
Study on the Design and Performance of a Glove Based on the FBG Array for Hand Posture Sensing

 ,
,
Abstract
:1. Introduction
2. Principle and Packaging
2.1. Materials and Instruments
2.2. Principle of FBG
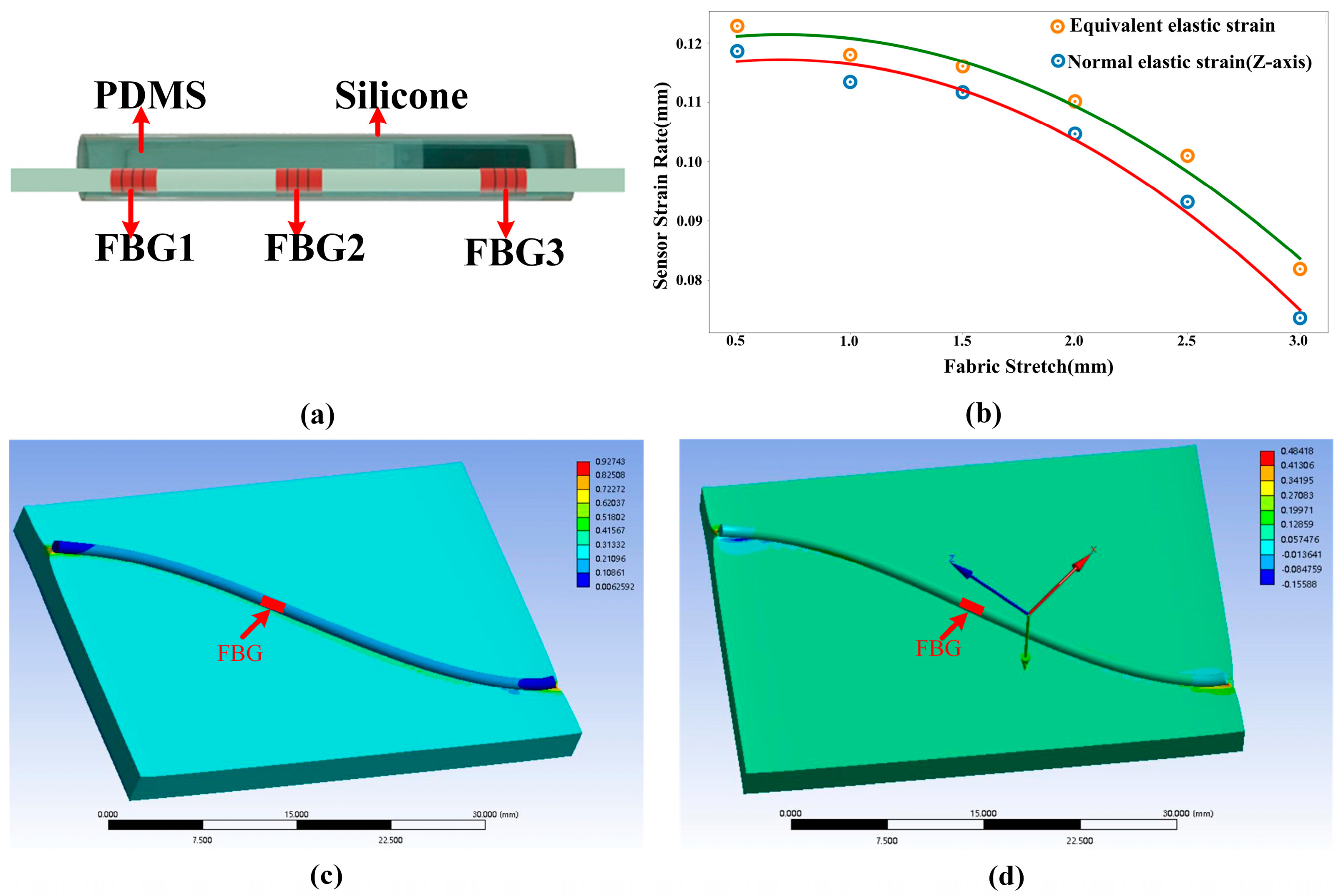
2.3. Simulation and Packaging
3. Results and Discussions
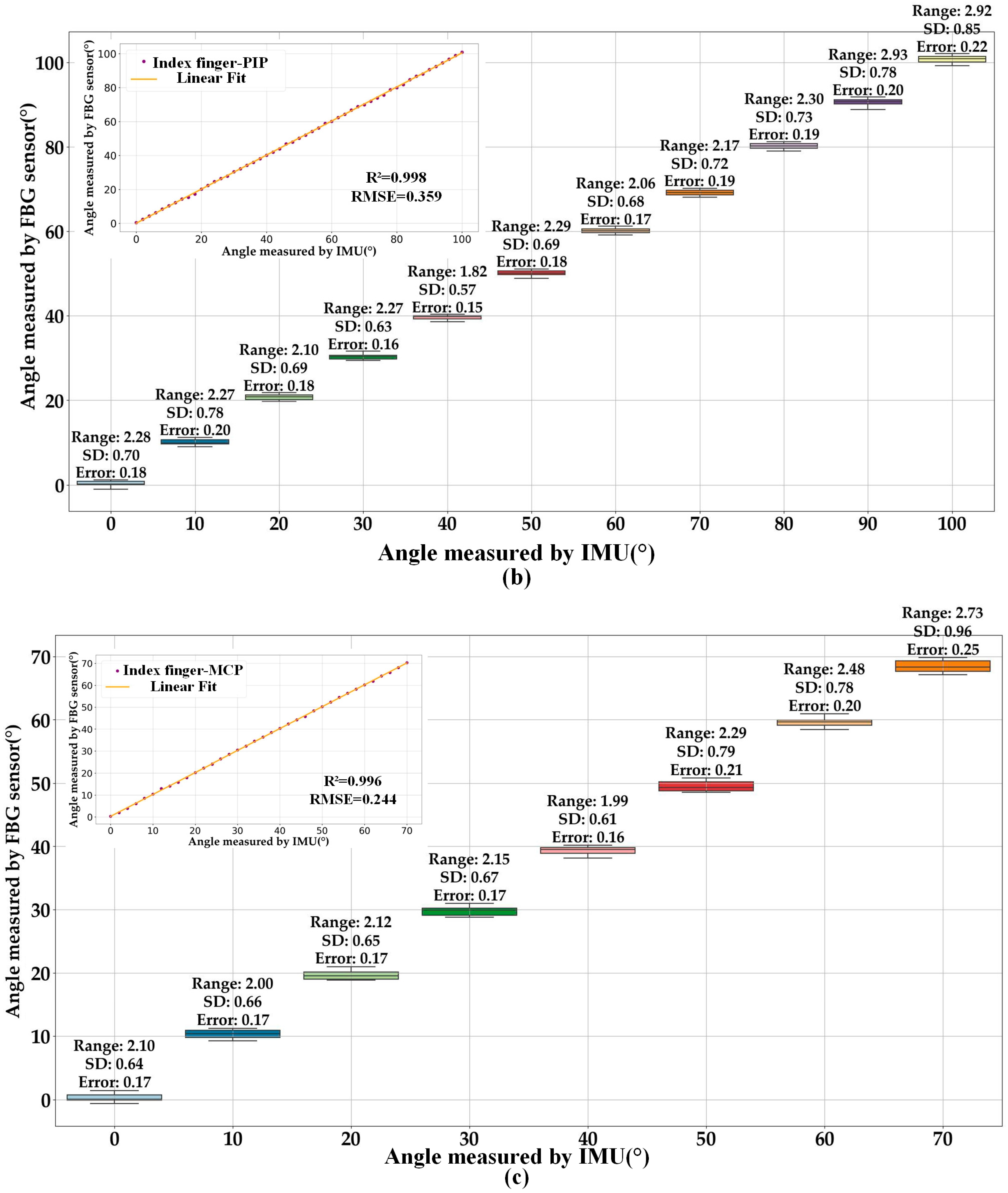
3.1. Measurement Range and Accuracy Test
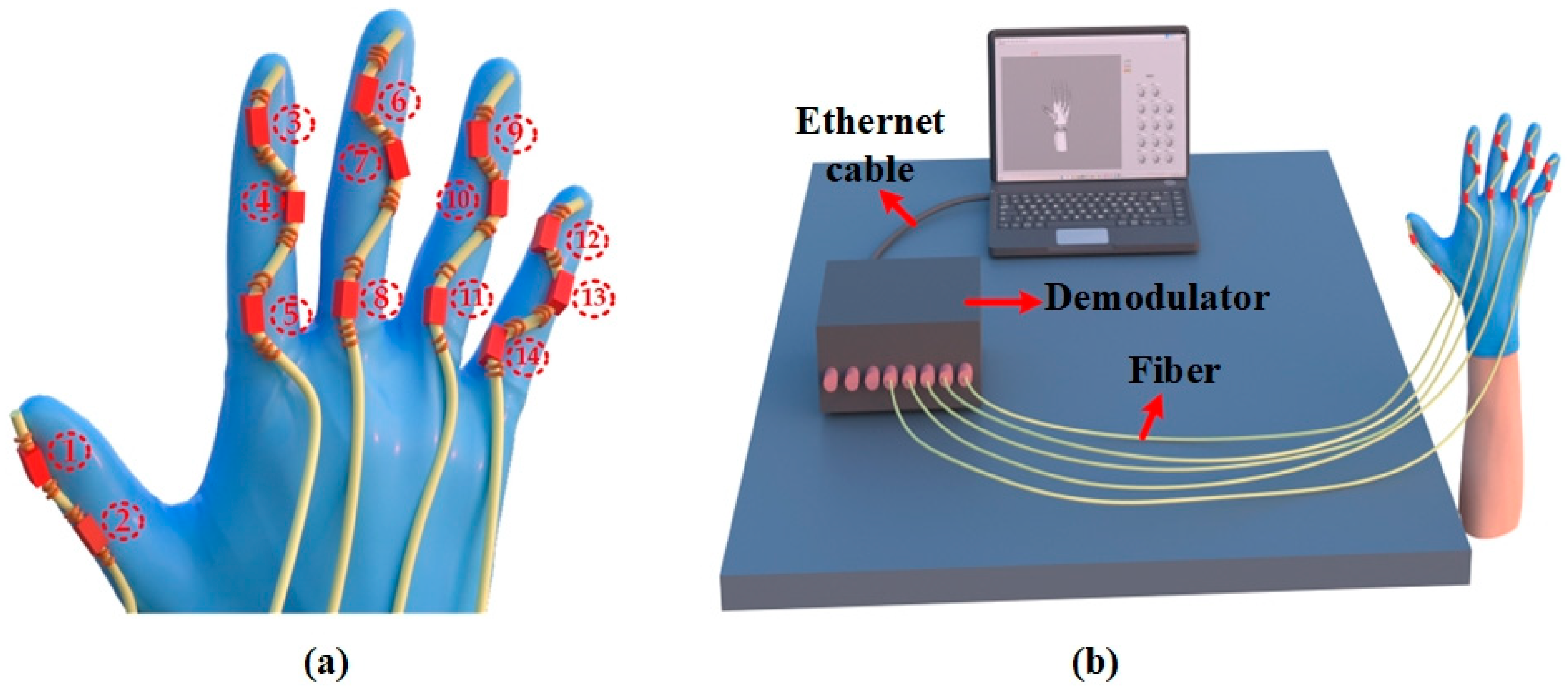
