3.1. Results Relative to the PSP-Based Approach
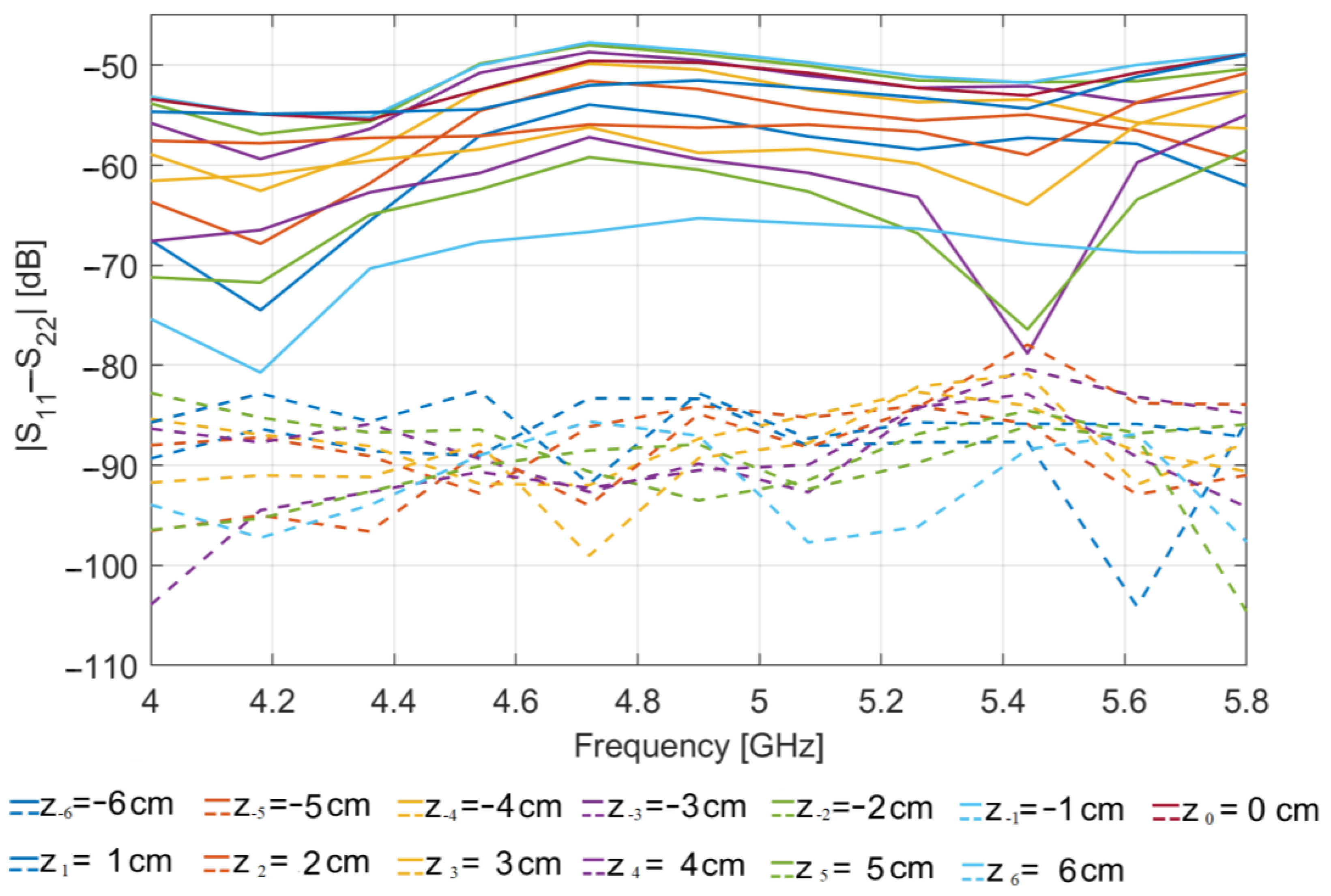
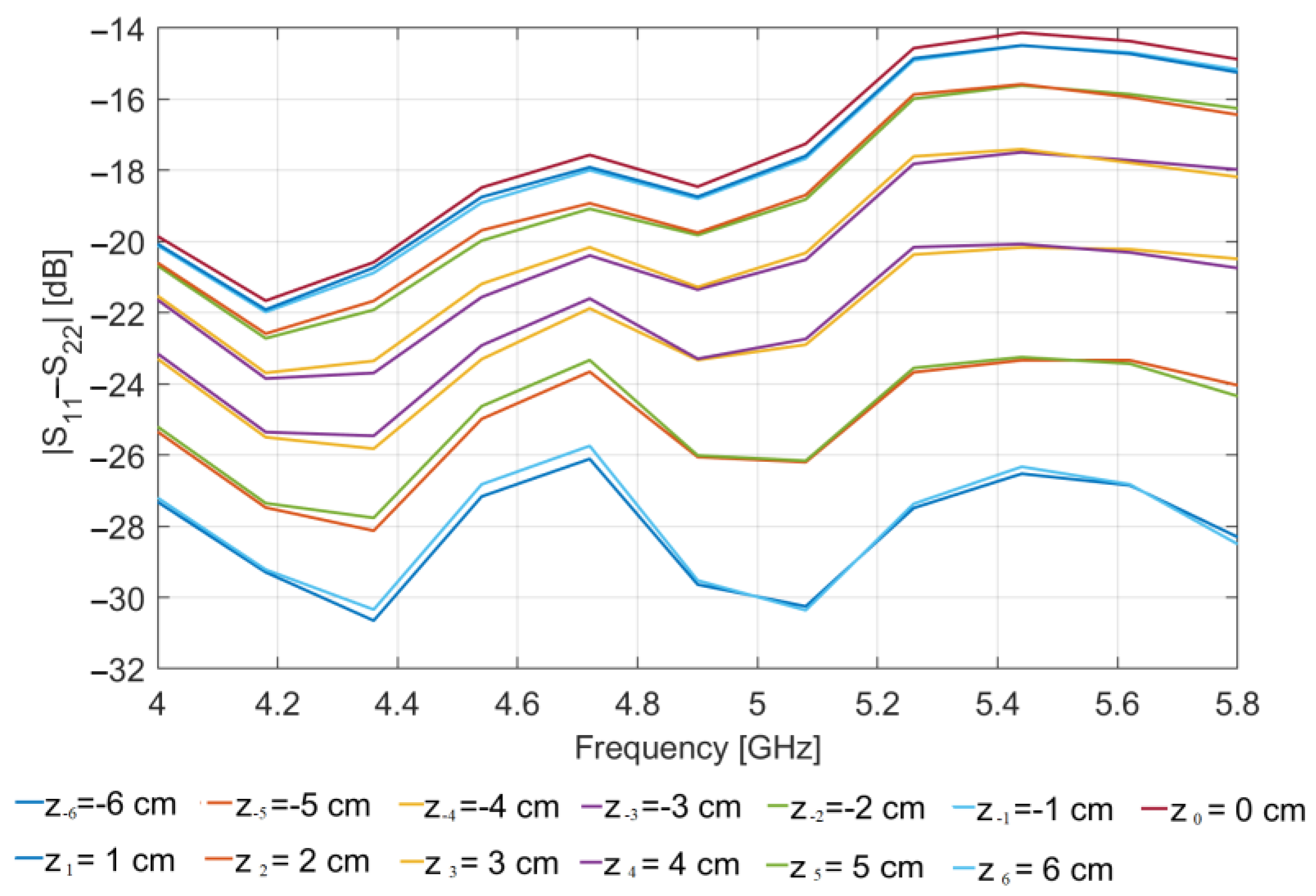
Figure 5 shows the magnitude (in dB) vs. frequency of the difference between S
11(z
n) and S
22(z
n) simulated at the two antenna ports, for each of the positions z
n at which the OUT is probed, when the glass inclusion is present in the OUT (solid lines). For comparison,
Figure 5 also reports the same plots obtained when no inclusion is present (dashed lines).
