
Revolutionizing Urban Mobility: IoT-Enhanced Autonomous Parking Solutions with Transfer Learning for Smart Cities
 , , , , and
, , , , and
Abstract
:1. Introduction
1.1. Problem Statement
1.2. Research Motivations
- Rapid urbanization has led to a surge in the number of vehicles on the road, resulting in chronic traffic congestion in many cities.
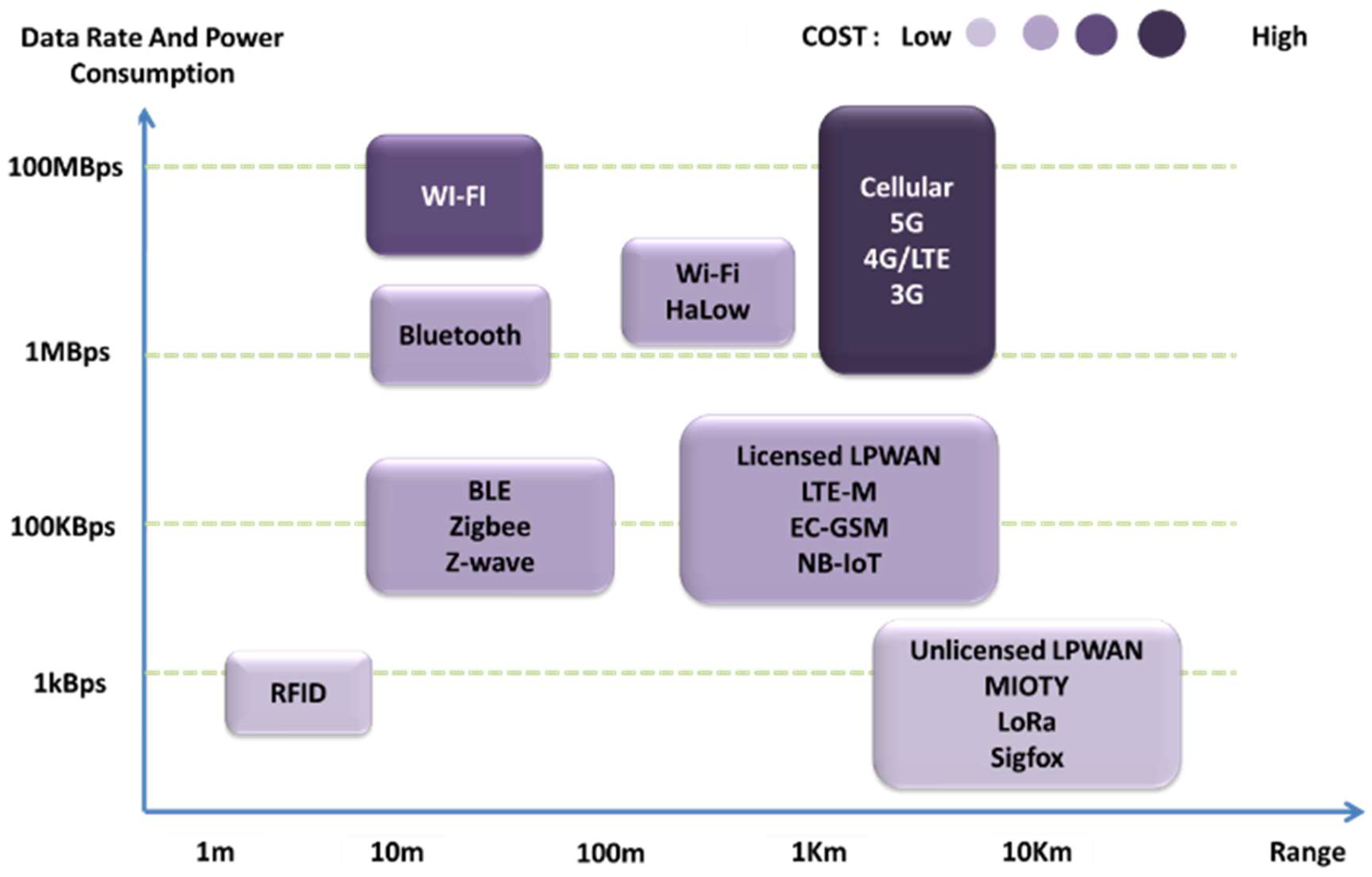
- The advancement of Internet of Things (IoT) technology presents an opportunity to revolutionize urban transportation and parking management.
- The potential for machine learning and transfer learning techniques to adapt and optimize autonomous parking systems across different smart city environments is a compelling avenue for exploration.
