
Insights on the Impacts of Accelerometer Location on the Dynamics and Characteristics of Complex Structures


Abstract
:1. Introduction
2. System’s Description and Experimental Setup
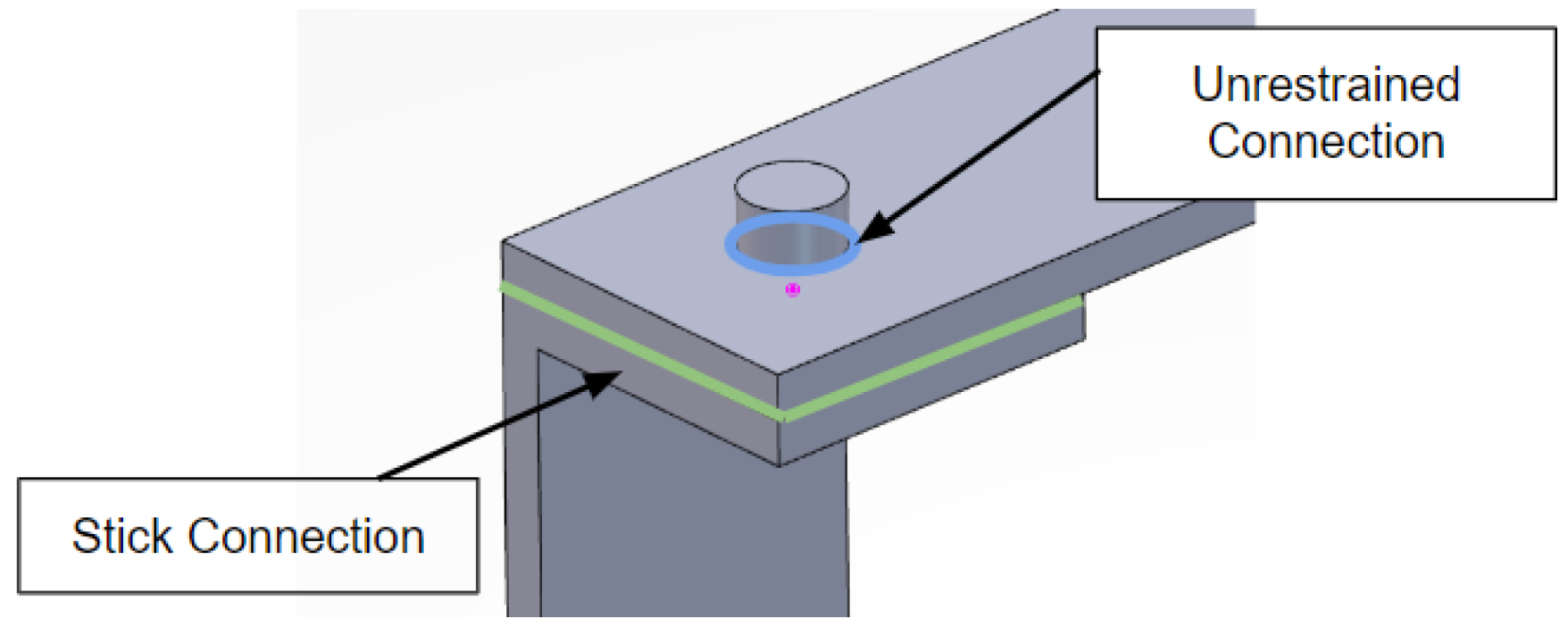
3. Finite Element Modeling: Effects of Accelerometer Location on the Modal Characteristics of the System
4. Experimental Results and Discussion
4.1. Free Vibration: Influence of the Accelerometer’s Placement on the First Mode of Vibration
4.1.1. Frequency Analysis: Time Dependence of the Damped Frequency of the System
4.1.2. Damping Characteristics and Dependence to Accelerometer’s Location
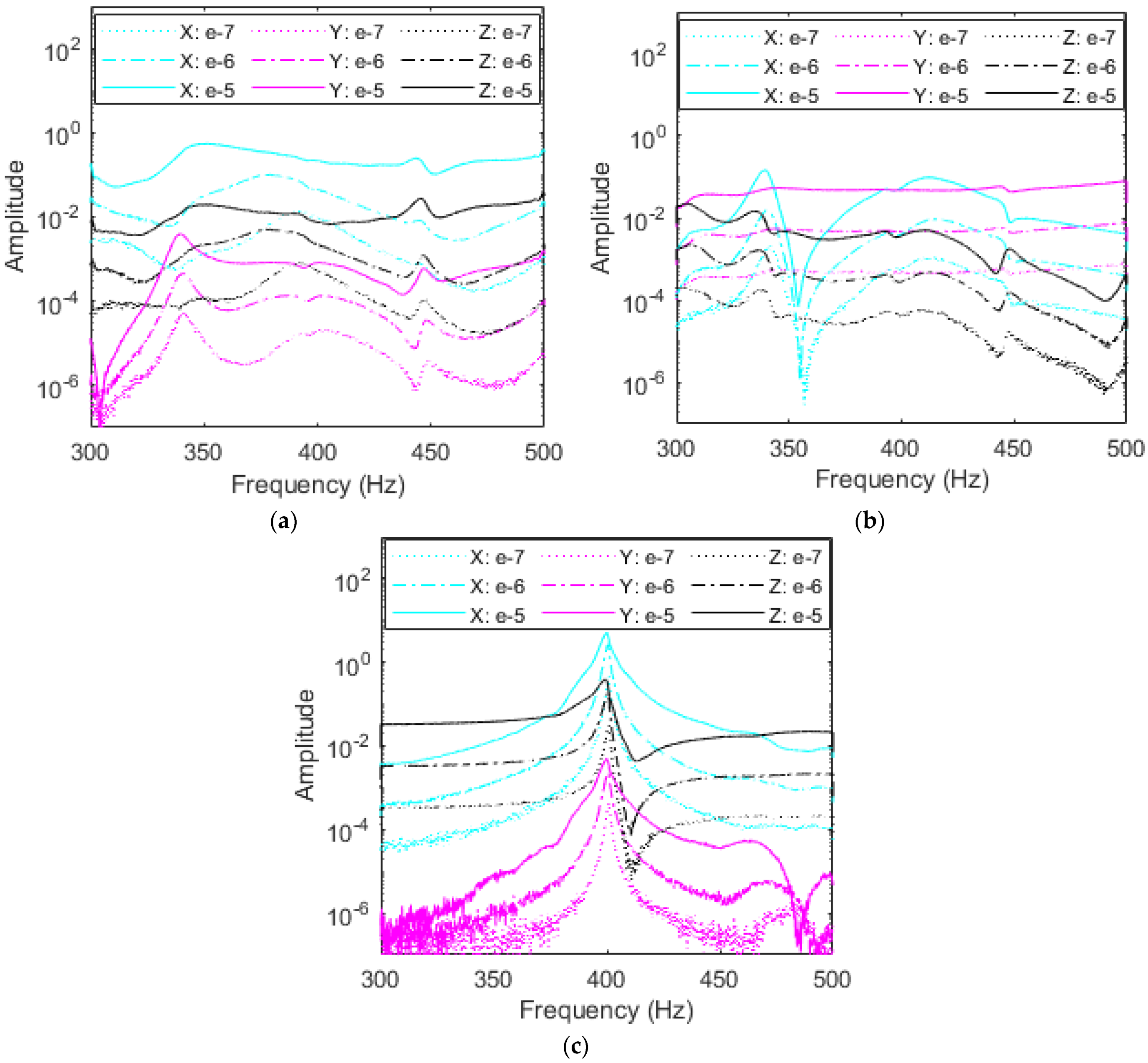
4.2. Random Vibration: Effects of the Accelerometer’s Location on the System’s Dynamics
4.2.1. Effects of the Accelerometer’s Location on the Resonant Frequencies
Right Accelerometer
Middle Accelerometer
Left Accelerometer
4.2.2. Dependence of Nonlinear Damping on Accelerometer’s Placement
4.2.3. Comparison of Accelerometer’s Location on the Resonant Frequencies of the RC System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, F.; Liu, J.B.; Bao, X.; Sun, Y.L.; Lu, X.H.; Wang, D. A scaled test on the damage and vibration behavior of reinforced concrete nuclear containment subjected to a large aircraft impact. Eng. Struct. 2022, 268, 114755. [Google Scholar] [CrossRef]
- Sarkar, S.; Breiffni, F. Fluid inerter for optimal vibration control of floating offshore wind turbine towers. Eng. Struct. 2022, 266, 114558. [Google Scholar] [CrossRef]
- Wu, D.; Lujin, L.; Haoyuan, R. Thermal/vibration joint experimental investigation on lightweight ceramic insulating material for hypersonic vehicles in extremely high-temperature environment up to 1500 °C. Ceram. Int. 2020, 46, 14439–14447. [Google Scholar] [CrossRef]
- Kodali, M.; Bharadwaj, P.; Bhavanam, S.; Karanjgaokar, N. Semi-analytical approach to determine interfacial adhesion in polymer-bonded explosives. Exp. Mech. 2022, 63, 237–250. [Google Scholar] [CrossRef]
- Shan, D.; Li, Q.; Khan, I.; Zhou, X. A novel finite element model updating method based on substructure and response surface model. Eng. Struct. 2015, 103, 147–156. [Google Scholar] [CrossRef]
- Schoenherr, T.F. Derivation of six degree of freedom shaker inputs using sub-structuring techniques. In Topics in Modal Analysis & Testing; Springer: Cham, Switzerland, 2019; Volume 9, pp. 5–14. [Google Scholar]