As it can be seen, the values of |S11−S22| obtained in presence of the inclusion are appreciably larger than those in absence of it, clearly indicating that the presence of the glass inclusion breaks the symmetry of the OUT (and of the MWI system) with respect to the xz-plane, thereby determining an appreciable difference in the reflection coefficients measured at the two antenna ports, not detected in absence of inclusion. From the figure, one can also note that the level of such difference variates with the position at which the OUT is probed: it is higher when the inclusion is nearer to the antennas and lower when the inclusion is farer. This is an expected result due to the directivity of the employed antennas and confirms that for the application at hand a more convenient choice is that of employing poorly directive antennas.
The detected differential data can be then processed to establish the presence of the inclusion (detection) and possibly to image it by means of the linear inversion algorithm described in
Section 2.4. To simulate the effect of the measurement noise, we added to the data a white Gaussian noise with a level of −65 dB (which is consistent with the noise level characterizing commercially available VNAs).
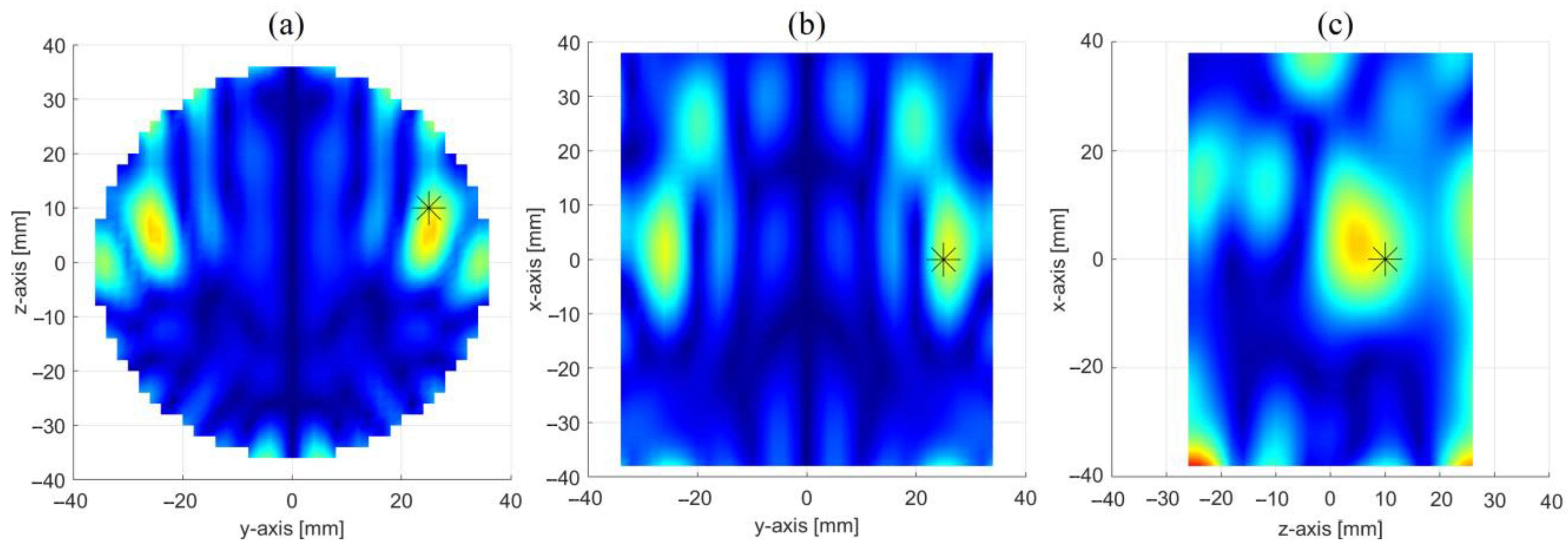
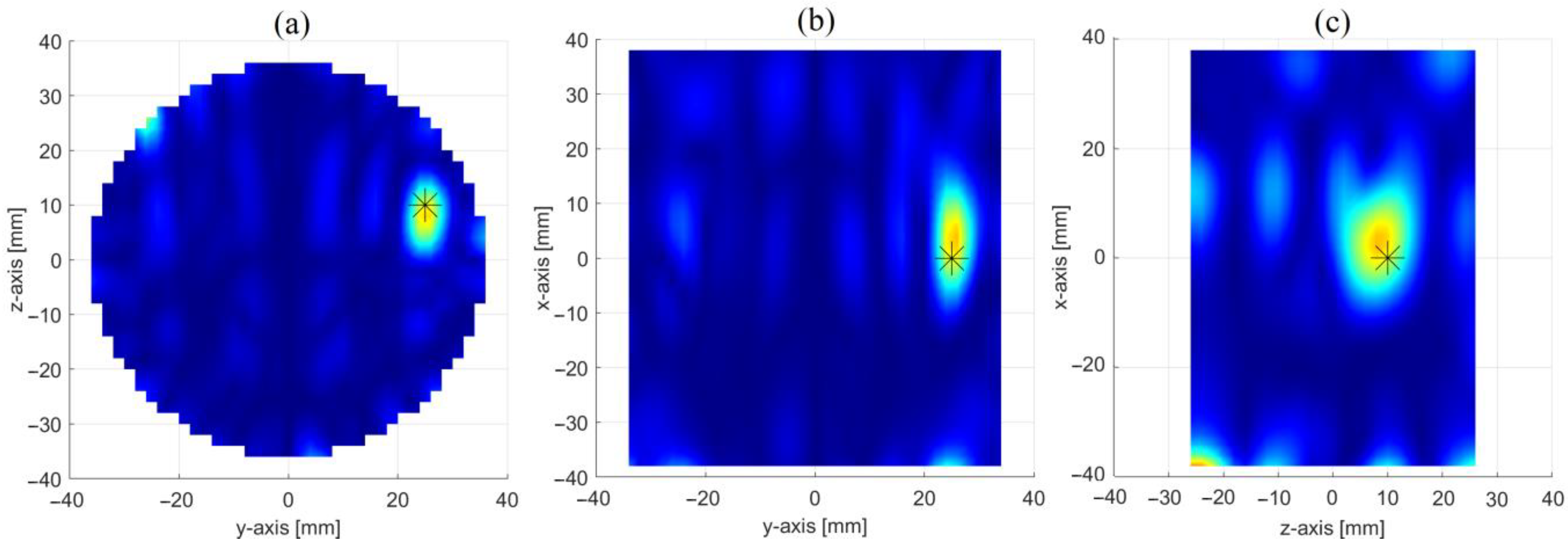
