1. Introduction
Maturity, reliability, ruggedness and versatility make the induction motor one of the most widespread electric machines in industrial applications [
1]. Nevertheless, condition monitoring is of primary importance. Early detection of incipient faults is essential to take action in time. A fast, unscheduled maintenance can avoid more harmful consequences in the machine, thus decreasing downtime and, ultimately, reducing financial loss. Motor damage can happen at a mechanical level (bearing faults, air gap eccentricity, shaft bending) or at an electrical level (stator and rotor faults).
Rotor faults, such as bar and end-ring breakage, only account for about 5% of induction machine faults [
2], but their detection is of primary importance. Stator design has been the subject of large improvements over the years, and stator fault consequences are such that a machine cannot last more than a few seconds with a fault. On the other hand, rotors still maintain traditional structures, mostly the squirrel cage. Moreover, in case of rotor faults, the machine operation is not restricted and it is still possible to save it from more serious consequences, provided that unscheduled maintenance is carried out as soon as possible. Thus, squirrel-cage rotor faults are the focus of the proposed analysis.
An ideal diagnostic procedure requires online implementation, with minimum impact on machine operations, and should avoid additional sensors or estimation of several quantities. Hence, traditional methods are based on signal processing of electrical quantities, such as stator currents. Signal processing includes frequency domain tools, time domain tools and time–frequency analysis [
3,
4].
One of the most widespread diagnostic procedures is motor current signature analysis (MCSA). MCSA investigates the signatures of the fault, which are specific components in the stator current spectrum [
5]. MCSA fails in time-varying conditions or at lower mechanical loads when slip values are low, because rotor fault signatures depend on machine slip. In the former case, the fault signatures are blurred and spread in a wide frequency bandwidth as large as the speed range, and in the latter case, the fault signature is very close to the fundamental component, related to electrical signal frequency. The amplitude of the fault signature is typically several orders of magnitude lower than the fundamental component. Hence, they can be properly distinguished only with a very high time acquisition window, thus achieving very high-frequency resolution. Another classical frequency domain method is extended park vector approach (EPVA) [
6], which is affected by the same drawbacks as MCSA. In [
7], these shortcomings were addressed by the combined use of the maximum covariance method for frequency tracking (MCFT) and ZFFT algorithm. Another method is based on the current signal envelope [
8] computed by the Hilbert transform [
9,