- Drozg, A.; Gregor, Č.; Miha, B. Full-degrees-of-freedom frequency based substructuring. Mech. Syst. Signal Process. 2018, 98, 570–579. [Google Scholar] [CrossRef]
- Li, J.; Law, S.S.; Ding, Y. Substructure damage identification based on response reconstruction in frequency domain and model updating. Eng. Struct. 2012, 41, 270–284. [Google Scholar] [CrossRef]
- Mahdiabadi, M.K.; Bartl, A.; Xu, D.; Tiso, P.; Rixen, D.J. An augmented free-interface-based modal substructuring for nonlinear structural dynamics including interface reduction. J. Sound Vib. 2019, 462, 114915. [Google Scholar] [CrossRef]
- Mayes, R.L. A modal Craig-Bampton substructure for experiments, analysis, control and specifications. In Dynamics of Coupled Structures; Springer: Cham, Switzerland, 2015; Volume 4, pp. 93–98. [Google Scholar]
- Mottershead, J.E. Model updating in structural dynamics: A survey. J. Sound Vib. 1993, 167, 347–375. [Google Scholar] [CrossRef]
- Dilworth, B.J.; Karlicek, A.; Thibault, L. An approach to component testing: An analytical study. In Proceedings of the 37th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 28–31 January 2019; Volume 7. [Google Scholar]
- Soine, D.E.; Jones, R.J.; Harvie, J.M.; Skousen, T.J.; Schoenherr, T.F. Designing hardware for the boundary condition round robin challenge. In Society for Experimental Mechanics Series, Proceedings of the 36th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 12–15 February 2018; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Bouma, A.; Campbell, A.; Roberts, T.; Taylor, S.; Haynes, C.; Harvey, D. Accumulated lifetimes in single-axis vibration testing. In Sensors and Instrumentation, Aircraft/Aerospace, Energy Harvesting & Dynamic Environments Testing, Proceedings of the 37th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 28–31 January 2019; Springer: Berlin/Heidelberg, Germany, 2020; Volume 7, pp. 131–146. [Google Scholar]
- Musella, U.; Blanco, M.A.; Mastrodicasa, D.; Monco, G.; Emilio, D.L.; Simone, M.; Peeters, B.; Mucchi, E.; Guillaume, P. Combining test and simulation to tackle the challenges derived from boundary conditions mismatches in environmental testing. In Sensors and Instrumentation, Aircraft/Aerospace, Energy Harvesting & Dynamic Environments Testing, Proceedings of the 37th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 28–31 January 2019; Springer: Berlin/Heidelberg, Germany, 2020; Volume 7, pp. 259–269. [Google Scholar]