1.3. Significance of Our Study
1.4. Research Objectives
- Develop a robust module for an IoT-based autonomous parking system, dedicated to real-time data collection, analysis, and decision making. By leveraging advanced sensors and analytics, it will enable an automated detection of vacant and occupied parking spaces, improving the user experience and reducing the time spent searching for parking.
- Explore and apply transfer learning techniques to adapt the autonomous parking system to different smart city environments, promoting scalability and ease of deployment.
- Conduct extensive testing and evaluation of the developed system in real-world smart city environments to assess its effectiveness in optimizing parking space utilization and reducing traffic congestion.
2. Literature Review
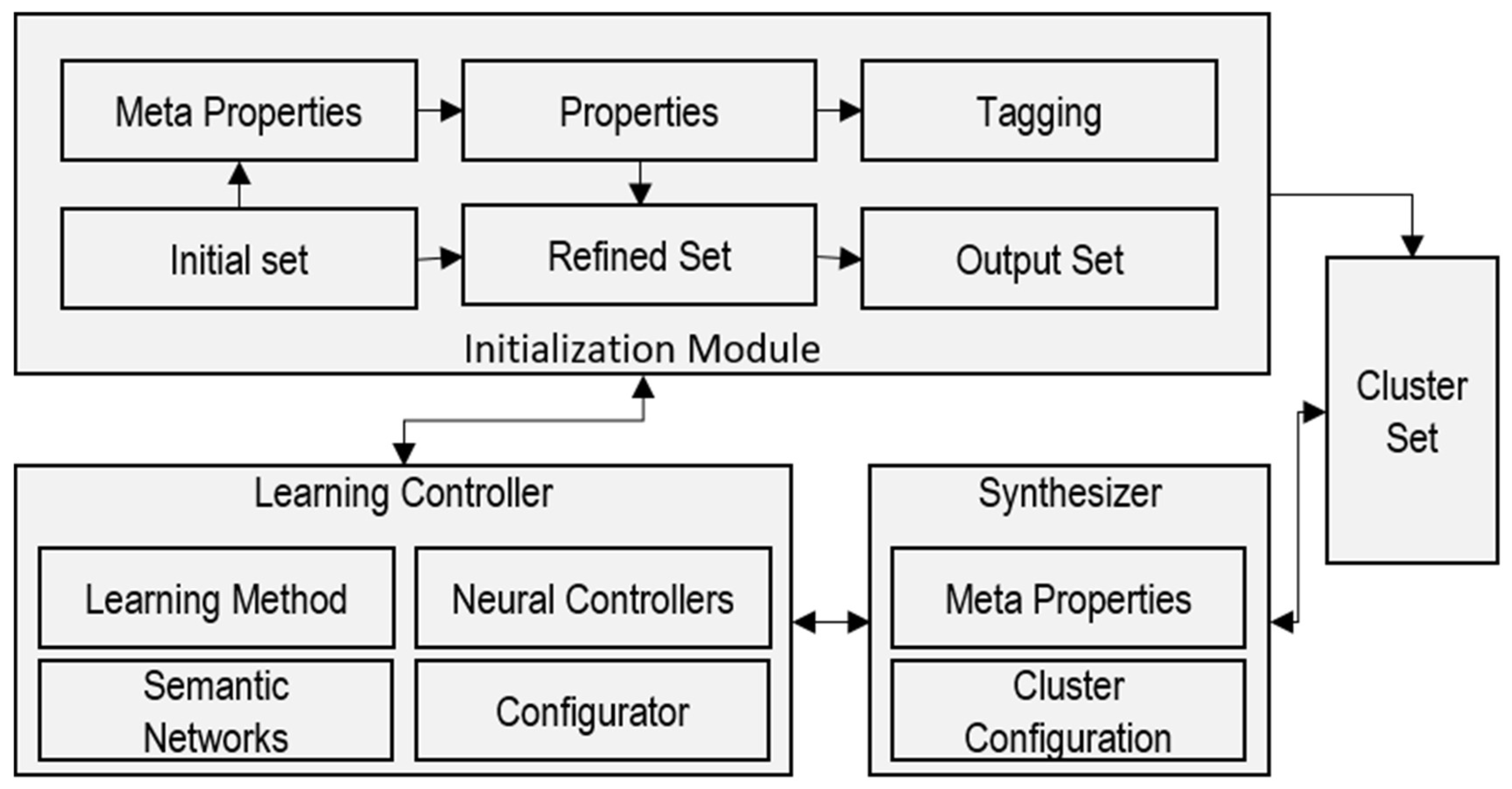
3. Solution Design and Implementation
Conceptual Description of the Solution
4. Performance Evaluation of the System
4.1. Phase-I Using SCOPE with AlexNet
4.2. Phase-II Using SCOPE with YOLO
- Detect multiple objects in an image.
- Predict multiple classes.