10]. This method is very promising, as it moves the fault signatures away from the fundamental. Still, its performances are poor in time-varying conditions.
The performances of methods based on time domain analysis are quite satisfactory even in time-varying conditions. In [
11,
12], the rotor fault signatures in the stator current were demodulated and the energy of the demodulated signal in a specific bandwidth was used as a fault indicator. However, methods based on time domain are affected by a higher level of noise. Moreover, it is quite difficult to achieve good results with low slip values.
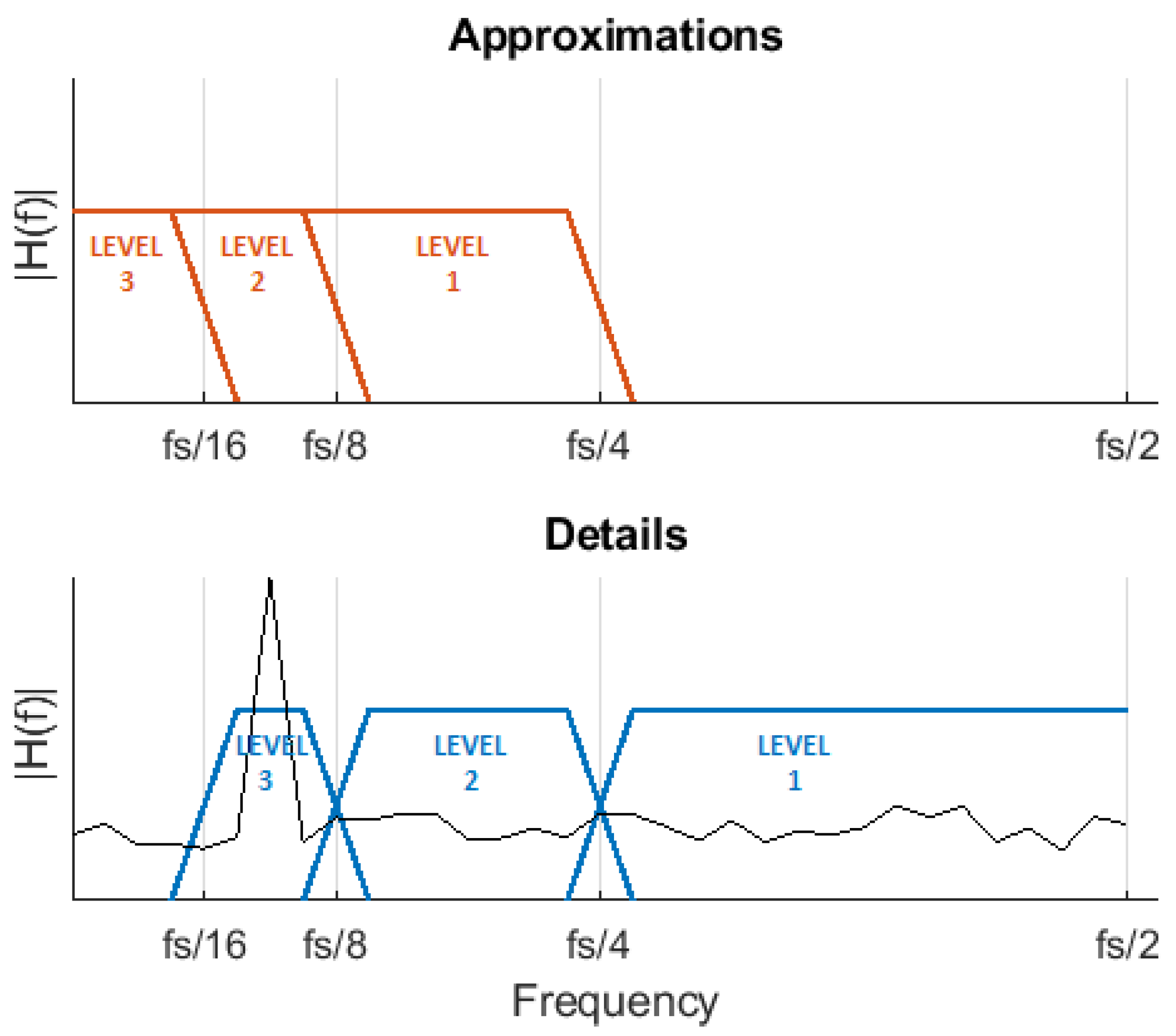
To overcome these limitations, time–frequency approaches were largely investigated; in fact, they are an optimal trade-off between frequency domain and time domain techniques. One of the most-investigated methods is the discrete wavelet transform (DWT). Thanks to DWT decomposition, a signal can be efficiently split into different bandwidths with optimal resolution. In [
13,
14,
15], DWT was used to perform a bandwidth decomposition and to identify the details where the effects of faults show up in stationary conditions. In [
16,
17,
18], DWT was used to process start-up signals, thus allowing the detection of incipient rotor bar faults, even in time-varying conditions. The presence of rotor faults is assessed by checking the time evolution of these details. However, DWT could still be ineffective at low load condition or with variable slip, because fault signature components in the spectrum could be covered by the fundamental component.
This issue can be solved by more complex transforms, e.g., the Dragon transform increases the frequency resolution around the fundamental [
19]. However, they entail a higher computational cost, while minimum complexity is a desirable requirement for industrial applications.
The frequency resolution around the fundamental can be increased by combining two methods, e.g., applying DWT to the envelope of stator current. This joint method was only used in [
20,
21,
22,
23] for constant speed operations. In [
24], it was applied also in time-varying conditions. In this paper, this joint method is further investigated. Specifically, here, the stator signal envelope is computed by means of the Hilbert transform and then processed with DWT, for both stationary and time-varying conditions with some innovative procedures.
All the aforementioned DWT-based methods rely on a qualitative analysis of the time evolution of the details related to rotor faults. In this paper, the diagnostic procedure is based on the energy of the details, not on their time evolution, as in [
25]. A robust diagnostic index is obtained using the energy that smooths the effects of non-precise identification of the fault signature. Moreover, the energy is normalized to the value obtained in healthy conditions, thus realizing a differential diagnosis that masks the effect of aging and local noises.