- Smith, S.A.; Brake, M.R.W. Effects of multi-axial versus single-axial excitation of jointed systems. In Proceedings of the 37th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 28–31 January 2019; Volume 7, pp. 45–50. [Google Scholar]
- Larsen, W. Sensitivity Study of BARC Assembly. In Proceedings of the 37th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 28–31 January 2019; Volume 7. [Google Scholar]
- Takeshita, A.; Sedillo, H.; Jankowski, K.; Barba, J.; Bouma, A.; Billingsley, E.; Abdelkefi, A. Effects of test fixture connections and interference of the BARC structure on its dynamical responses. Int. J. Mech. Sci. 2022, 221, 107186. [Google Scholar] [CrossRef]
- Lopp, G.K.; Mayes, R.L. Using the Modal Craig-Bampton Procedure for the Test Planning of a Six-Degree-of-Freedom Shaker; No. SAND2019-12865C; Sandia National Lab (SNL-NM): Albuquerque, NM, USA, 2019. [Google Scholar]
- Schoenherr, T.F.; Clark, B.W.; Coffin, P. Improve Replication of in-Service Mechanical Environments; Sandia National Lab (SNL-NM): Albuquerque, NM, USA, 2018. [Google Scholar] [CrossRef]
- Schoenherr, T.F. Designing an Optimized Fixture for the BARC Hardware Using a Parameterized Model; No. SAND2019-12838C; Sandia National Lab (SNL-NM): Albuquerque, NM, USA, 2019. [Google Scholar]
- Daborn, P.M.; Roberts, C.; Ewins, D.J.; Ind, P.R. Next-generation random vibration tests. In Topics in Modal Analysis II; Springer: Cham, Switzerland, 2014; Volume 8, pp. 397–410. [Google Scholar]
- Paripovic, J.; Mayes, R.L. Reproducing a component field environment on a six degree-of-freedom shaker. In Proceedings of the 38th IMAC, a Conference and Exposition on Structural Dynamics, Houston, TX, USA, 10–13 February 2020; Volume 4. [Google Scholar]
- Napolitano, K.; Schmidt-Landin, M. Proposed 12-DOF shaker control of BARC structure. In Proceedings of the 38th IMAC, a Conference and Exposition on Structural Dynamics, Houston, TX, USA, 10–13 February 2020; Volume 4. [Google Scholar]
- Skousen, T.J.; Mayes, R.L. Mechanical environment test specifications derived from equivalent energy in fixed base modes. In Dynamic Substructures; Springer: Cham, Switzerland, 2021; Volume 4, pp. 27–41. [Google Scholar]