- Mounting the IMU sensor: fasten the IMU sensor onto the hand wearing the FBG sensor, ensuring it is secure and in a steady position.
- Hand calibration: the hand is placed flat on a level table, whereby the Bragg wavelength of each FBG unit is recorded as a distinctive mapping reference at 0°.
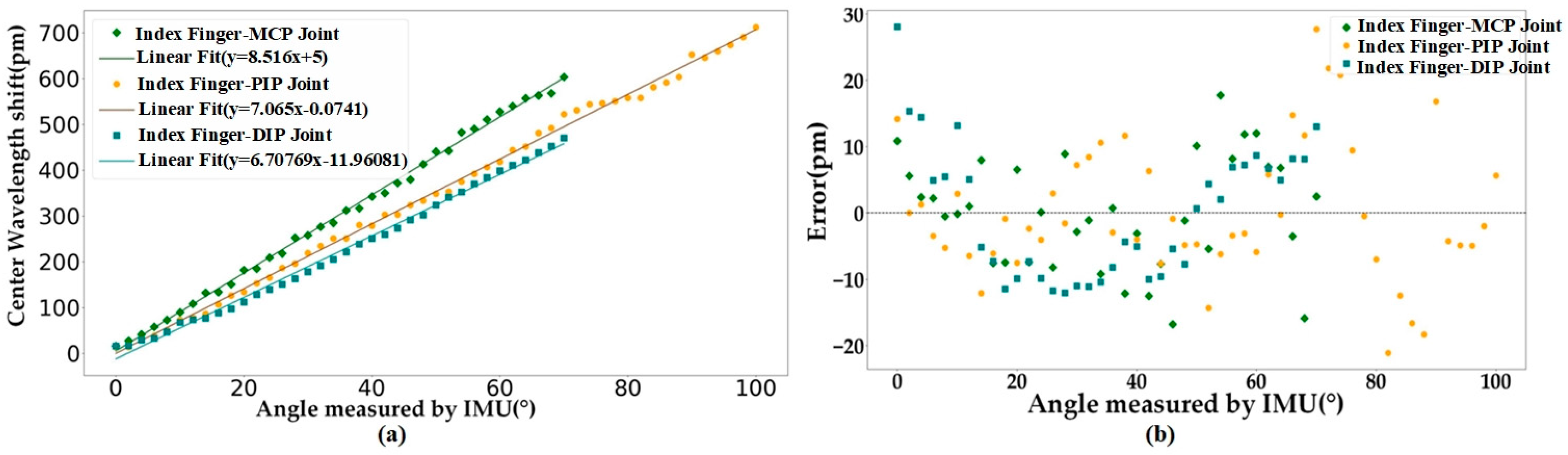
- Bend the finger joints: bend the finger joints at approximately 1°/s and gradually increase the joint angle from 0°.
- Data acquisition: commence data acquisition with the self-made data acquisition software, compare the Bragg wavelength value of each FBG unit acquired in real-time with the mapped value at 0°, and calculate the Bragg wavelength drift value at that point. Real-time angle values are obtained from the regression model and are reconstructed for the hand pose in real-time.
- Real-time angle values are acquired via regression modeling and the real-time reconstruction of the hand posture along with the recognition of the current gesture.
