
LPI Radar Detection Based on Deep Learning Approach with Periodic Autocorrelation Function

Abstract
:1. Introduction
2. Research Background
2.1. LPI Radar Signal
2.2. Signal Detection
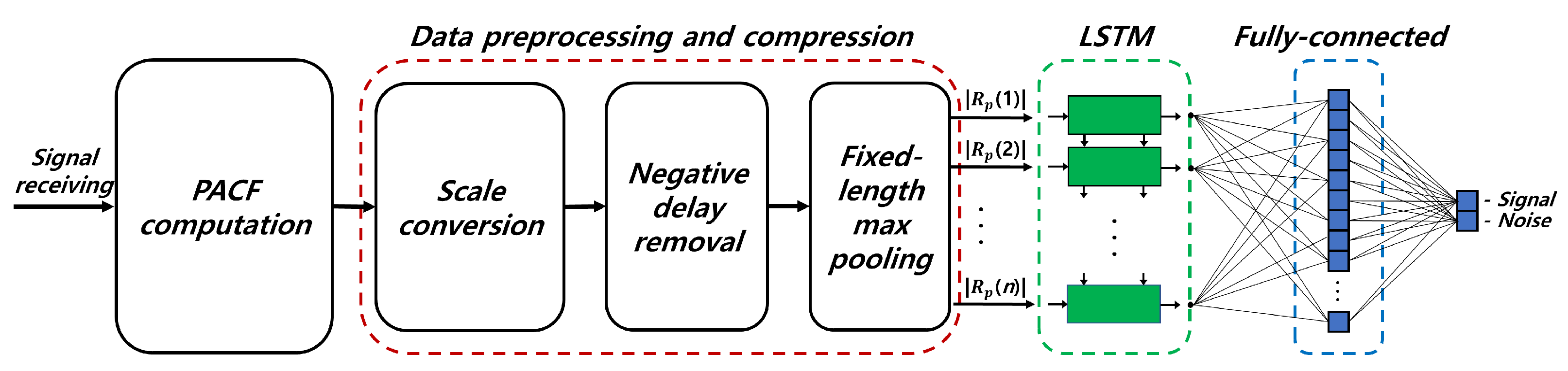
3. Proposed Signal Detection Method
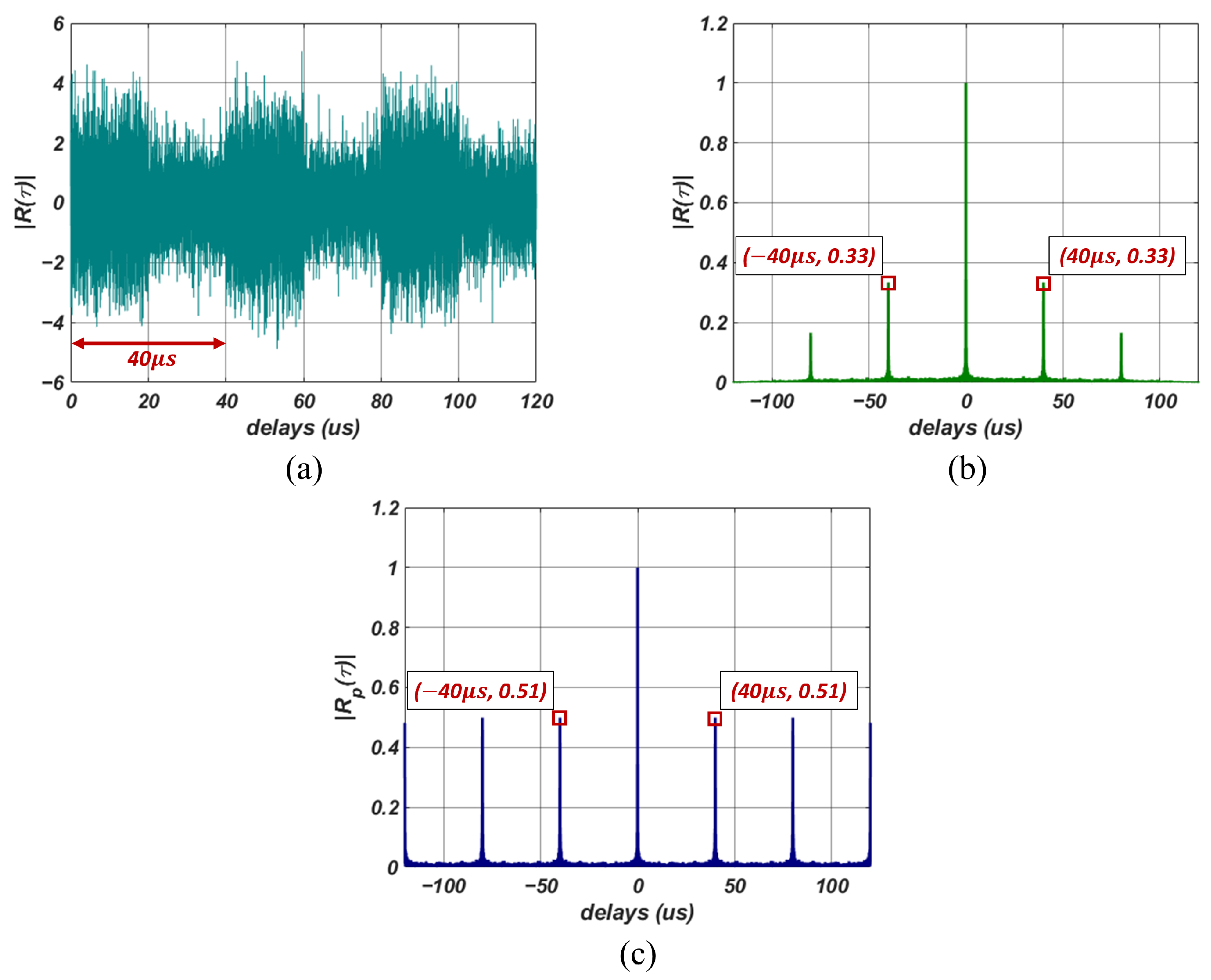
3.1. Periodicity Analysis
3.1.1. Autocorrelation Function
3.1.2. Periodic Autocorrelation Function
3.2. Data Preprocessing and Compression
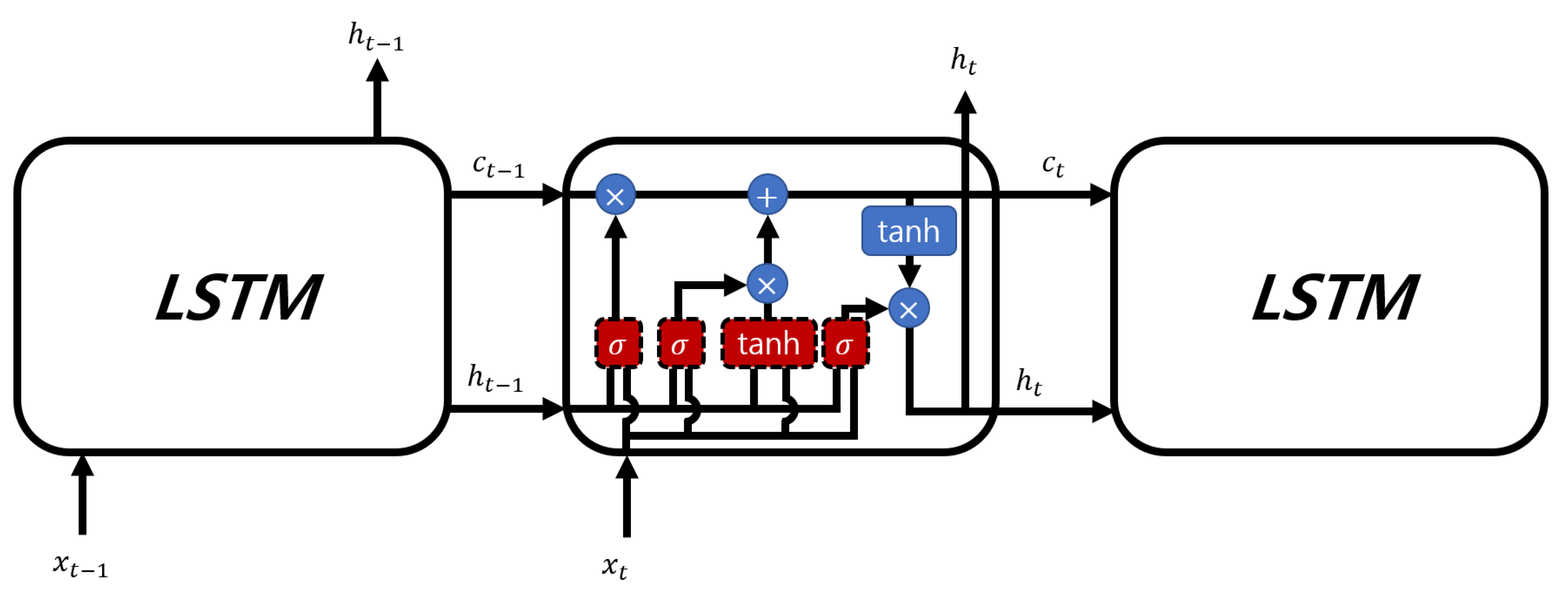
3.3. Signal Detection Neural Network
3.3.1. Long Short-Term Memory
3.3.2. Fully-Connected Network
4. Detection Performance Analysis
4.1. Model Training
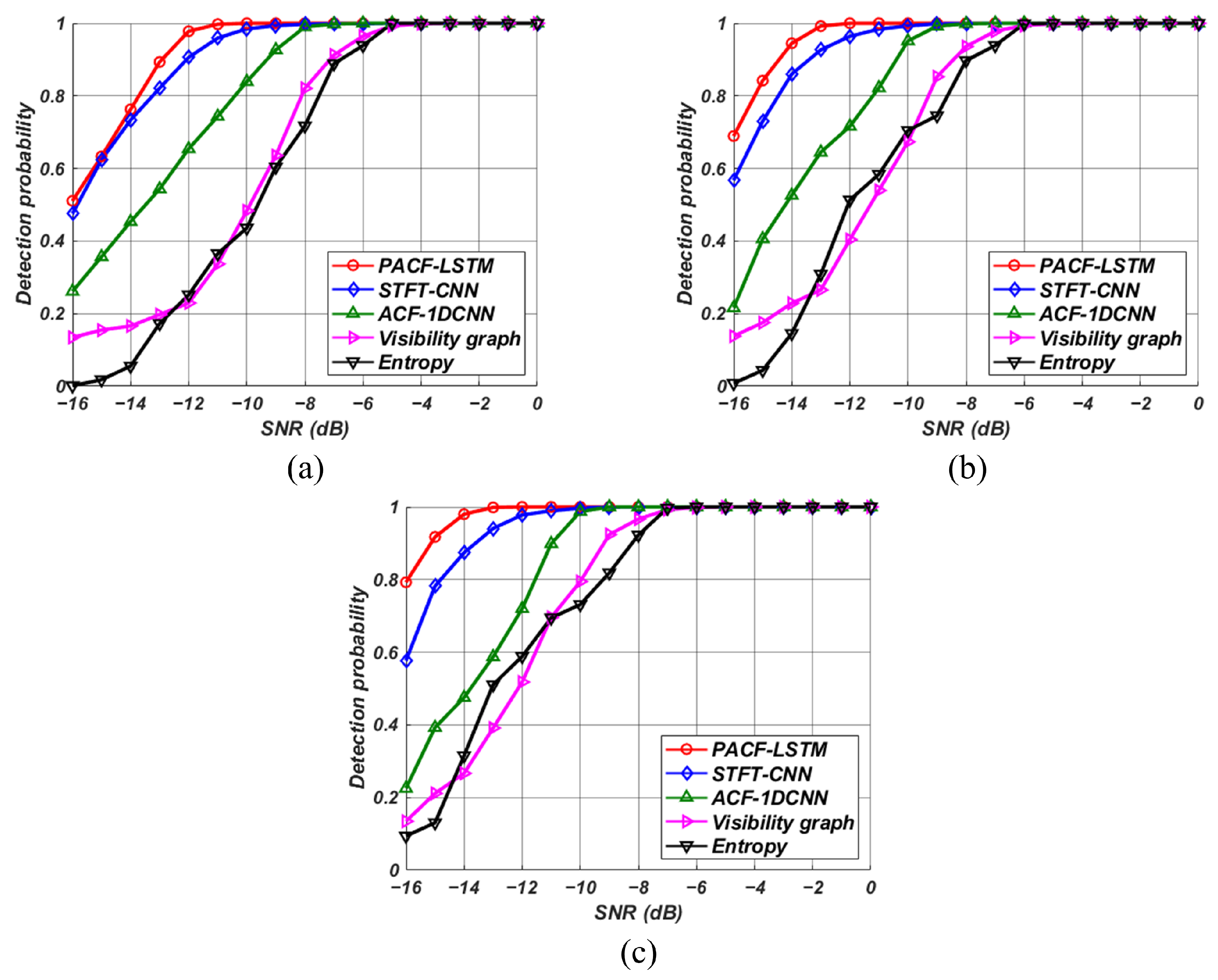
4.2. Simulation Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wiley, R.G. ELINT: The Interception and Analysis of Radar Signals; Artech House: London, UK, 2006. [Google Scholar]
- Pace, P.E. Detecting and Classifying Low Probability of Intercept Radar; Artech House: London, UK, 2009. [Google Scholar]
- Urkowitz, H. Energy detection of unknown deterministic signals. Proc. IEEE 1967, 55, 523–531. [Google Scholar] [CrossRef]
- Chen, X.; Nagaraj, S. Entropy based spectrum sensing in cognitive radio. In Proceedings of the 2008 Wireless Telecommunications Symposium, Pomona, CA, USA, 24–26 April 2008. [Google Scholar]