Figure 6 shows the achieved reconstruction in three orthogonal cut planes crossing the center of the inclusion. From panel (a) one can clearly note the presence of two main spots: a first one, at the same position of the inclusion, representing the inclusion itself, and a second one, perfectly specular to the former with respect to the xz-plane, which is the “ghost” arising from the symmetrization introduced by the PSP-based approach (see
Section 2.2.1 and
Appendix A). As already stressed in
Section 2.2.1 and
Section 2.2.2, this ambiguity can be settled by exploiting other symmetries of the OUT and radiating system, such as the one with respect to the xy-plane, exploited by the OSP-based approach. This will be shown in
Section 3.3.
Apart from the presence of the ghost, a satisfactory reconstruction is obtained, with the inclusion better localized in the yz (i.e., the horizontal) cut plane than the other two (i.e., the vertical ones). This is an expected result and is due to the different positions, z
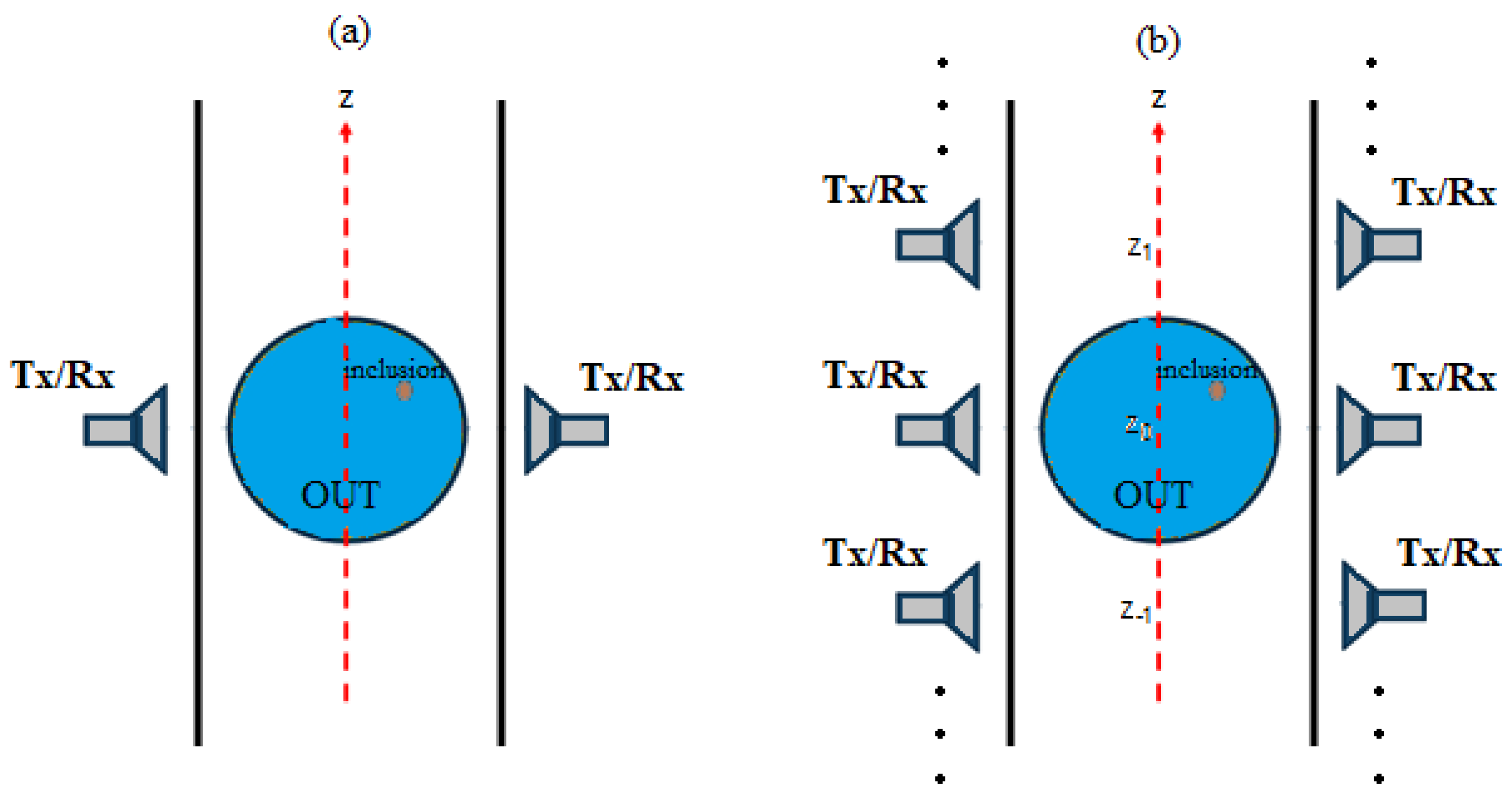
n, at which the OUT is probed when moving along the production line (represented in the set-up by the
z-axis). Indeed, as pointed out in
Section 2.1, while we have only one couple of antennas, the movement along the
z-axis allows for creating a synthetic array of N virtual couples of antennas along the
z-axis, which increases the spatial diversity, hence the resolution, along such axis.