- Identify the locations of objects in the image.
- True positive = 7991; the model accurately classified 7991 images in the empty lot class out of 8000 images.
- True negative = 7988; the model accurately classified 7988 images in the empty lot class out of 8000 images.
- False positive = 12; consequently, the model mistakenly identified 12 images of the occupied lot class as the empty lot class.
- False negative = 9; consequently, the model mistakenly identified 9 images of the empty lot class as the occupied lot class.
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fang, Y.; Min, H.; Wu, X.; Wang, W.; Zhao, X.; Mao, G. On-Ramp Merging Strategies of Connected and Automated Vehicles Considering Communication Delay. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15298–15312. [Google Scholar] [CrossRef]
- Belissent, J. Getting clever about smart cities: New opportunities require new business models. Camb. Mass. 2010, 193, 244–277. [Google Scholar]
- Draz, U.; Ali, T.; Khan, J.A.; Majid, M.; Yasin, S. Areal-time smart dumpsters monitoring and garbage collection system. In Proceedings of the 2017 Fifth International Conference on Aerospace Science & Engineering (ICASE), Islamabad, Pakistan, 14–16 November 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Yue, W.; Li, C.; Wang, S.; Xue, N.; Wu, J. Cooperative Incident Management in Mixed Traffic of CAVs and Human-Driven Vehicles. IEEE Trans. Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]
- Safi, Q.G.K.; Luo, S.; Pan, L.; Liu, W.; Hussain, R.; Bouk, S.H. SVPS: Cloud-based smart vehicle parking system over ubiquitous VANETs. Comput. Netw. 2018, 138, 18–30. [Google Scholar] [CrossRef]
- Paidi, V.; Fleyeh, H.; Håkansson, J.; Nyberg, R.G. Smart parking sensors, technologies and applications for open parking lots: A review. IET Intell. Transp. Syst. 2018, 12, 735–741. [Google Scholar] [CrossRef]
