


Fault Identification and Localization of a Time−Frequency Domain Joint Impedance Spectrum of Cables Based on Deep Belief Networks

Abstract
:1. Introduction
2. Fault Cable Impedance Spectrum Identification and Location Principle
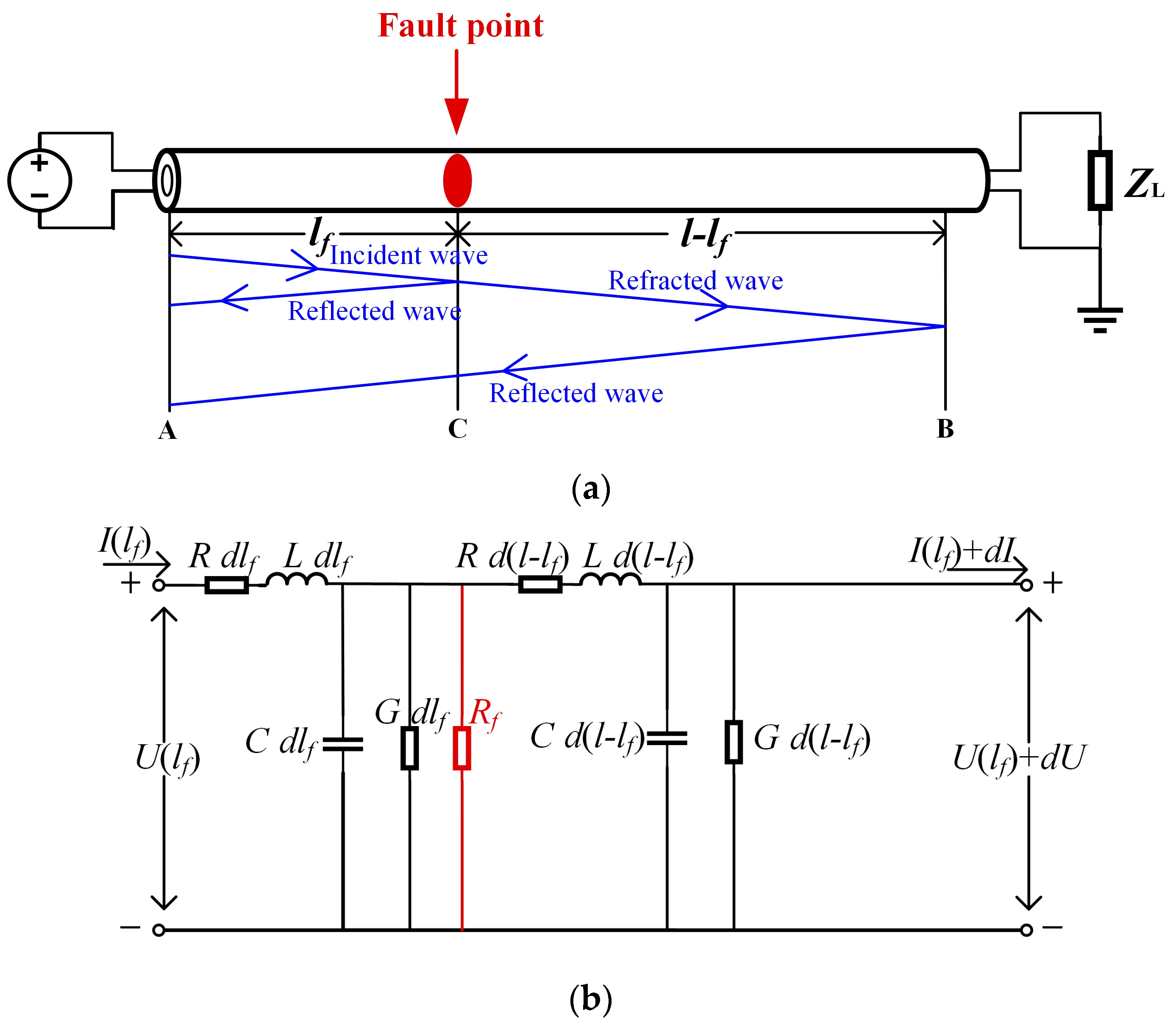
2.1. Fault Cable Distribution Parameter Equivalent Circuit
2.2. Cable Impedance Spectrum Fault Identification Principle
2.3. Cable Time–Frequency Domain Impedance Spectrum Fault Location Principle
3. Establish Sample Database
3.1. Collection of Sample Data
3.2. Sample Database Generation for Fault Type Identification and Localization