The above results refer to a glass inclusion of 8 mm in size. The smallest size of the inclusion that can be effectively revealed depends on several factors. One of them is the measurement noise, here assumed with a level of 65 dB below the level of the signal feeding each antenna. Since the level of the signal scattered by the inclusion, i.e., the collected differential data, decreases as the third power of the size, this implies that an inclusion smaller than the one considered in this study can be revealed by lowering the noise level. For instance, it is expected that an inclusion of 4 mm in size (half of the size considered above) can be detected if the noise level does not exceed −83 dB, which is a very low value, but not prohibitive for the measurement instruments commercially available. However, it must be noted that other factors influence the detection capability of the system and so the minimum size of the detectable inclusion. The material of the inclusion (glass, plastic, metal, wood and so forth), namely its electric contrast with respect to the food, is one of them. The higher the contrast, the smaller the size of the inclusion that can be detected. A further factor is the antenna return loss, that in this study is below −18 dB over the entire analyzed frequency band. A lower return loss ensures a higher radiated power, hence a higher level of the signal scattered by the inclusion, and so a higher signal to noise ratio for a given inclusion size. In any case, we retain that an inclusion of 4 mm in size can be confidently revealed as, on the other hand, it is shown by the experimental results reported in [
10,
17].
In conclusion, it is worth noting that the implementation of such an approach, in addition to requiring two almost identical antennas, requires a perfect alignment of the two in order to ensure a perfect symmetry of the radiating system with respect to the xz-plane.
3.2. Results-Relative to the OSP-Based Approach
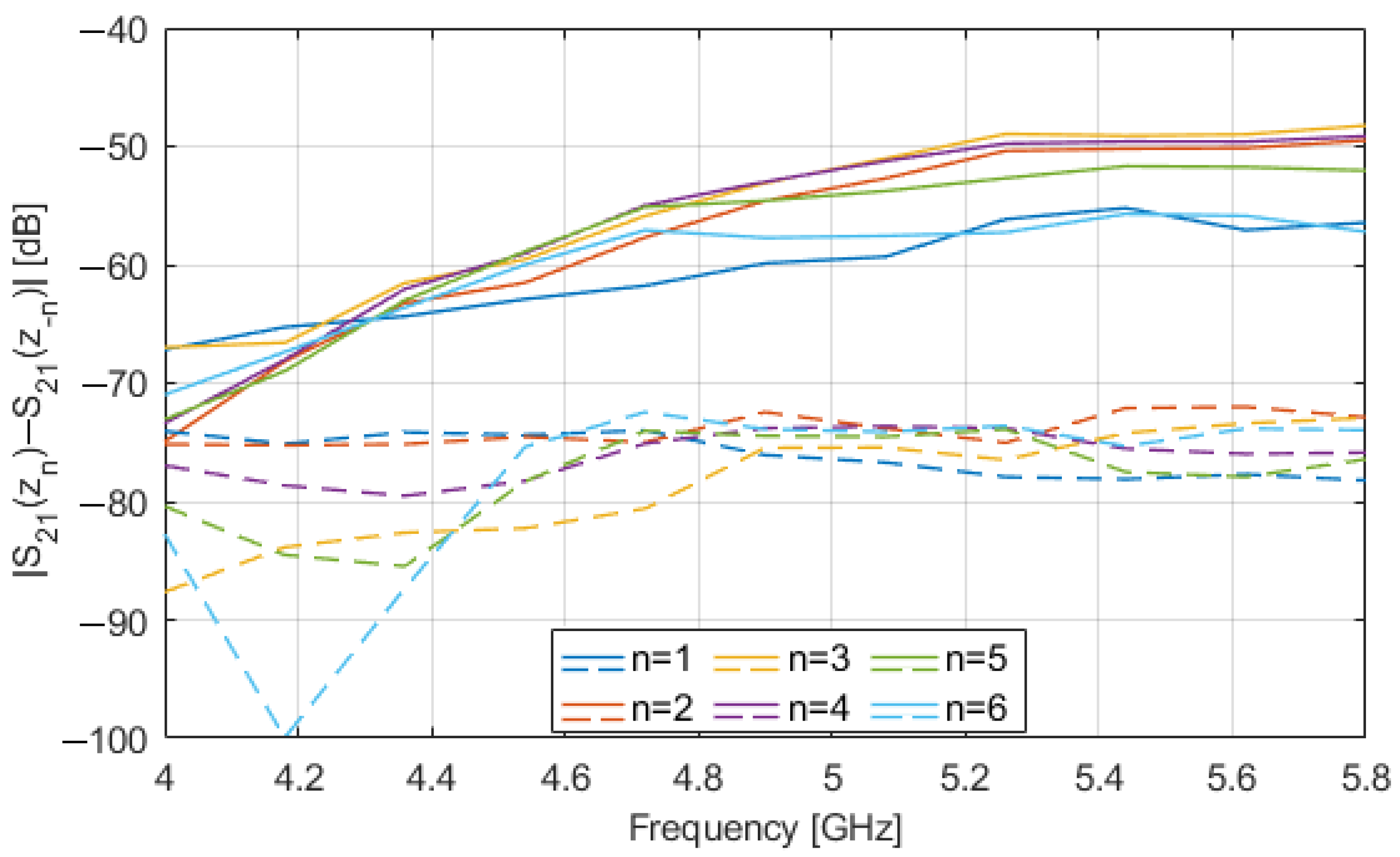
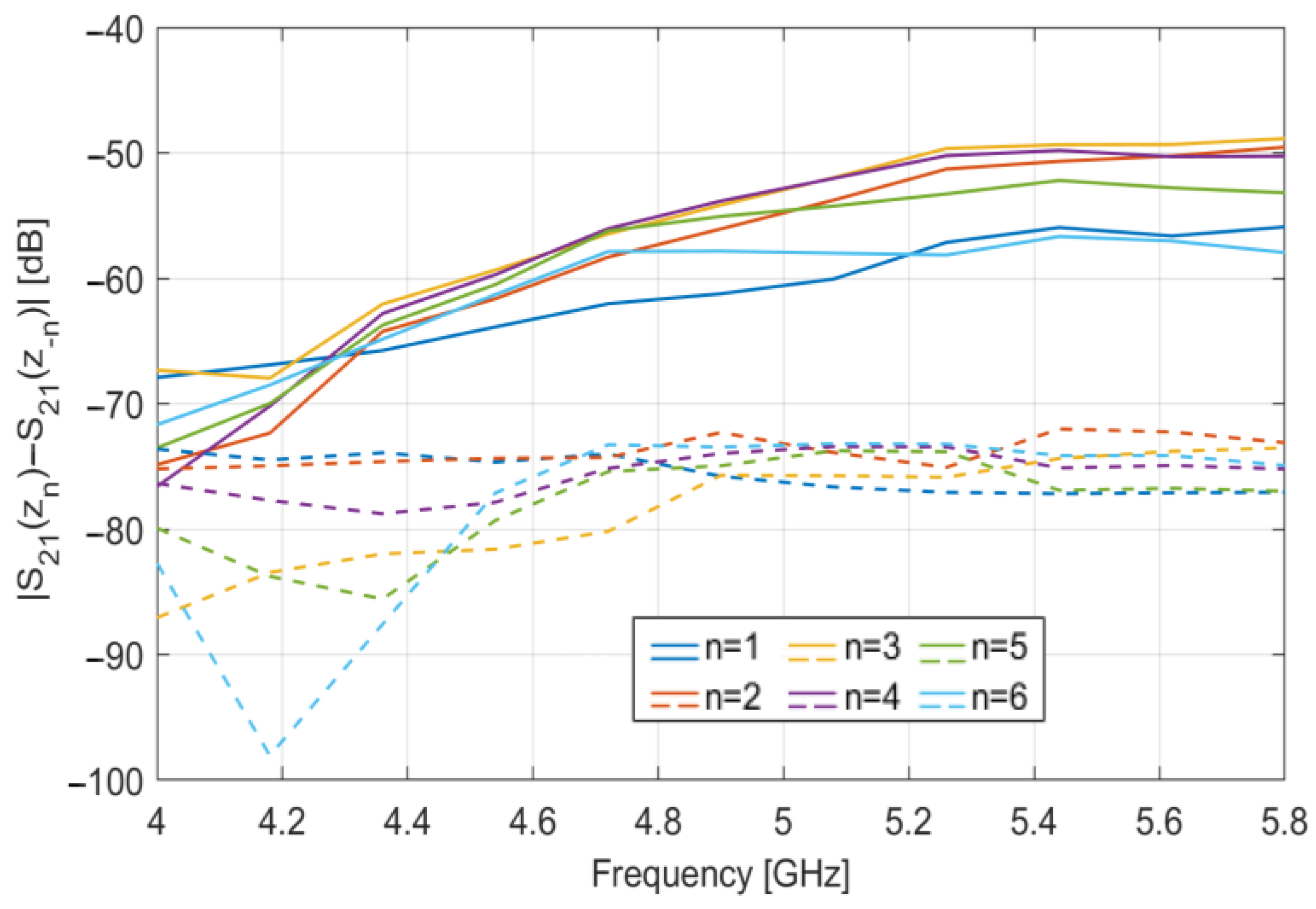
Figure 7 shows the magnitude (in dB) vs. frequency of S
21(z
n) − S
21(z
−n), for z
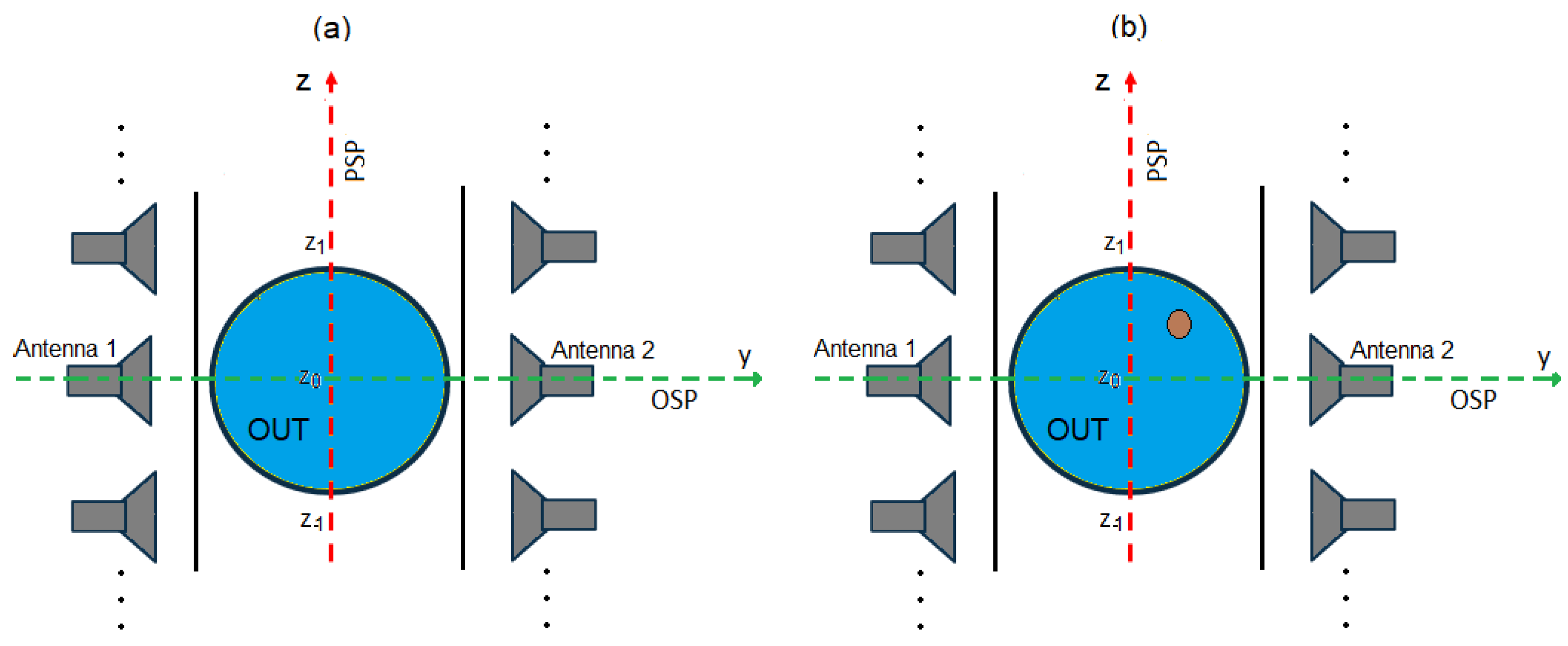
n = 1 ÷ 6 cm, with (solid lines) and without (dashed lines) the glass inclusion in the OUT. The values of the difference obtained in presence of the inclusion are appreciably larger than those without it. Again, this result is due to the presence of the glass inclusion, which, in this case, destroys the symmetry of the OUT (and of the MWI system) with respect to the xy-plane, thus leading to a difference in the transmission parameters measured at the two mirror positions, z
n and z
−n, assumed by the OUT in moving along the
z-axis. The same trend is observed for |S
11(z
n) − S
11(z
−n)| and |S
22(z
n) − S
22(z
−n)| but not reported for the sake of brevity.