- Cai, B.Y.; Alvarez, R.; Sit, M.; Duarte, F.; Ratti, C. Deep Learning-Based Video System for Accurate and Real-Time Parking Measurement. IEEE Internet Things J. 2019, 6, 7693–7701. [Google Scholar] [CrossRef]
- Vu, H.T.; Huang, C.-C. Parking space status inference upon a deep CNN and multi-task contrastive network with spatial transform. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 1194–1208. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, J.; Li, X.; Xiong, L. Vision-based parking-slot detection: A DCNN-based approach and a large-scale benchmark dataset. IEEE Trans. Image Process. 2018, 27, 5350–5364. [Google Scholar] [CrossRef]
- Chen, J.; Wang, Q.; Cheng, H.H.; Peng, W.; Xu, W. A Review of Vision-Based Traffic Semantic Understanding in ITSs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19954–19979. [Google Scholar] [CrossRef]
- Tekouabou, S.C.K.; Cherif, W.; Silkan, H. Improving parking availability prediction in smart cities with IoT and ensemble-based model. J. King Saud Univ. Comput. Inf. Sci. 2020, 34, 687–697. [Google Scholar]
- Luo, J.; Wang, G.; Li, G.; Pesce, G. Transport infrastructure connectivity and conflict resolution: A machine learning analysis. Neural Comput. Appl. 2022, 34, 6585–6601. [Google Scholar] [CrossRef]
- Orrie, O.; Silva, B.; Hancke, G.P. A Wireless Smart Parking System. In Proceedings of the 41st Annual Conference of the IEEE Industrial Electronics Society (IECON), Yokohama, Japan, 9–12 November 2015. [Google Scholar]
- Karthi, M.; Preethi, H. Smart Parking with Reservation in Cloud based environment. In Proceedings of the 2016 IEEE International Conference on Cloud Computing in Emerging Markets, Bangalore, India, 19–21 October 2016; pp. 164–167. [Google Scholar]
- Tabassum, N.; Namoun, A.; Alyas, T.; Tufail, A.; Taqi, M.; Kim, K.-H. Classification of Bugs in Cloud Computing Applications Using Machine Learning Techniques. Appl. Sci. 2023, 13, 2880. [Google Scholar] [CrossRef]
