

MD-GCN: A Multi-Scale Temporal Dual Graph Convolution Network for Traffic Flow Prediction
Abstract
:1. Introduction
- We propose a dual graph convolution framework with graph sampling and aggregation (GraphSAGE) and mix-hop propagation graph convolution (MGCN) to capture spatial information. By fusing the neighbor nodes information extracted with these two methods, the capability of capturing spatial relations can be further improved.
- We propose a multi-scale temporal convolution with a gated mechanism as a temporal block, in which the temporal correlation of traffic data at different scales is extracted using convolution kernels of different sizes, and the obtained features are fused and adjusted by an efficient pyramid split attention module (EPSA).
- These experimental results conducted on four public datasets show that our proposed algorithm outperforms the existing methods.
2. Related Work
2.1. Traffic Prediction Based on Graph Convolution Networks
2.2. Traffic Prediction Based on Temporal Convolution Networks
3. Preliminaries
4. The Framework of MD-GCN
4.1. Temporal Block
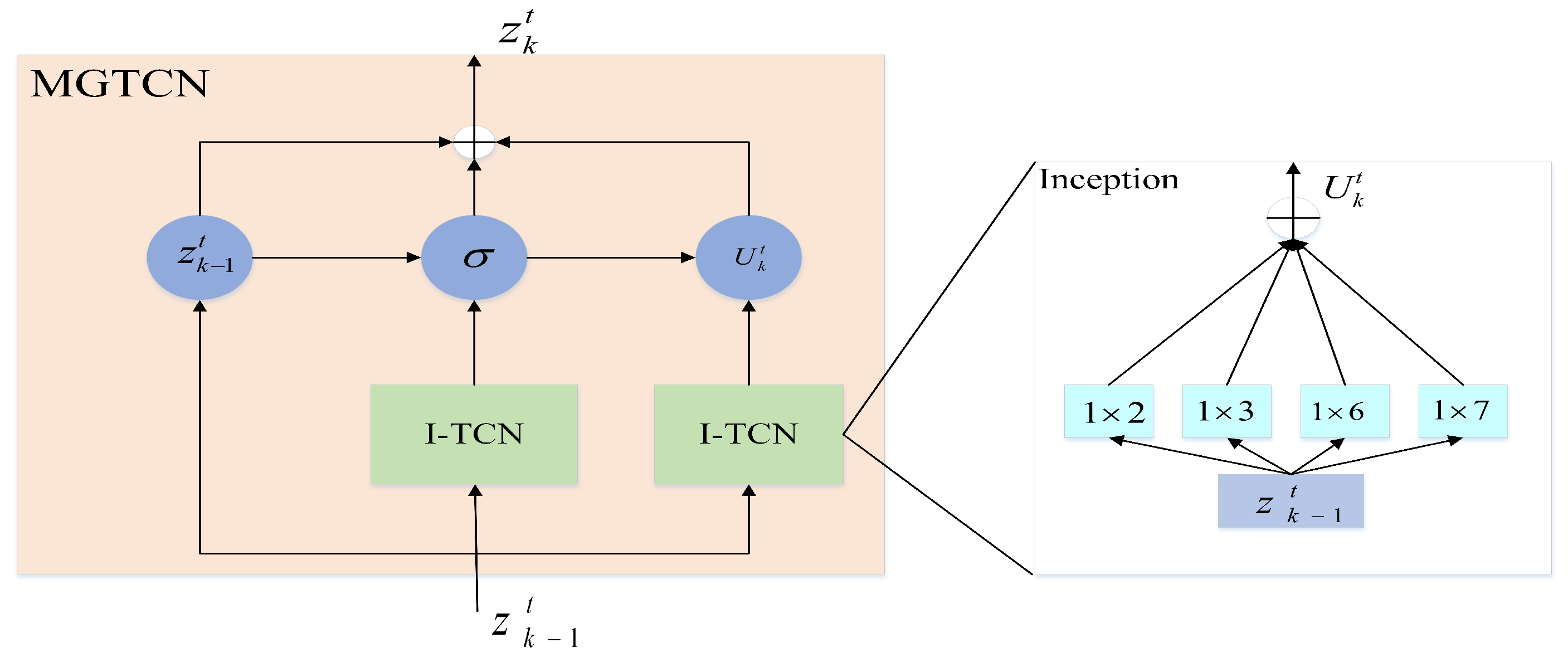
4.1.1. Multi-Scale Gated Temporal Convolution (MGTCN)
4.1.2. Efficient Pyramid Split Attention Module (EPSA)
4.2. Spatial Block
4.2.1. Graph Sampling and Aggregation Module (GraphSAGE)
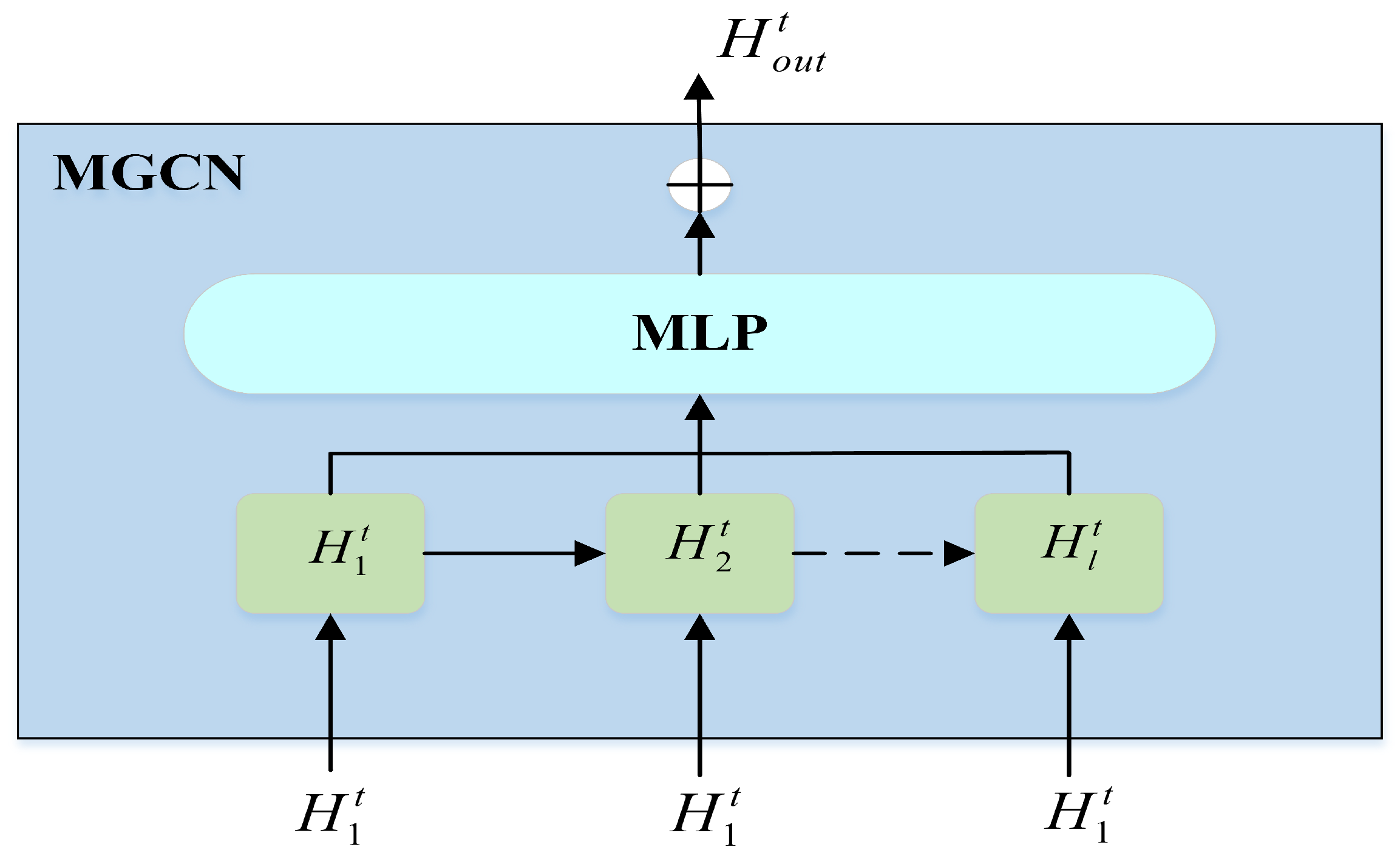
4.2.2. Mix-Hop Propagation Graph Convolution Module (MGCN)
5. Experiments
5.1. Experiment Setup
5.1.1. Dataset
- METR-LA [14,15]: It is a public traffic speed dataset collected from Los Angeles County highways that contains data from 207 sensors from 1 March 2012 to 30 June 2012. Sensors are used to detect the presence or passage of vehicles, mainly detecting traffic information, including traffic flow and traffic speed information. Traffic speed is recorded every five minutes for a total of 34,272 time slices.