These differential data can be then exploited to detect the presence of the inclusion and possibly to image it by means of the linear inversion algorithm described in
Section 2.4. Again, the effect of the measurement noise was considered by adding to the data a white Gaussian noise with a level of −65 dB.
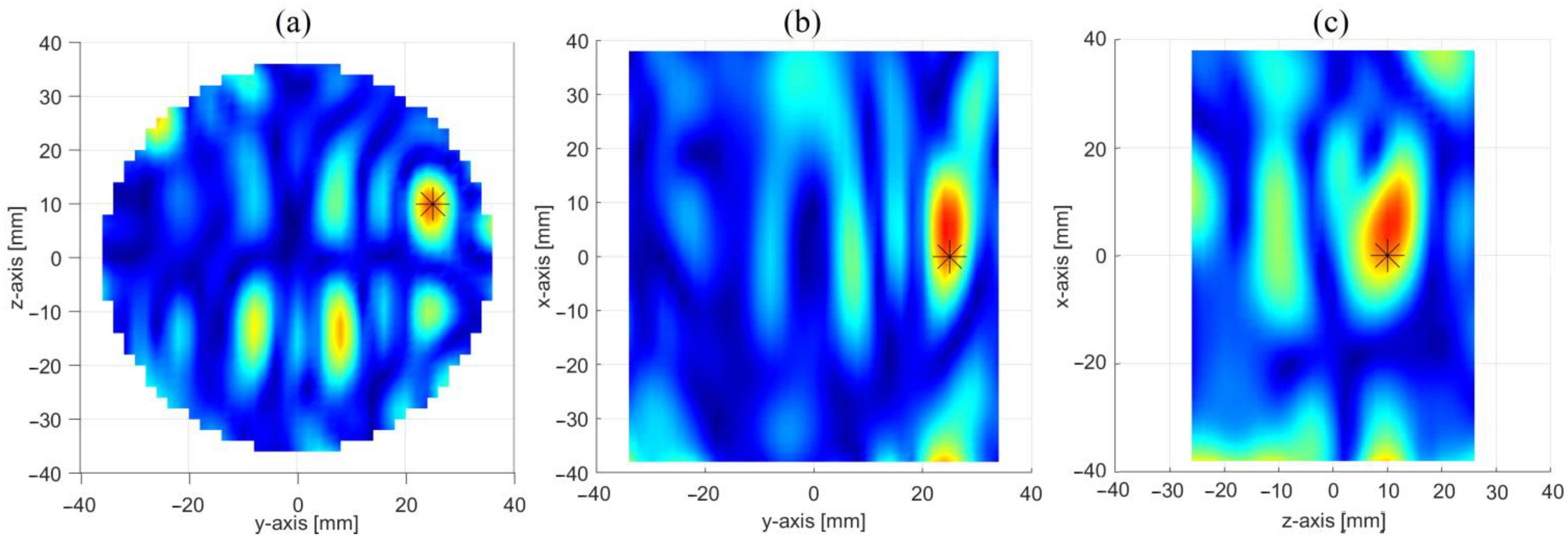
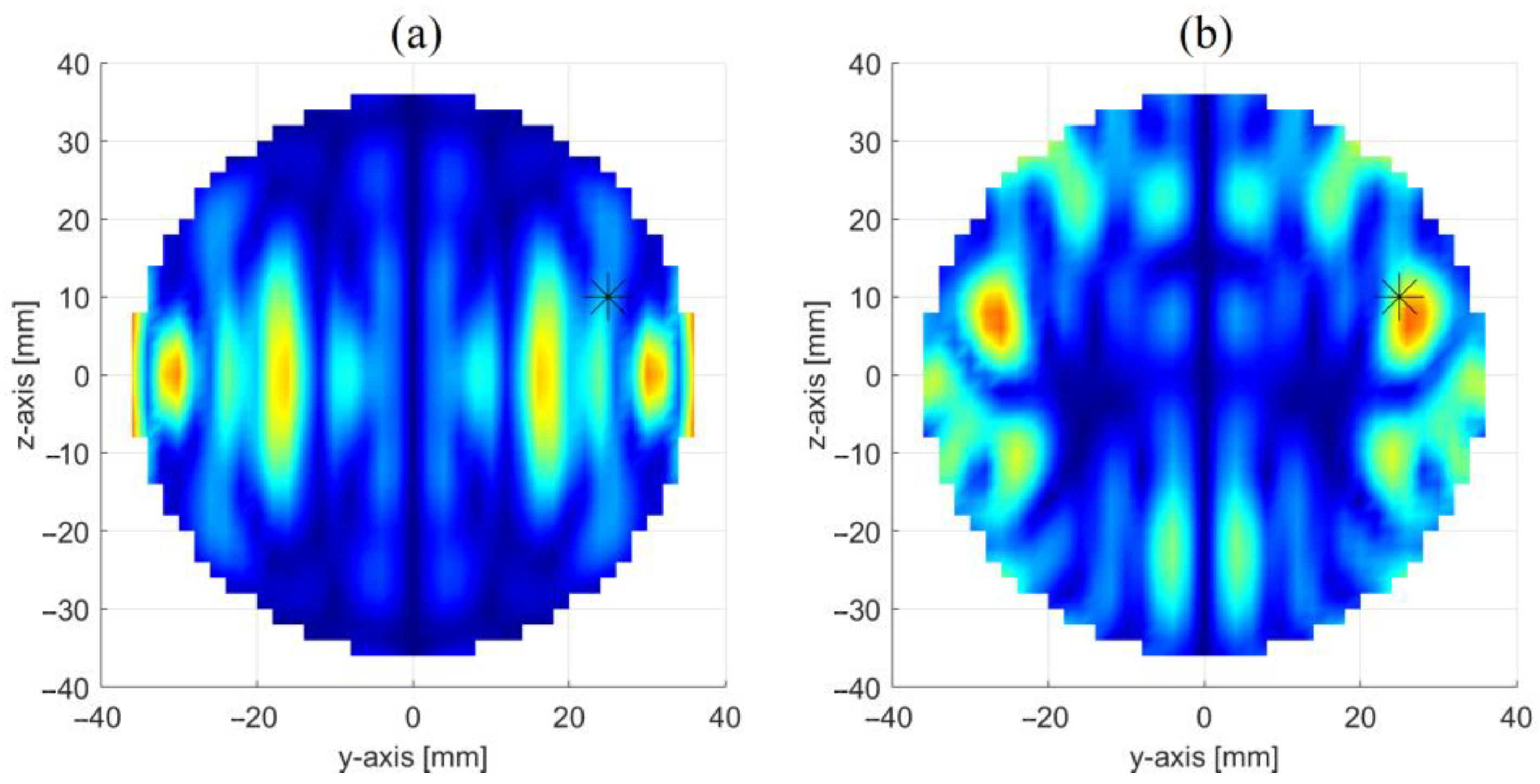
Figure 8 shows the achieved reconstruction in three orthogonal cut planes crossing the center of the inclusion. Similar to the PSP-based approach, from panel (a) one can note the presence of a two sets of spots: a first one, on the top part of the image, i.e., the most intense one, which represents the inclusion (the other spots are artefacts due to the inversion procedure); and a second one, specular to the former, with respect to the xy-plane, which arises from the symmetrization introduced by the OSP-based approach. As it will be shown in the next section, this ambiguity can be settled by properly combining the maps in
Figure 6 and
Figure 8.
In this case as well, leaving aside the ghost, a good reconstruction is obtained, with the inclusion better localized in the yz (i.e., the horizontal) cut plane than the other two (i.e., the vertical ones). Of course, this approach fails when the inclusion lies on the xy-plane (i.e., on OSP), as in this case the symmetry is preserved even in presence of it. However, this drawback can be alleviated by exploiting together the PSP and OSP-based approaches.
In conclusion, it must be stressed that the implementation of such an approach, in addition to requiring almost identical antennas and a perfect aligning of them, requires a perfect synchronization between the acquisition system and the movement of the OUT in order to acquire the scattering parameters exactly at the mirror positions, z
−n and z
n, along the
z-axis. In any case, the knowledge of the displacement is still required to perform the imaging as this information is needed to evaluate the right Green’s functions to be employed in the inversion algorithm (see
Section 2.4).
3.3. Results Combining the PSP and OSP Based Approaches and Robustness Analysis
As already pointed out, while the PSP and the OSP based approaches can work individually, their combination can be fruitfully exploited to prevent the onset of “ghosts”, hence the ambiguity, due to symmetrization, as well as to reduce the failure of the approaches when the inclusion lies on the respective symmetry planes.
Figure 9 shows the reconstruction obtained by combining the maps in
Figure 6 and
Figure 8. Specifically, the resulting map is the point-by-point product of the two maps obtained separately through the PSP and OSP based approaches. As foreseen, the ghosts are strongly attenuated, thus making the imaging of the inclusion no longer ambiguous.
Moreover, the failure region is restricted to the only central region of the OUT, namely to the points along the x-axis (intersection of PSP and OSP).