- Xu, J.; Guo, K.; Zhang, X.; Sun, P.Z.H. Left Gaze Bias between LHT and RHT: A Recommendation Strategy to Mitigate Human Errors in Left- and Right-Hand Driving. IEEE Trans. Intell. Veh. 2023. [Google Scholar] [CrossRef]
- Arora, D.; Garg, M.; Gupta, M. Diving deep in Deep Convolutional Neural Network. In Proceedings of the 2020 2nd International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), Greater Noida, India, 18–19 December 2020; pp. 749–751. [Google Scholar]
- Ojagh, S.; Cauteruccio, F.; Terracina, G.; Liang, S.H. Enhanced air quality prediction by edge-based spatiotemporal data preprocessing. Comput. Electr. Eng. 2021, 96 Pt B, 107572. [Google Scholar] [CrossRef]
- Chen, J.; Xu, M.; Xu, W.; Li, D.; Peng, W.; Xu, H. A Flow Feedback Traffic Prediction Based on Visual Quantified Features. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10067–10075. [Google Scholar] [CrossRef]
- Xu, J.; Guo, K.; Sun, P.Z.H. Driving Performance Under Violations of Traffic Rules: Novice Vs. Experienced Drivers. IEEE Trans. Intell. Veh. 2022, 7, 908–917. [Google Scholar] [CrossRef]
- Assim, M.; Al-Omary, A. A survey of IoT-based smart parking systems in smart cities. In Proceedings of the 3rd Smart Cities Symposium (SCS 2020), Online Conference, 21–23 September 2020; pp. 35–38. [Google Scholar] [CrossRef]
- Takehara, R.; Gonsalves, T. Autonomous Car Parking System using Deep Reinforcement Learning. In Proceedings of the 2021 2nd International Conference on Innovative and Creative Information Technology (ICITech), Salatiga, Indonesia, 23–25 September 2021; pp. 85–89. [Google Scholar] [CrossRef]
- Sajna, S.; Nair, R.R. Learning-Based Smart Parking System. In Proceedings of the International Conference on Computational Intelligence. Algorithms for Intelligent Systems; Tiwari, R., Pavone, M.F., Ravindranathan Nair, R., Eds.; Springer: Singapore, 2023. [Google Scholar] [CrossRef]