In this paper, the bandwidth where the fault signature component is located as a function of the slip value is identified, as in [
26]. In contrast, in the previous literature, all the levels were monitored. In summary, in this paper, the Hilbert transform and DWT are used to select an optimal bandwidth where fault components are located and to compute a robust diagnostic index based on energy. In addition, this method could be applied to the detection of other possible machine faults, such as bearings or stator faults, provided that the frequency signature in the stator current spectrum is known.
A quantitative analysis of all methods was made to assess performances in different operating conditions. The comparison between different methods can be used to select the optimal solution in terms of computational cost and performance.
The paper is organized as follows. In
Section 2, the theoretical background of the proposed procedure are presented. In
Section 3, the two methods typically used for diagnosis, MCSA and demodulation, are briefly reviewed. In
Section 4, the proposed method is presented.
Section 5 provides a comparison between MCSA, demodulation, the DWT-based technique of [
17] and the proposed method. The comparison is carried out by numerical simulations, performed in stationary and transient conditions. In
Section 6, experimental results are presented that provide a validation of the assumptions and of simulation results.
Section 7 summaries the results of the different methods, and, finally,
Section 8 draws some conclusions.
2. Modelling of Induction Machine Rotor Faults
In squirrel-cage induction machines, rotor faults are mainly caused by bar or end-ring breakage. These rotor asymmetries entail electrical signals asymmetries in the machine, where the fault signatures are detectable even at an incipient stage.