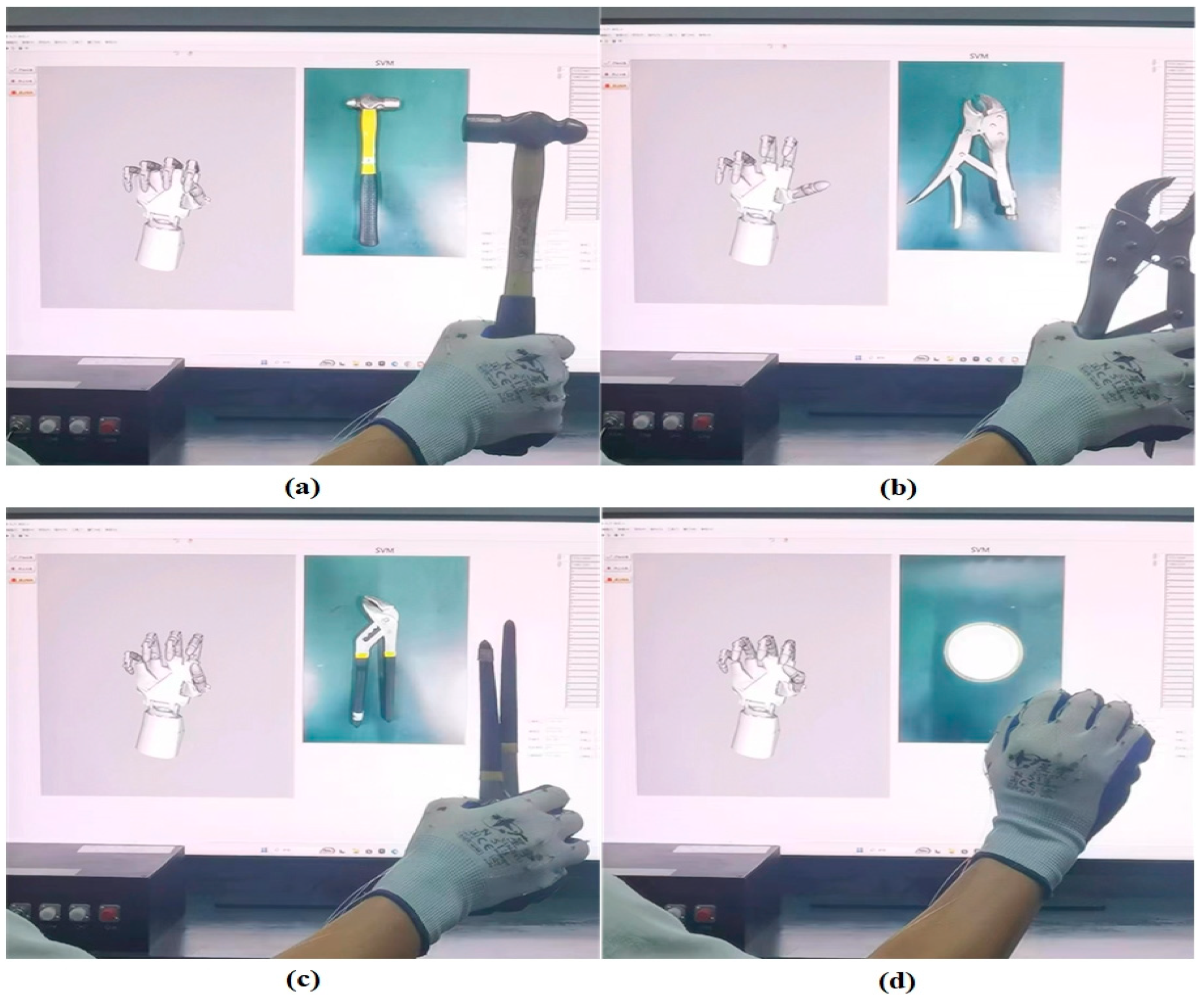
- Using the recorded values of each joint during object grasping as the training set, the angular values of each joint are computed in real-time. These computed values serve as test set inputs, which are then passed to the embedded MATLAB SVM model in LabVIEW for hyperplane delineation. The model predicts the grasped object accurately.