- Iqbal, K.; Abbas, S.; Khan, M.A.; Ather, A.; Khan, M.S.; Fatima, A.; Ahmad, G. Autonomous Parking-Lots Detection with Multi-Sensor Data Fusion Using Machine Deep Learning Techniques. CMC-Comput. Mater. Contin. 2021, 66, 1595–1612. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, X.; Zhang, W.; Yao, G.; Li, D.; Zeng, L. Autonomous Parking Space Detection for Electric Vehicles Based on Improved YOLOV5-OBB Algorithm. World Electr. Veh. J. 2023, 14, 276. [Google Scholar] [CrossRef]
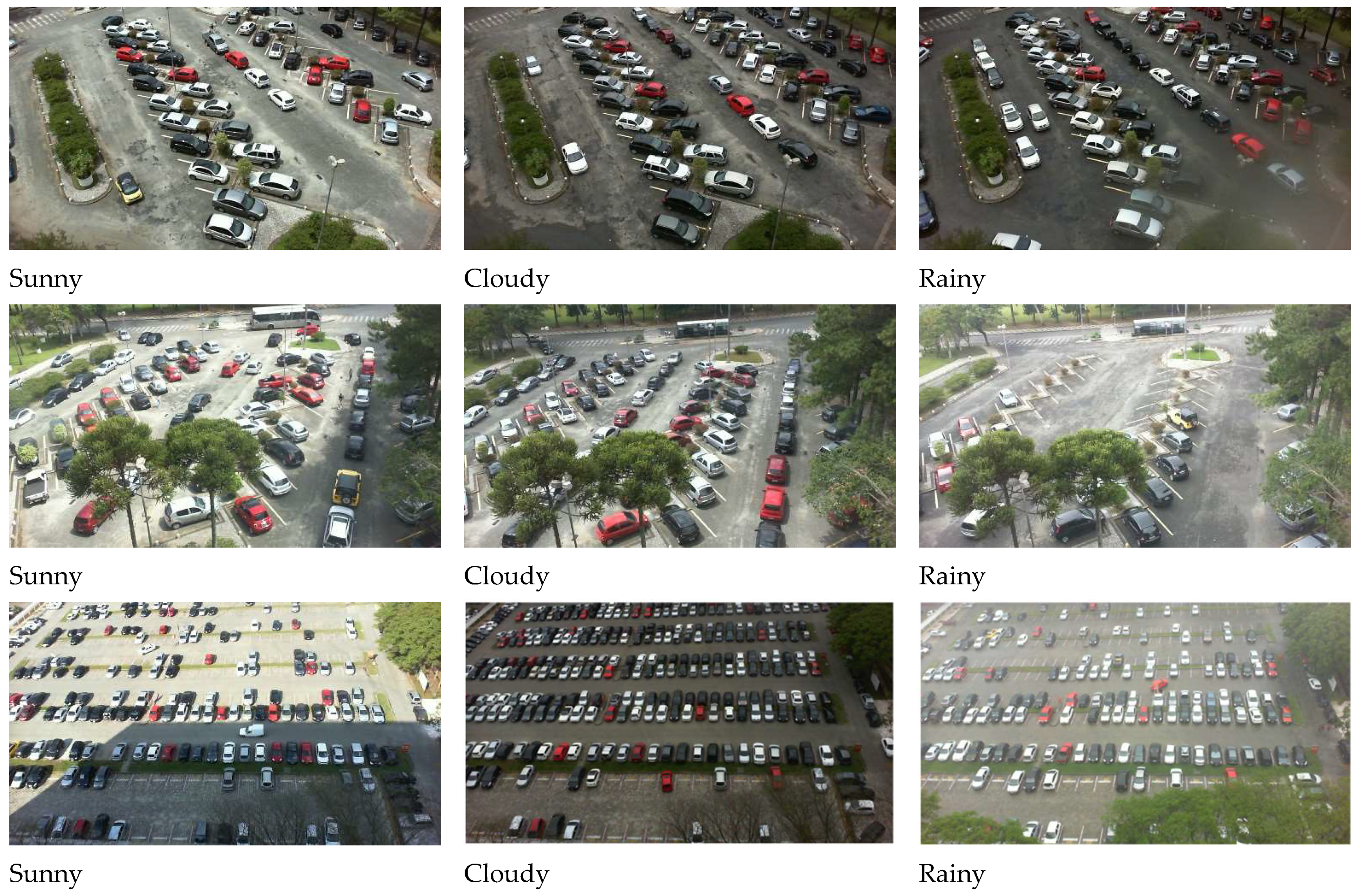
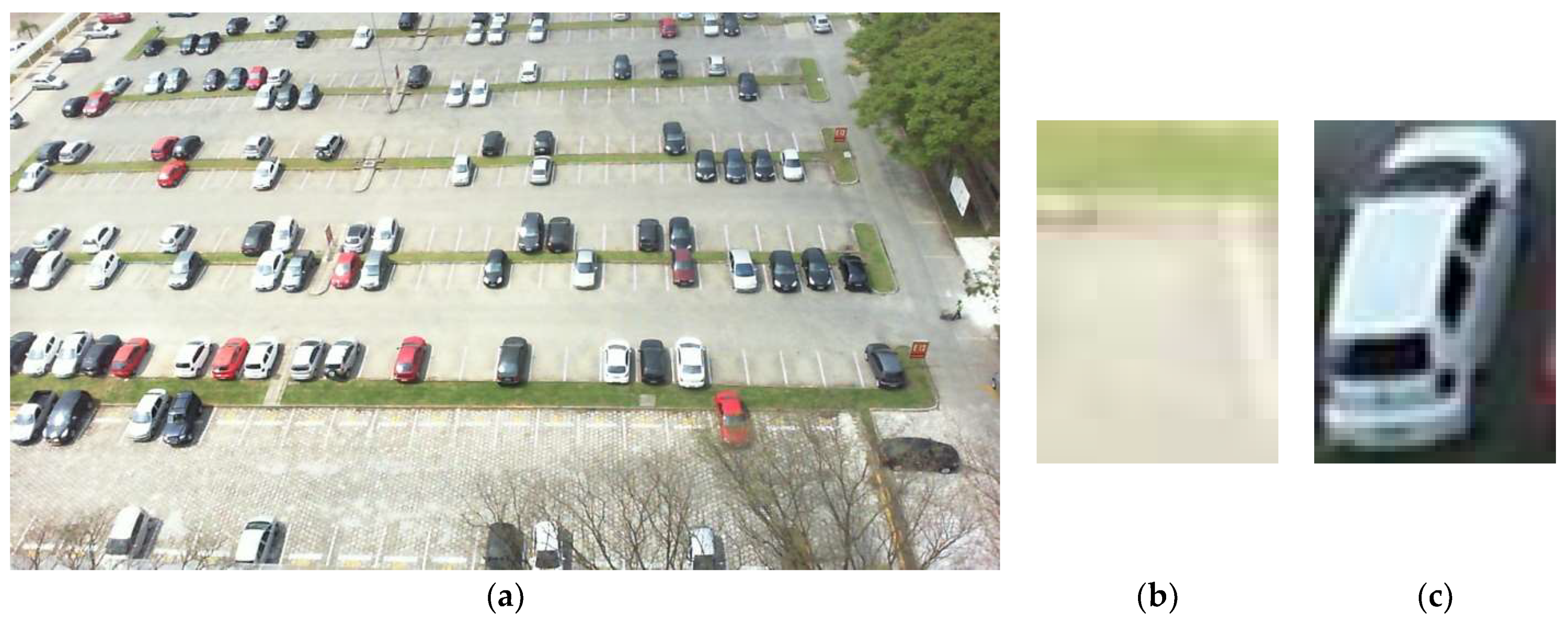
- Almeida, P.; Oliveira, L.S.; Silva, E., Jr.; Britto, A., Jr.; Koerich, A. PKLot—A robust dataset for parking lot classification. Expert Syst. Appl. 2015, 42, 4937–4949. Available online: https://www.kaggle.com/datasets/ammarnassanalhajali/pklot-dataset (accessed on 1 October 2023). [CrossRef]
- Ma, X.; Dong, Z.; Quan, W.; Dong, Y.; Tan, Y. Real-time assessment of asphalt pavement moduli and traffic loads using monitoring data from Built-in Sensors: Optimal sensor placement and identification algorithm. Mech. Syst. Signal Process. 2023, 187, 109930. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, S.; Shen, Y.; Yuan, X.; Lu, Z. Hierarchical Velocity Optimization for Connected Automated Vehicles With Cellular Vehicle-to-Everything Communication at Continuous Signalized Intersections. IEEE Trans. Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]




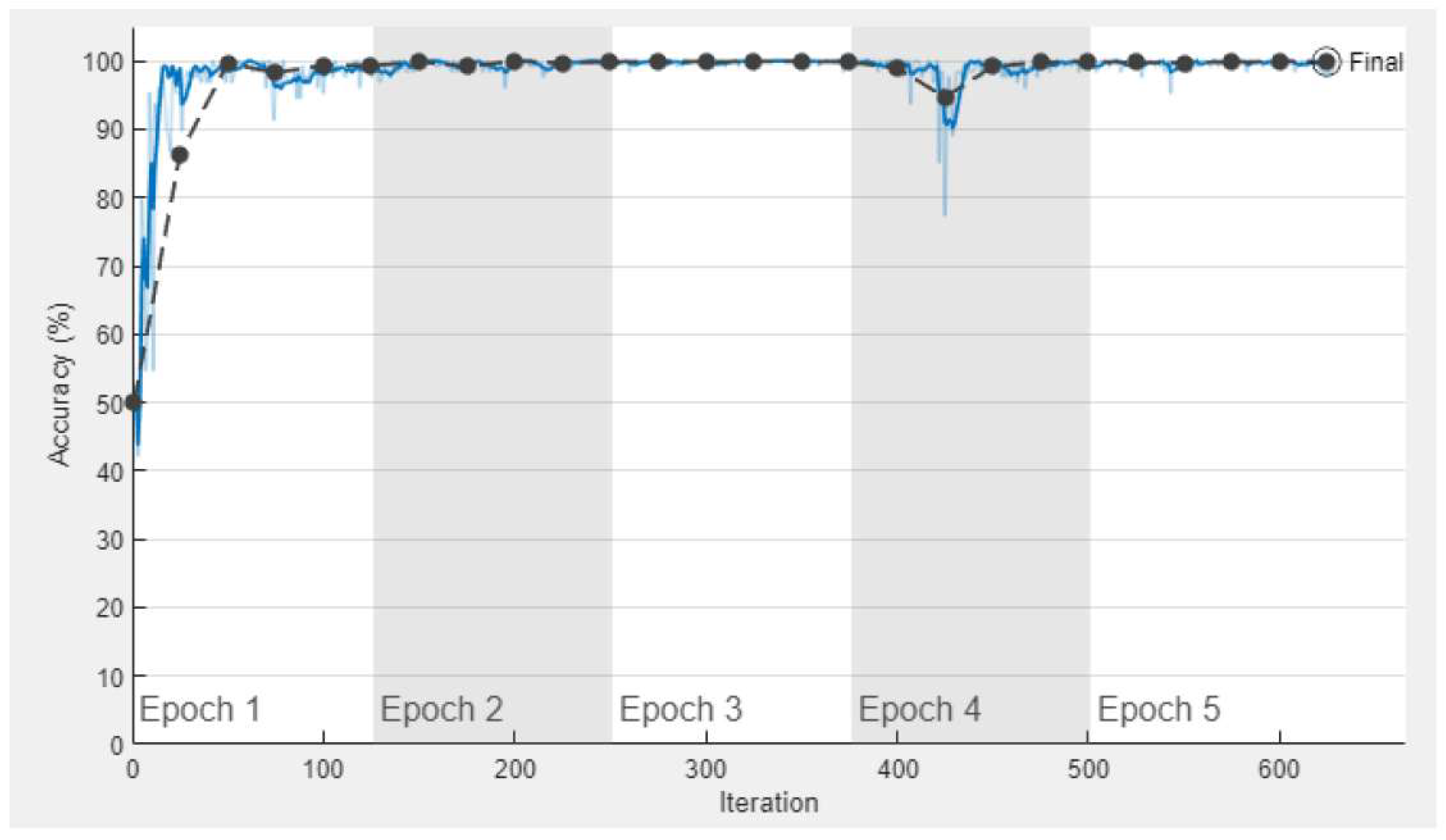
 ) represents training accuracy and its smooth training accuracy curve is shown using the dark blue curve (
) represents training accuracy and its smooth training accuracy curve is shown using the dark blue curve ( ). Further, the black curve (
). Further, the black curve ( ) represents the training validation of the proposed model.
