
Long Short-Term Memory Neural Networks for Modeling Dynamical Processes and Predictive Control: A Hybrid Physics-Informed Approach

Abstract
:1. Introduction
- FP models demand meticulous process descriptions and accurate parameter values but offer unparalleled modeling precision across a wide operating range, even in abnormal situations. In practice, however, the values of some model parameters may be imprecise or unknown.
- In contrast, data-driven black-box models, including support-vector machines (SVM) [18], multi-layer perceptron (MLP) neural networks [19,20], radial basis function (RBF) networks [21], and recurrent long short-term memory networks (LSTM) [22,23], require no prior domain expertise. Among these, gated recurrent unit (GRU) has gained traction in modeling dynamic systems [24,25] and integrating with MPC algorithms [23,26,27]. Neural networks models have proven to be very useful, especially when dealing with complex dynamical processes, such as predator–prey systems [28,29,30]. However, black-box models may struggle when the available dataset lacks coverage for certain process variables, particularly those operating at infrequent points.
2. Hybrid Physics-Informed Models Using LSTM Neural Networks
- The process input and output variables, i.e., the manipulated and controlled variables, respectively, must be measurable. State variables may be measured or observed using a state estimation, e.g., in the form of an extended Kalman filter (EKF).
- The FP process should exist in the form of a set of differential equations and, when necessary, additional algebraic relations based on the fundamental laws of physics governing the process.
2.1. Model Structure
2.2. First-Principle Sub-Model
2.3. LSTM Sub-Model
- The forget gate f determines which values from the previous cell state should be retained and which should be discarded.
- The input gate i selects values from both the previous hidden state and the current input for updating purposes.
- The cell state candidate gate g initially regulates the flow of information within the network and subsequently computes the candidate value for the current cell state.
- The output gate o is responsible for calculating the new hidden state ‘h’.
2.4. Fuzzy Data Fusion Block
2.5. Model Development Procedure
- We determine the number of distinct training datasets that can be derived from the process measurements.
- We conduct training of the LSTM network for each training dataset.
- We implement a discrete FP model of the process.
- We select the initial shape and range of the membership function within the DF block.
- We deliver the outputs of the LSTM sub-models and the output of the FP model as inputs of the DF block, where their fusion is carried out based on the current operational state of the process. This fusion process determines the output of the PIHNN model.
- We assess the quality of PIHNN modeling. If it proves unsatisfactory, then it becomes necessary to modify the shape of the membership function.
- We adjust the membership function’s shape, which can be executed manually, drawing upon expert knowledge, or using an optimization procedure.
3. LSTM PIHNN Models in Predictive Control
3.1. Basic Predictive Control Problem Formulation
3.2. Nonlinear MPC Optimization for PIHNN Models
3.3. Quadratic MPC Optimization for PIHNN Models
- : a diagonal matrix with diagonal entries equal to the weighting coefficient ;
- : a vector of length , where all elements are equal to ;
- : a vector of length , where all elements are equal to ;
- : a vector of length , where all elements are equal to ;
- : a vector of length , where all elements are equal to ;
- : a vector of length N, where all elements are equal to ;
- : a vector of length N, where all elements are equal to .
3.4. PIHNN Prediction
3.5. LSTM Model Prediction
3.6. FP Model Prediction
3.7. PIHNN Model Derivatives
3.8. LSTM Model Derivatives
3.9. FP Model Derivatives
4. Results
4.1. Polymerization Process Description
4.2. First-Principle Model for Polymerization Process and Its Use in MPC
4.3. LSTM Model for Polymerization Process
- dataset 1 has been collected for the range of the manipulated variable , which results in the controlled variable .
- dataset 2 has been collected for which results in .
- the number of neurons ;
- the order of dynamics .
4.4. Modeling Quality of LSTM and FP Models
4.5. Development of PIHNN Models
- PIHNN model ver. 1—initial trapezoidal functions;
- PIHNN model ver. 2—optimized trapezoidal functions;
- PIHNN model ver. 3—initial trapezoidal functions;
- PIHNN model ver. 4—optimized trapezoidal functions;
- PIHNN model ver. 5—initial trapezoidal functions;
- PIHNN model ver. 6—optimized trapezoidal functions.