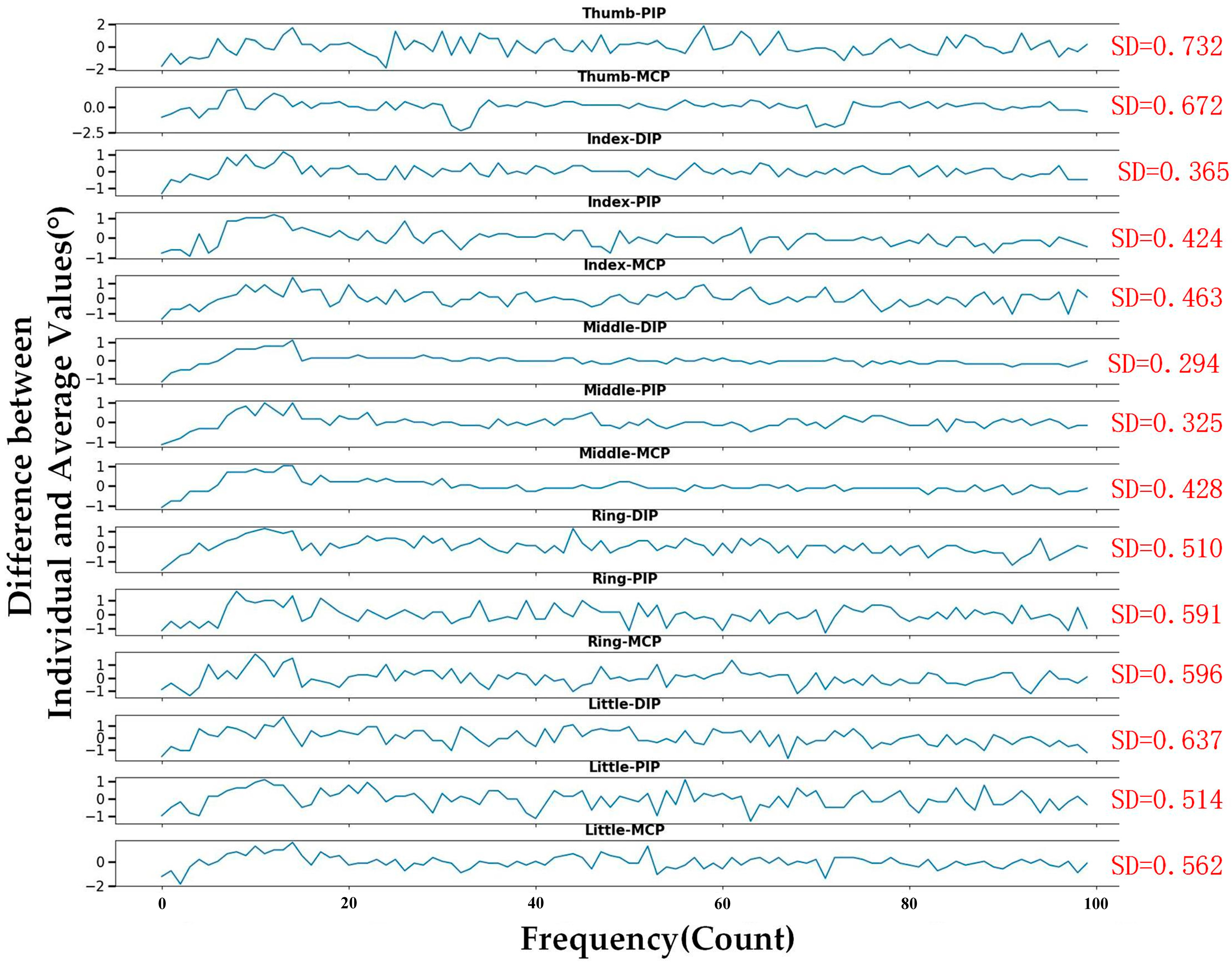
3.2. Repeatability and Consistency Testing
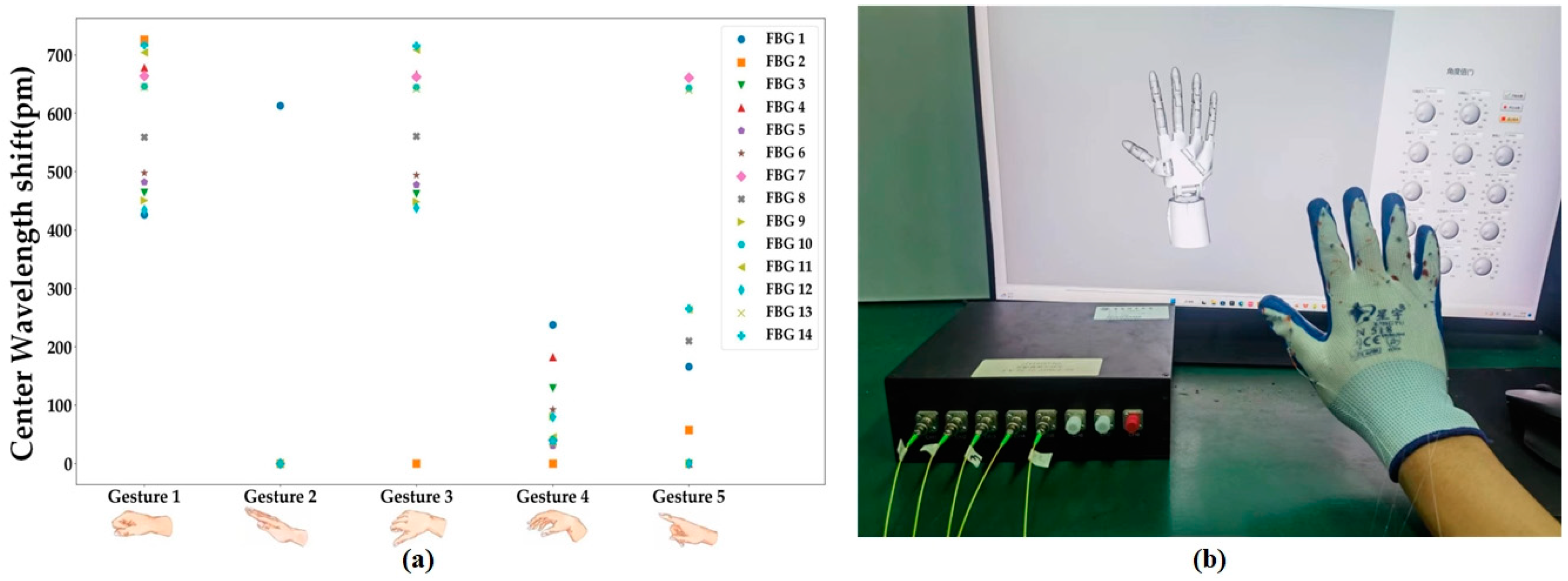
3.3. Gesture Recognition
3.4. Grabbing Object Recognition
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, Z.; Soto, M.A.; Tang, M.; Thévenaz, L. Distributed shape sensing using Brillouin scattering in multi-core fibers. Opt. Express 2016, 24, 25211. [Google Scholar] [CrossRef] [PubMed]
- Bao, W.; Sahoo, N.; Sun, Z.; Wang, C.; Liu, S.; Wang, Y.; Zhang, L. Selective fiber Bragg grating inscription in four-core fiber for two-dimension vector bending sensing. Opt. Express 2020, 28, 26461–26469. [Google Scholar] [CrossRef]
- Jiang, Y.; Reimer, V.; Schossig, T.; Angelmahr, M.; Schade, W. Fiber optical multifunctional human-machine interface for motion capture, temperature, and contact force monitoring. Opt. Lasers Eng. 2020, 128, 106018. [Google Scholar] [CrossRef]
- Jaramillo-Yanez, A.; Benalcazar, M.E.; Mena-Maldinado, E. Real-time hand gesture recognition using surface electromyography and machine learning: A systematic literature review. Sensors 2020, 20, 2467. [Google Scholar] [CrossRef] [PubMed]
- Sarma, D.; Bhuyan, M.K. Methods, databases and recent adva2ncement of vision-based hand gesture recognition for HCI systems: A review. SN Comput. Sci. 2021, 2, 436. [Google Scholar] [CrossRef]
- Guo, L.; Lu, Z.X.; Yao, L.G. Human-machine interaction sensing technology based on hand gesture recognition: A review. IEEE Trans. Hum. Mach. Syst. 2021, 51, 300–309. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, J.; Xiong, L.; Guan, J. Finger motion detection based on optical fiber Bragg grating with polyimide substrate. Sens. Actuators A Phys. 2022, 338, 113482. [Google Scholar] [CrossRef]