- Hock, K.M. Narrowband weak signal detection by higher order spectrum. IEEE Trans. Signal Process. 1996, 44, 874–879. [Google Scholar] [CrossRef]
- Wan, T.; Jiang, K.; Tang, Y.; Xiong, Y.; Tang, B. Automatic LPI Radar Signal Sensing Method Using Visibility Graphs. IEEE Access 2020, 8, 159650–159660. [Google Scholar] [CrossRef]
- Nuhoglu, M.A.; Alp, Y.K.; Akyon, F.C. Deep Learning for Radar Signal Detection in Electronic Warfare Systems. In Proceedings of the 2020 IEEE Radar Conference, Florence, Italy, 21–25 September 2020. [Google Scholar]
- Chen, Z.; Xu, Y.-Q.; Wang, H.; Guo, D. Deep STFT-CNN for Spectrum Sensing in Cognitive Radio. IEEE Commun. Lett. 2021, 25, 864–868. [Google Scholar] [CrossRef]
- Chae, K.; Park, J.; Kim, Y. Rethinking Autocorrelation for Deep Spectrum Sensing in Cognitive Radio Networks. IEEE Internet Things J. 2023, 10, 864–868. [Google Scholar] [CrossRef]
- Piper, S.O. Receiver frequency resolution for range resolution in homodyne FMCW radar. In Proceedings of the Conference Proceedings National Telesystems Conference 1993, Atlanta, GA, USA, 16–17 June 1993. [Google Scholar]
- Costas, J.P. A study of a class of detection waveforms having nearly ideal range-Doppler ambiguity properties. Proc. IEEE 1984, 72, 996–1009. [Google Scholar] [CrossRef]
