, all of the domain labels were inverted, resulting in the same effect as the RL would give. Mathematical formalization is as follows:
where
J is function used during backpropagation,
represents a dataset containing aggregated power sequences
x from both the source and target domains; their corresponding domain labels
d,
are the inverted domain labels to label
d,
is the estimated domain label,
is the parameter of the FE network characterizing function
, and
D is the parameter of the D network characterizing function
.
Finally, the sequences of these two phases are repeated until convergence. Each phase/step might be repeated a couple of times within one cycle with the details on the number of epochs and repetitions of each phase in the employed training process given in
Section 6.
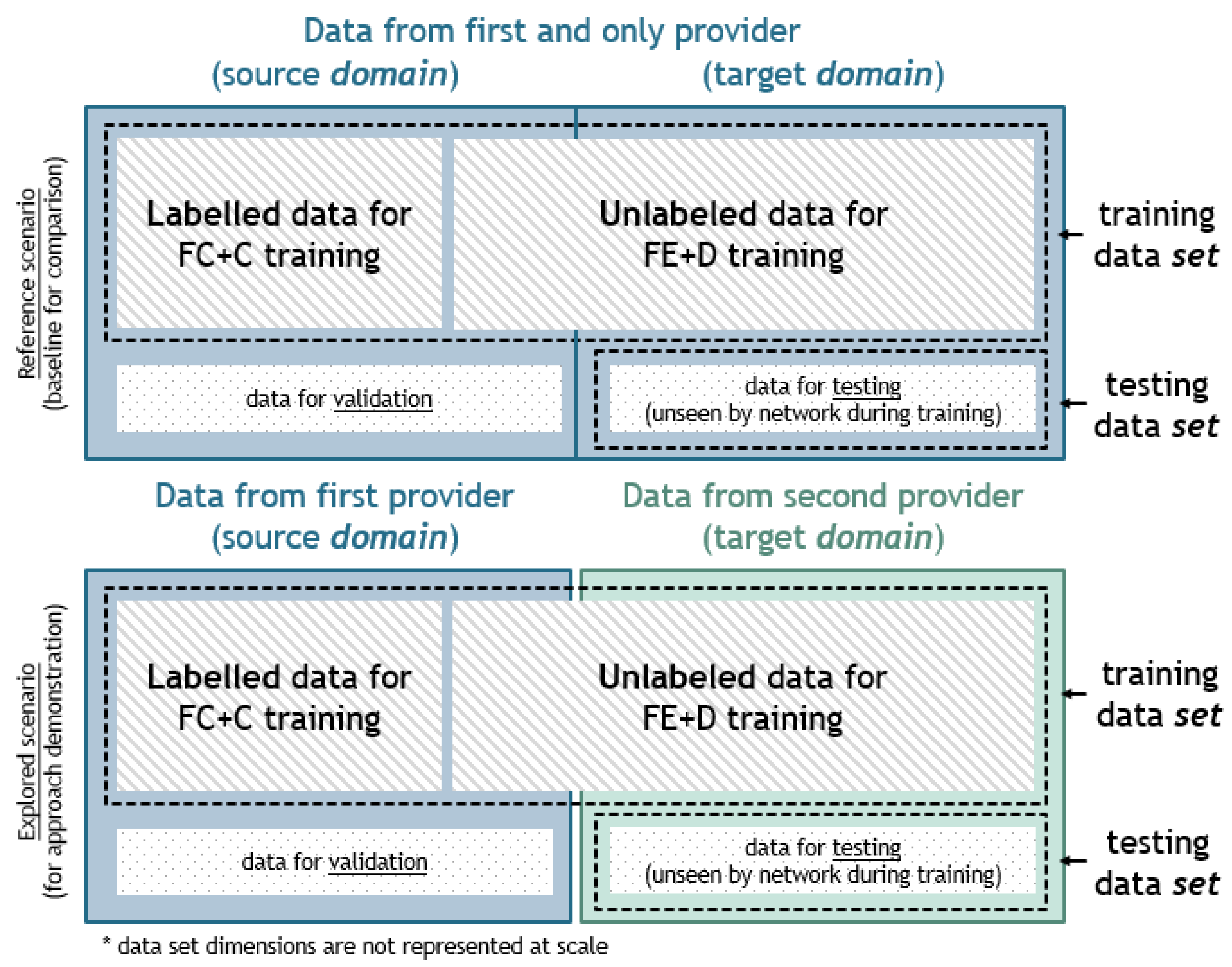
A crucial thing to note is that the terms
set and
domain are used to refer to different types of data classification, as shown in
Figure 3. Namely, training and testing sets are terms used specifically for the group of data used for either training or testing purposes. In other words, the training
set is equivalent to data seen by the NN during training used for the NN parameter adjustment and the testing
set is equivalent to data unseen before being used only for the evaluation of NN’s performances. On the other hand, source and target
domains refer to the origination of the data where the source domain is the main source of the data and the targeted domain is a dataset with a significantly different distribution than the training one and to which the methodology is to be applied. As already mentioned, labeled data used for the training process come only from the source
domain. For example, data from one provider can be considered the source domain as it is the main source of the data, used both as labeled and unlabeled, and data from the second provider can be considered the target domain, used only as unlabeled. However, to overcome the issues that stem from the distribution variety, the proposed approach uses data from both source and target
domains for training purposes. Therefore, the training
set consists of labeled data from the source
domain but also incorporates a portion of unlabeled data from both the source and target
domain. However, when testing performances are presented at the end of this paper, only previously unseen data (testing
set) were used for the given analyses.
| Algorithm 1 DANN Training |
Inputs: initial source domain , target domain hyperparameters for FE, C, and D networks number of epochs for three steps of the training process number of training cycles n Algorithm: separate data from for labeled and unlabeled training extract inputs from extract outputs from combine inputs from and create domain labels from and initialize networks with for i < n do train by for epochs FE part of C part of train by for epochs with part frozen D part of invert train by for epochs with D part frozen FE part of end for |
Taking all previous into consideration, as far as the NILM problem is considered, the authors find this approach adequate according to the fact that it is highly likely to have differently distributed source and target domains, which might lead to significantly decreased performances when using standard approaches. Moreover, it is crucial that DANN is not more computationally complex than the state-of-the-art solutions, as will be presented in