- Lun, T.L.T.; Wang, K.; Ho, J.D.-L.; Lee, K.-H.; Sze, K.Y.; Kwok, K.-W. Real-Time Surface Shape Sensing for Soft and Flexible Structures Using Fiber Bragg Gratings. IEEE Robot. Autom. Lett. 2019, 4, 1454–1461. [Google Scholar] [CrossRef]
- Xu, R.; Yurkewich, A.; Patal, R.V. Curvature, Torsion, and Force Sensing in Continuum Robots Using Helically Wrapped FBG Sensors. IEEE Robot. Autom. Lett. 2016, 1, 1052–1059. [Google Scholar] [CrossRef]
- Li, X.; Wen, R.; Shen, Z.; Wang, Z.; Luk, K.D.K.; Hu, Y. A Wearable Detector for Simultaneous Finger Joint Motion Measurement. IEEE Trans. Biomed. Circuits Syst. 2018, 1, 11. [Google Scholar] [CrossRef]
- Phillips, T.G.; Guenther, N.; McAree, P.R. When the Dust Settles: The Four Behaviors of LiDAR in the Presence of Fine Airborne Particulates. J. Field Rob. 2017, 34, 985–1009. [Google Scholar] [CrossRef]
- Phillips, T.; Hahn, M.; McAree, R. An Evaluation of Ranging Sensor Performance for Mining Automation Applications. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Wollongong, NSW, Australia, 9–12 July 2013; pp. 1284–1289. [Google Scholar]
- Broadway, C.; Min, R.; Leal-Junior, A.G.; Marques, C.; Caucheteur, C. Toward Commercial Polymer Fiber Bragg Grating Sensors: Review and Applications. J. Light. Technol. 2019, 37, 2605–2615. [Google Scholar] [CrossRef]
- Bai, H.; Li, S.; Barreiros, J.; Tu, Y.; Pollock, C.R.; Shepherd, R.F. Stretchable distributed fiber-optic sensors. Science 2020, 370, 848–852. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Zhao, K.; Zhou, B.; Ning, W.; Jiang, K.; Yang, C.; Kong, L.; Dai, Q. Wearable and Skin-Mountable Fiber-Optic Strain Sensors Interrogated by a Free-Running, Dual-Comb Fiber Laser. Adv. Opt. Mater. 2019, 7, 1900086. [Google Scholar] [CrossRef]
- Jha, C.K.; Gajapure, K.; Chakraborty, A.L. Design and Evaluation of an FBG Sensor-Based Glove to Simultaneously Monitor Flexure of Ten Finger Joints. IEEE Sens. J. 2020, 21, 7620–7630. [Google Scholar] [CrossRef]
