
Prediction of Three-Directional Ground Reaction Forces during Walking Using a Shoe Sole Sensor System and Machine Learning


Abstract
:1. Introduction
2. Methods
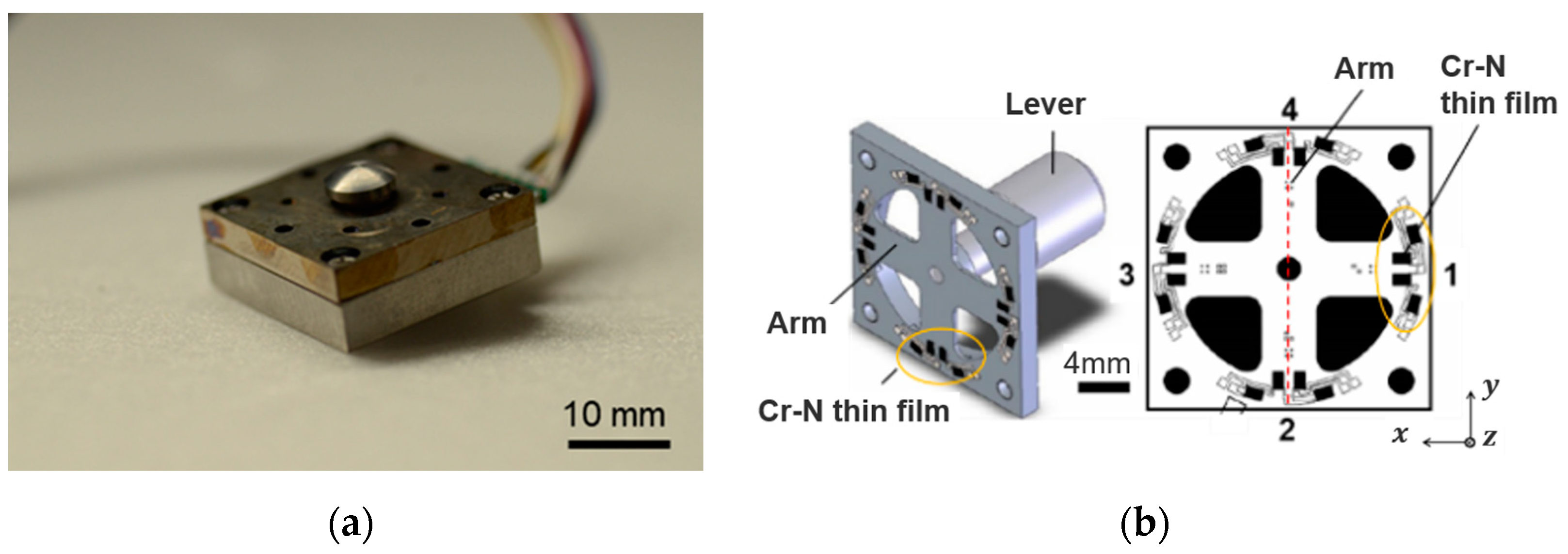
2.1. Sole Sensor System Using a Cr–N Strain-Sensitive Thin Film
2.2. Participants
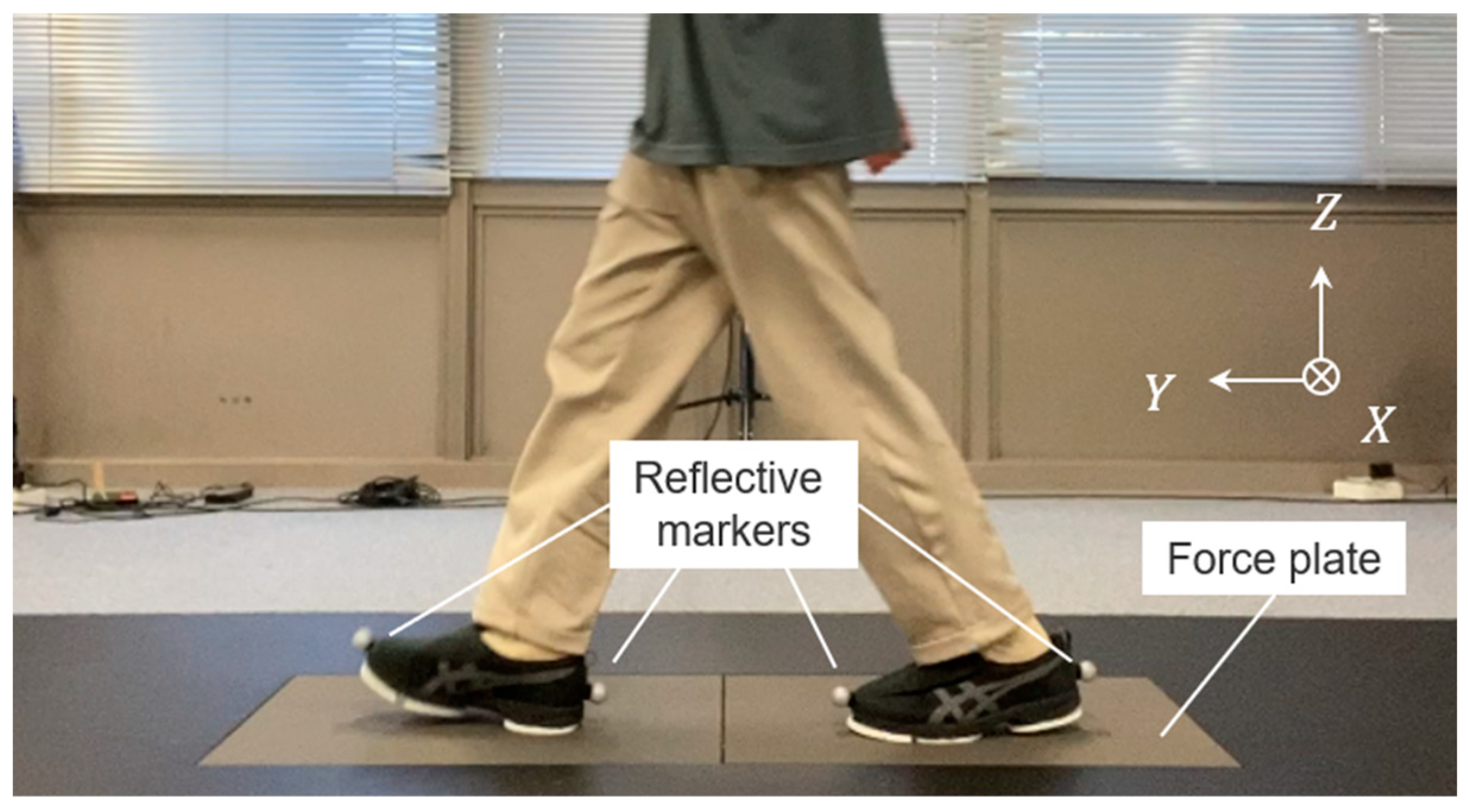
2.3. Experimental Procedure
2.4. Data Analysis
2.4.1. Data Preprocessing
2.4.2. Machine Learning Models
3. Results
3.1. Estimation of GRFs Using the Data of Each Movement
3.2. Estimation of GRFs Using Data of All Movements
4. Discussion
4.1. Difference in Prediction Accuracy by Direction
4.2. Difference in Prediction Accuracy by Movement
4.3. Difference in Prediction Accuracy by Regression Models
4.4. Study Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Laroche, D.P.; Cook, S.B.; Mackala, K. Strength asymmetry increases gait asymmetry and variability in older women. Med. Sci. Sports Exerc. 2012, 44, 2172–2181. [Google Scholar] [CrossRef]
- Hsiao, H.; Gray, V.L.; Creath, R.A.; Binder-Macleod, S.A.; Rogers, M.W. Control of lateral weight transfer is associated with walking speed in individuals post-stroke. J. Biomech. 2017, 60, 72–78. [Google Scholar] [CrossRef]
- Franz, J.R.; Maletis, M.; Kram, R. Real-time feedback enhances forward propulsion during walking in old adults. Clin. Biomech. 2014, 29, 68–74. [Google Scholar] [CrossRef] [PubMed]
- Eltoukhy, M.; Kuenze, C.; Andersen, M.S.; Oh, J.; Signorile, J. Prediction of ground reaction forces for Parkinson’s disease patients using a kinect-driven musculoskeletal gait analysis model. Med. Eng. Phys. 2017, 50, 75–82. [Google Scholar] [CrossRef] [PubMed]
- Skals, S.; Rasmussen, K.P.; Bendtsen, K.M.; Yang, J.; Andersen, M.S. A musculoskeletal model driven by dual Microsoft Kinect sensor data. Multibody Syst. Dyn. 2017, 41, 297–316. [Google Scholar] [CrossRef]
- Liu, M.M.; Herzog, W.; Savelberg, H.H.C.M. Dynamic muscle force predictions from EMG: An artificial neural network approach. J. Electromyogr. Kinesiol. 1999, 9, 391–400. [Google Scholar] [CrossRef]
