
Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning

Abstract
:1. Introduction
- Synergism of on-body IMU and UWB Two-Way Ranging (TWR) measurements for the accurate estimation of body–tag–anchor orientation and mitigation of human body shadowing effects.
- A robust GMM-based, orientation-aware range error model for the mitigation of human body shadowing effects in on-body UWB-TWR pedestrian tracking.
- Integration of the GMM-based range error model with a Gaussian Mixture Filter, which provides higher localization accuracy than the state-of-the-art methods while reducing the computation cost by an order of magnitude.
2. Related Work
2.1. Effects of Human Body Shadowing on UWB Ranging
2.2. Detection and Mitigation of Human Body Shadowing Effects
3. Materials and Methods
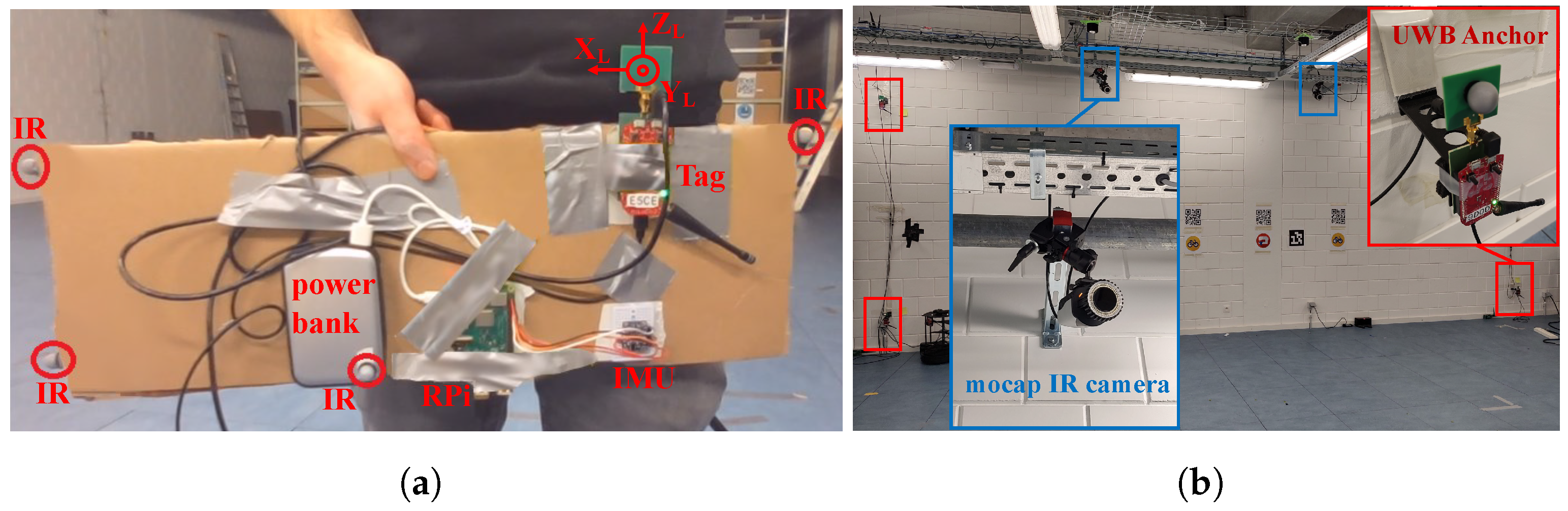
3.1. Experiment Setup
3.1.1. Data Collection
3.1.2. UWB
3.1.3. IMU
3.1.4. Motion Capture (Ground Truth)