Section 7. Therefore, it can be implemented on real data.
6. Model Training and Implementation
To completely describe the training process, important training parameters are given in
Table 6. Net’s training was implemented in Python using the TensorFlow library which enables the parallelization of the training process on the GPU (NVIDIA GeForce 1080 Ti), which significantly accelerated it. Two different architectures were trained (seq2point and DANN) and training analytics are going to be presented and deliberated on in this section.
To provide a comparison between the state-of-the-art solution (seq2point) and the proposed DANN approach with improved generalization, the data were organized as follows in one of two ways for all four appliances (
Figure 3):
Only REDD data were used. More precisely, a part of it was used as the source and a different part of it (data from one house) as the target domain.
Both REDD and UK-DALE data were used with REDD as the source domain and UK-DALE as the target domain.
Seq2point was trained on a training
set using only the portion of the data from the source
domain, which came from REDD. The performances of this network were used to provide a baseline for comparison with DANN, which was trained afterward. On the other hand, DANN was trained using data both from the source and target
domains, as explained in
Section 4. Testing of the two different cases was implemented to show the potential of the proposed approach when compared with a case where the generalization potential is low. Therefore, in the first case, generalization potential was low since the data from the source and target domains had a similar distribution, as both originated from the same dataset. On the other hand, in the second scenario, the generalization potential was higher, as data from the source and target domains had different distributions, which was utilized to show how the model would perform in a real-world setting.
Nevertheless, apart from the fact that, in these scenarios, training was performed using different data, this process can be considered as basically the same. In the manner that was presented in
Section 4 in
Figure 2, training for this architecture consists of 2 phases—one that corresponds to the classifier training (left diagram) and the other that is associated with the discriminator fitting (middle and right diagram). However, the ratio between classifier and discriminator training length can be extremely important. In other words, if the classifier is not trained long enough, it cannot extract any meaningful features from either source or target domain, resulting in underperformance. Conversely, if insisting on classifier training, it will end up as if the discriminator had not existed. Taking all of the previous into consideration, it can be concluded that it is relevant to train the classifier for some time longer than the discriminator as its task can be considered more challenging. Therefore, in this paper, it was experimentally concluded that in each cycle it was optimal to carry out phase one of training two times in a row, whilst the second was performed only once every cycle. In the final epoch, only phase one was carried out.