- Ranzato, M.; Huang, F.J.; Boureau, Y.-L.; LeCun, Y. Unsupervised Learning of Invariant Feature Hierarchies with Applications to Object Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007. [Google Scholar]
- Liang, M.; Hu, X. Recurrent convolutional neural network for object recognition. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Sutskever, I.; Martens, J.; Hinton, G.E. Generating text with recurrent neural networks. In Proceedings of the 28th International Conference on Machine Learning, Bellevue, WA, USA, 28 June–2 July 2011. [Google Scholar]
- Mulder, W.D.; Bethard, S.; Moens, M.-F. A survey on the application of recurrent neural networks to statistical language modeling. Comput. Speech Lang. 2015, 30, 61–98. [Google Scholar]
- Sak, H.; Senior, A.; Rao, K.; Beaufays, F. Fast and Accurate Recurrent Neural Network Acoustic Models for Speech Recognition. In Proceedings of the Interspeech 2015, Dresden, Germany, 6–10 September 2015. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; Bengio, Y.; Courville, A. Softmax Units for Multinoulli Output Distributions. In Deep Learning; MIT Press: Cambridge, MA, USA, 2016; pp. 180–184. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2017, arXiv:1412.6980. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulation Scheme | (Hz) | (rad) |
|---|---|---|
| LFM | constant | |
| Costas code | constant | |
| Barker code | constant | 0 or |
