
Implementation of Parameter Observer for Capacitors


Abstract
:1. Introduction
- The implementation of a PO on a microcontroller and its validation on electrolytic capacitors.
- The real-time estimation of the values Ce and Rse of the capacitor during the discharge process, which is about 20 ms.
- An improvement of the estimation method for the time-equivalent constants used to calculate Ce and Rse.
2. Materials and Methods
2.1. Theoretical Support
2.1.1. Determining the Values of Equivalent Parameters of a Capacitor Using the Two-Step Discharge Method and a Discrete-Time Parameter Observer
- 1.
- The time-varying parameter T(t) of the non-autonomous, first-order, unforced dynamical system (1) with properties (2) can be determined using the discrete-time parameter observer (3).
- 2.
- The main application considered in [11] is to determine the equivalent capacitance of a capacitor during a discharging process over a resistor, when the variation in the voltage at the capacitor terminals is assimilated to in Equation (1).
2.1.2. The Influence of the Estimation Accuracy of and on the Calculated Values of the Capacitor Parameters
- As the accuracy of calculating the values of is much higher than that of calculating the values of , the method is suitable for both measuring the value of and for monitoring the values of .
- Under the assumption that the deviations and are kept within constant but restricted limits, the method can also be used for monitoring the variations in , the monotony of its variations being maintained over time.
2.2. Implementation of the Parameter Observer
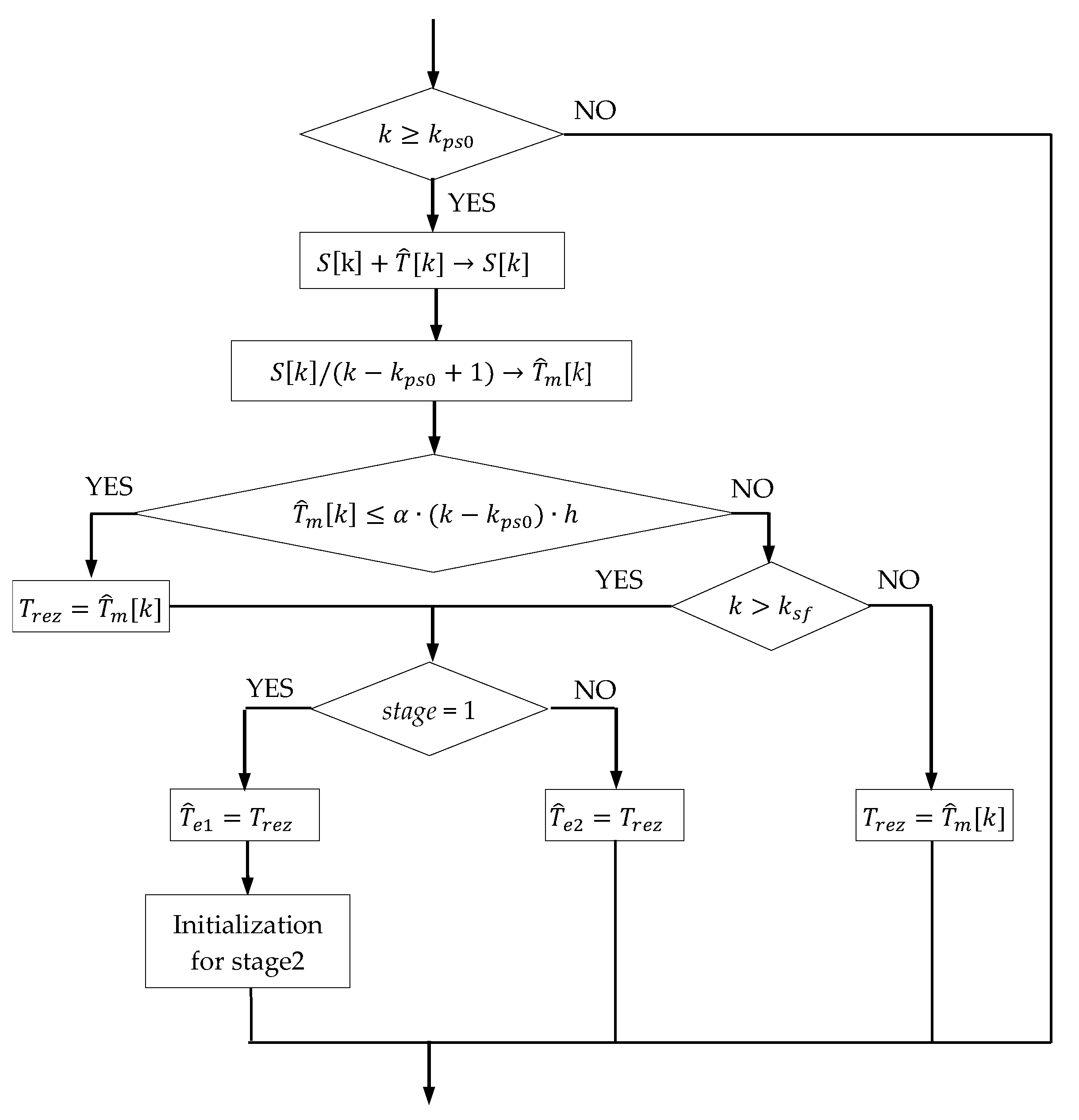
2.2.1. PO−T Implementation Flowchart
2.2.2. Hardware Support
3. Results
- 1C— , SR Passives, CE Series;
- 2C— , Samxon, KM Series;
- 3C— , Elite, EP Series.
4. Discussion