- Schoenherr, T.F.; Lee, J.K.; Porter, J. Using modal projection error to predict success of a six degree of freedom shaker test. In Dynamic Substructures; Springer: Cham, Switzerland, 2021; Volume 4. [Google Scholar]
- Hall, T.M. Analytically investigating impedance-matching test fixtures. In Proceedings of the 37th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 28–31 January 2019; Volume 7. [Google Scholar]
- Rothberg, S.J.; Allen, M.S.; Castellini, P.; Di Maio, D.; Dirckx, J.J.J.; Ewins, D.J.; Halkon, B.J.; Muyshondt, P.; Paone, N.; Ryan, T. An international review of laser Doppler vibrometry: Making light work of vibration measurement. Opt. Lasers Eng. 2017, 99, 11–22. [Google Scholar] [CrossRef]
- Warren, C.; Niezrecki, C.; Avitabile, P.; Pingle, P. Comparison of FRF measurements and mode shapes determined using optically image based, laser; accelerometer measurements. Mech. Syst. Signal Process. 2011, 25, 2191–2202. [Google Scholar] [CrossRef]
- Rodriguez, R.M.; Cristalli, C.; Paone, N. Comparative study between laser vibrometer and accelerometer measurements for mechanical fault detection of electric motors. In Proceedings of the Fifth International Conference on Vibration Measurements by Laser Techniques: Advances and Applications, Ancona, Italy, 18–21 June 2002; Volume 4827. [Google Scholar]
- Halkon, B.J.; Rothberg, S.J. Towards laser Doppler vibrometry from unmanned aerial vehicles. J. Phys. Conf. Ser. 2018, 1149, 012022. [Google Scholar] [CrossRef]
- Yuan, K.; Zhu, W.D. A novel general-purpose three-dimensional continuously scanning laser Doppler vibrometer system for full-field vibration measurement of a structure with a curved surface. J. Sound Vib. 2022, 540, 117274. [Google Scholar] [CrossRef]
- Wangchuk, S.; Siringoringo, D.M.; Fujino, Y. Vision-based vibration measurement of stay-cables by video motion magnification and dynamic mode decomposition. In Experimental Vibration Analysis for Civil Engineering Structures; Springer: Cham, Switzerland, 2023; pp. 149–162. [Google Scholar]
- Rossi, G.; Marsili, R.; Gusella, V.; Gioffre, M. Comparison between accelerometer and laser vibrometer to measure traffic excited vibrations on bridges. Shock. Vib. 2002, 9, 11–18. [Google Scholar] [CrossRef]
- Karle, A.D.; Bhoite, S.K.; Amale, A.B. An analysis of transducer mass loading effect inshaker testing. J. Eng. Res. Appl. 2014, 4, 207–212. [Google Scholar]