- PEMS-BAY [14,15]: It is a dataset of public traffic speeds collected from the California Department of Transportation measurement system. Specifically, PEMS-BAY contains data from 325 sensors in the Gulf over a six-month period from 1 January 2017 to 31 May 2017. Traffic information is recorded at a rate of 5 min with a total 52,116 time slices.
- PEMS04 [28,35]: It is a dataset of public traffic flows collected from CalTrans PeMS. Specifically, PEMS04 contains data from 307 sensors in District 04 over a two-month period from 1 January 2018 to 28 February 2018. Traffic information is recorded every 5 min, and the total number of time slices is 16,992.
- PEMS08 [28,35]: It is a dataset of public traffic flow collected from CalTrans PeMS. Specifically, PEMS08 contains data from 170 sensors in District 08 for a two-month period from 1 July 2018 to 31 August 2018. Traffic information is recorded every 5 min, and the total number of time slices is 17,856.
5.1.2. Parameter Setting
5.1.3. Evaluation Function
5.2. Baselines
- FC-LSTM [17]: This model uses a Long Short-Term Memory network with fully connected hidden cells to predict traffic data.
- T-GCN [24]: This model uses, respectively, GCN and GRU to capture the spatial and temporal correlations of transportation networks.
- Graph WaveNet [15]: This model introduces a self-adaptive graph to capture the hidden spatial dependency and uses dilated convolution to capture the temporal dependency.
- STFGNN [35]: This model uses spatial–temporal graphs to capture spatial–temporal correlations in traffic networks.
- STSGCN [28]: This model uses a spatial–temporal synchronous graph convolution network to independently model local correlations through a local time–space subgraph module.
- DCRNN [25]: This model uses a diffusion–convolution recursive neural network, which combines diffusion graph convolution with a recurrent neural network.
- STGCN [33]: The model combines graph convolution with one-dimensional convolution to capture spatial–temporal correlations.
- ASTGCN [30]: This model uses a spatial–temporal attention mechanism to capture the dynamic spatial–temporal characteristics of traffic data.
- MTGNN [14]: This is a multi-variable time series prediction model using a graph neural network from a graph perspective.
5.3. Convergence Analysis
5.4. Parameters Study
5.5. Experimental Results
5.6. Ablation Experiments
- w/o GraphSAGE: In the mixed hop propagation graph convolution module, we remove the GraphSAGE module.
- w/o EPSALayer: In the temporal module, we remove the efficient pyramid split attention module.
- w/o MGTCN: We replace the multi-scale gated temporal convolution module with a normal time convolution module.