Specifically, sideband components at
appear in the stator current spectrum, where
s is the slip and
f is the fundamental component of the supply frequency [
27]. Additional harmonics with lower amplitude appear at
.
Fault severity can be linked to the amplitude of the sideband components with a simplified relationship [
28]:
where
is the amplitude of fundamental component in stator current spectrum;
and
are the amplitude of the left and right sideband components, respectively;
b is the number of contiguous broken bars and
B is the total number of rotor bars. Relationship (
1) does not include magnetic saturation, magnetic asymmetry or interbar currents. These three phenomena have a significant impact on rotor asymmetry. Hence, this simplified model can lead to false positive/negative fault alarms [
3]. Dedicated analysis or special rotor manufacturing can reduce the impact of these phenomena and improve fault diagnosis efficacy.
In order to compare healthy and faulty conditions by means of numerical simulations, an effective model of rotor bar breakage is required. Here, the approach presented in [
24] is used, which models rotor asymmetry as an increase in rotor resistance
. This increase is a function of the number of broken bars
b and the total number of bars
B [
29]:
The additional resistance affects dynamic model’s coefficients, resulting in sideband components in stator currents.
Here, this motor model was implemented with numerical simulations, and was tested by operating the machine in a open-loop voltage/frequency control.
6. Experimental Results
In order to obtain an experimental validation, the four methods were applied to a series of experimental acquisitions from the testbed realized in [
11]. Experiments were performed on a induction machine whose parameters are reported in
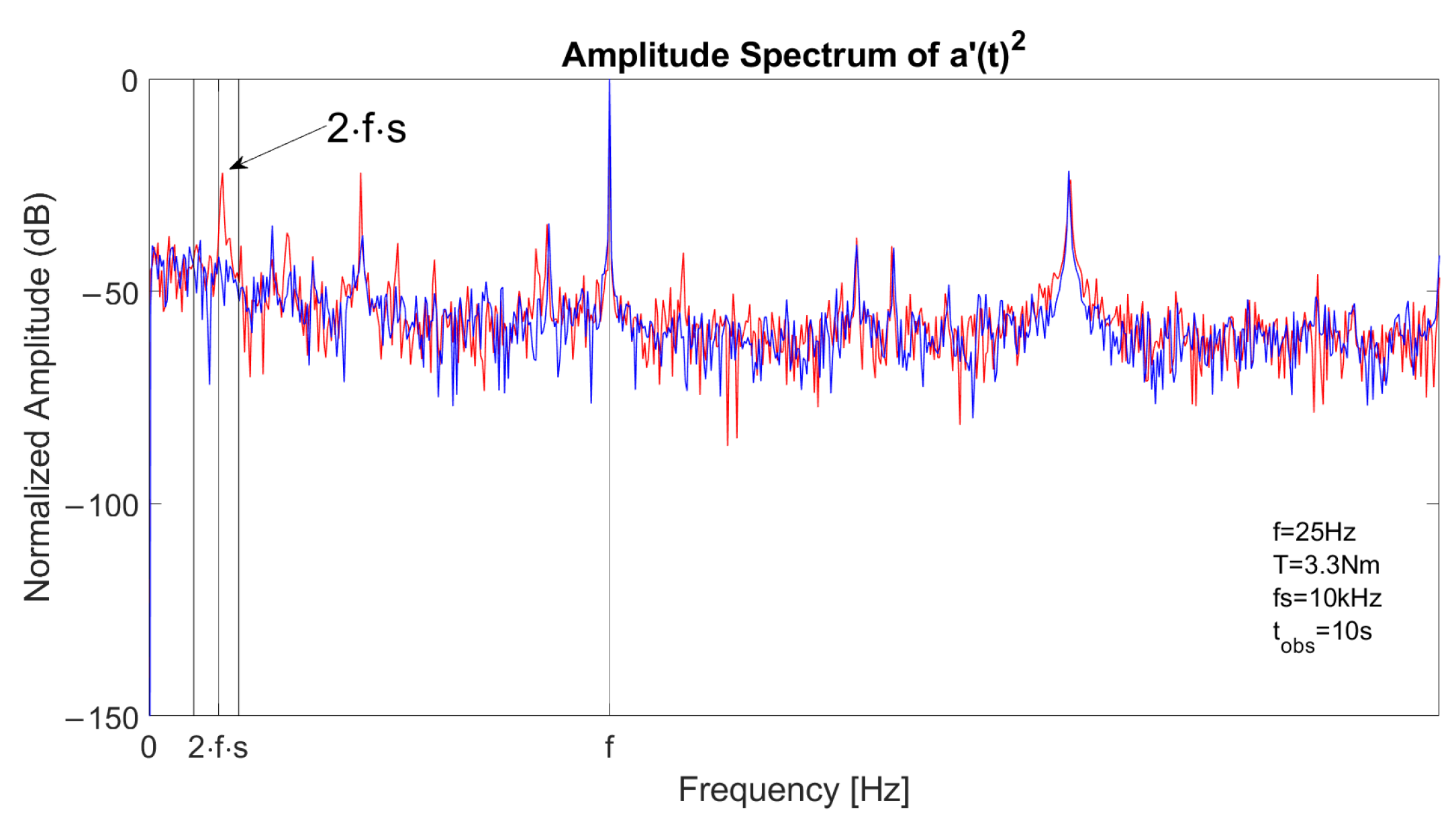