Finally, the training process was conducted and training terminations for all 12 of the considered nets are elaborated in
Table 7. Starting with the seq2point refrigerator’s architecture, the training process was stopped as the criterion value started increasing and this metric, which previously reached almost 98% on both the training and validation set, started decreasing. Namely, this occurs when the algorithm has reached a small region around the optimal solution and it cannot reduce the function any further. The very same idea was applied to the DANN trained for classifying dishwasher’s activity when trained on the REDD data. Considering the DANN trained for refrigerator’s activity classification on REDD data, termination occurred as both the training and validation criteria did not change significantly for several epochs. The same was for the washer dryer’s seq2point and DANN on REDD, and for all microwave’s nets. Furthermore, the last net trained for the refrigerator’s activity detection, the DANN using both REDD and UK-DALE sets, was terminated due to the fact that the validation metric did not change for a couple of epochs, whilst it increased on the training data, leading to an increasing difference between the training and validation criteria, which indicates overfitting. Moreover, the washer dryer and dishwasher’s DANN (trained on combined data) were stopped because of fact that the validation criterion increased. Finally, the dishwasher’s seq2point training process was stopped due to the fact that an already significant difference between training and validation criteria was further increased by increasing validation criteria for a couple of epochs.
7. Performance Comparison and Results
After defining the datasets that were used, architectures and training procedures, preprocessing algorithms, and analyzing the data for generalization applicability, this section provides the results of the proposed methodology and discusses them in detail. In order to appropriately compare the performances of seq2point and DANN architectures, two scenarios were tested. Namely, the main idea for DANN implementation was improving generalization. Therefore, the essential disparity between the two proposed scenarios was the difference between the source and target domains.
In the first one, both source and target domains were subsets of the REDD dataset, as presented in the above picture in
Figure 3. For the target domain, data from one house for each appliance were separated, so that the obtained testing performances would truthfully depict the system behaviors on the unseen house, while the remaining houses formed the source domain. Hence, in this first scenario, data from the separated house were partially used for the training set, but only as unlabeled, while the rest were used for the performance evaluation during the testing phase (testing set). Finally, such a partition resulted in the fact that none of the data used for the training process were used for testing. As for the second scenario, the REDD set represented the source domain and UK-DALE represented the target domain. This resulted in significantly different data distributions between the domains and enabled higher generalization potential. Similarly to the first scenario, as given in the picture below in