4. A Deep Belief Network−Based Model for Cable Fault Type Identification and Location
4.1. Principle of the Deep Belief Network
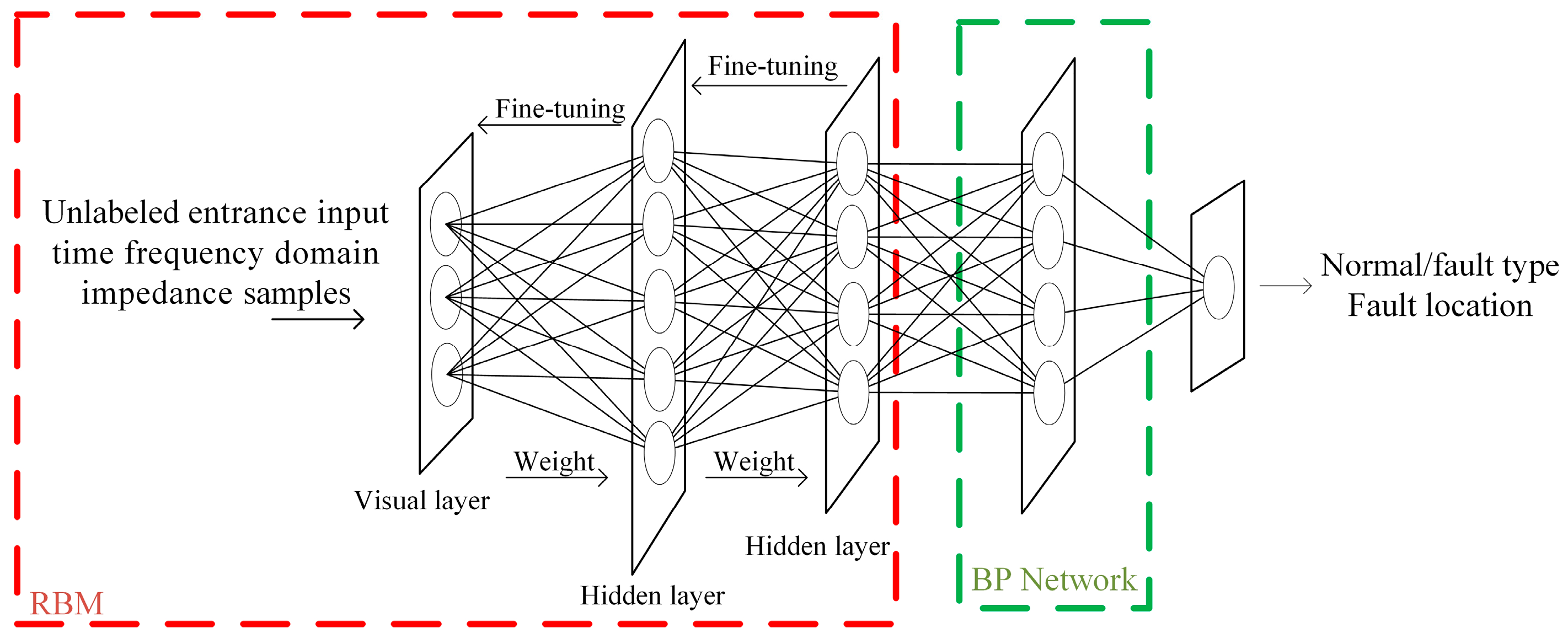
4.2. Structure and Training Process of the Deep Belief Network
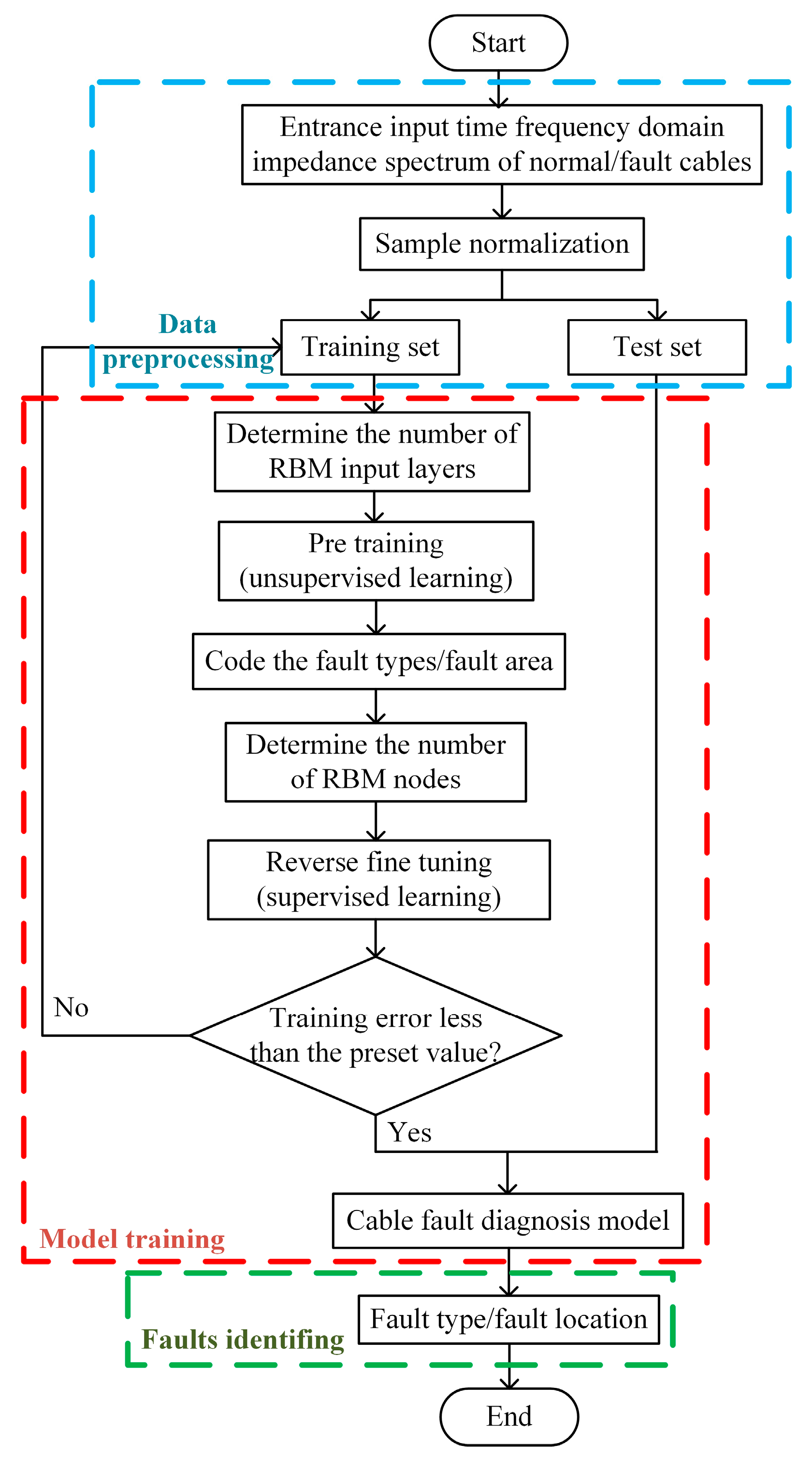
4.3. Process of DBN−Based Cable Fault Diagnosis
- Step 1
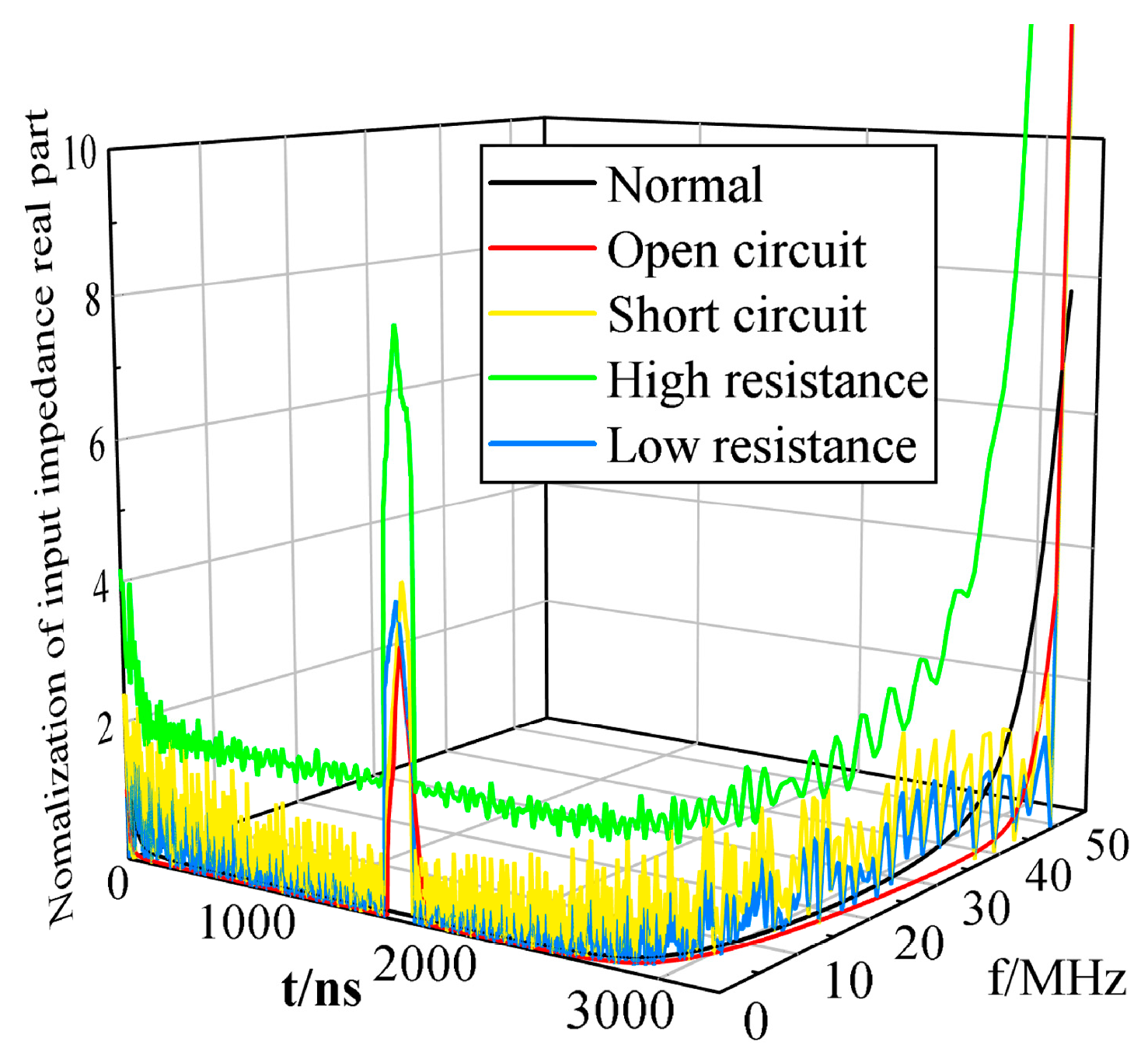
- The headend input impedance amplitude and phase of the normal operation and faulty cables are extracted as the original sample database Z of the fault identification model, and the real part of the faulty cable’s headend input impedance time–frequency domain is extracted as the original sample database R of the fault location model.