Table 5, for which two rotors were available: one healthy and the other with one drilled rotor bar. The acquisitions were all performed in stationary conditions, with a time acquisition period of
= 10 s, sampling frequency of
= 10 kHz, supply frequency of
f = 25 kHz and requested torque of
T = 3.3 Nm. The load torque level is fairly low, at about one tenth of rated torque.
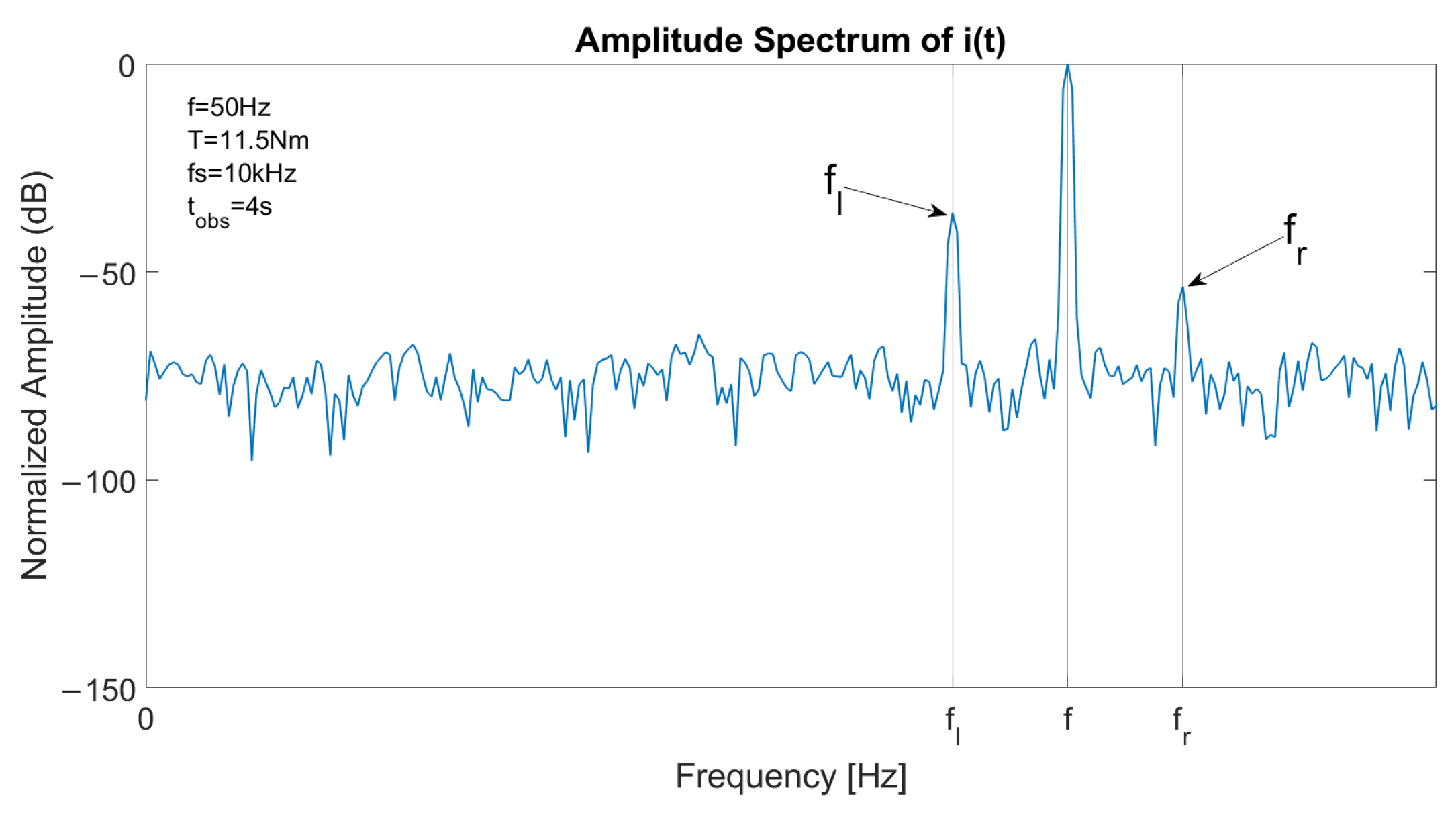
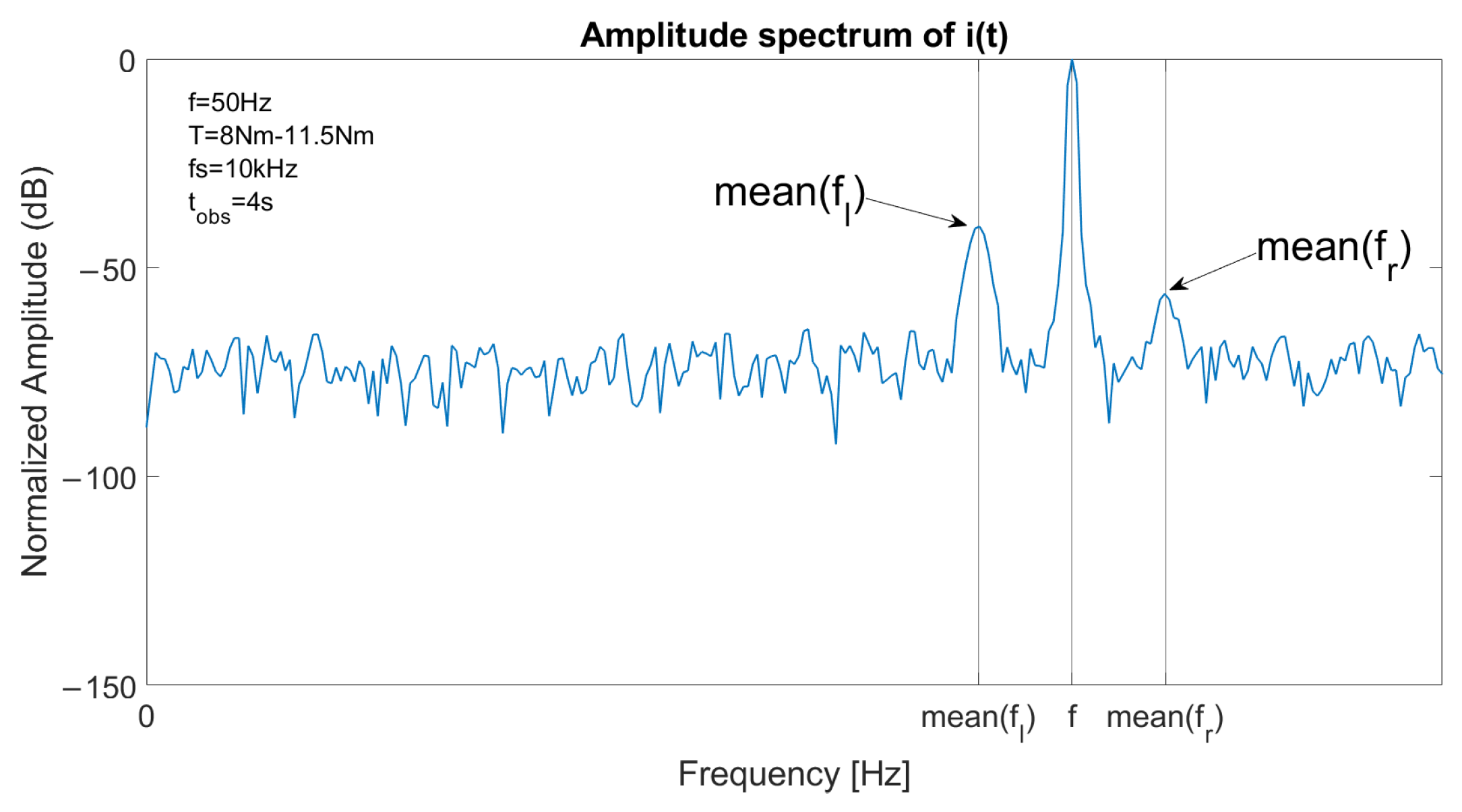
The spectrum of a stator current is reported in
Figure 10 in both healthy (blue) and faulty (red) conditions. The fundamental component is located at
f, left sideband component is located at
and right sideband component is located at
.
Figure 11 depicts the spectrum of the square of the analytical signal
with the fault signature component located at
.
Table 6 reports the results for the four methods: index values between two acquisitions in the same conditions do not show significant variation. Therefore, the results can be considered reliable. In stationary conditions, MCSA and demodulation techniques show a satisfying behavior while the performances of the method based only on DWT are low. In any case, the fault detection capability for the proposed method is the highest.
8. Conclusions
Preventive and reliable fault detection for induction machines is a topic of increasing importance and interest. State-of-the-art techniques are based on the analysis of the fault signatures in the current spectrum (MCSA) or rely on a time domain approach (demodulation technique). Time–frequency approaches have been also largely investigated, especially methods based on the discrete wavelet transform (DWT). The spectrum components related to faults are blurred during time-varying operation, since they are a function of slip. Thus, these methods fail in transient conditions