- The aim of our paper was to illustrate that the PO proposed in [11] can be implemented in real time. Implementation has several important attributes that are relevant for a wide range of processes. For example, from the point of view of power electronic applications, we highlight the following key advantages: a good speed of estimation, a reduced computational complexity and a good estimation accuracy [1]. Considering these aspects, we appreciate that the monitoring of capacitors using PO, being a quasi-online method, can be implemented on the same processor that already serves the process. We consider that our objective has been achieved, and we acknowledge this through the explanations below.
- In Section 2.1, we summarized the procedure for determining the values of equivalent parameters of a capacitor using the PO proposed in [11], and we deepen the procedure regarding two aspects: (i) emphasizing the influence of the deviations of and in the result of calculating the equivalent values and ; (ii) extending the bisector’s method by rotating it, expressed by a coefficient explained in Appendix A. Through (i), we highlight the very high sensitivity of the results obtained for in relation to deviations in and , and we empirically argue for the use of a coefficient .
- The implementation of the PO is described in Section 2.2. The hardware support was an i.MX RT1062 microcontroller with Cortex®-M7 architecture. The necessary sampling and processing operations were performed using the ADC.h software component included in the Teensyduino add-in library. We must mention that in this paper, we present the main elements necessary for the reproduction of the application. Note that the cost of hardware support is low. In this context for the PO, we used a sampling period, anticipated in [11], and the acquisition process was performed with a 12-bit resolution and 8× oversampling technique.