- Step 2
- Data pre−processing of fault samples, including normalizing the samples and dividing them into a training set and test set according at a 4:1 ratio.
- Step 3
- Building a DBN−based cable fault type identification and localization model, the unlabeled training sample set is input to the RBM containing three hidden layers for unsupervised learning.
- Step 4
- Add softmax classifier, encode the fault type and fault location, and set the number of nodes in the output layer to 10.
- Step 5
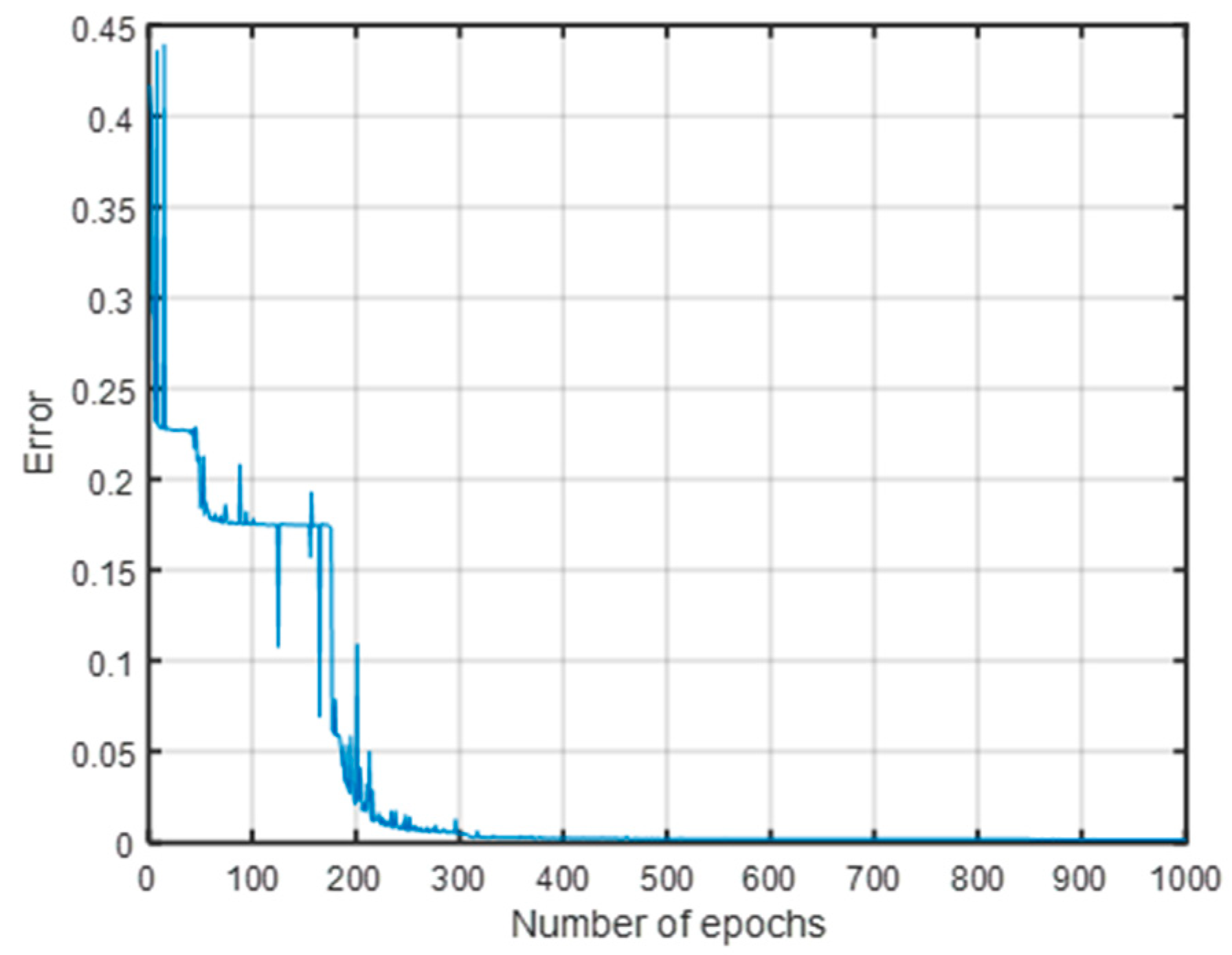
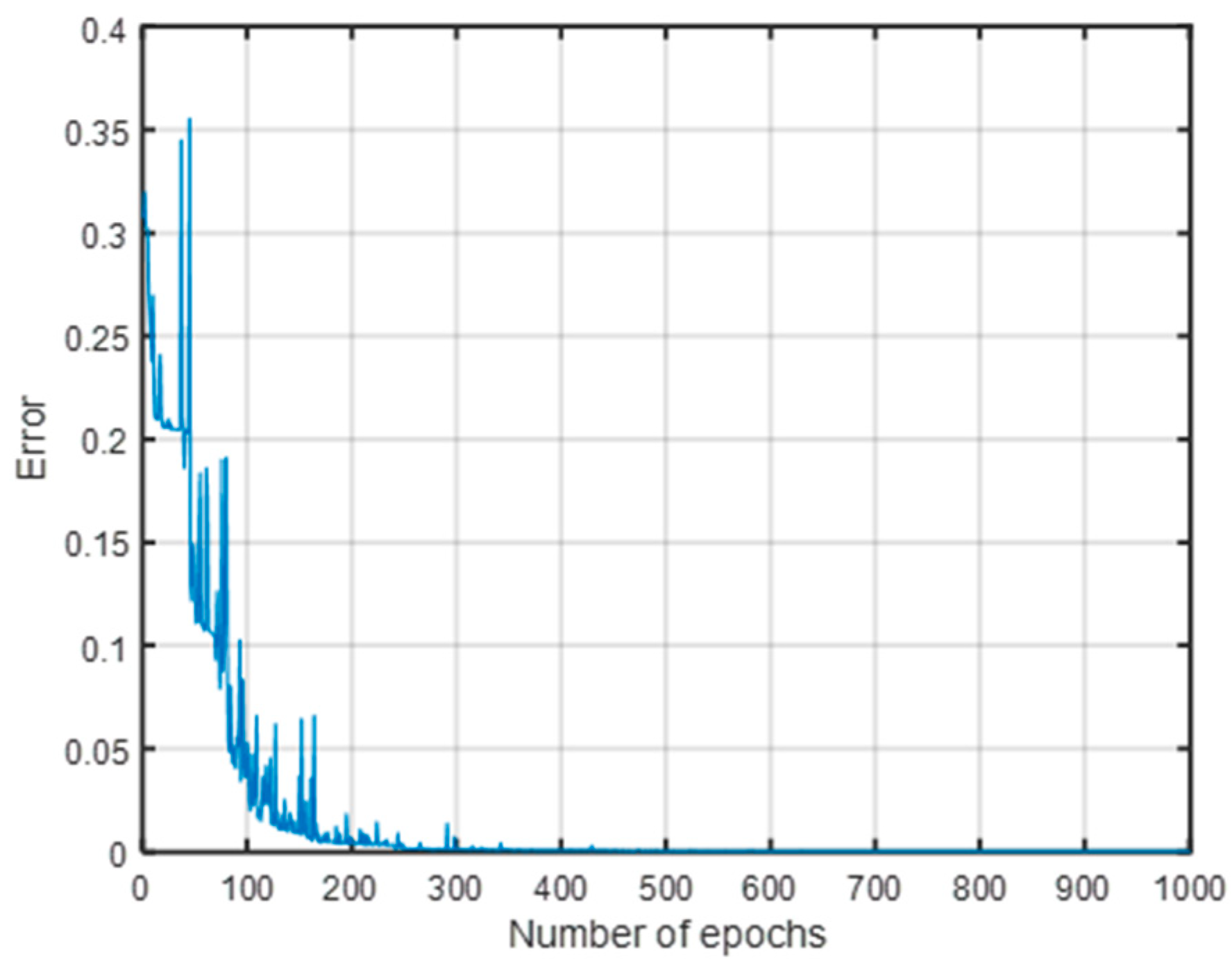