Finally, the robustness of both the PSP and OSP based approaches was assessed when the OUT was not perfectly in the middle between the two antennas, but it was slightly displaced toward one of them. Specifically, a displacement along the y axis of d = 5 mm from the middle was considered.
Regarding the PSP-based approach,
Figure 10 shows |S
11 − S
22| (in dB) vs. frequency simulated in presence of the glass inclusion in the OUT. As it can be seen, the difference is much larger than the difference observed in the case of the perfectly centered OUT (see
Figure 5), thus indicating that such a difference is mainly due to the displacement rather than the presence of the inclusion. This means that it is sufficient, a small displacement of the OUT from the center, to determine a completely loss of symmetry and so the failure of the PSP-based approach. This is confirmed by the map in
Figure 11a representing the reconstructions obtained by processing the data in
Figure 10. As it can be seen, the inclusion is completely undistinguishable, thus indicating that the effect of the displacement completely masks its presence.
However, the effect of possible displacement of the OUT from the center of the conveyor belt can be compensated by properly “calibrating” the measured S
11 and S
22. Denoted with S
11,0 and S
22,0, the reflection coefficients simulated for an OUT free of inclusions and perfectly centered between the two antennas, and with S
11,d and S
22,d the reflection coefficients simulated for the same OUT displaced of
d along the
y-axis, the calibration consists in rescaling the measured S
11 and S
22 as follow:
The imaging is then performed by processing the calibrated differential data rather than to S11 − S22 (the data are still corrupted by an additive white Gaussian noise with a level of −65 dB).
Figure 11b shows the achieved reconstruction by means of the PSP-normalized approach. As it can be seen, apart from the ghost, the presence of the inclusion is again well distinguishable. Of course, the challenging aspect of such a calibration procedure is to know the exact displacement,
d, of the OUT with respect to the antennas (this can be achieved, for instance, by exploiting the THz scanner/module proposed in [
18]). Alternatively, in the absence of such information, one can determine S
11,d and S
22,d for a proper set of values of
d and choose the couple (S
11,d, S
22,d), to be used in the calibration procedure in (5), such to minimize the root mean square error of
.
Another challenging aspect is to have a quite accurate numerical modeling of the OUT and of the system in order to accurately simulate Sii,0 and Sii,d (i = 1, 2). In absence of this, one could physically measure (at the moment the system is deployed) Sii,0 and Sii,d (i = 1, 2) for a reference object, for different d, and store the data for the subsequent calibration.