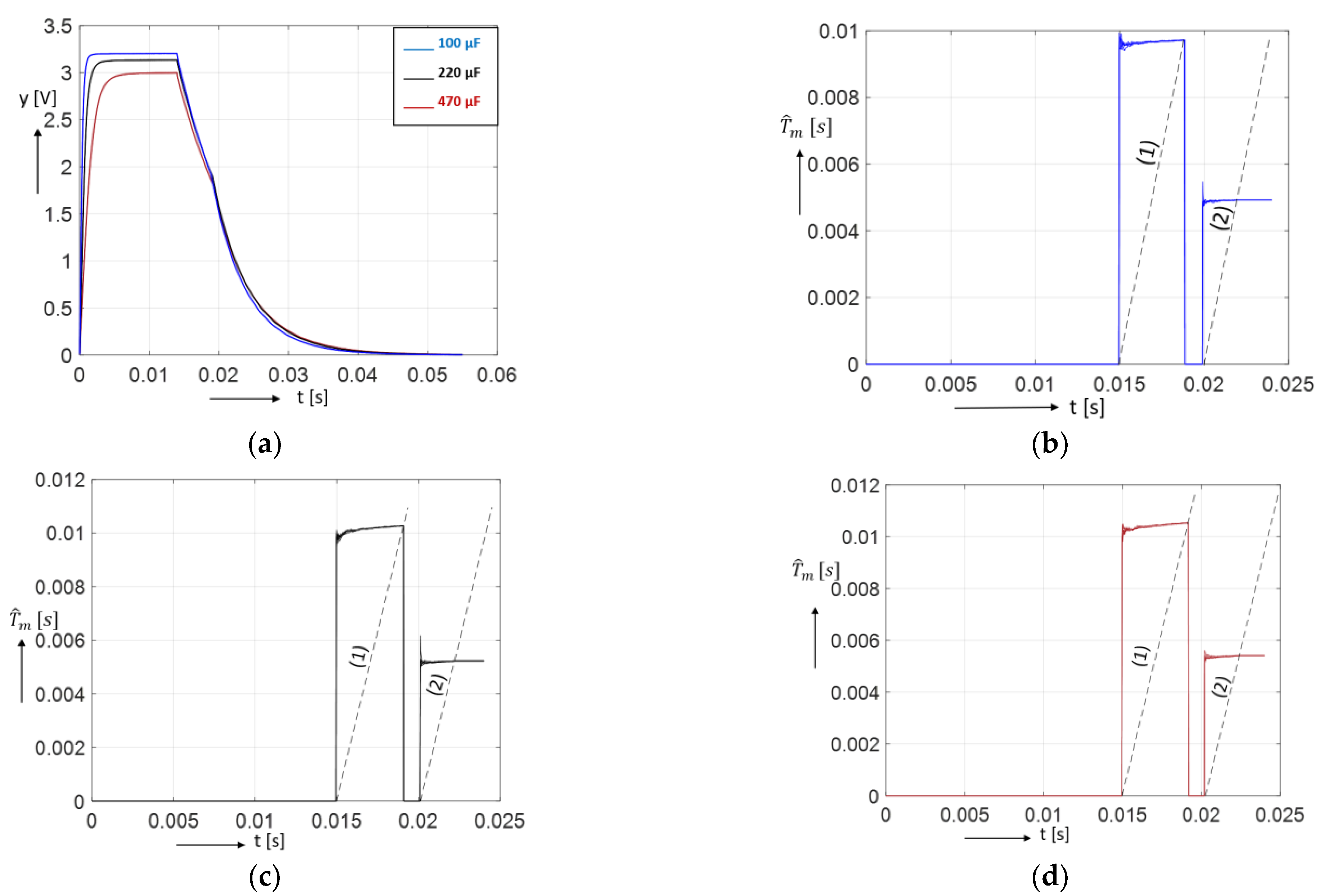
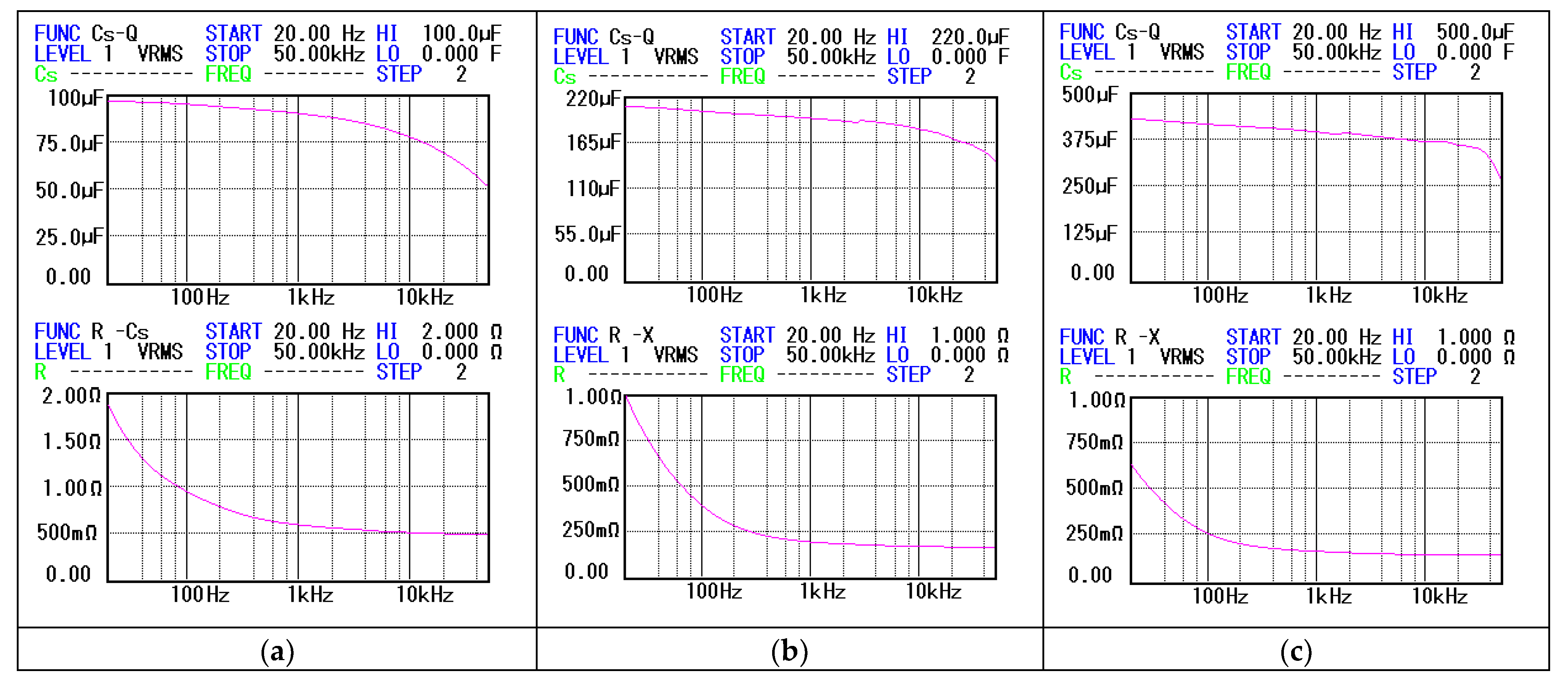
- The actual behavior of the implemented PO is illustrated in Section 3 for three capacitors with , and nominal values. For each capacitor, we presented the results of 5 series of 20 experiments. First, the results show a low dispersion of the values of the equivalent time constants and . Thus, the sample standard deviations related to the average values of and were in the ranges of 0.0482% ÷ 0.0921% and 0.0759% ÷ 0.1871%, respectively. This led, according to the discussion in Section 2.1.2, to limited intervals for sample standard deviations (0.1422% ÷ 0.2120 and 3.6594% ÷ 10.660%, respectively) of the average values of and . Second, the calculated average values of and are found at frequencies below in the measured frequency characteristics of the capacitors. Finally, we note that the off-line regression calculations for 15 two-stage discharge processes showed the same results as the results obtained in real time with PO.
- The low dispersion highlights the potential of the PO for providing precise results, i.e., values of and with a low scattering. Simultaneously, considering and values in relation to their frequency characteristics suggests the potential of the method for obtaining accurate results. The scattering of results is due both to the fact that the discharge processes obey statistical laws and the fact that the errors appear in the sampling of the measured values of the voltage at the capacitor terminals. We consider that by using better hardware and software resources in applications, both precision and accuracy can be improved.