- Inverse fine−tuning of the model; using the labeled samples, the pre−trained cable fault diagnosis feature parameters are subjected to supervised inverse fine−tuning using a BP neural network, which makes the fault diagnosis network’s performance converge to the global optimum, and the root−mean−square error (RMSE) is used as the training error to evaluate the network performance, the expression of which is as follows:where Zipre and Zitrue are the predicted and actual faults under the ith fault condition in the BP neural network, respectively, and N denotes the total number of samples. The end conditions of the inverse fine−tuning are set as follows: the RMSE is less than the preset value of 0.01, and the number of iterations reaches the set 1000. The smaller the training error, the better the fit of the DBN model to the training sample set.
- Step 6
- Test model—the test sample set is input to the DBN model for fault prediction, and the prediction results are compared with the actual fault conditions to evaluate the performance of the two DBN models trained.
5. Simulation of DBN−Based Cable Fault Identification and Location
5.1. Construction of Cable Fault Model
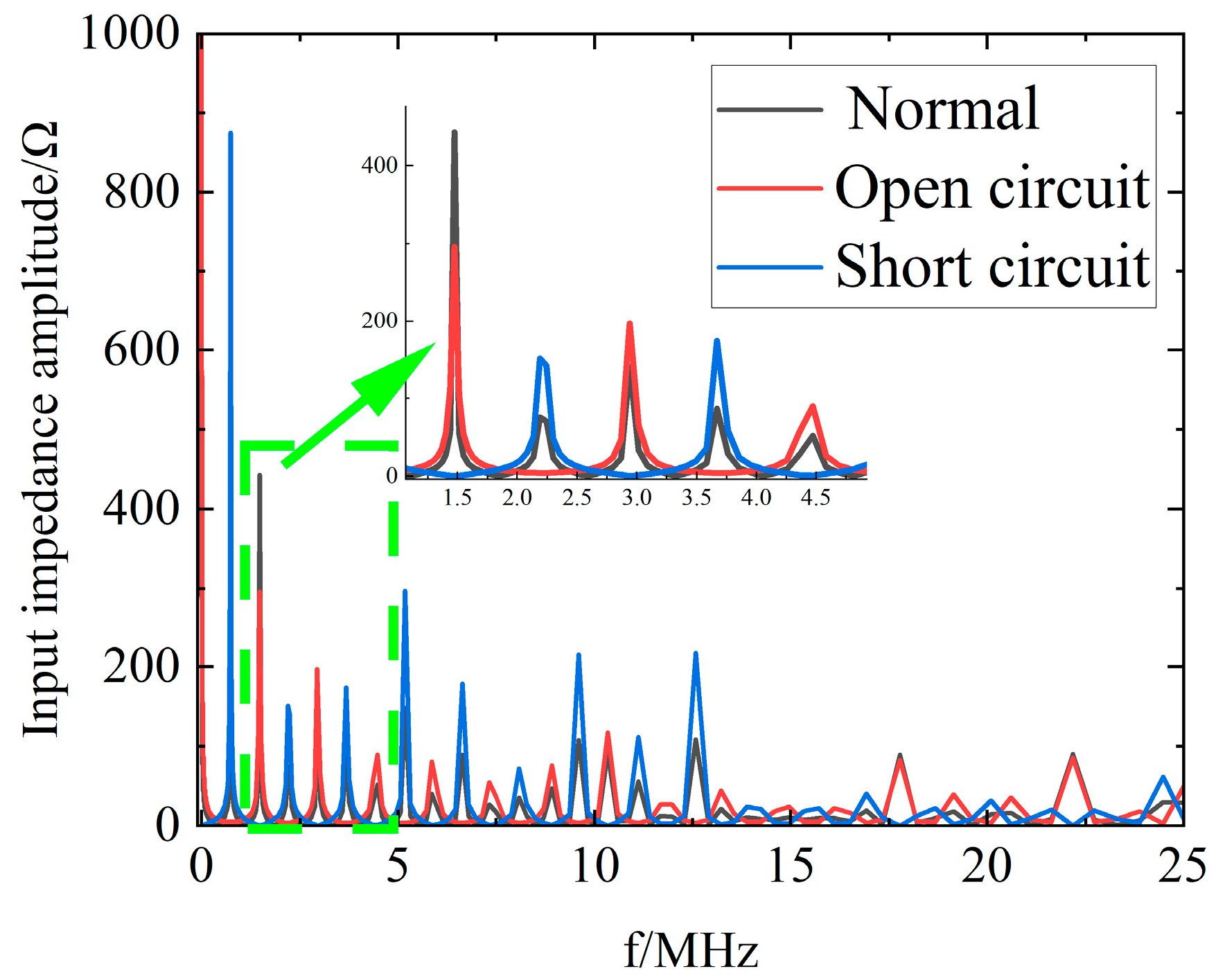
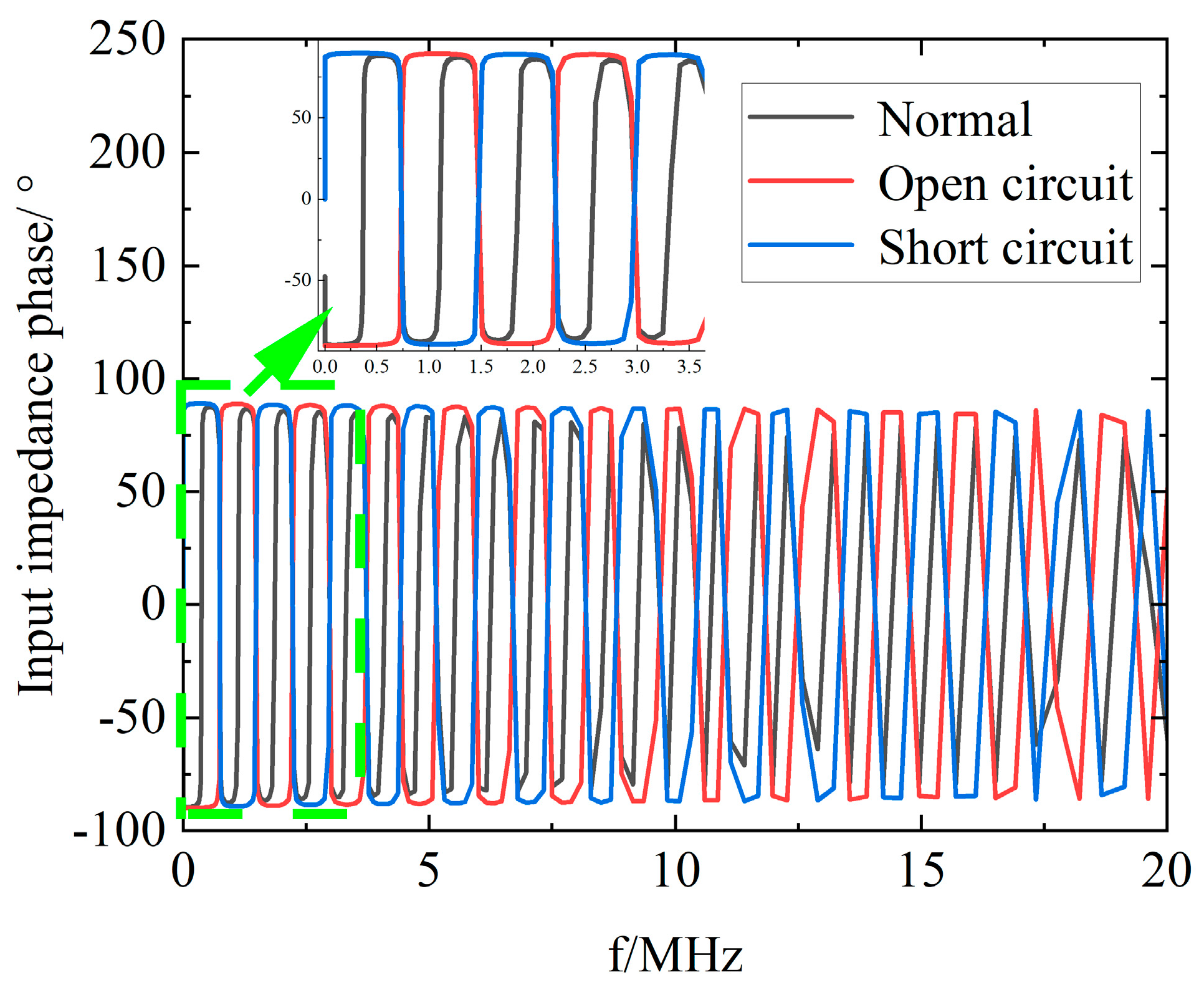
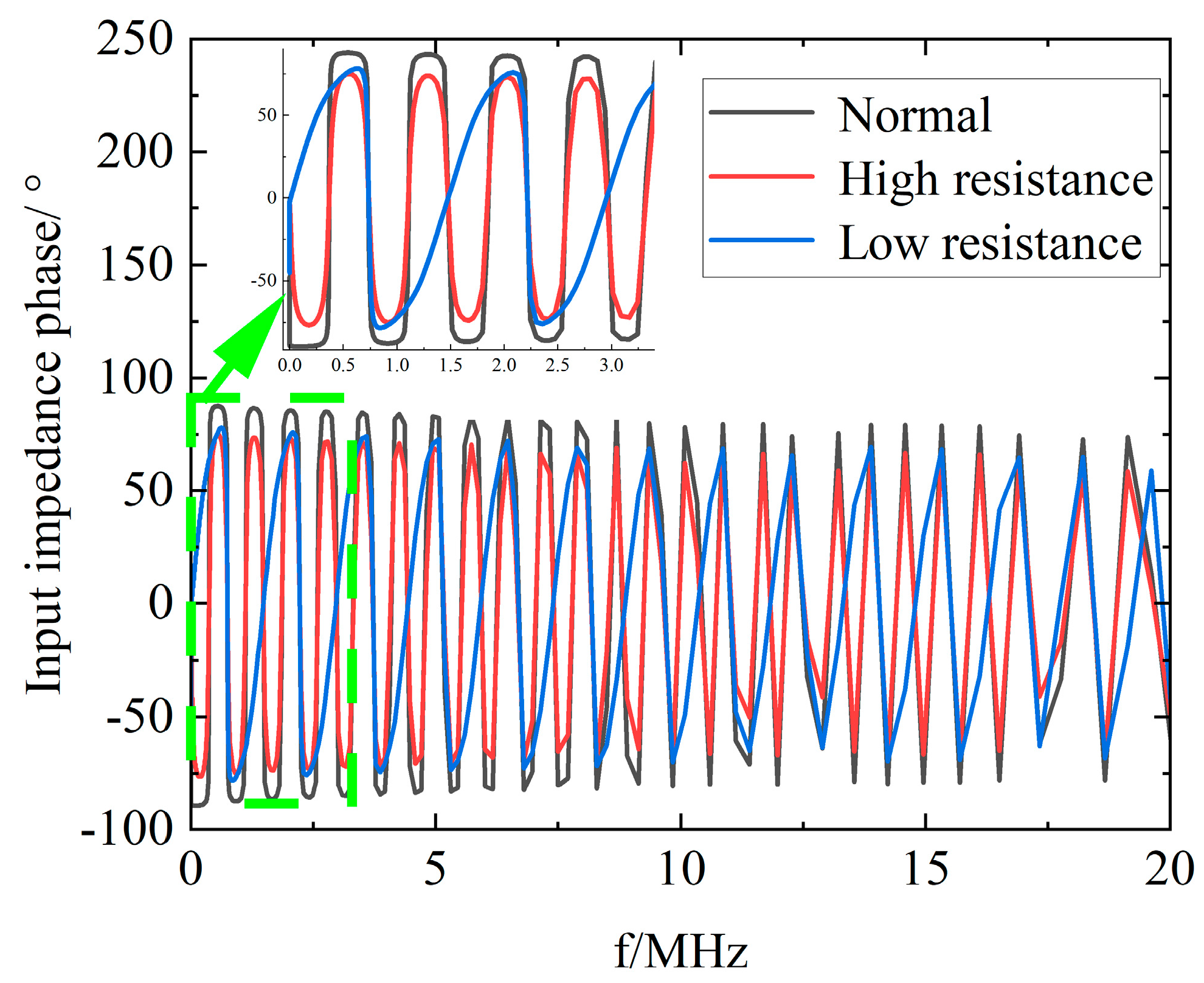