- Shahabpoor, E.; Pavic, A. Estimation of vertical walking ground reaction force in real-life environments using single IMU sensor. J. Biomech. 2018, 79, 181–190. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Pascual, D.; Catalán, J.M.; Blanco-Ivorra, A.; Sanchís, M.; Arán-Ais, F.; García-Aracil, N. Estimating vertical ground reaction forces during gait from lower limb kinematics and vertical acceleration using wearable inertial sensors. Front. Bioeng. Biotechnol. 2023, 29, 1199459. [Google Scholar] [CrossRef]
- Patoz, A.; Lussiana, T.; Breine, B.; Gindre, C.; Malatesta, D. A Single Sacral-Mounted Inertial Measurement Unit to Estimate Peak Vertical Ground Reaction Force, Contact Time, and Flight Time in Running. Sensors 2022, 22, 784. [Google Scholar] [CrossRef]
- Tan, T.; Chiasson, D.P.; Hu, H.; Shull, P.B. Influence of IMU position and orientation placement errors on ground reaction force estimation. J. Biomech. 2019, 97, 109416. [Google Scholar] [CrossRef]
- Bamberg, S.J.M.; Benbasat, A.Y.; Scarborough, D.M.; Krebs, D.E.; Paradiso, J.A. Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef]
- Sazonov, E.S.; Fulk, G.; Hill, J.; Schutz, Y.; Browning, R. Monitoring of posture allocations and activities by a shoe-based wearable sensor. IEEE Trans. Bio-Med. Eng. 2011, 58, 983–990. [Google Scholar] [CrossRef]
- Redd, C.B.; Bamberg, S.J.M. A wireless sensory feedback device for real-time gait feedback and training. IEEE/ASME Trans. Mechatron. 2012, 17, 425–433. [Google Scholar] [CrossRef]
- Dyer, P.S.; Bamberg, S.J.M. Instrumented insole vs. force plate: A comparison of center of plantar pressure. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, Boston, MA, USA, 30 August–3 September 2011; Volume 2011, pp. 6805–6809. [Google Scholar] [CrossRef]
- Howell, A.M.; Kobayashi, T.; Chou, T.R.; Daly, W.; Orendurff, M.; Bamberg, S.J.M. A laboratory insole for analysis of sensor placement to determine ground reaction force and ankle moment in patients with stroke. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, San Diego, CA, USA, 28 August–1 September 2012; Volume 2012, pp. 6394–6397. [Google Scholar] [CrossRef]