- Palma, P.D.; Iadicicco, A.; Campopiano, S. Curvature Sensor Based on FBGs Embedded in 3D Printed Patches. IEEE Sens. J. 2021, 21, 17868–17874. [Google Scholar] [CrossRef]
- Cui, J.W.; Zhao, S.Y.; Yang, C.Q.; Tan, J. Parallel Transport Frame for Fiber Shape Sensing. IEEE Photonics J. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Sun, G.K.; Zhang, X.; Dong, M.L.; He, Y.; Yu, M.; Zhu, L. Polyvinyl Chloride Reinforced Soft Silicone Curvature Sensor with Optical Fiber Implantation. Optik 2019, 177, 26–35. [Google Scholar] [CrossRef]
- Li, L.Q.; He, R.J.; Soares, M.S.; Savović, S.; Hu, X.; Marques, C.; Min, R.; Li, X. Embedded FBG-Based Sensor for Joint Movement Monitoring. IEEE Sens. J. 2021, 21, 26793–26798. [Google Scholar] [CrossRef]
- Sahota, J.K.; Gupta, N.; Dhawan, D. Fiber Bragg Grating Sensors for Monitoring of Physical Parameters: A Comprehensive Review. Opt. Eng. 2020, 59, 060901. [Google Scholar] [CrossRef]
- Socorro-Leranoz, A.B.; Diaz, S.; Castillo, S.; Dreyer, U.J.; Martelli, C.; da Silva, J.C.C.; Uzqueda, I.; Gomez, M.; Zamarreno, C.R. Optical System Based on Multiplexed FBGs to Monitor Hand Movements. IEEE Sens. J. 2020, 21, 14081–14089. [Google Scholar] [CrossRef]
- Dipietro, L.; Sabatini, A.M.; Dario, P. Evaluation of an Instrumented Glove for Hand-Movement Acquisition. J. Rehabil. Res. Dev. 2003, 40, 179–190. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Repeatability Index | Average Range (°) | Average SD (°) | Average Error (°) |
|---|---|---|---|
| TF-PIP | 2.320 | 0.831 | 0.264 |
| TF-MCP | 3.145 | 0.941 | 0.243 |
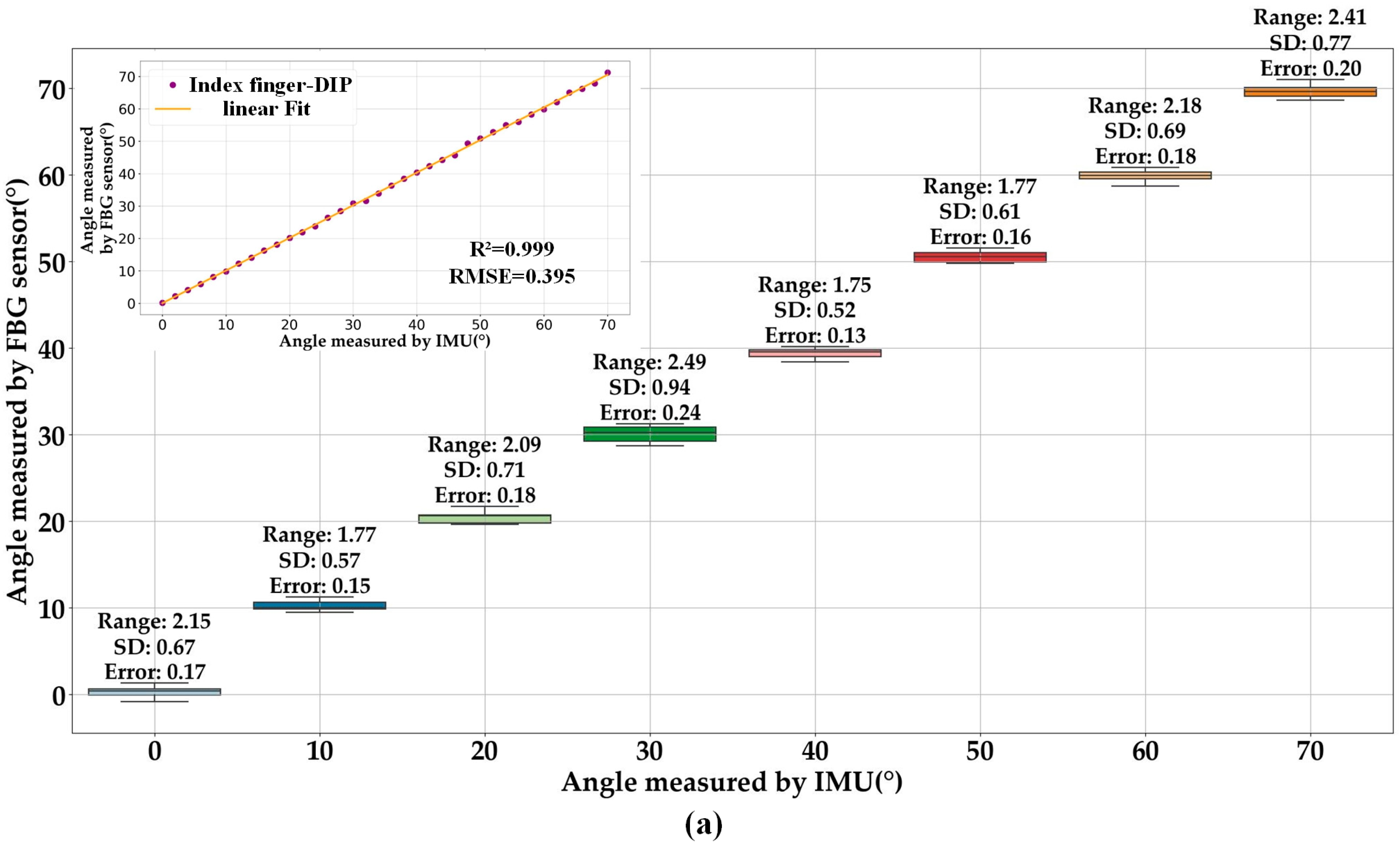
| IF-DIP | 2.076 | 0.685 | 0.176 |
| IF-PIP | 2.310 | 0.711 | 0.184 |
| IF-MCP | 2.233 | 0.720 | 0.188 |
| MF-DIP | 2.480 | 0.761 | 0.198 |
| MF-PIP | 2.825 | 0.836 | 0.217 |
| MF-MCP | 2.628 | 0.848 | 0.220 |