and are highly dependent on the noise level. Here, a method based on the Hilbert transform and DWT is proposed that significantly improves fault detection accuracy in time-varying conditions. This combination uses the Hilbert transform to demodulate the fault signature components, distancing them from the fundamental, and exploits the high-frequency resolution of DWT at low frequencies to compute an optimal bandwidth with which the fault signature is associated.
The variation in energy of the selected decomposition level is used as a differential diagnostic indicator. Thus, the proposed procedure is less dependent on the noise level or operating conditions than MCSA, the demodulation technique or other methods based on DWT only.
The simulation results show that the proposed method can be effectively used to detect rotor faults in a induction machine with variable speed, using an open loop V/f control. Simulation results were further confirmed by a series of experimental acquisitions. In both cases, comparison with MCSA, demodulation and DWT-only techniques proved that the proposed method is the most robust, because of the large gap between healthy and faulty conditions. A quantitative analysis of all methods was made based on diagnostic indicators. The comparison between the different methods show that the proposed method is a good solution in terms of computational cost and performance.
This technique can be applied not only to the detection of rotor bar faults, but it can also be extended to the detection of other possible machine faults, provided that the frequency signature in the stator current spectrum is known. In addition, thanks to the improved frequency resolution, the proposed method could be of help in the detection of multiple different combined faults.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}