4.6. PIHNN Modeling Quality
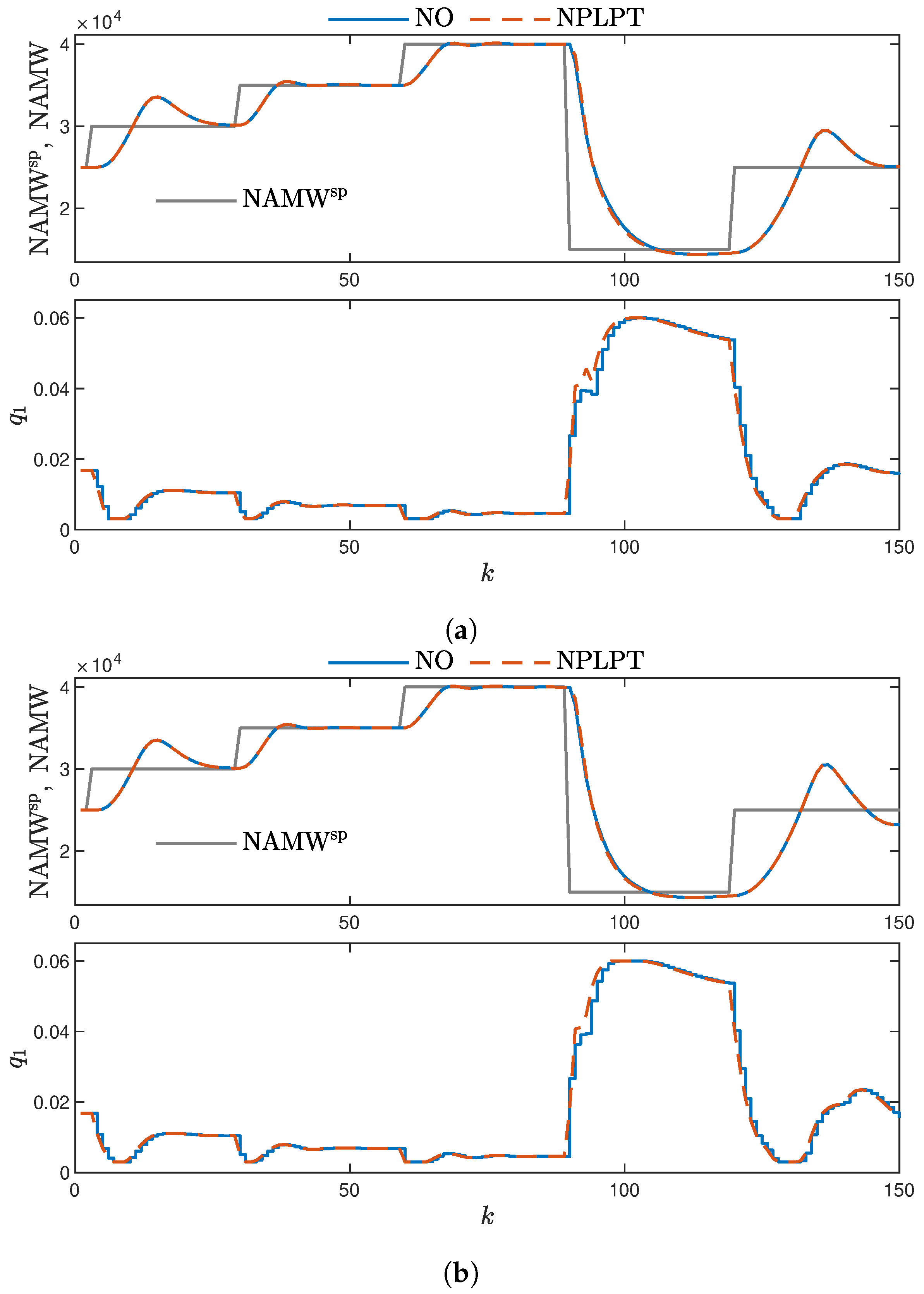
4.7. Validation of MPC Algorithms Using PIHNN Models
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Camacho, E.F.; Bordons, C. Model Predictive Control; Springer: London, UK, 1999. [Google Scholar]
- Tatjewski, P. Advanced Control of Industrial Processes, Structures and Algorithms; Springer: London, UK, 2007. [Google Scholar]
- Hosen, M.A.; Hussain, M.A.; Mjalli, F.S. Control of polystyrene batch reactors using neural network based model predictive control (NNMPC): An experimental investigation. Control. Eng. Pract. 2011, 19, 454–467. [Google Scholar] [CrossRef]
- Wang, B.; Shahzad, M.; Zhu, X.; Rehman, K.U.; Uddin, S. A Non-linear Model Predictive Control Based on Grey-Wolf Optimization Using Least-Square Support Vector Machine for Product Concentration Control in l-Lysine Fermentation. Sensors 2020, 20, 3335. [Google Scholar] [CrossRef]
- Assandri, A.D.; de Prada, C.; Rueda, A.; Martínez, J.S. Nonlinear parametric predictive temperature control of a distillation column. Control. Eng. Pract. 2013, 21, 1795–1806. [Google Scholar] [CrossRef]
- Carli, R.; Cavone, G.; Ben Othman, S.; Dotoli, M. IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings. Sensors 2020, 20, 781. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances. ISA Trans. 2011, 19, 1195–1207. [Google Scholar] [CrossRef]
- Gruber, J.K.; Doll, M.; Bordons, C. Design and experimental validation of a constrained MPC for the air feed of a fuel cell. Control. Eng. Pract. 2009, 17, 874–885. [Google Scholar] [CrossRef]
- Lima, P.F.; Pereira, G.C.; Mårtensson, J.; Wahlberg, B. Experimental validation of model predictive control stability for autonomous driving. Control. Eng. Pract. 2018, 81, 244–255. [Google Scholar] [CrossRef]
- Yao, F.; Yang, C.; Liu, X.; Zhang, M. Experimental Evaluation on Depth Control Using Improved Model Predictive Control for Autonomous Underwater Vehicle (AUVs). Sensors 2018, 18, 2321. [Google Scholar] [CrossRef]
- Ding, Z.; Sun, C.; Zhou, M.; Liu, Z.; Wu, C. Intersection Vehicle Turning Control for Fully Autonomous Driving Scenarios. Sensors 2021, 21, 3995. [Google Scholar] [CrossRef]
- Bassolillo, S.R.; D’Amato, E.; Notaro, I.; Blasi, L.; Mattei, M. Decentralized Mesh-Based Model Predictive Control for Swarms of UAVs. Sensors 2020, 20, 4324. [Google Scholar] [CrossRef]