Figure 3, the target domain was split, so part of it was used as unlabeled during the training process, and part of it was used only for the performance evaluation.
House combinations used for source and target domain purposes are shown in
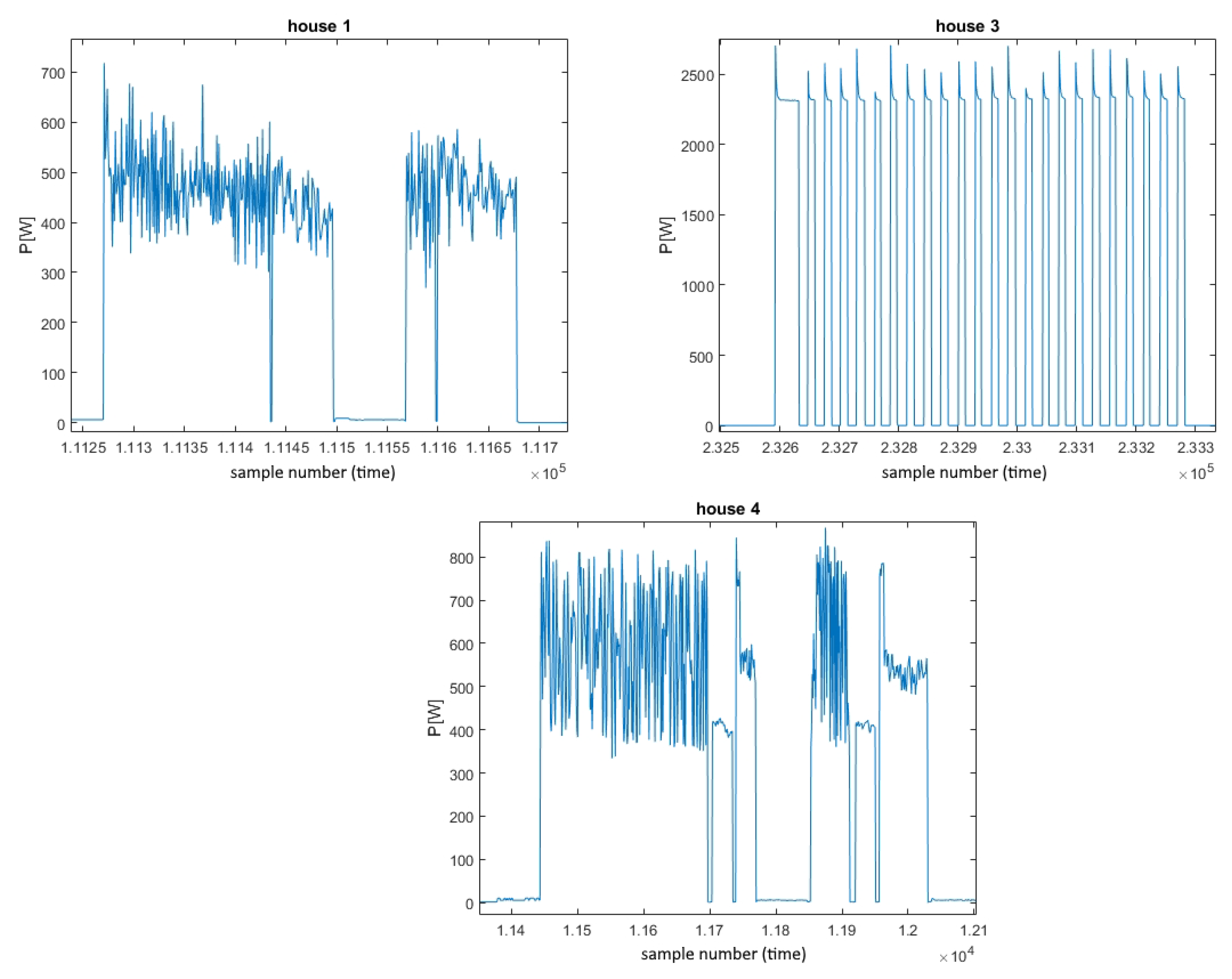
Table 8. The initial idea was to use the same house for all testing purposes. However, this was not possible for several reasons. Considering the REDD as the target domain, data from the third house for washer–dryer were not correlated enough with all the others, as discussed in
Section 5. As these data were not taken into account any further, the washer dryer’s REDD testing house was selected differently from the others. It should be mentioned that the only house that contained data from all of the analyzed appliances was the first one. Nonetheless, for all of the devices, the most comprehensive data originated from this house, which is why it was saved for training purposes. Furthermore, considering the UK-DALE dataset, it was not possible to use the same house, as none of the available houses contained measurements of all of the considered appliances. Therefore, for the washer–dryer the only possible (fifth) one was selected, whilst for all of the others testing data originated from the same (first) UK-DALE house.
Finally, the performance comparison is presented in
Table 9. There, one could observe F1 scores, depicting how models are accurate, both for the seq2point and DANN architectures for all four scenarios per each device. In the first scenario, the seq2point trained networks were tested on unseen REDD houses, and in the second scenario, they were tested on selected UK-DALE houses. Except for the microwave, the seq2point’s performance significantly declined when tested on different domains, by more than 25% in some cases. As previously mentioned, DANN was also tested in these two scenarios. In the first one, since the data from the source and target domain were expected to be highly correlated, it was expected that the seq2point network would outperform DANN for all devices, which was confirmed. This is because CNNs perform better when the training set represents the problem well, meaning that all relevant data are included. In cases where there is little difference between the training and testing data, CNNs are a suitable solution. On the other hand, DANN is inadequate in this context because it is meant to be applied to problems where significant differences in domains exist. In this case, the lack of differences leads to a decrease in the information used for classification without a valid reason, resulting in inferior performance.