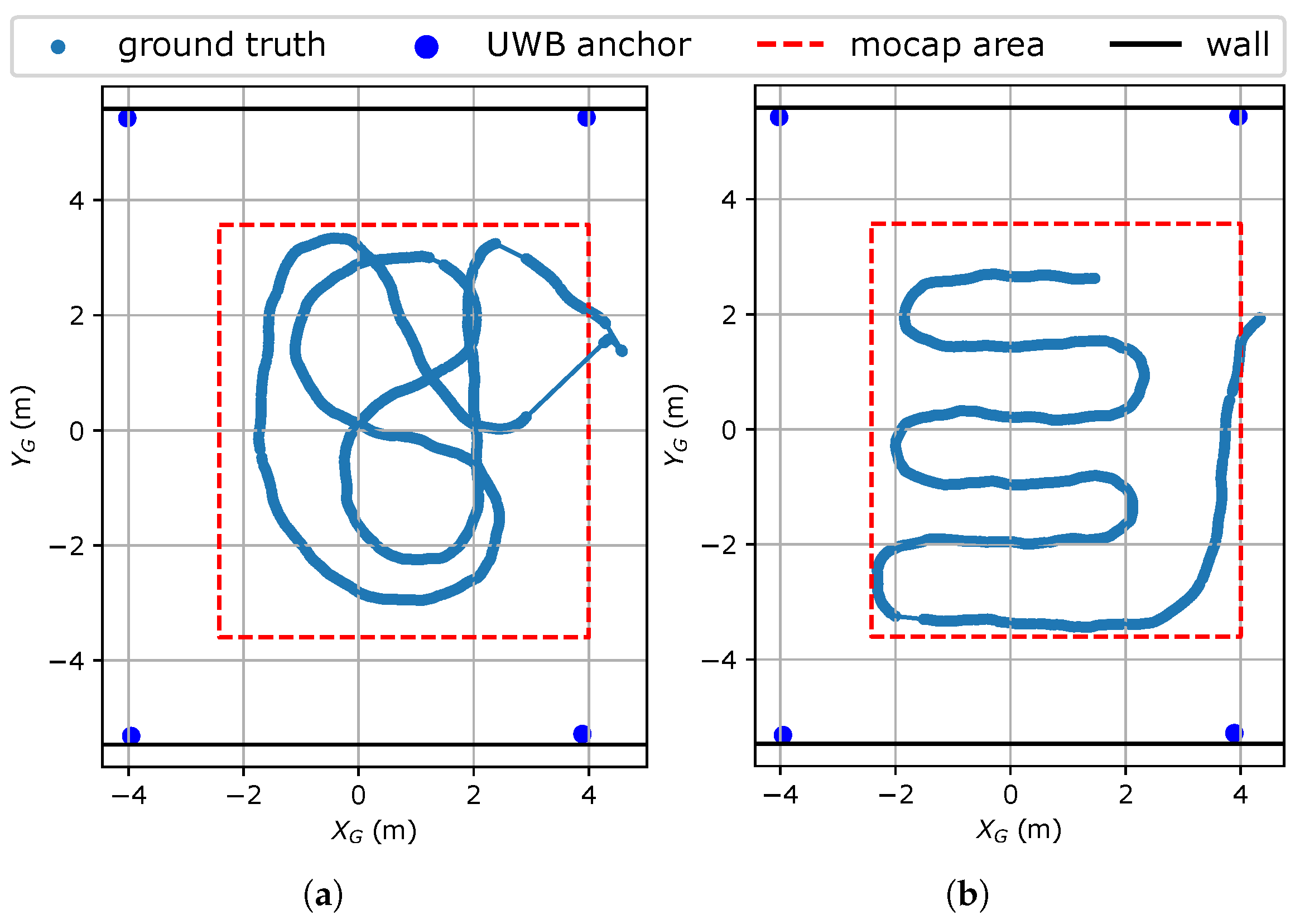
3.1.5. Environment and Trajectories
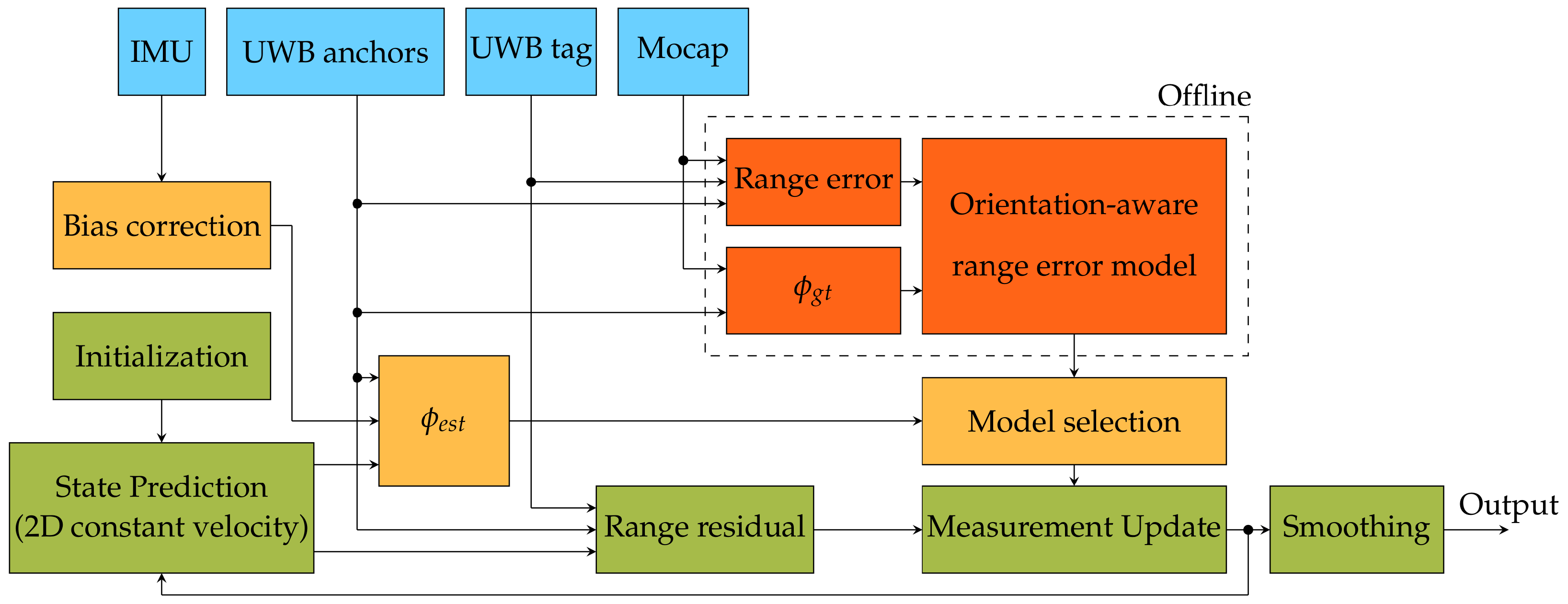
3.2. System Overview
3.2.1. Range-Based Filtering
3.2.2. Proposed HBS Detection and Mitigation Technique
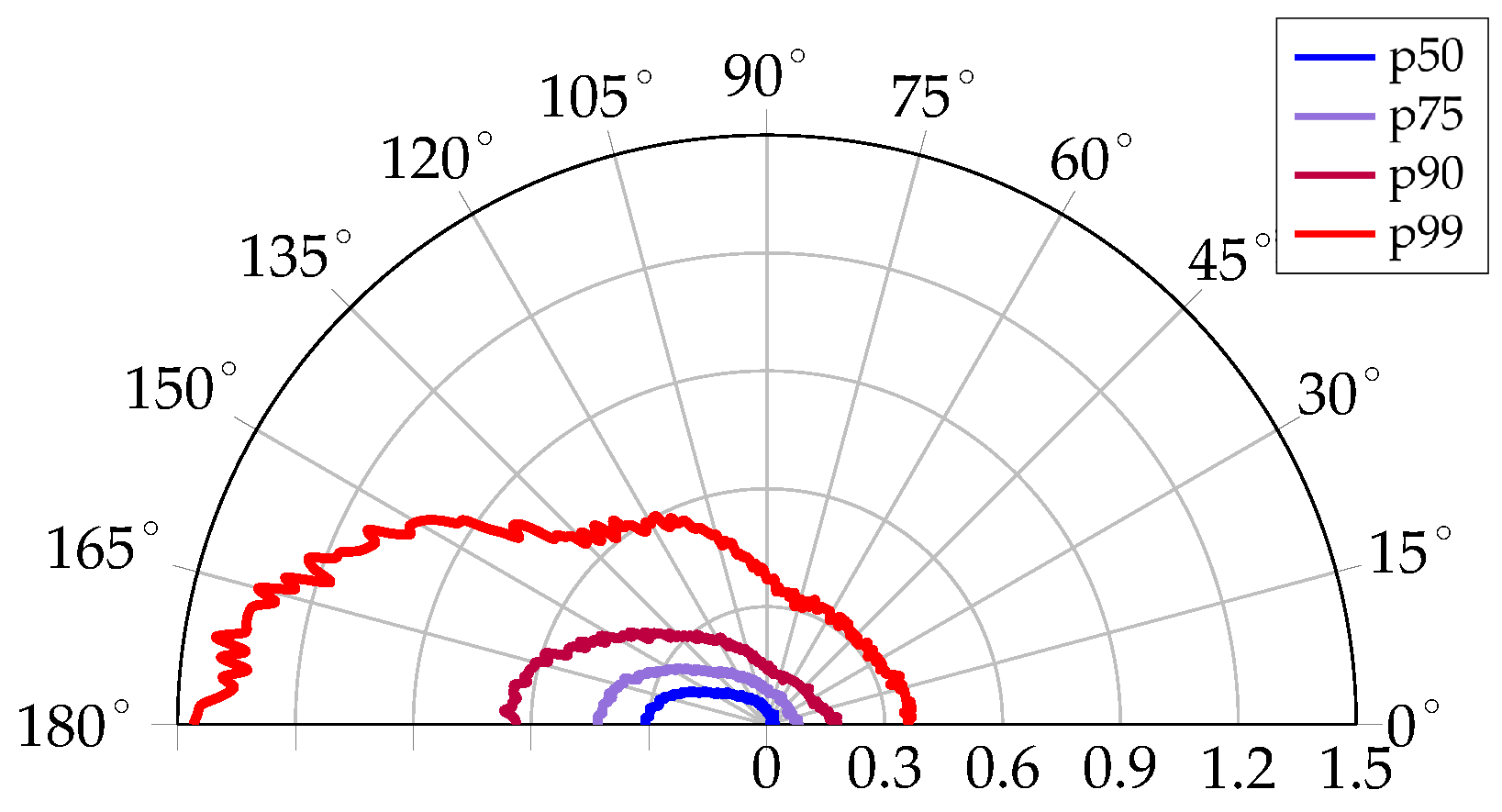
3.3. Characterization of Human Body Shadowing Effect on UWB Range Errors
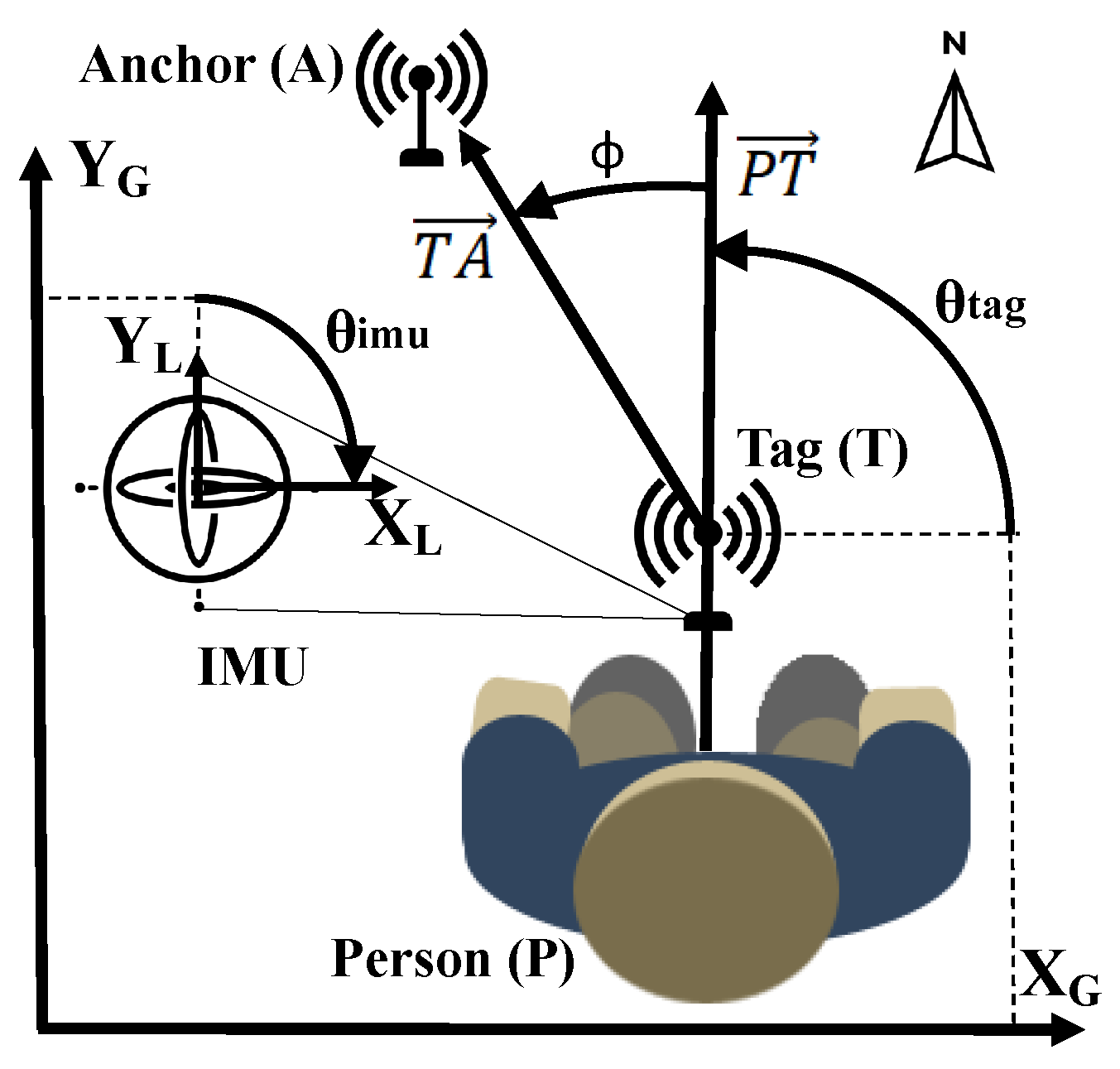
3.3.1. Estimation of Tag–Body–Anchor Orientation
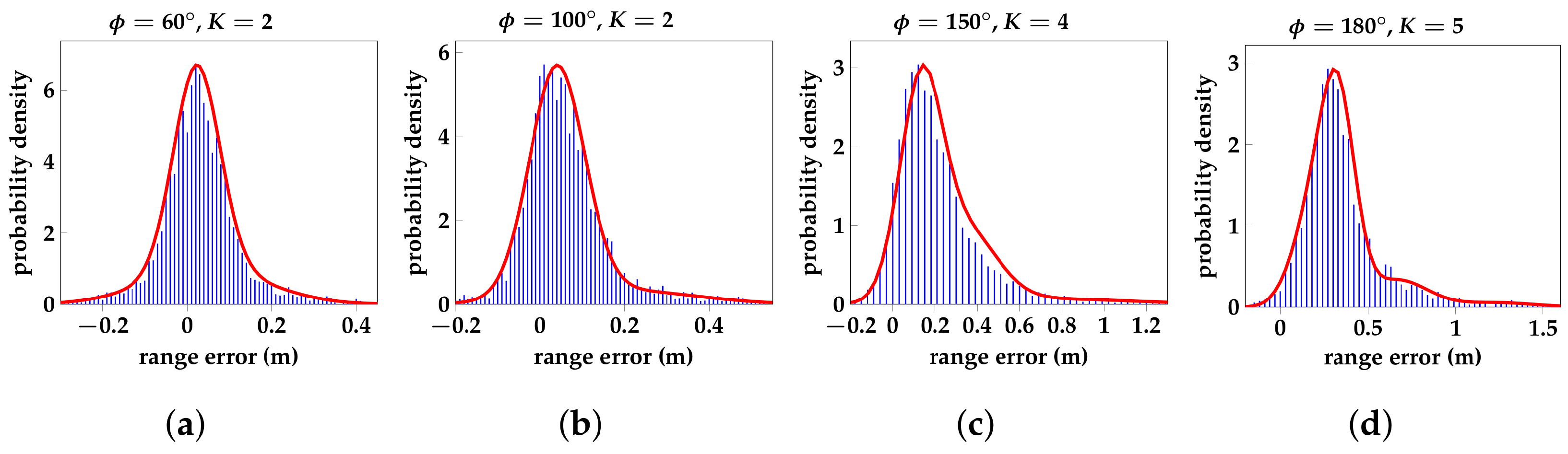
3.3.2. Robust Orientation-Aware Gaussian Mixture Error Model
3.4. Mitigation of Human Body Shadowing Effects
3.4.1. Unscented Gaussian Sum Filter
3.4.2. Particle Filter
3.4.3. Computational Efficiency Improvements
3.4.4. Smoothing
4. Results
4.1. Human Body Shadowing Effect on UWB Ranging Accuracy
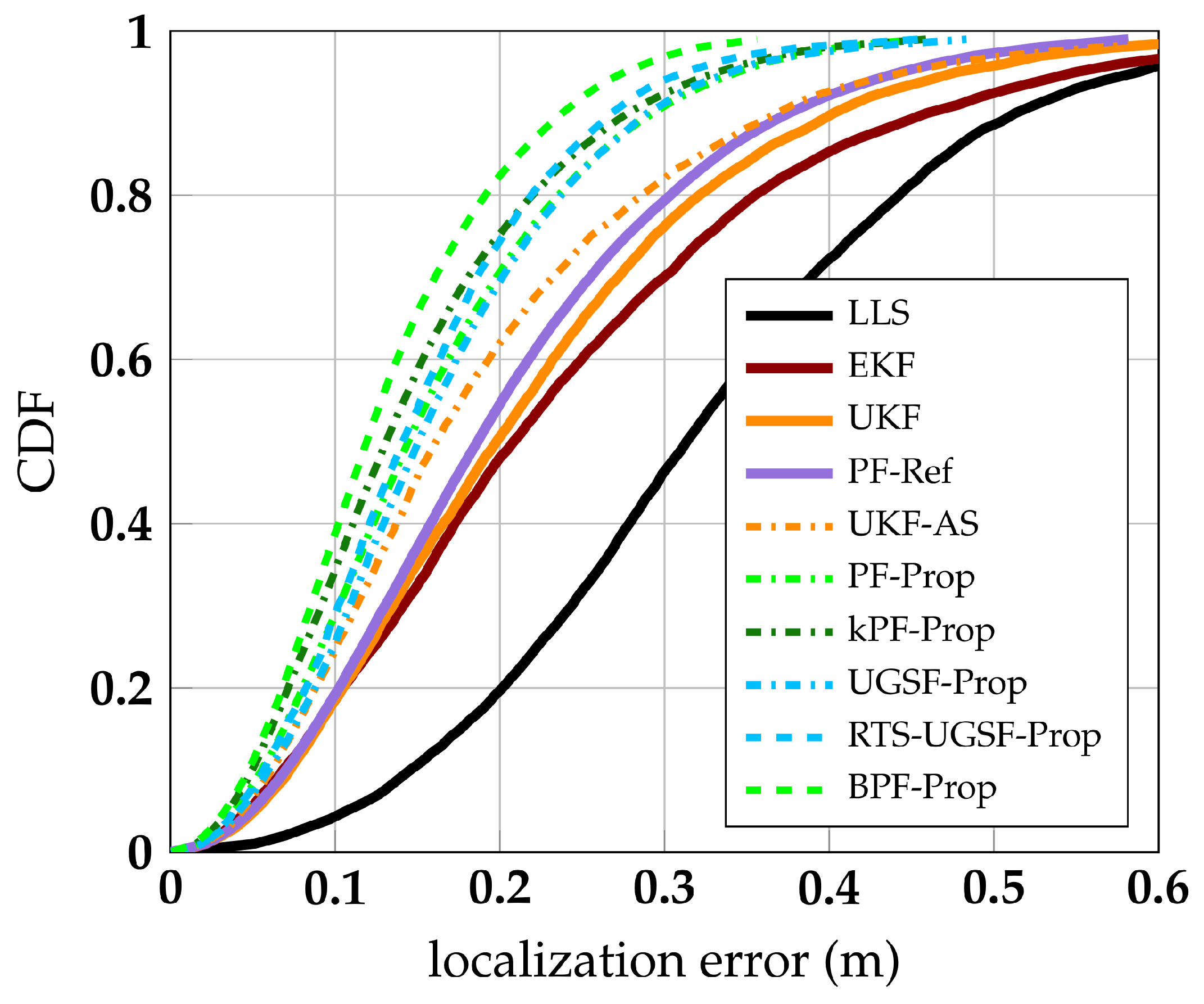
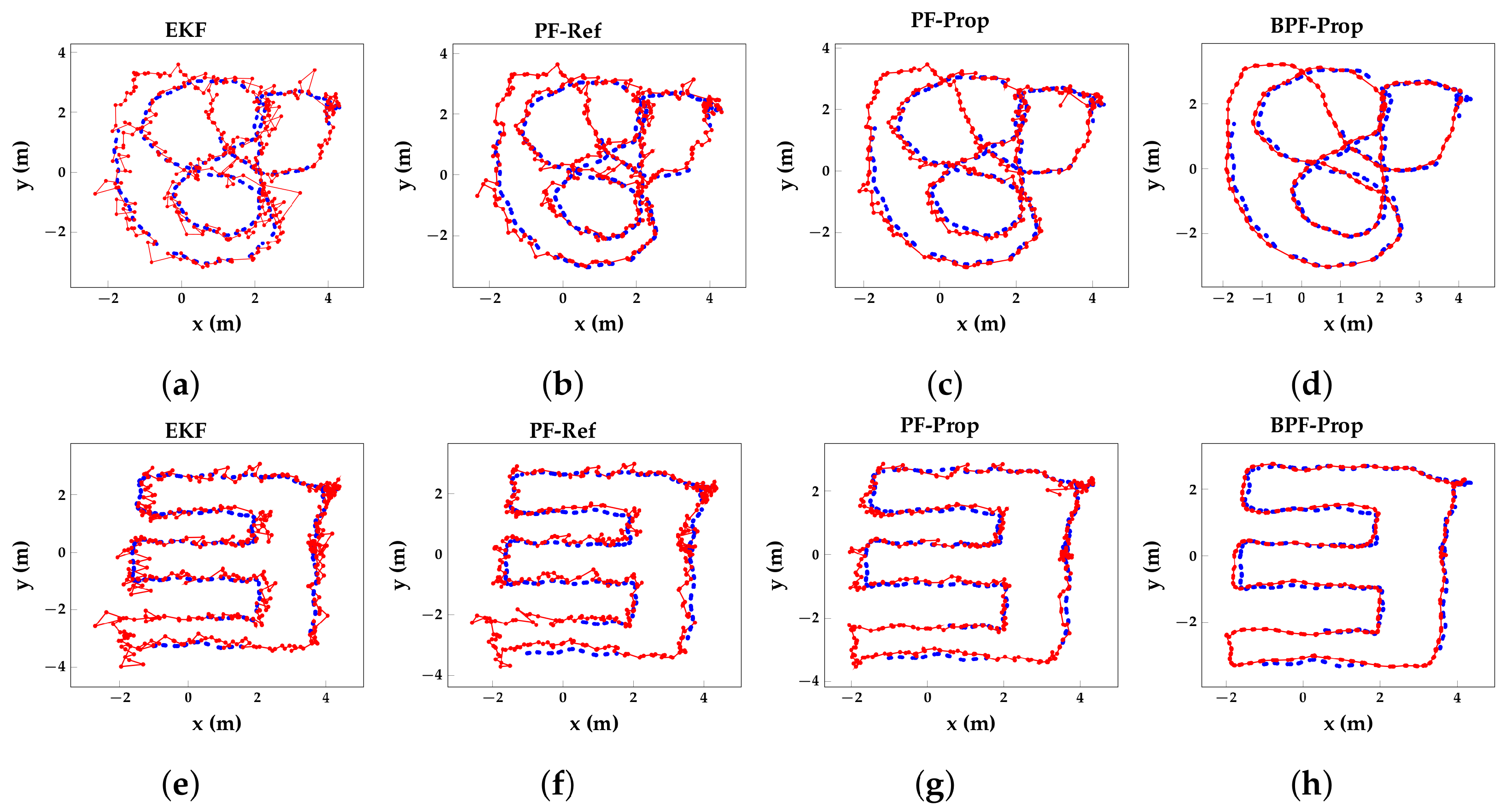
4.2. Human Body Shadowing Mitigation for UWB Localization
4.2.1. Algorithm Configurations