) represents training accuracy and its smooth training accuracy curve is shown using the dark blue curve (). Further, the black curve () represents the training validation of the proposed model.
) represents the training validation of the proposed model.
) represents training accuracy and its smooth training accuracy curve is shown using the dark blue curve (). Further, the black curve () represents the training validation of the proposed model.
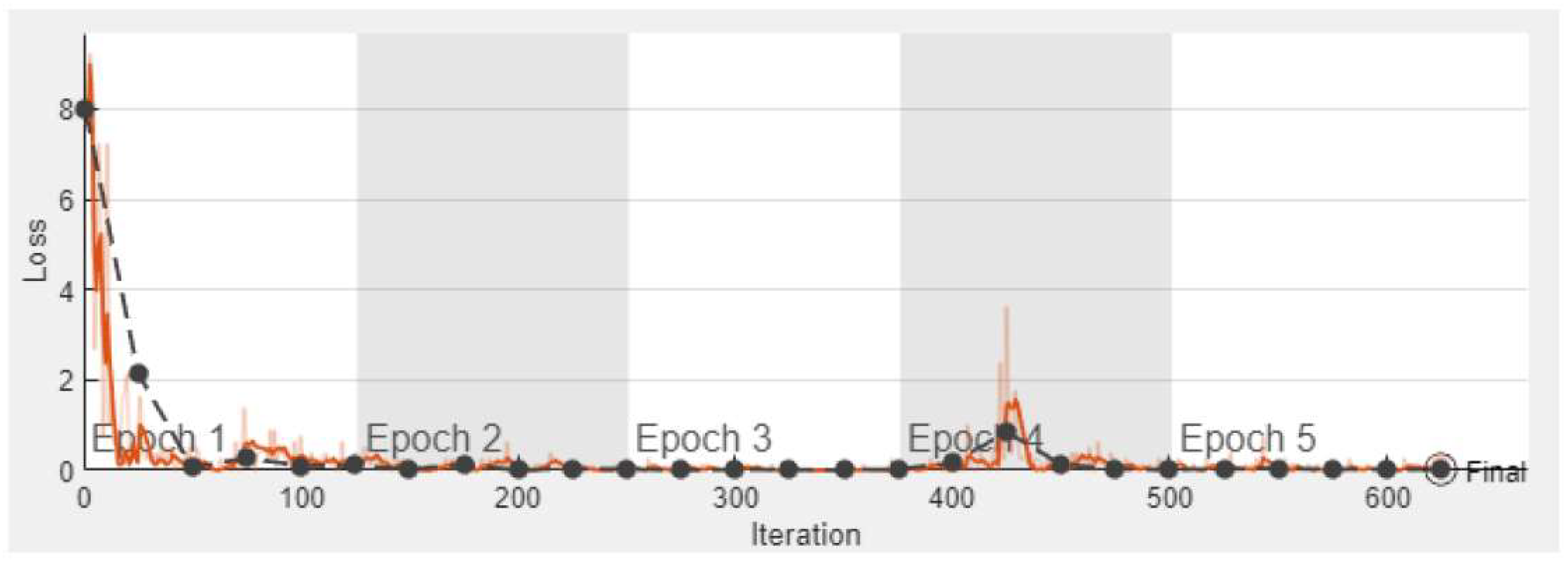
 ) represents the number of losses and its smooth loss curve is shown using the dark orange line (
) represents the number of losses and its smooth loss curve is shown using the dark orange line ( ). Lastly, the black curve (
). Lastly, the black curve ( ) represents the loss validation of the proposed model.
) represents the number of losses and its smooth loss curve is shown using the dark orange line (). Lastly, the black curve () represents the loss validation of the proposed model.
) represents the loss validation of the proposed model.