On the other hand, when comparing F1 scores on the testing data set coming from differently distributed domains in the feature spaces, it is expected that DANN outperforms seq2point. This was corroborated by the second tested scenario, where for 3 out 4 available devices, DANN outperformed the seq2point architecture for 2% on average, proving its crucial generalization capability. These results are consistent with other previously published results from the DANN applications in other domains. Similar to these results, in [
53], the authors achieved an error rate reduction in speech recognition of around 2%. The fact that DANN outperformed seq2point, in this case, was the consequence of the fact that DANN’s architecture, and the corresponding training process, contributed to more adequately choosing features and, thus, improving accuracy performances. However, when testing on the microwave, seq2point performed better because the power consumption of microwaves was found to be highly correlated between the two domains, as discussed previously. One characteristic that contributes to this assertion is the fact that the seq2point architecture trained on REDD houses achieved better performances on the UK-DALE house than on the REDD unseen one (as shown by seq2point’s 82% and 89% F1 scores for the microwave). Therefore, it is expected that UK-DALE is more similar to the training data, implying a high correlation between the two domains. Moreover, as proven in
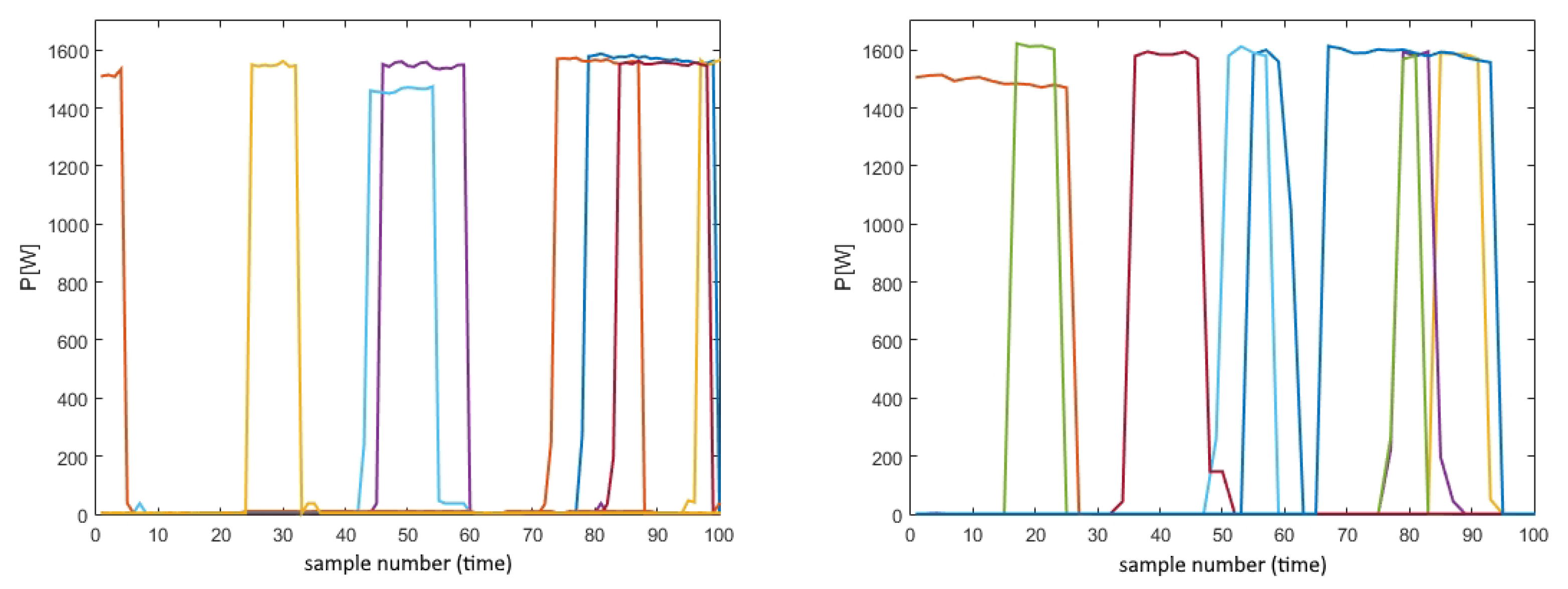
Section 5.2, there is not much of a difference between the REDD and UK-DALE microwave’s data, suggesting that the most important premise on differently distributed domains was not satisfied for this appliance. Despite this exception, the study suggests that this approach is improving current state-of-the-art performances and has the potential for practical use in improving generalization performance across various devices.