5.2. Comparison of the Headend Input Impedance Spectrum of Normal and Faulty Cables
5.3. Location of Cable Faults
5.4. Simulation Analysis
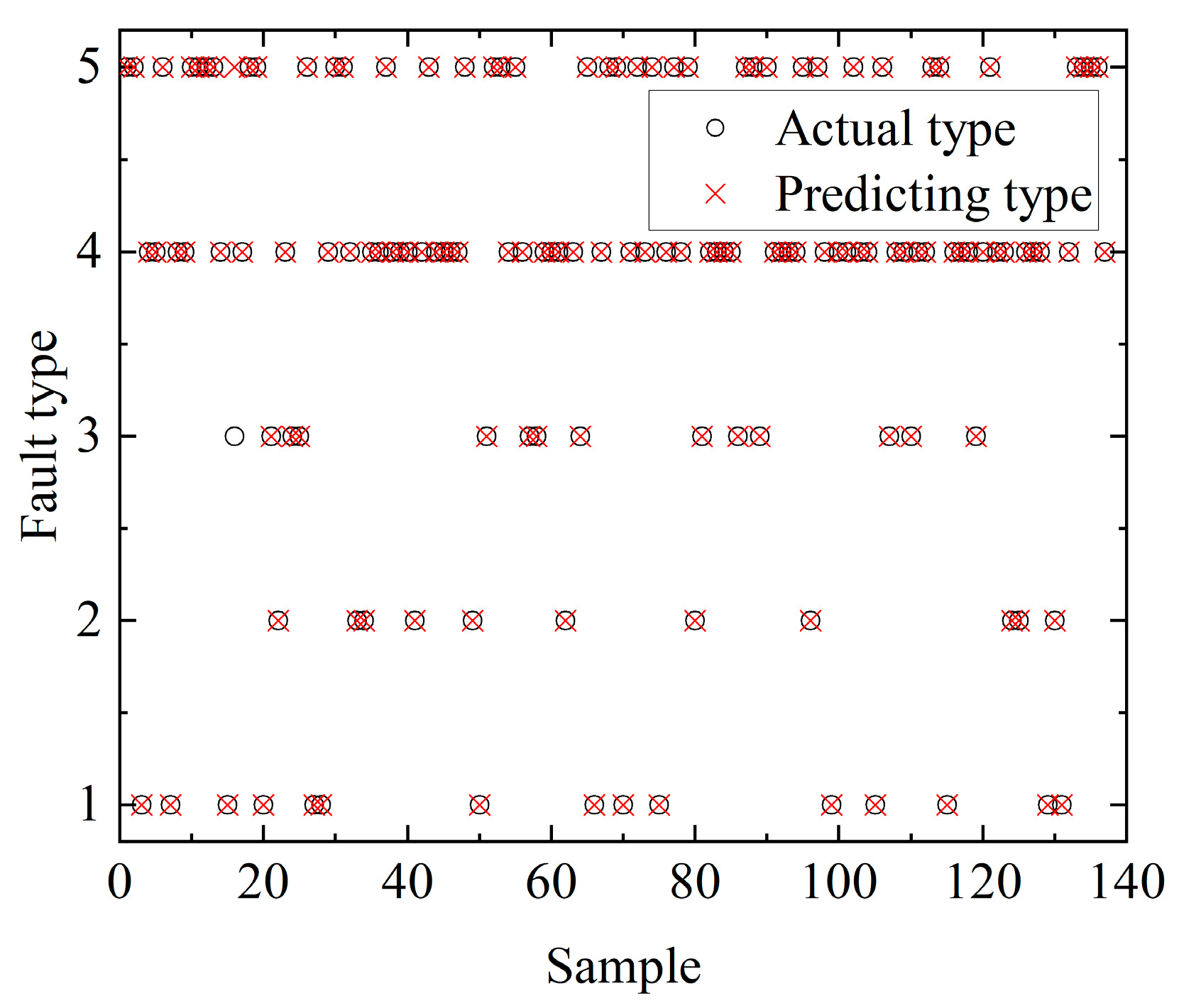
5.5. DBN Model Fault Diagnosis Result Analysis
5.6. Comparative Analysis
6. Conclusions
- (1)
- By modeling different types of cable operation with IFFT transformation, the headend input time–frequency domain impedance spectrum of the normal operation and different faulty cables were obtained as the original input samples of the DBN, and the performance of the model was analyzed by the fault type identification results of the DBN network and its localization results.