5.7. A Case Study
5.8. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yuan, H.; Li, G. A survey of traffic prediction: From spatio-temporal data to intelligent transportation. Data Sci. Eng. 2021, 6, 63–85. [Google Scholar] [CrossRef]
- Fang, Z.; Pan, L.; Chen, L.; Du, Y.; Gao, Y. MDTP: A multi-source deep traffic prediction framework over spatio-temporal trajectory data. Proc. VLDB Endow. 2021, 14, 1289–1297. [Google Scholar] [CrossRef]
- Lana, I.; Del Ser, J.; Velez, M.; Vlahogianni, E.I. Road traffic forecasting: Recent advances and new challenges. IEEE Intell. Transp. Syst. Mag. 2018, 10, 93–109. [Google Scholar] [CrossRef]
- Ye, J.; Zhao, J.; Ye, K.; Xu, C. How to build a graph-based deep learning architecture in traffic domain: A survey. IEEE Trans. Intell. Transp. Syst. 2020, 23, 3904–3924. [Google Scholar] [CrossRef]
- Zhou, J.; Cui, G.; Hu, S.; Zhang, Z.; Yang, C.; Liu, Z.; Wang, L.; Li, C.; Sun, M. Graph neural networks: A review of methods and applications. AI Open 2020, 1, 57–81. [Google Scholar] [CrossRef]
- Lee, K.; Eo, M.; Jung, E.; Yoon, Y.; Rhee, W. Short-term traffic prediction with deep neural networks: A survey. IEEE Access 2021, 9, 54739–54756. [Google Scholar] [CrossRef]
- Luo, X.; Niu, L.; Zhang, S. An algorithm for traffic flow prediction based on improved SARIMA and GA. KSCE J. Civ. Eng. 2018, 22, 4107–4115. [Google Scholar] [CrossRef]
- Fang, M.; Tang, L.; Yang, X.; Chen, Y.; Li, C.; Li, Q. FTPG: A fine-grained traffic prediction method with graph attention network using big trace data. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5163–5175. [Google Scholar] [CrossRef]
- Yin, X.; Wu, G.; Wei, J.; Shen, Y.; Qi, H.; Yin, B. Deep learning on traffic prediction: Methods, analysis and future directions. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4927–4943. [Google Scholar] [CrossRef]
- Liang, Y.; Ke, S.; Zhang, J.; Yi, X.; Zheng, Y. Geoman: Multi-level attention networks for geo-sensory time series prediction. In Proceedings of the 27th the International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 13–19 July 2018; Volume 2018, pp. 3428–3434. [Google Scholar]
- Zheng, C.; Fan, X.; Wang, C.; Qi, J. Gman: A graph multi-attention network for traffic prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 1234–1241. [Google Scholar]
- Yao, H.; Tang, X.; Wei, H.; Zheng, G.; Li, Z. Revisiting spatial-temporal similarity: A deep learning framework for traffic prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 5668–5675. [Google Scholar]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Philip, S.Y. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Pan, S.; Long, G.; Jiang, J.; Chang, X.; Zhang, C. Connecting the dots: Multivariate time series forecasting with graph neural networks. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual Event, 6–10 July 2020; pp. 753–763. [Google Scholar]
- Wu, Z.; Pan, S.; Long, G.; Jiang, J.; Zhang, C. Graph wavenet for deep spatial-temporal graph modeling. In Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, 10–16 August 2019; pp. 1907–1913. [Google Scholar]
- Chen, W.; Chen, L.; Xie, Y.; Cao, W.; Gao, Y.; Feng, X. Multi-range attentive bicomponent graph convolutional network for traffic forecasting. In Proceedings of the AAAI conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 3529–3536. [Google Scholar]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. Adv. Neural Inf. Process. Syst. 2014, 27, 3104–3112. [Google Scholar]
- Sun, P.; Boukerche, A.; Tao, Y. SSGRU: A novel hybrid stacked GRU-based traffic volume prediction approach in a road network. Comput. Commun. 2020, 160, 502–511. [Google Scholar] [CrossRef]