- Fong, D.T.P.; Chan, Y.Y.; Hong, Y.; Yung, P.S.H.; Fung, K.Y.; Chan, K.M. Estimating the complete ground reaction forces with pressure insoles in walking. J. Biomech. 2008, 41, 2597–2601. [Google Scholar] [CrossRef]
- Howell, A.M.; Kobayashi, T.; Hayes, H.A.; Foreman, K.B.; Bamberg, S.J.M. Kinetic gait analysis using a low-cost insole. IEEE Trans. Bio-Med. Eng. 2013, 60, 3284–3290. [Google Scholar] [CrossRef] [PubMed]
- Pu, F.; Yang, Y.; Fan, X.; Li, S.; Li, Y.; Li, D.; Fan, Y. Optimal estimation of total plantar force for monitoring gait in daily life activities with low-price insole system. J. Mech. Med. Biol. 2014, 14, 1450037. [Google Scholar] [CrossRef]
- Rouhani, H.; Favre, J.; Crevoisier, X.; Aminian, K. Ambulatory assessment of 3D ground reaction force using plantar pressure distribution. Gait Posture 2010, 32, 311–316. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, D.A.; Ferris, D.P. Estimation of ground reaction forces and ankle moment with multiple, low-cost sensors. J. NeuroEngineering Rehabil. 2015, 12, 90. [Google Scholar] [CrossRef]
- Sim, T.; Kwon, H.; Oh, S.E.; Joo, S.B.; Choi, A.; Heo, H.M.; Kim, K.; Mun, J.H. Predicting complete ground reaction forces and moments during gait with insole plantar pressure information using a wavelet neural network. J. Biomech. Eng. 2015, 137, 091001. [Google Scholar] [CrossRef]
- Schepers, H.M.; Van Asseldonk, E.H.F.; Buurke, J.H.; Veltink, P.H. Ambulatory estimation of center of mass displacement during walking. IEEE Trans. Bio-Med. Eng. 2009, 56, 1189–1195. [Google Scholar] [CrossRef]
- Adachi, W. Development of walking analysis system using by motion sensor with mobile force plate. Trans. JSME 2012, 78, 1607–1616. [Google Scholar] [CrossRef]
- Moriyasu, K.; Nishiwaki, T.; Yamaguchi, T.; Hokkirigawa, K. New technique of three directional ground reaction force distributions. Footwear Sci. 2010, 2, 57–64. [Google Scholar] [CrossRef]
- Yamaguchi, T. Distribution of the local required coefficient of friction in the shoe–floor contact area during straight walking: Pilot study. Biotribology 2019, 19, 100101. [Google Scholar] [CrossRef]
- Niwa, E.; Shirakawa, K.; Shingyochi, S.; Xiong, S.; Nakahara, K.; Ito, T.; Sasaki, Y. Load vector sensors using strain sensitive cr-n thin films and their application. IEEJ Trans. Sens. Micromach. 2014, 134, 132–139. [Google Scholar] [CrossRef]