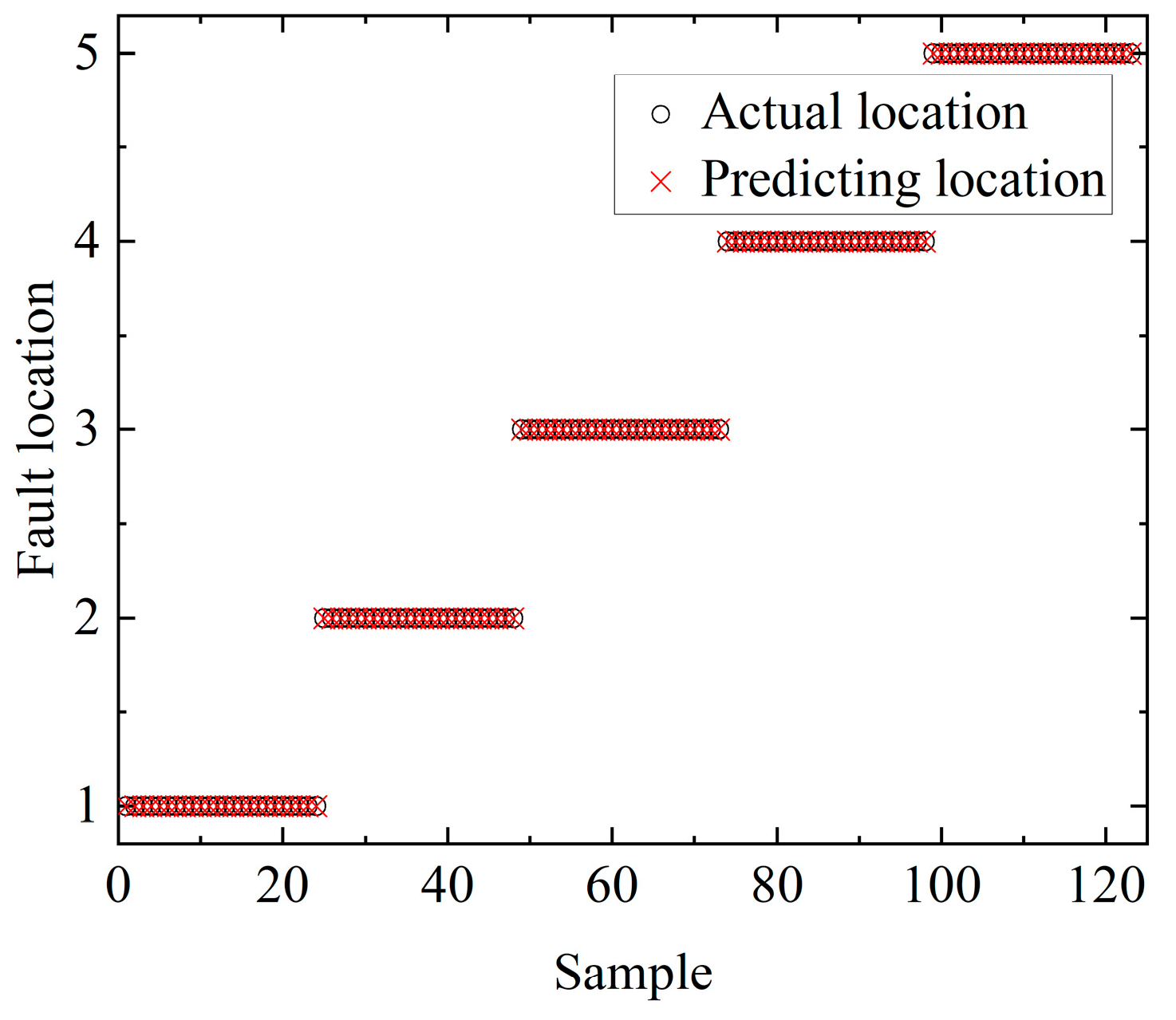
- (2)
- The simulation results showed that the DBN−based cable fault type identification and location method could maintain the original characteristics of the data in the process of data dimensionality reduction, and the fault identification and location results were unaffected by the fault location, transition ground resistance, and other factors. The fault identification and location accuracies reached 99.27% and 100%, respectively.
- (3)
- The method was able to effectively identify the type of cable fault and locate the fault points, which could be extended to practical applications for smart grids.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yanwen, W.; Chen, P.; Sun, Y.; Feng, C. A Comprehensive Operation Status Evaluation Method for Mining XLPE Cables. Sensors 2022, 22, 7174. [Google Scholar]
- Li, M.; Bu, J.; Song, Y.; Pu, Z.; Wang, Y.; Xie, C. A Novel Fault Location Method for Power Cables Based on an Unsupervised Learning Algorithm. Energies 2021, 14, 1164. [Google Scholar] [CrossRef]
- Heonkook, K.; Lee, H.; Kim, S.W. Current Only-Based Fault Diagnosis Method for Industrial Robot Control Cables. Sensors 2022, 22, 1917. [Google Scholar]
- Miyazaki, Y.; Hirai, N.; Ohki, Y. Effects of Heat and Gamma-rays on Mechanical and Dielectric Properties of Cross-linked Polyethylene. IEEE Trans. Dielectr. Electr. Insul. 2006, 27, 1998–2006. [Google Scholar] [CrossRef]
- Song, E.; Shin, Y.J.; Stone, P.E.; Wang, J.; Choe, T.S.; Yook, J.G.; Park, J.B. Detection and Location of Multiple Wiring Faults via Time–Frequency-Domain Reflectometry. IEEE Trans. Electromagn. Compat. 2009, 51, 131–138. [Google Scholar] [CrossRef]
- Jin, C.S.; Ku, L.C.; Chun-Kwon, L.; Jin, H.Y.; Kang, J.M.; Bae, P.J.; Yong-June, S. Condition Monitoring of Instrumentation Cable Splices Using Kalman Filtering. IEEE Trans. Instrum. Meas. 2015, 64, 3490–3499. [Google Scholar]
- Saleh, M.U.; Deline, C.; Benoit, E.; Kingston, S.; Edun, A.S.; Jayakumar, N.K.T.; Harley, J.B.; Furse, C.; Scarpulla, M. An Overview of Spread Spectrum Time Domain Reflectometry Responses to Photovoltaic Faults. IEEE J. Photovolt. 2020, 99, 1–8. [Google Scholar] [CrossRef]
- Norouzi, Y.; Braun, S.; Frohne, C.; Seifi, S.; Werle, P. Effect of Cable Joints on Frequency Domain Analysis. In Proceedings of the 2018 IEEE Conference on Electrical Insulation and Dielectric Phenomena (CEIDP), Cancun, Mexico, 21–24 October 2018; pp. 288–292. [Google Scholar]
- Tang, Z.; Zhou, K.; Meng, P.; Li, Y. A Frequency-Domain Location Method for Defects in Cables Based on Power Spectral Density. IEEE Trans. Instrum. Meas. 2022, 71, 9005110. [Google Scholar] [CrossRef]
- Shan, B.; Li, S.; Yu, L.; Wang, W.; Li, C.; Meng, X. Effect of Segmented Thermal Aging on Defect Location Accuracy in XLPE Distribution Cables. IEEE Access 2021, 9, 134753–134761. [Google Scholar] [CrossRef]
- Zhang, H.; Mu, H.; Lu, X.; Tian, J.; Zou, X.; Zhang, G. A method for locating and diagnosing cable abrasion based on broadband impedance spectroscopy. Energy Rep. 2022, 8, 1492–1499. [Google Scholar] [CrossRef]
- Yamada, T.; Hirai, N.; Ohki, Y. Improvement in sensitivity of broadband impedance spectroscopy for locating degradation in cable insulation by ascending the measurement frequency. In Proceedings of the 2012 IEEE International Conference on Condition Monitoring and Diagnosis, Bali, Indonesia, 23–27 September 2012; pp. 677–680. [Google Scholar]
- Ohki, Y.; Yamada, T.; Hirai, N. Precise location of the excessive temperature points in polymer insulated cables. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 2099–2106. [Google Scholar] [CrossRef]
- Pinomaa, A.; Ahola, J.; Kosonen, A.; Ahonen, T. Diagnostics of low-voltage power cables by using broadband impedance spectroscopy. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–10. [Google Scholar]
- Wang, S.; Dehghanian, P. On the Use of Artificial Intelligence for High Impedance Fault Detection and Electrical Safety. IEEE Trans. Ind. Appl. 2020, 56, 7208–7216. [Google Scholar] [CrossRef]
- Liang, Y.L.; Li, K.J.; Ma, Z.; Lee, W.J. Typical Fault Cause Recognition of Single-Phase-to-Ground Fault for Overhead Lines in Nonsolidly Earthed Distribution Networks. IEEE Trans. Ind. Appl. 2020, 56, 6298–6306. [Google Scholar] [CrossRef]