- Xiong, L.; Fu, Z.; Zeng, D.; Leng, B. An Optimized Trajectory Planner and Motion Controller Framework for Autonomous Driving in Unstructured Environments. Sensors 2021, 21, 4409. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H, and Nonlinear Approaches; John Wiley and Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Karimshoushtari, M.; Novara, C.; Tango, F. How Imitation Learning and Human Factors Can Be Combined in a Model Predictive Control Algorithm for Adaptive Motion Planning and Control. Sensors 2021, 21, 4012. [Google Scholar] [CrossRef]
- Miller, A.; Rybczak, M.; Rak, A. Towards the Autonomy: Control Systems for the Ship in Confined and Open Waters. Sensors 2021, 21, 2286. [Google Scholar] [CrossRef]
- Bacci di Capaci, R.; Vaccari, M.; Pannocchia, G. Model predictive control design for multivariable processes in the presence of valve stiction. J. Process. Control. 2018, 71, 25–34. [Google Scholar] [CrossRef]
- Ławryńczuk, M. Modelling and predictive control of a neutralisation reactor using sparse Support Vector Machine Wiener models. Neurocomputing 2016, 205, 311–328. [Google Scholar] [CrossRef]
- Ławryńczuk, M. Nonlinear Predictive Control Using Wiener Models: Computationally Efficient Approaches for Polynomial and Neural Structures; Studies in Systems, Decision and Control; Springer: Cham, Switzerland, 2022; Volume 389. [Google Scholar]
- Ławryńczuk, M. Computationally Efficient Model Predictive Control Algorithms: A Neural Network Approach; Studies in Systems, Decision and Control; Springer: Cham, Switzerland, 2014; Volume 3. [Google Scholar]
- Balla, K.M.; Nørgaard, J.T.; Bendtsen, J.D.; Kallesøe, C.S. Model Predictive Control using linearized Radial Basis Function Neural Models for Water Distribution Networks. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 368–373. [Google Scholar]
- Schwedersky, B.B.; Flesch, R.C.C.; Dangui, H.A.S. Practical nonlinear model predictive control algorithm for Long Short-Term Memory networks. IFAC-PapersOnLine 2019, 52, 468–473. [Google Scholar] [CrossRef]
- Zarzycki, K.; Ławryńczuk, M. Advanced predictive control for GRU and LSTM networks. Inf. Sci. 2022, 616, 229–254. [Google Scholar] [CrossRef]
- Wang, Y. A new concept using LSTM Neural Networks for dynamic system identification. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 5324–5329. [Google Scholar]
- Jordan, I.D.; Sokół, P.A.; Park, I.M. Gated Recurrent Units Viewed Through the Lens of Continuous Time Dynamical Systems. Front. Comput. Neurosci. 2021, 15, 678158. [Google Scholar] [CrossRef]