| RF-DIP | 2.585 | 0.784 | 0.204 |
| RF-PIP | 2.785 | 0.825 | 0.215 |
| RF-MCP | 2.701 | 0.841 | 0.218 |
| LF-DIP | 2.533 | 0.774 | 0.200 |
| LF-PIP | 2.514 | 0.768 | 0.198 |
| LF-MCP | 2.768 | 0.814 | 0.209 |
| Mean value | 2.585 | 0.796 | 0.210 |
| Stability (SD) | Gesture 1 | Gesture 2 | Gesture 3 | Gesture 4 | Gesture 5 |
|---|---|---|---|---|---|
| TF-PIP | 0.732 | 0.685 | 0.688 | 0.863 | 0.690 |
| TF-MCP | 0.672 | 0.807 | 0.750 | 0.687 | 0.832 |
| IF-DIP | 0.361 | 0.347 | 0.759 | 0.715 | 0.379 |
| IF-PIP | 0.424 | 0.340 | 0.782 | 0.552 | 0.555 |
| IF-MCP | 0.463 | 0.453 | 1.16 | 0.741 | 0.789 |
| MF-DIP | 0.294 | 0.898 | 0.608 | 0.560 | 0.550 |
| MF-PIP | 0.325 | 1.07 | 0.783 | 0.585 | 0.615 |
| MF-MCP | 0.428 | 1.42 | 0.864 | 0.844 | 0.744 |
| RF-DIP | 0.510 | 0.720 | 0.967 | 0.586 | 0.473 |
| RF-PIP | 0.591 | 1.08 | 0.699 | 0.632 | 0.628 |
| RF-MCP | 0.596 | 0.968 | 0.923 | 0.569 | 0.542 |
| LF-DIP | 0.637 | 0.901 | 0.692 | 0.676 | 0.600 |
| LF-PIP | 0.514 | 0.839 | 0.847 | 0.527 | 0.757 |
| LF-MCP | 0.562 | 1.08 | 1.02 | 0.556 | 0.777 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rao, H.; Luo, B.; Wu, D.; Yi, P.; Chen, F.; Shi, S.; Zou, X.; Chen, Y.; Zhao, M. Study on the Design and Performance of a Glove Based on the FBG Array for Hand Posture Sensing. Sensors 2023, 23, 8495. https://doi.org/10.3390/s23208495
Rao H, Luo B, Wu D, Yi P, Chen F, Shi S, Zou X, Chen Y, Zhao M. Study on the Design and Performance of a Glove Based on the FBG Array for Hand Posture Sensing. Sensors. 2023; 23(20):8495. https://doi.org/10.3390/s23208495
Chicago/Turabian StyleRao, Hongcheng, Binbin Luo, Decao Wu, Pan Yi, Fudan Chen, Shenghui Shi, Xue Zou, Yuliang Chen, and Mingfu Zhao. 2023. "Study on the Design and Performance of a Glove Based on the FBG Array for Hand Posture Sensing" Sensors 23, no. 20: 8495. https://doi.org/10.3390/s23208495