- Chi, P.; Zhang, Z.; Liang, R.; Cheng, C.; Chen, S. A CNN recognition method for early stage of 10 kV single core cable based on sheath current. Electr. Power Syst. Res. 2020, 184, 106292. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, D.; He, J.; Li, M. Local Degradation Diagnosis for Cable Insulation based on Broadband Impedance Spectroscopy. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 2097–2107. [Google Scholar] [CrossRef]
- Lee, H.M.; Lee, G.S.; Kwon, G.Y.; Bang, S.S.; Shin, Y.J. Industrial Applications of Cable Diagnostics and Monitoring Cables via Time–Frequency Domain Reflectometry. IEEE Sens. J. 2021, 21, 1082–1091. [Google Scholar] [CrossRef]
- Yu, A.; Yang, H.; Yao, Q.; Li, Y.; Guo, H.; Peng, T.; Li, H.; Zhang, J. Accurate Fault Location Using Deep Belief Network for Optical Fronthaul Networks in 5G and Beyond. IEEE Access 2019, 7, 77932–77943. [Google Scholar] [CrossRef]
- Ye, X.; Lan, S.; Xiao, S.; Yuan, Y. Single Pole-to-Ground Fault Location Method for MMC-HVDC System Using Wavelet Decomposition and DBN. IEEJ Trans. Electr. Electron. Eng. 2018, 18, 238–267. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Y.; Jiang, X. Pattern Recognition of DC Partial Discharge on XLPE Cable Based on ADAM-DBN. Energies 2020, 13, 4566. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Qin, X.; Zhang, Y.; Mei, W.; Dong, G.; Gao, J.; Wang, P.; Deng, J.; Pan, H. A cable fault recognition method based on a deep belief network. Comput. Electr. Eng. 2018, 71, 452–464. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Open Circuit | Short Circuit | High Resistance | Low Resistance |
|---|---|---|---|---|
| Rf | ∞ | 0 | >10 Z0 | <10 Z0 |
| Operation Conditions | Sample Database | |
|---|---|---|
| Fault Type Identification Sample Z | Fault Location Sample R | |
| Normal | [1701547019,1147256261,…, 26.10192758,−47.60935,…, 53.32] | − |
| [2041856423.2, 1992169260.7,…, 2.38349,−48.20147,…, 71.7711] | ||
| ⁝ | ||
| [1276160264, 926442784.9,…, 29.89945885,−51.12209,…, 49.30311] | ||
| Fault | [134698812.7,34640942.7,…9.611459666, 1.307308543, −90,…, −82.61954] | [0.998035,0.64874,…, 3.11328,…, 3.527929, 46.09701] |
| [0.202491386,114.0169151,…, 0.896704823,66.66257433,0.0058,…, −61.17] | [2.39336,1.58306,…, 4.41899,…, 0.12737,39.5892] | |
| [2871.114899,2665.930828,…, 18.24457638,1.53203625, −44.996,…, 33.94] | [4.16462,3.87678,…, 7.00472,…, 162.04205,314.36995] | |
| ⁝ | ⁝ | |
| [51.46603098,48.55095511,…, 22.82071183,30.27926315,−45,…, −49.02] | [0.90036,0.34598,…, 3.20213,…, 0.01832,44.97257] | |
| Operation Conditions | Sample Data Size | Identification Tags |
|---|---|---|
| Normal | 71 | 1 |
| Open circuit fault | 73 | 2 |
| Short circuit fault | 71 | 3 |
| High resistance fault | 235 | 4 |
| Low resistance fault | 235 | 5 |
| Fault Location | Sample Data Size | Identification Tags |
|---|---|---|
| 0–20 m of the cable measuring section | 123 | 1 |
| 20–40 m of the cable measuring section | 123 | 2 |
| 40–60 m of the cable measuring section | 123 | 3 |
| 60–80 m of the cable measuring section | 123 | 4 |
| 80–100 m of the cable measuring section | 123 | 5 |
| Model | Classification and Location Training Time/s | Classification Accuracy/% | Location Accuracy/% |
|---|---|---|---|
| DBN | 236.84 | 99.27 | 100 |
| CNN | 342.73 | 99.35 | 100 |
| LSTM | 220.46 | 97.92 | 99.67 |
| ANN | 195.62 | 94.33 | 96.29 |
| SVM | 5.06 | 89.76 | 91.57 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, Q.; Li, Y.; Yuan, R.; Meng, Q.; Li, X. Fault Identification and Localization of a Time−Frequency Domain Joint Impedance Spectrum of Cables Based on Deep Belief Networks. Sensors 2023, 23, 684. https://doi.org/10.3390/s23020684
Wan Q, Li Y, Yuan R, Meng Q, Li X. Fault Identification and Localization of a Time−Frequency Domain Joint Impedance Spectrum of Cables Based on Deep Belief Networks. Sensors. 2023; 23(2):684. https://doi.org/10.3390/s23020684
Chicago/Turabian StyleWan, Qingzhu, Yimeng Li, Runjiao Yuan, Qinghai Meng, and Xiaoxue Li. 2023. "Fault Identification and Localization of a Time−Frequency Domain Joint Impedance Spectrum of Cables Based on Deep Belief Networks" Sensors 23, no. 2: 684. https://doi.org/10.3390/s23020684