- Bonassi, F.; da Silva, C.F.O.; Scattolini, R. Nonlinear MPC for Offset-Free Tracking of systems learned by GRU Neural Networks. IFAC-PapersOnLine 2021, 54, 54–59. [Google Scholar] [CrossRef]
- Zarzycki, K.; Ławryńczuk, M. LSTM and GRU Neural Networks as Models of Dynamical Processes Used in Predictive Control: A Comparison for Two Chemical Reactors. Sensors 2021, 21, 5625. [Google Scholar] [CrossRef]
- Li Ping, Z.; Min, X.; Hui-Nan, W. Hybrid control of bifurcation in a predator-prey system with three delays. Acta Phys. Sin. 2011, 60, 010506. [Google Scholar] [CrossRef]
- Lu, L.; Huang, C.; Song, X. Bifurcation control of a fractional-order PD control strategy for a delayed fractional-order prey–predator system. Eur. Phys. J. Plus 2023, 138, 77. [Google Scholar] [CrossRef]
- Xu, C.; Cui, X.; Li, P.; Yan, J.; Yao, L. Exploration on dynamics in a discrete predator–prey competitive model involving feedback controls. J. Biol. Dyn. 2023, 17, 2220349. [Google Scholar] [CrossRef]
- Alhajeri, M.S.; Luo, J.; Wu, Z.; Albalawi, F.; Christofides, P.D. Process structure-based recurrent neural network modeling for predictive control: A comparative study. Chem. Eng. Res. Des. 2022, 179, 77–89. [Google Scholar] [CrossRef]
- Roehrl, M.A.; Runkler, T.A.; Brandtstetter, V.; Tokic, M.; Obermayer, S. Modeling System Dynamics with Physics-Informed Neural Networks Based on Lagrangian Mechanics. IFAC-PapersOnLine 2020, 53, 9195–9200. [Google Scholar] [CrossRef]
- Yang, L.; Meng, X.; Karniadakis, G.E. B-PINNs: Bayesian physics-informed neural networks for forward and inverse PDE problems with noisy data. J. Comput. Phys. 2021, 425, 109913. [Google Scholar] [CrossRef]
- Nascimento, R.G.; Fricke, K.; Viana, F.A. A tutorial on solving ordinary differential equations using Python and hybrid physics-informed neural network. Eng. Appl. Artif. Intell. 2020, 96, 103996. [Google Scholar] [CrossRef]
- Antonelo, E.A.; Camponogara, E.; Seman, L.O.; de Souza, E.R.; Jordanou, J.P.; Hübner, J.F. Physics-Informed Neural Nets-based Control. arXiv 2021, arXiv:2104.02556. [Google Scholar]
- Bolderman, M.; Lazar, M.; Butler, H. Physics–Guided Neural Networks for Inversion–based Feedforward Control applied to Linear Motors. In Proceedings of the 2021 IEEE Conference on Control Technology and Applications (CCTA), San Diego, CA, USA, 9–11 August 2021; pp. 1115–1120. [Google Scholar]
- Wang, R.; Yu, R. Physics-Guided Deep Learning for Dynamical Systems: A Survey. arXiv 2021, arXiv:2107.01272. [Google Scholar]