4.2.2. Benchmark of Proposed Algorithms
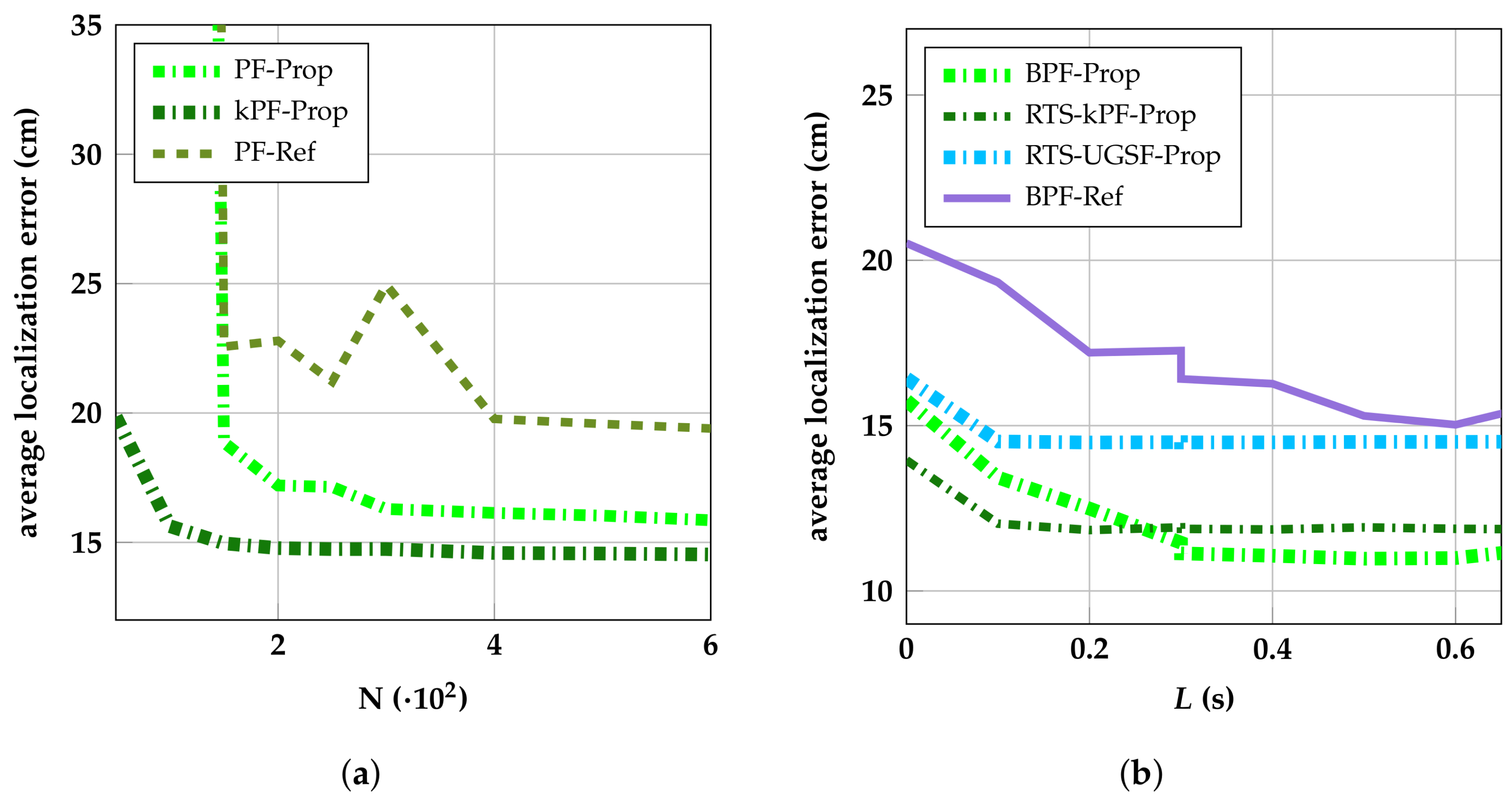
4.2.3. Selecting Algorithm Parameters
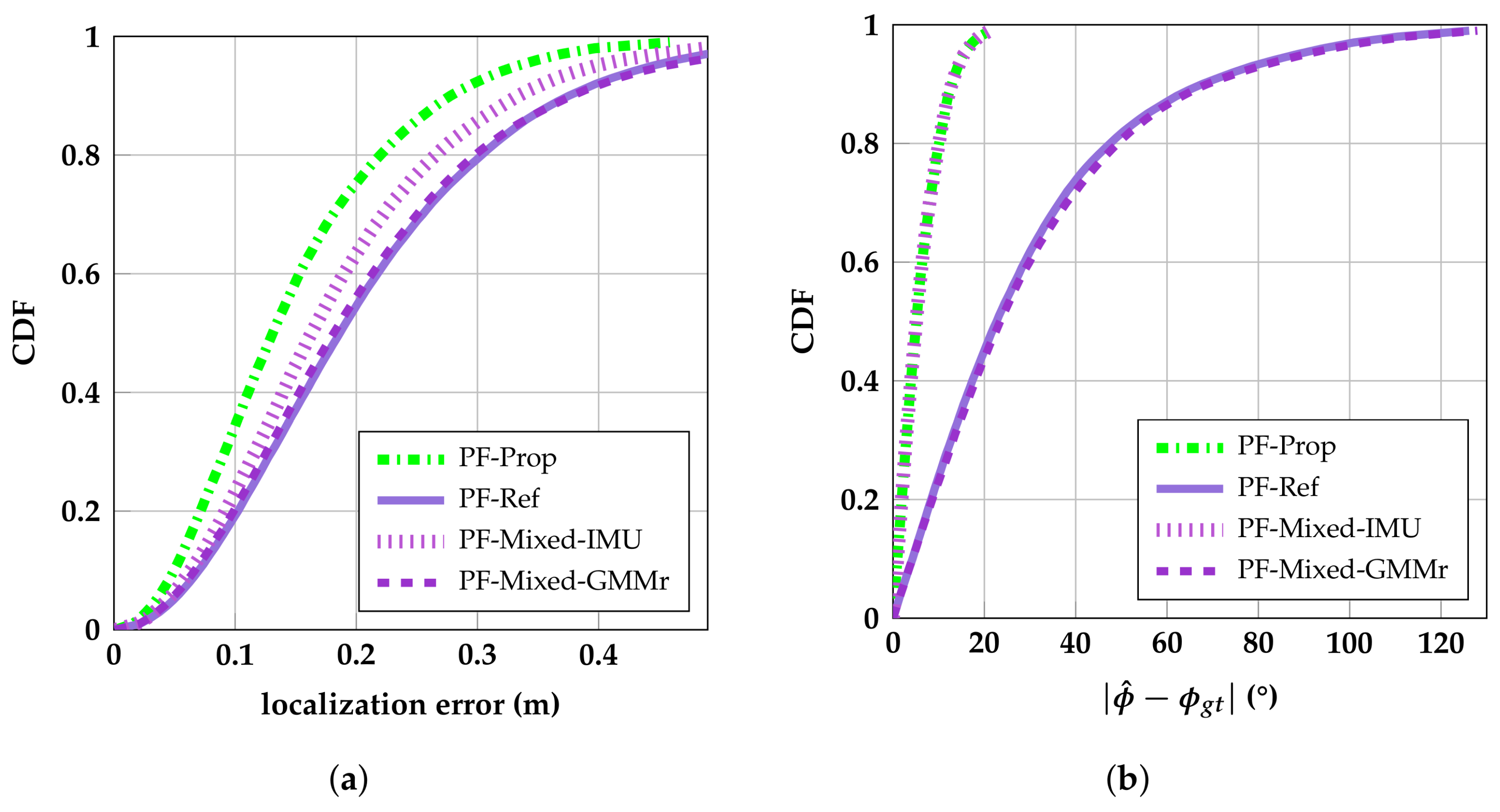
4.2.4. Contribution of the IMU- and GMM-Based Error Model
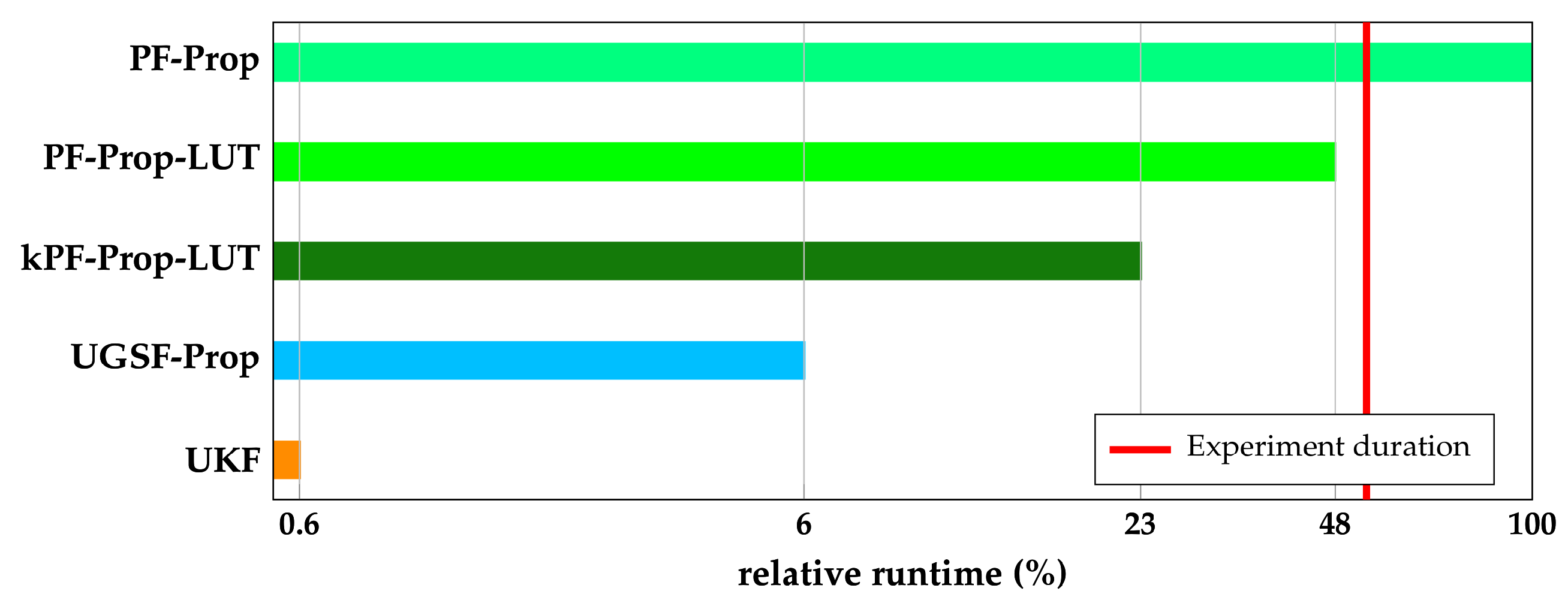
4.2.5. Runtime Analysis
5. Discussion
5.1. Results
5.2. Limitations and Shortcomings
5.3. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AHRS | Attitude and Heading Reference System |
| BIC | Bayesian Information Criterion |
| BPF | Backtracking Particle Filter |
| CDF | Cumulative Distribution Function |
| CIR | Channel Impulse Response |
| COTS | Commercial Off-the-Shelf |
| CV | Constant Velocity |
| DoF | Degrees of Freedom |
| EKF | Extended Kalman Filter |
| EM | Expectation–Maximization |
| GMF | Gaussian Mixture Filter |
| GMM | Gaussian Mixture Model |
| GSF | Gaussian Sum Filter |
| HBS | Human Body Shadowing |
| IIoT | Industrial Internet of Things |