- The experiments described in this paper were performed on independent capacitors. This approach may also be found in other research, for instance, the work in [22]. The use of PO in real applications involves ensuring the quasi-online estimation framework used in this paper [23]. On the one hand, this requires delimitating a very short time for charging/discharging the capacitor, and on the other hand, it is necessary to provide the resistances over which the capacitor is discharged in the two stages in the electrical circuit of the application and to accurately determine its values. The first requirement is met by processes that are not in a continuous operating regime, for example, in the motor driver converter during the stop of the motor driver, solar PV or in processes with intermittent operation. The second requirement is achievable using suitable switching circuits.
- It should also be noted that the experiments reported in this article correspond to some discharges of capacitors during which the voltage spectrum on the capacitor is predominantly at relatively low frequencies. The frequency ranges in Table 2 corroborate this.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ESR | equivalent serial resistance |
| PO | parameter observer |
Appendix A


Appendix B


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 100 | 98 | 96 | 94 | 92 | 90 | 88 | 86 | 84 | 82 | 80 | |
| 1.8 | 2.05 | 2.3 | 2.55 | 2.8 | 3.05 | 3.3 | 3.55 | 3.8 | 4.05 | 4.3 | |
| 1.15 | 1.2 | 1.09 | 1.21 | 1.06 | 1.14 | 1.165 | 1.098 | 1.17 | 1.08 | 1.12 | |
| 1.54 | 1.48 | 1.495 | 1.533 | 1.541 | 1.44 | 1.55 | 1.56 | 1.46 | 1.5 | 1.55 | |
| 100.74 | 98.89 | 96.64 | 48.82 | 92.51 | 90.74 | 88.66 | 86.52 | 84.72 | 82.51 | 80.52 | |
| 2.208 | 2.344 | 2.73 | 2.895 | 3.319 | 3.375 | 3.72 | 4.059 | 4.121 | 4.519 | 4.784 |

References
- Al-Greer, M.; Armstrong, M.; Ahmeid, M.; Giaouris, D. Advances on system identification techniques for DC–DC switch mode power converter applications. IEEE Trans. Power Electron. 2019, 34, 6973–6990. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, M.W.; Agarwal, N.; Anand, S. Online Monitoring Technique for Aluminum Electrolytic Capacitor in Solar PV-Based DC System. IEEE Trans. Ind. Electron. 2016, 63, 7059–7066. [Google Scholar] [CrossRef]
- Miao, W.; Liu, X.; Lam, K.H.; Pong, P.W.T. Condition Monitoring of Electrolytic Capacitors in Boost Converters by Magnetic Sensors. IEEE Sens. J. 2019, 19, 10393–10402. [Google Scholar] [CrossRef]
- Dang, H.-L.; Kwak, S. Review of health monitoring techniques for capacitors used in power electronics converters. Sensors 2020, 20, 3740. [Google Scholar] [CrossRef] [PubMed]
- Laadjal, K.; Bento, F.; Cardoso, A.J.M. On-Line Diagnostics of Electrolytic Capacitors in Fault-Tolerant LED Lighting Systems. Electronics 2022, 11, 1444. [Google Scholar] [CrossRef]
- Soliman, H.; Wang, H.; Blaabjerg, F. A Review of the Condition Monitoring of Capacitors in Power Electronic Converters. IEEE Trans. Ind. Appl. 2016, 52, 4976–4989. [Google Scholar] [CrossRef]
- Kareem, A.B.; Hur, J.-W. Towards Data-Driven Fault Diagnostics Framework for SMPS-AEC Using Supervised Learning Algorithms. Electronics 2022, 11, 2492. [Google Scholar] [CrossRef]
- Meng, J.; Chen, E.-X.; Ge, S.-J. Online E-cap condition monitoring method based on state observer. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; Available online: https://ieeexplore.ieee.org/abstract/document/8590416/ (accessed on 25 April 2022).