- Nascimento, R.G.; Corbetta, M.; Kulkarni, C.S.; Viana, F.A. Hybrid physics-informed neural networks for lithium-ion battery modeling and prognosis. J. Power Sources 2021, 513, 230526. [Google Scholar]
- Shi, R.; Mo, Z.; Di, X. Physics-Informed Deep Learning for Traffic State Estimation: A Hybrid Paradigm Informed By Second-Order Traffic Models. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 540–547. [Google Scholar]
- Daw, A.; Karpatne, A.; Watkins, W.; Read, J.; Kumar, V. Physics-guided Neural Networks (PGNN): An Application in Lake Temperature Modeling. arXiv 2017, arXiv:1710.11431. [Google Scholar]
- Zarzycki, K.; Ławryńczuk, M. Physics-Informed Hybrid Neural Network Model for MPC: A Fuzzy Approach. Lecture Notes in Networks and Systems; Pawełczyk, M., Bismor, D., Ogonowski, S., Kacprzyk, J., Eds.; Springer Nature Switzerland: Cham, Switzerland, 2023; Volume 708, pp. 183–192. [Google Scholar]
- Hochreiter, S. Untersuchungen zu dynamischen neuronalen Netzen. Master’s Thesis, Technical University Munich, Munich, Germany, 1991. [Google Scholar]
- Doyle, F.J.; Ogunnaike, B.A.; Pearson, R. Nonlinear model-based control using second-order Volterra models. Automatica 1995, 31, 697–714. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Type | MPC-NO | MPC-NPLPT |
|---|---|---|
| PIHNN ver. 1 | 3.051 | 3.116 |
| PIHNN ver. 2 | 3.031 | 3.095 |
| PIHNN ver. 3 | 3.205 | 3.263 |
| PIHNN ver. 4 | 3.220 | 3.290 |
| PIHNN ver. 5 | 2.935 | 2.741 |
| PIHNN ver. 6 | 2.965 | 3.020 |
| Model Type | MPC-NO | MPC-NPLPT |
|---|---|---|
| PIHNN ver. 1 | 94.4% | 22.4% |
| PIHNN ver. 2 | 97.2% | 23.1% |
| PIHNN ver. 3 | 100.0% | 21.0% |
| PIHNN ver. 4 | 97.2% | 23.1% |
| PIHNN ver. 5 | 89.3% | 24.5% |
| PIHNN ver. 6 | 93.7% | 23.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zarzycki, K.; Ławryńczuk, M. Long Short-Term Memory Neural Networks for Modeling Dynamical Processes and Predictive Control: A Hybrid Physics-Informed Approach. Sensors 2023, 23, 8898. https://doi.org/10.3390/s23218898
Zarzycki K, Ławryńczuk M. Long Short-Term Memory Neural Networks for Modeling Dynamical Processes and Predictive Control: A Hybrid Physics-Informed Approach. Sensors. 2023; 23(21):8898. https://doi.org/10.3390/s23218898
Chicago/Turabian StyleZarzycki, Krzysztof, and Maciej Ławryńczuk. 2023. "Long Short-Term Memory Neural Networks for Modeling Dynamical Processes and Predictive Control: A Hybrid Physics-Informed Approach" Sensors 23, no. 21: 8898. https://doi.org/10.3390/s23218898