- Niwa, E.; Sasaki, Y. Cr-N strain sensitive thin films and their pressure sensor applications. IEEJ Trans. Sens. Micromach. 2014, 134, 385–391. [Google Scholar] [CrossRef]
- Rasmussen, C.E. Gaussian processes in machine learning. Lect. Notes Comput. Sci. 2004, 3176, 63–71. [Google Scholar] [CrossRef]
- Eguchi, R.; Takahashi, M. Insole-based estimation of vertical ground reaction force using one-step learning with probabilistic regression and data augmentation. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1217–1225. [Google Scholar] [CrossRef]
- Wen, Y.; Li, B.; Chen, D.; Zhu, T. Reliability and validity analysis of personality assessment model based on gait video. Front. Behav. Neurosci. 2022, 16, 901568. [Google Scholar] [CrossRef]
- Raja, M.N.A.; Abdoun, T.; El-Sekelly, W. Smart prediction of liquefaction-induced lateral spreading. J. Rock Mech. Geotech. Eng. 2023; in press. [Google Scholar] [CrossRef]
- Burnfield, J.M.; Power, C.M. The role of center of mass kinematics in predicting peak utilized coefficient of friction during walking. J. Forensic Sci. 2007, 52, 1328–1333. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Yano, M.; Onodera, H.; Hokkirigawa, K. Kinematics of center of mass and center of pressure predict friction requirement at shoe-floor interface during walking. Gait Posture 2013, 38, 209–214. [Google Scholar] [CrossRef] [PubMed]
- Hase, K.; Stein, R.B. Turning strategies during human walking. J. Neurophysiol. 1999, 81, 2914–2922. [Google Scholar] [CrossRef]
- Taylor, M.J.D.; Dabnichhi, P.; Strike, S.C. A three-dimensional biomechanical comparison between turning strategies during the stance phase of walking. Hum. Mov. Sci. 2005, 24, 558–573. [Google Scholar] [CrossRef]
- Honert, E.C.; Hoitz, F.; Blades, S.; Nigg, S.R.; Nigg, B.M. Estimating Running Ground Reaction Forces from Plantar Pressure during Graded Running. Sensors 2022, 22, 3338. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Gait | Regression Model | x | y | z | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MAE | %RMSE | R2 | MAE | %RMSE | R2 | MAE | %RMSE | R2 | ||