- Cakar, O.; Sanliturk, K.Y. Elimination of transducer mass loading effects from frequency response functions. Mech. Syst. Signal Process. 2005, 19, 87–104. [Google Scholar] [CrossRef]
- Bi, S.; Ren, J.; Wang, W.; Zong, G. Elimination of transducer mass loading effects in shaker modal testing. Mech. Syst. Signal Process. 2013, 38, 265–275. [Google Scholar] [CrossRef]
- Olvera, D.; Elías-Zúñiga, A.; Martínez-Romero, O.; López de Lacalle, L.N.; Martínez-Alfaro, H.; Siller, H.R.; Pineda, M.W. Improved predictions of the stability lobes for milling cutting operations of thin-wall components by considering ultra-miniature accelerometer mass effects. Int. J. Adv. Manuf. Technol. 2016, 86, 2139–2146. [Google Scholar] [CrossRef]
- Ren, J.; Wang, J.; Bi, S. Correction of transducers mass effects from the measured frfs in hammer impact testing. Shock. Vib. 2017, 2017, 6857326. [Google Scholar] [CrossRef]
- Baharin, N.H.; Rahman, R.A. Effect of accelerometer mass on thin plate vibration. J. Mek. 2009, 29, 100–111. [Google Scholar]
- Skousen, T.J.; Soine, D. Boundary Conditions in Environmental Testing Round Robin; No. SAND2018-12499C; Sandia National Lab: Albuquerque, NM, USA, 2018. [Google Scholar]
- Manring, L.H.; Mann, B.P.; Schultze, J.F. Modal analysis of the box assembly with removable component in two configurations. In Special Topics in Structural Dynamics & Experimental Techniques; Springer: Cham, Switzerland, 2021; Volume 5, pp. 271–281. [Google Scholar]
- Harvie, J.M.; Seijs, M.V.D. Application of transfer path analysis techniques to the boundary condition challenge problem. In Proceedings of the 37th IMAC, a Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 28–31 January 2019; Volume 7, pp. 157–166. [Google Scholar]
- Lacayo, R.; Pesaresi, L.; Groß, J.; Fochler, D.; Armand, J.; Salles, L.; Schwingshackl, C.; Allen, M.; Brake, M. Nonlinear modeling of structures with bolted joints: A comparison of two approaches based on a time-domain and frequency-domain solver. Mech. Syst. Signal Process. 2019, 114, 413–438. [Google Scholar] [CrossRef]
- Schwingshackl, C.W.; Di Maio, D.; Sever, I.; Green, J.S. Modeling and validation of the nonlinear dynamic behavior of bolted flange joints. J. Eng. Gas Turbines Power 2013, 135, 122504. [Google Scholar] [CrossRef]