- Zhang, Q.; Chang, J.; Meng, G.; Xiang, S.; Pan, C. Spatio-temporal graph structure learning for traffic forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 1177–1185. [Google Scholar]
- Yu, F.; Koltun, V. Multi-scale context aggregation by dilated convolutions. arXiv 2016, arXiv:1511.07122. [Google Scholar]
- Tedjopurnomo, D.A.; Bao, Z.; Zheng, B.; Choudhury, F.; Qin, A.K. A survey on modern deep neural network for traffic prediction: Trends, methods and challenges. IEEE Trans. Knowl. Data Eng. 2022, 34, 1544–1561. [Google Scholar] [CrossRef]
- Zhang, W.; Yu, Y.; Qi, Y.; Shu, F.; Wang, Y. Short-term traffic flow prediction based on spatio-temporal analysis and CNN deep learning. Transp. A Transp. Sci. 2019, 15, 1688–1711. [Google Scholar] [CrossRef]
- Bogaerts, T.; Masegosa, A.D.; Angarita-Zapata, J.S.; Onieva, E.; Hellinckx, P. A graph CNN-LSTM neural network for short and long-term traffic forecasting based on trajectory data. Transp. Res. Part C Emerg. Technol. 2020, 112, 62–77. [Google Scholar] [CrossRef]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-gcn: A temporal graph convolutional network for traffic prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3848–3858. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting. In Proceedings of the 6th International Conference on Learning Representations, Vancouver, BC, Canada, 30 April–3 May 2018; pp. 1–16. [Google Scholar]
- Dai, R.; Xu, S.; Gu, Q.; Ji, C.; Liu, K. Hybrid spatio-temporal graph convolutional network: Improving traffic prediction with navigation data. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual Event, 6–10 July 2020; pp. 3074–3082. [Google Scholar]
- Lu, B.; Gan, X.; Jin, H.; Fu, L.; Zhang, H. Spatio temporal adaptive gated graph convolution network for urban traffic flow forecasting. In Proceedings of the 29th ACM International Conference on Information & Knowledge Management, Online, 19–23 October 2020; pp. 1025–1034. [Google Scholar]
- Song, C.; Lin, Y.; Guo, S.; Wan, H. Spatial-temporal synchronous graph convolutional networks: A new framework for spatial-temporal network data forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 914–921. [Google Scholar]
- Bai, L.; Yao, L.; Li, C.; Wang, X.; Wang, C. Adaptive graph convolutional recurrent network for traffic forecasting. Adv. Neural Inf. Process. Syst. 2020, 33, 17804–17815. [Google Scholar]
- Guo, S.; Lin, Y.; Feng, N.; Song, C.; Wan, H. Attention based spatial-temporal graph convolutional networks for traffic flow forecasting. In Proceedings of the AAAI conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 922–929. [Google Scholar]
- Guo, K.; Hu, Y.; Sun, Y.; Qian, S.; Gao, J.; Yin, B. Hierarchical Graph Convolution Network for Traffic Forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtually, 2–9 February 2021; Volume 35, pp. 151–159. [Google Scholar]
- Zhang, H.; Zu, K.; Lu, J.; Zou, Y.; Meng, D. Epsanet: An efficient pyramid split attention block on convolutional neural network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 19–25 June 2021; pp. 1–11. [Google Scholar]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 13–19 July 2018; pp. 3634–3640. [Google Scholar]
- Tian, C.; Chan, W.K. Spatial-temporal attention wavenet: A deep learning framework for traffic prediction considering spatial-temporal dependencies. IET Intell. Transp. Syst. 2021, 15, 549–561. [Google Scholar] [CrossRef]
- Li, M.; Zhu, Z. Spatial-temporal fusion graph neural networks for traffic flow forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtually, 2–9 February 2021; Volume 35, pp. 4189–4196. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Dataset | Sensor (Nodes) | Edges | Time Step |