) represents the number of losses and its smooth loss curve is shown using the dark orange line (). Lastly, the black curve () represents the loss validation of the proposed model.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper Title | Year | Research Focus | Key Finding |
|---|---|---|---|
| A survey of IoT-based smart parking systems in smart cities [21]. | 2019 | IoT-based smart parking systems. | Provides a comprehensive overview of IoT-based parking systems, their components, and challenges. |
| Deep reinforcement learning for autonomous parking [22]. | 2020 | Autonomous parking with deep reinforcement learning. | Discusses a deep reinforcement learning approach for autonomous parking. |
| Learning-based smart parking system [23]. | 2021 | Intelligent detection of free parking slots. | Discusses convolution neural networks. |
| Autonomous detection of parking lots with multi-sensor data fusion using machine deep learning techniques [24]. | 2021 | Deep convolutional neural network F-MTCNN. | Provides vision-based target detection and object classification. |
| Autonomous parking space detection for electric vehicles based on the improved YOLOV5-OBB algorithm [25]. | 2023 | Receptive field block. | Discusses parking space detection and coordinate attention mechanism. |
| Expected Output (Ee, Eo) | Oe (Empty) | Oo (Occupied) | Total | |
|---|---|---|---|---|
| Input | Ee (Empty) | 7991 | 9 | 8000 |
| Eo (Occupied) | 12 | 7988 | 8000 | |
| Total | 8003 | 7997 | 16,000 |
| Expected Output (Ee, Eo) | Oe (Empty) | Oo (Occupied) | Total | |
|---|---|---|---|---|
| Input | Ee (Empty) | 1997 | 3 | 2000 |
| Eo (Occupied) | 4 | 1996 | 2000 | |
| Total | 2001 | 1999 | 4000 |
| Expected Output (Ee, Eo) | Oe (Empty) | Oo (Occupied) | Total | |
|---|---|---|---|---|
| Input | Ee (Empty) | 76,173 | 863 | 77,036 |
| Eo (Occupied) | 2027 | 68,022 | 70,049 | |
| Total | 78,200 | 68,885 | 147,085 |
| Results | Accuracy | FNR Miss Rate | TPR Sensitivity | TNR Specificity | PPV Precision | NPV | FPR | FDR | F1-Score |
|---|---|---|---|---|---|---|---|---|---|
| Training | 0.9987 (99.87%) | 0.0013 (0.13%) | 0.9989 (99.89%) | 0.9985 (99.85%) | 0.9985 (99.85%) | 0.9989 (99.89%) | 0.0015 (0.15%) | 0.0015 (0.15%) | 0.9986 (99.87%) |
| Validation | 0.9973 (99.73%) | 0.0028 (0.28%) | 0.9970 (99.70%) | 0.9975 (99.75%) | 0.9975 (99.75%) | 0.9970 (99.70%) | 0.00250 (0.25%) | 0.00250 (0.25%) | 0.9972 (99.73%) |
| Results | Accuracy | FNR Miss Rate | TPR Sensitivity | TNR Specificity | PPV Precision | NPV | FPR | FDR | F1-Score |
|---|---|---|---|---|---|---|---|---|---|
| Validation | 0.9804 (98.04%) | 0.0196 (1.96%) | 0.9888 98.88%) | 0.9711 (97.11%) | 0.9741 (97.41%) | 0.9875 (98.75%) | 0.02894 (2.89%) | 0.02592 (2.59%) | 0.9814 (98.14%) |
| Literature | Training | Validation | ||
|---|---|---|---|---|
| Accuracy (%) | Miss Rate (%) | Accuracy (%) | Miss Rate (%) | |
| Fabian (2013) [22] | 96.40 | 3.60 | 96.2 | 3.80 |
| Amato et al. (2018) [23] | 96.36 | 3.64 | 96.1 | 3.90 |
| Kashif et al. (2020) [24] | 97.60 | 2.40 | 96.6 | 3.40 |
| Proposed model (YOLO) | 99.89 | 0.11 | 98.04 | 1.96 |
| Proposed model (AlexNet) | 99.87 | 0.13 | 99.73 | 0.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbas, Q.; Ahmad, G.; Alyas, T.; Alghamdi, T.; Alsaawy, Y.; Alzahrani, A. Revolutionizing Urban Mobility: IoT-Enhanced Autonomous Parking Solutions with Transfer Learning for Smart Cities. Sensors 2023, 23, 8753. https://doi.org/10.3390/s23218753
Abbas Q, Ahmad G, Alyas T, Alghamdi T, Alsaawy Y, Alzahrani A. Revolutionizing Urban Mobility: IoT-Enhanced Autonomous Parking Solutions with Transfer Learning for Smart Cities. Sensors. 2023; 23(21):8753. https://doi.org/10.3390/s23218753
Chicago/Turabian StyleAbbas, Qaiser, Gulzar Ahmad, Tahir Alyas, Turki Alghamdi, Yazed Alsaawy, and Ali Alzahrani. 2023. "Revolutionizing Urban Mobility: IoT-Enhanced Autonomous Parking Solutions with Transfer Learning for Smart Cities" Sensors 23, no. 21: 8753. https://doi.org/10.3390/s23218753