| Modulation Scheme | Parameter | Value |
|---|---|---|
| Sampling frequency | 50 MHz | |
| SNR | dB | |
| All | Pulse width | s |
| Duty cycle | ||
| Signal acquisition time | ||
| LFM | Center frequency | MHz |
| Modulation bandwidth | MHz | |
| Fundamental frequency | MHz | |
| Costas code | Number of frequency hops | |
| Frequency spacing | MHz | |
| Center frequency | MHz | |
| Barker code | Barker code length | |
| Cycles per phase code |
| Hyperparameter | Value |
|---|---|
| Initial learn rate | |
| Learning rate reduction | 3% per epoch |
| Epochs | 30 |
| Mini batch size | 64 |
| Input data length | 256 |
| Number of hidden units | 32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, D.-H.; Jeon, M.-W.; Shin, D.-M.; Kim, H.-N. LPI Radar Detection Based on Deep Learning Approach with Periodic Autocorrelation Function. Sensors 2023, 23, 8564. https://doi.org/10.3390/s23208564
Park D-H, Jeon M-W, Shin D-M, Kim H-N. LPI Radar Detection Based on Deep Learning Approach with Periodic Autocorrelation Function. Sensors. 2023; 23(20):8564. https://doi.org/10.3390/s23208564
Chicago/Turabian StylePark, Do-Hyun, Min-Wook Jeon, Da-Min Shin, and Hyoung-Nam Kim. 2023. "LPI Radar Detection Based on Deep Learning Approach with Periodic Autocorrelation Function" Sensors 23, no. 20: 8564. https://doi.org/10.3390/s23208564