As for the OSP-based approach,
Figure 12 shows |S
21(z
n) − S
21(z
−n)| (in dB) vs. frequency simulated in presence (solid lines) and in absence (dashed lines) of the glass inclusion in the OUT. As it can be seen, in this case, a remarkable difference is still observed only when the inclusion is present, while it is practically zero in absence of it. Same behavior is observed for |S
11(z
n) − S
11(z
−n)| and |S
22(z
n) − S
22(z
−n)| but not reported for the sake of brevity. This confirms that, unlike the PSP-based approach, the detection capability of the OSP-based approach is not impaired by not perfectly centering OUT with respect to the two antennas. Therefore, at least when only the detection of the inclusion is of interest, the OSP-based approach is more robust than the PSP-based approach, as it does not require knowing possible displacements of the OUT from the middle between the two antennas. Therefore, it can be employed as a stand-alone approach of detection. Anyway, such information is still needed for the imaging, even if in this case we do not need to calibrate the data through (5), but the displacement must be taken into account solely in the computation of the Green’s matrixes in (4).
Finally, let us note that a similar analysis should be carried out by assuming not perfectly symmetric antennas. However, the effect of such asymmetry on the performances of the two approaches is analogous to that produced by a not perfect centering of the OUT between the two antennas, so that the above outcomes can be directly applied to this case.
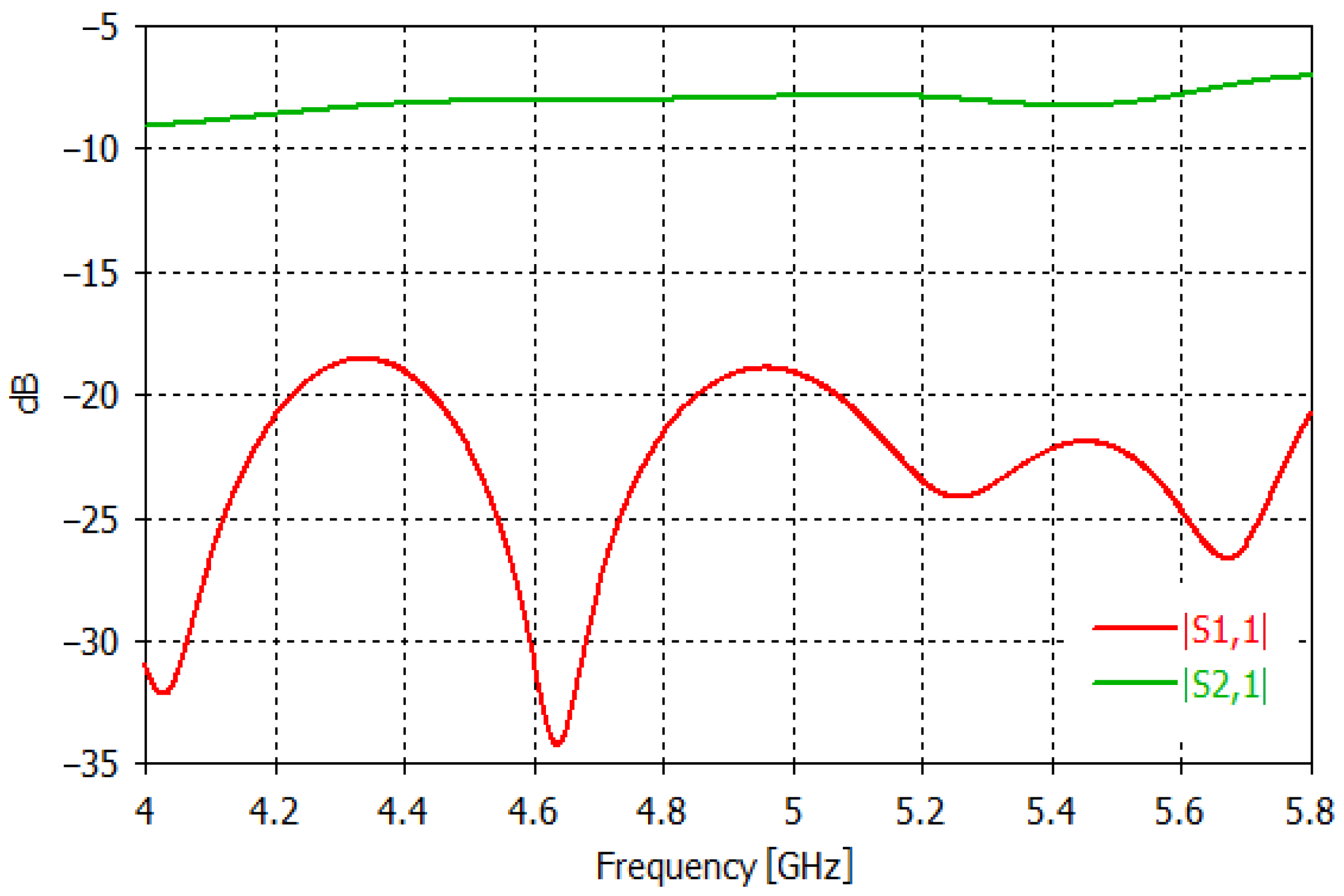
In addition, let us note that a possible asymmetry in the behavior of the two antennas mainly arises from a not perfect symmetry of the elements connecting the antennas to the measurement instrument, such as adapters (e.g., microstrip to coaxial), tin welds and so on. Indeed, while the geometry/layout is almost the same for both antennas (thanks to the high mechanical tolerances of manufacturing, of the order of few tens of micron), the connection components, especially the tin welds, can be significantly different. However, in this study, not printed antennas (hence, without tin welds) were considered, which allows for minimizing this source of asymmetry. In any case, it is worth mentioning that possible residual asymmetries in the antennas’ behavior can be characterized and compensated or treated as a further source of noise, with the effect of increasing the level of the threshold above which the level of the differential data must be located to establish the presence of the inclusion. For instance, by indicatively assuming an (average) antenna return loss of approximately −25 dB, over the analyzed band (see
Figure 4), and a discrepancy in the antenna behavior of approximately 3%, this corresponds to a difference between S
11 and S
22 without inclusion, of approximately −55 dB, which is larger than the considered noise level (−65 dB) but comparable to the level of the signal scattered by the considered inclusion (see
Figure 5).
As final remark, let us note that, as happens in the case of a not perfect centering of the OUT between the two antennas, asymmetries in the antenna behavior only affects the performance of the PSP-based approach but not that of the OSP-based approach.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