After proving that the DANN approach can improve generalization performances, it was necessary to show that the training DANN duration is comparable with the seq2point one, so that this improvement in generalization does not come with a drastic cost in the training time. Keeping in mind that, for each appliance, a different number of training examples was present, it was decided to compare normalized training duration instead of the absolute one. Additionally, keeping in mind that the FE+C and FE+D parts of the DANN architecture were trained using different data, resulting in an unequal number of training examples, the final estimation of metrics is given as
where
represents the metrics for the
architecture,
time spent training
architecture,
number of examples from the source domain used for seq2point and FE+C net training and
number of examples from the target domain used for the FE+D training process. Finally, the ratios between
and
are shown in
Table 10 as the relevant metrics for the considered household appliances. Here, it can be observed that, on average, 2.44 times more time has to be invested into the training process in the case of DANN in comparison with the seq2point architecture. However, this is completely acceptable having in mind that this is a one-time effort that can be handled within one day.
Finally, as the last step of the performance evaluation that will be given in this paper, analysis related to the ability of this solution to run, not only on the cloud, but on the edge. This is crucial to confirm the potential for large-scale rollout of this approach. The most important fact related to applying DANN on the edge is that it does not introduce any additional restrictions to conventional deep NN models edge application, since the difference which improves the generalization performance is related to the training, not the running process. During the running phase, it is a standard NN model, which calculates the outputs of each hidden layer, and finally, it combines it into the output. The restrictions that should be considered, though, as for any NN edge application, are related to the memory limit, especially when architecture is growing. Hence, it might be the case that some complex NN architectures would have to be omitted when applied to some simple edge computer, even though they could be easily run on the cloud. However, this would be a limitation even if the same sequence-to-point architecture is applied. Hence, it could be concluded that DANN is applicable on both the edge and cloud platforms, respecting available resources in the same manner as any NN.
Taking all of the previous into consideration, it can be concluded that this novel DANN approach in the NILM field can result in a noticeable improvement in performance in a real-world practice with acceptable costs in terms of training and execution times.
8. Conclusions
Convolutional neural networks are widely used for numerous classification and regression problems as they achieve high performance, even when problems are convoluted. Nonetheless, their performances are highly dependent on the data used, particularly if the testing data deviate significantly from the training set when performance can significantly decrease.
Considering the NILM problem, publicly available datasets can deviate from the measurements of interest depending on the location, the number of household members, social status, etc. Therefore, CNN’s performance on the house of interest tends to be unacceptably low because of the fact that the training set does not represent the target domain adequately. On account of this problem, this paper presents a method that improves generalization capabilities by additionally using unlabeled data from the target domain, which are always available and often left unused. In particular, domain adversarial neural networks were implemented for the first time for solving the NILM problem and improving the disaggregation generalization performance, by several percent. Namely, the generalization potential was verified using the two most frequently used datasets: REDD and UK-DALE, concluding that this method improves current state-of-the-art solutions and can be suggested for practical use. Moreover, if this approach is to be used in a real-world application, it could potentially achieve even higher precision, since models could be retrained using unlabeled data from the target domain, which are constantly growing.
Even though the main goal of proving that the proposed approach improves the generalization performance was achieved within this paper, additional research potential is still present. Namely, it was stated that the approach presented within this paper does not provide real-time energy disaggregation, which is one of the downsides that could be improved and analyzed in the following research. Moreover, the authors firmly believe that semi-supervised approaches, although highly suitable in the given context, are still underrepresented in literature and, therefore, present a potential area of future research. Furthermore, since NILM is a hot topic nowadays, many open fields of research have not been tackled in detail within this paper. The robustness of the algorithms in the presence of appliances with similar consumption patterns should be analyzed since it could affect the performances in real-world applications. Moreover, improvements are desired in providing affordable smart meters with high sampling rates, to create many opportunities for improving disaggregation algorithms with techniques that cannot be used with presently available measurements.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}