|---|---|---|---|---|
| Speed | METR-LA | 207 | 1722 | 34,272 |
| Speed | PMES-BAY | 325 | 2694 | 52,116 |
| Flow | PEMS04 | 307 | 680 | 16,992 |
| Flow | PEMS08 | 170 | 548 | 17,856 |
| Parameters | Value |
|---|---|
| Input length (S) | 12 |
| Output length (T) | 12 |
| Spatial–temporal block (N) | 3 |
| Temporal block (K) | 3 |
| Spatial block (L) | 2 |
| Hidden layers | 64 |
| Batch Size | 32 |
| Optimizer | adam |
| Horizon 3 | Horizon 6 | Horizon 12 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Method | MAE | RMSE | MAPE (%) | MAE | RMSE | MAPE (%) | MAE | RMSE | MAPE (%) |
| FC-LSTM | 3.44 | 6.30 | 9.60 | 3.77 | 7.23 | 10.09 | 4.37 | 8.69 | 14.00 |
| T-GCN | 3.03 | 5.26 | 7.81 | 3.52 | 6.12 | 9.45 | 4.30 | 7.31 | 11.80 |
| DCRNN | 2.77 | 5.38 | 7.30 | 3.15 | 6.45 | 8.80 | 3.60 | 7.60 | 10.50 |
| STGCN | 2.88 | 5.74 | 9.21 | 3.47 | 7.24 | 9.57 | 4.59 | 9.40 | 12.70 |
| ASTGCN | 4.86 | 9.27 | 7.81 | 5.43 | 10.61 | 10.13 | 6.51 | 12.52 | 11.64 |
| STSGCN | 3.31 | 7.62 | 8.06 | 4.13 | 9.77 | 10.29 | 5.06 | 11.66 | 12.91 |
| Graph WaveNet | 2.69 | 5.15 | 6.90 | 3.07 | 6.22 | 8.37 | 3.53 | 7.37 | 10.01 |
| MTGNN | 2.69 | 5.18 | 6.86 | 3.05 | 6.17 | 8.19 | 3.49 | 7.23 | 9.87 |
| MD-GCN (Ours) | 2.65 | 5.09 | 6.82 | 2.99 | 6.06 | 8.19 | 3.43 | 7.15 | 10.04 |
| Horizon 3 | Horizon 6 | Horizon 12 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Method | MAE | RMSE | MAPE (%) | MAE | RMSE | MAPE (%) | MAE | RMSE | MAPE (%) |
| FC-LSTM | 2.05 | 4.19 | 4.80 | 2.20 | 4.55 | 5.20 | 2.37 | 4.96 | 5.70 |
| T-GCN | 1.50 | 2.83 | 3.14 | 1.73 | 3.40 | 3.76 | 2.18 | 4.35 | 4.94 |
| DCRNN | 1.38 | 2.95 | 2.90 | 1.74 | 3.97 | 3.90 | 2.07 | 4.74 | 4.90 |
| STGCN | 1.36 | 2.96 | 2.90 | 1.81 | 4.27 | 4.17 | 2.49 | 5.69 | 5.79 |
| ASTGCN | 1.52 | 3.13 | 3.22 | 2.01 | 4.27 | 4.28 | 2.61 | 5.42 | 6.00 |
| STSGCN | 1.44 | 3.01 | 3.04 | 1.83 | 4.18 | 4.17 | 2.26 | 5.21 | 5.40 |
| Graph WaveNet | 1.30 | 2.74 | 2.73 | 1.63 | 3.70 | 3.67 | 1.95 | 4.52 | 4.63 |
| MTGNN | 1.32 | 2.79 | 2.77 | 1.65 | 3.74 | 3.69 | 1.94 | 4.49 | 4.53 |
| MD-GCN(Ours) | 1.32 | 2.81 | 2.77 | 1.64 | 2.71 | 3.66 | 1.92 | 4.40 | 4.45 |
| PMES04 (Mean) | PMES08 (Mean) | |||||
|---|---|---|---|---|---|---|
| Method | MAE | RMSE | MAPE (%) | MAE | RMSE | MAPE (%) |
| FC-LSTM | 27.14 | 41.59 | 18.20 | 2.20 | 22.20 | 34.06 |
| T-GCN | 21.34 | 32.35 | 14.42 | 17.86 | 26.12 | 10.76 |
| DCRNN | 22.16 | 34.22 | 14.83 | 17.86 | 27.83 | 11.45 |
| STGCN | 22.70 | 35.55 | 14.59 | 18.02 | 27.83 | 11.40 |
| ASTGCN | 22.93 | 35.22 | 16.56 | 18.61 | 28.16 | 13.08 |
| STSGCN | 21.19 | 33.65 | 13.90 | 17.13 | 26.80 | 10.96 |
| Graph WaveNet | 25.45 | 39.70 | 17.29 | 19.83 | 31.05 | 12.68 |
| STFGNN | 19.83 | 31.88 | 13.02 | 16.64 | 26.22 | 10.60 |
| MTGNN | 19.90 | 31.73 | 13.46 | 16.55 | 25.48 | 10.50 |
| MD-GCN(Ours) | 19.47 | 30.96 | 13.33 | 15.62 | 24.36 | 10.26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Wang, J.; Lan, Y.; Jiang, C.; Yuan, X. MD-GCN: A Multi-Scale Temporal Dual Graph Convolution Network for Traffic Flow Prediction. Sensors 2023, 23, 841. https://doi.org/10.3390/s23020841
Huang X, Wang J, Lan Y, Jiang C, Yuan X. MD-GCN: A Multi-Scale Temporal Dual Graph Convolution Network for Traffic Flow Prediction. Sensors. 2023; 23(2):841. https://doi.org/10.3390/s23020841
Chicago/Turabian StyleHuang, Xiaohui, Junyang Wang, Yuanchun Lan, Chaojie Jiang, and Xinhua Yuan. 2023. "MD-GCN: A Multi-Scale Temporal Dual Graph Convolution Network for Traffic Flow Prediction" Sensors 23, no. 2: 841. https://doi.org/10.3390/s23020841