- Yao, K.; Li, H.; Li, L.; Guan, C.; Li, L.; Zhang, Z.; Chen, J. A Noninvasive Online Monitoring Method of Output Capacitor’s C and ESR for DCM Flyback Converter. IEEE Trans. Power Electron. 2019, 34, 5748–5763. [Google Scholar] [CrossRef]
- Deng, F.; Lü, Y.; Liu, C.; Heng, Q.; Yu, Q.; Zhao, J. Overview on submodule topologies, modeling, modulation, control schemes, fault diagnosis, and tolerant control strategies of modular multilevel converters. Chin. J. Electr. Eng. 2020, 6, 1–21. [Google Scholar] [CrossRef]
- Bărbulescu, C.; Căiman, D.-V.; Dragomir, T.-L. Parameter Observer Useable for the Condition Monitoring of a Capacitor. Appl. Sci. 2022, 12, 4891. [Google Scholar] [CrossRef]
- Lodi, M.; Oliveri, A. Online Estimation of the Current Ripple on a Saturating Ferrite-Core Inductor in a Boost Converter. Sensors 2020, 20, 2921. [Google Scholar] [CrossRef] [PubMed]
- Liang, C.-M.; Lin, Y.-J.; Chen, J.-Y.; Chen, G.-R.; Yang, S.-C. Sensorless lc filter implementation for permanent magnet machine drive using observer-based voltage and current estimation. Sensors 2021, 21, 3596. [Google Scholar] [CrossRef]
- Barbulescu, C.; Dragomir, T.-L. Parameter estimation for a simplified model of an electrolytic capacitor in transient regimes. J. Phys. Conf. Ser. 2021, 2090, 012143. [Google Scholar] [CrossRef]
- Ren, L.; Gong, C.; Zhao, Y. An Online ESR Estimation Method for Output Capacitor of Boost Converter. IEEE Trans. Power Electron. 2019, 34, 10153–10165. [Google Scholar] [CrossRef]
- Abdennadher, K.; Venet, P.; Rojat, G.; Rétif, J.-M.; Rosset, C. A Real-Time Predictive-Maintenance System of Aluminum Electrolytic Capacitors Used in Uninterrupted Power Supplies. IEEE Trans. Ind. Appl. 2010, 46, 1644–1652. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, N.; Ahmad, M.W.; Anand, S. Quasi-Online Technique for Health Monitoring of Capacitor in Single-Phase Solar Inverter. IEEE Trans. Power Electron. 2018, 33, 5283–5291. [Google Scholar] [CrossRef]
- Wu, Y.; Du, X. A VEN Condition Monitoring Method of DC-Link Capacitors for Power Converters. IEEE Trans. Ind. Electron. 2019, 66, 1296–1306. [Google Scholar] [CrossRef]
- Semiconductors, NXP®, i.MX Reference Manual. Available online: https://www.nxp.com/docs/en/nxp/data-sheets/IMXRT1060CEC.pdf (accessed on 1 December 2022).
- SILABS. Improving ADC Resolution by Oversampling and Averaging. 2013. Available online: https://www.silabs.com/documents/public/application-notes/an118.pdf (accessed on 1 December 2022).
- PJRC. Teensyduino. Available online: https://www.pjrc.com/teensy/teensyduino.html (accessed on 1 December 2022).
- Yang, Z.; Xi, L.; Zhang, Y.; Chen, X. An Online Parameter Identification Method for Non-Solid Aluminum Electrolytic Capacitors. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3475–3479. [Google Scholar] [CrossRef]
- Mouser Electronics, Reference Guide to Switched DC/DC Conversion. Available online: https://emea.info.mouser.com/dc-dc-converter-guide?cid=homepage&pid=mouser (accessed on 1 December 2022).