| Straight walking | MLR | 0.067 ± 0.044 | 12.8 ± 4.3 | 0.551 ± 0.217 | 0.121 ± 0.104 | 9.5 ± 3.3 | 0.819 ± 0.071 | 0.617 ± 0.432 | 10.8 ± 4.5 | 0.682 ± 0.161 |
| GPR | 0.047 ± 0.034 | 9.8 ± 2.7 | 0.706 ± 0.215 | 0.111 ± 0.090 | 6.2 ± 1.4 | 0.916 ± 0.066 | 0.237 ± 0.209 | 4.9 ± 2.2 | 0.917 ± 0.067 | |
| Side-step turning | MLR | 0.102 ± 0.063 | 12.1 ± 2.6 | 0.673 ± 0.199 | 0.196 ± 0.160 | 11.3 ± 3.1 | 0.743 ± 0.193 | 0.460 ± 0.345 | 11.1 ± 4.4 | 0.674 ± 0.165 |
| GPR | 0.072 ± 0.059 | 9.7 ± 2.2 | 0.755 ± 0.251 | 0.129 ± 0.187 | 7.5 ± 1.7 | 0.840 ± 0.458 | 0.195 ± 0.171 | 4.9 ± 1.7 | 0.922 ± 0.067 | |
| Cross-step turning | MLR | 0.106 ± 0.092 | 20.1 ± 5.5 | 0.281 ± 1.629 | 0.178 ± 0.129 | 11.1 ± 2.9 | 0.752 ± 0.124 | 0.517 ± 0.340 | 12.3 ± 4.9 | 0.606 ± 0.176 |
| GPR | 0.062 ± 0.055 | 13.8 ± 2.2 | 0.378 ± 0.541 | 0.124 ± 0.114 | 7.6 ± 1.2 | 0.867 ± 0.156 | 0.177 ± 0.186 | 5.1 ± 2.0 | 0.911 ± 0.107 | |
| Regression Model | x | y | z | ||||||
|---|---|---|---|---|---|---|---|---|---|
| MAE | %RMSE | R2 | MAE | %RMSE | R2 | MAE | %RMSE | R2 | |
| MLR | 0.222 ± 0.221 | 24.4 ± 6.6 | −0.943 ± 2.478 | 0.181 ± 0.143 | 11.3 ± 3.1 | 0.749 ± 0.178 | 0.523 ±0.383 | 11.8 ± 4.7 | 0.630 ± 0.176 |
| GPR | 0.120 ± 0.115 | 17.5 ± 3.5 | −0.054 ± 1.501 | 0.115 ±0.102 | 6.9 ± 1.0 | 0.894 ± 0.122 | 0.198 ± 0.168 | 5.2 ± 2.2 | 0.913 ± 0.063 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamaguchi, T.; Takahashi, Y.; Sasaki, Y. Prediction of Three-Directional Ground Reaction Forces during Walking Using a Shoe Sole Sensor System and Machine Learning. Sensors 2023, 23, 8985. https://doi.org/10.3390/s23218985
Yamaguchi T, Takahashi Y, Sasaki Y. Prediction of Three-Directional Ground Reaction Forces during Walking Using a Shoe Sole Sensor System and Machine Learning. Sensors. 2023; 23(21):8985. https://doi.org/10.3390/s23218985
Chicago/Turabian StyleYamaguchi, Takeshi, Yuya Takahashi, and Yoshihiro Sasaki. 2023. "Prediction of Three-Directional Ground Reaction Forces during Walking Using a Shoe Sole Sensor System and Machine Learning" Sensors 23, no. 21: 8985. https://doi.org/10.3390/s23218985