- Li, D.; Xu, C.; Botto, D.; Zhang, Z.; Gola, M. A fretting test apparatus for measuring friction hysteresis of bolted joints. Tribol. Int. 2020, 151, 106431. [Google Scholar] [CrossRef]
- Balaji, N.N.; Chen, W.; Brake, M.R. Traction-based multi-scale nonlinear dynamic modeling of bolted joints: Formulation, application, and trends in micro-scale interface evolution. Mech. Syst. Signal Process. 2020, 139, 106615. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No Accelerometer | Left | Middle | Right | |||||
|---|---|---|---|---|---|---|---|---|
| Mode | S | U | S | U | S | U | S | U |
| 1 | 431.1 | 385.4 | 383.5 | 341.0 | 413.3 | 363.2 | 427.7 | 379.2 |
| 2 | 971.6 | 752.0 | 906.9 | 703.5 | 914.9 | 695.9 | 916.1 | 688.8 |
| 3 | 1262.8 | 893.2 | 1255.5 | 831.0 | 1100.0 | 769.1 | 1124.8 | 831.1 |
| Left | Middle | Right | ||||
|---|---|---|---|---|---|---|
| FEA | U | S | U | S | U | S |
| 341.1 | 383.5 | 363.2 | 413.3 | 379.2 | 427.7 | |
| Free | Soft | Stiff | Soft | Stiff | Soft | Stiff |
| 371.0–376.5 | 382.1–387.9 | 400.0–406.3 | 406.3–412.9 | 419.7–426.7 | 426.7–433.9 | |
| Location | t ≈ 0 | t → ∞ | Percent Change |
|---|---|---|---|
| Left | 0.014738 | 0.0091540 | −37.9% |
| Middle | 0.009329 | 0.005427 | −41.8% |
| Right | 0.006378 | 0.003458 | −45.8% |
| Left | Middle | Right | ||||
|---|---|---|---|---|---|---|
| U | S | U | S | U | S | |
| FEA | 341.1 | 383.5 | 363.2 | 413.3 | 379.2 | 427.7 |
| Min | Max | Min | Max | Min | Max | |
| Free | 371.0 | 387.9 | 400.0 | 412.9 | 419.7 | 433.9 |
| Random | 351.0 | 392.4 | 380.0 | 407.8 | 437.9 | 439.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takeshita, A.; Madrid, J.; Granillo, E.; Abdelkefi, A. Insights on the Impacts of Accelerometer Location on the Dynamics and Characteristics of Complex Structures. Sensors 2023, 23, 9830. https://doi.org/10.3390/s23249830
Takeshita A, Madrid J, Granillo E, Abdelkefi A. Insights on the Impacts of Accelerometer Location on the Dynamics and Characteristics of Complex Structures. Sensors. 2023; 23(24):9830. https://doi.org/10.3390/s23249830
Chicago/Turabian StyleTakeshita, Adam, Jonah Madrid, Ezekiel Granillo, and Abdessattar Abdelkefi. 2023. "Insights on the Impacts of Accelerometer Location on the Dynamics and Characteristics of Complex Structures" Sensors 23, no. 24: 9830. https://doi.org/10.3390/s23249830