| No. of Series of Experiments | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 9.7106 | 4.9235 | 96.806 | 1.41 | 0.0654 | 0.1323 | 0.1869 | 10.660 | 9.7157 | 4.9235 | 9.6736 | 4.9581 |
| 10.274 | 5.2278 | 203.89 | 0.890 | 0.0582 | 0.0964 | 0.1675 | 7.0825 | 10.266 | 5.2333 | 10.224 | 5.2890 | |
| 10.536 | 5.4137 | 413.08 | 0.706 | 0.05655 | 0.1138 | 0.1671 | 4.8510 | 10.533 | 5.4087 | 10.474 | 5.2890 | |
| 2 | 9.7167 | 4.9213 | 96.974 | 1.299 | 0.0654 | 0.1323 | 0.1869 | 9.0055 | 9.7149 | 4.9181 | 9.6760 | 4.9646 |
| 10.269 | 5.2251 | 203.81 | 0.887 | 0.0482 | 0.1575 | 0.1905 | 9.7135 | 10.266 | 5.2158 | 10.217 | 5.2798 | |
| 10.551 | 5.4171 | 413.96 | 0.686 | 0.0664 | 0.1028 | 0.1422 | 3.9733 | 10.548 | 5.4203 | 10.482 | 5.4691 | |
| 3 | 9.7231 | 4.9224 | 97.082 | 1.254 | 0.0598 | 0.0759 | 0.1425 | 7.8331 | 9.7234 | 4.9247 | 9.6845 | 4.9684 |
| 10.270 | 5.2275 | 203.76 | 0.905 | 0.0921 | 0.1082 | 0.2120 | 7.9177 | 10.272 | 5.2256 | 10.222 | 5.2887 | |
| 10.536 | 5.4123 | 413.23 | 0.698 | 0.0519 | 0.1871 | 0.2078 | 7.1817 | 10.538 | 5.4125 | 10.467 | 5.4687 | |
| 4 | 9.7120 | 4.9200 | 96.907 | 1.321 | 0.0798 | 0.0970 | 0.2211 | 11.528 | 9.7082 | 4.9203 | 9.6772 | 4.9628 |
| 10.270 | 5.2271 | 203.75 | 0.904 | 0.0575 | 0.1085 | 0.1739 | 7.5261 | 10.271 | 5.2279 | 10.217 | 5.2896 | |
| 10.537 | 5.4097 | 413.52 | 0.682 | 0.0557 | 0.1027 | 0.1765 | 5.0745 | 10.541 | 5.4075 | 10.474 | 5.4846 | |
| 5 | 9.7115 | 4918.2 | 96.933 | 1.288 | 0.0662 | 0.0999 | 0.1632 | 9.2708 | 9.7110 | 4.9214 | 9.6732 | 4.9532 |
| 10.274 | 5.2289 | 203.84 | 0.901 | 0.0705 | 0.1110 | 0.1568 | 6.5866 | 10.268 | 5.2272 | 10.222 | 5.2809 | |
| 10.534 | 5.4096 | 413.31 | 0.689 | 0.0705 | 0.0766 | 0.1518 | 3.6594 | 10.532 | 5.4032 | 10.472 | 5.4621 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bărbulescu, C.; Căiman, D.-V.; Nanu, S.; Dragomir, T.-L. Implementation of Parameter Observer for Capacitors. Sensors 2023, 23, 948. https://doi.org/10.3390/s23020948
Bărbulescu C, Căiman D-V, Nanu S, Dragomir T-L. Implementation of Parameter Observer for Capacitors. Sensors. 2023; 23(2):948. https://doi.org/10.3390/s23020948
Chicago/Turabian StyleBărbulescu, Corneliu, Dadiana-Valeria Căiman, Sorin Nanu, and Toma-Leonida Dragomir. 2023. "Implementation of Parameter Observer for Capacitors" Sensors 23, no. 2: 948. https://doi.org/10.3390/s23020948