| IMU | Inertial Measurement Unit |
| IPS | Indoor Positioning System |
| IR | Infrared |
| IoT | Internet of Things |
| KF | Kalman Filter |
| LLS | Linearized Least Squares |
| LUT | Lookup table |
| LoS | Line-of-sight |
| NLoS | Non-line-of-sight |
| Probability Density Function | |
| PDR | Pedestrian Dead Reckoning |
| PF | Particle Filter |
| RPi | Raspberry Pi |
| RTS | Rauch–Tung–Striebel |
| TWR | Two-Way Ranging |
| ToF | Time-of-flight |
| UGSF | Unscented Gaussian Sum Filter |
| UKF | Unscented Kalman Filter |
| UT | Unscented Transform |
| UWB | Ultra-Wideband |
| VLP | Visible Light Positioning |
| mocap | Motion capture |
References
- Macoir, N.; Bauwens, J.; Jooris, B.; Van Herbruggen, B.; Rossey, J.; Hoebeke, J.; De Poorter, E. UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management. Sensors 2019, 19, 467. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Luo, Z.; Jiang, W. AGV Localization System Based on Ultra-Wideband and Vision Guidance. Electronics 2020, 9, 448. [Google Scholar] [CrossRef]
- Delamare, M.; Duval, F.; Boutteau, R. A New Dataset of People Flow in an Industrial Site with UWB and Motion Capture Systems. Sensors 2020, 20, 4511. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.; Hoe, L.N.; Loon, L.L. Integrated UWB and GPS location sensing system in hospital environment. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010; pp. 286–289. [Google Scholar] [CrossRef]
- Fetzer, T.; Ebner, F.; Bullmann, M.; Deinzer, F.; Grzegorzek, M. Smartphone-Based Indoor Localization within a 13th Century Historic Building. Sensors 2018, 18, 4095. [Google Scholar] [CrossRef] [PubMed]
- Tekler, Z.D.; Chong, A. Occupancy prediction using deep learning approaches across multiple space types: A minimum sensing strategy. Build. Environ. 2022, 226, 109689. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Bluetooth Low Energy Based Occupancy Detection for Emergency Management. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 September 2016; pp. 31–38. [Google Scholar]
- Tekler, Z.D.; Low, R.; Yuen, C.; Blessing, L. Plug-Mate: An IoT-based occupancy-driven plug load management system in smart buildings. Build. Environ. 2022, 223, 109472. [Google Scholar] [CrossRef]
- Balaji, B.; Xu, J.; Nwokafor, A.; Gupta, R.; Agarwal, Y. Sentinel: Occupancy Based HVAC Actuation Using Existing WiFi Infrastructure within Commercial Buildings. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems (SenSys ’13), Rome, Italy, 11–15 November 2013. [Google Scholar] [CrossRef]
- Vleugels, R.; Van Herbruggen, B.; Fontaine, J.; De Poorter, E. Ultra-Wideband Indoor Positioning and IMU-Based Activity Recognition for Ice Hockey Analytics. Sensors 2021, 21, 4650. [Google Scholar] [CrossRef]
- BASRI, C.; El Khadimi, A. Survey on indoor localization system and recent advances of WIFI fingerprinting technique. In Proceedings of the 2016 5th International Conference on Multimedia Computing and Systems (ICMCS), Marrakech, Morocco, 29 September–1 October 2016; pp. 253–259. [Google Scholar] [CrossRef]
- Jain, C.; Sashank, G.V.S.; N, V.; Markkandan, S. Low-cost BLE based Indoor Localization using RSSI Fingerprinting and Machine Learning. In Proceedings of the 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; pp. 363–367. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Alhadhrami, S.; Al-Ammar, M.; Al-Khalifa, H. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L.; Li, H. Indoor Positioning Systems Based on Visible Light Communication: State of the Art. IEEE Commun. Surv. Tutorials 2017, 19, 2871–2893. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Costa, A.C.; Torres-Sospedra, J.; Painho, M.; Huerta, J. Environment-Aware Regression for Indoor Localization Based on WiFi Fingerprinting. IEEE Sensors J. 2022, 22, 4978–4988. [Google Scholar] [CrossRef]
- Plets, D.; Joseph, W.; Vanhecke, K.; Tanghe, E.; Martens, L. Coverage prediction and optimization algorithms for indoor environments. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 123. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Bastiaens, S.; Gerwen, J.V.V.; Macoir, N.; Deprez, K.; De Cock, C.; Joseph, W.; De Poorter, E.; Plets, D. Experimental Benchmarking of Next-Gen Indoor Positioning Technologies (Unmodulated) Visible Light Positioning and Ultra-Wideband. IEEE Internet Things J. 2022, 9, 17858–17870. [Google Scholar] [CrossRef]
- Kumpuniemi, T.; Hamalainen, M.; Makela, J.P.; Iinatti, J. Path loss modeling for UWB creeping waves around human body. In Proceedings of the International Symposium on Medical Information and Communication Technology (ISMICT), Lisbon, Portugal, 6–8 February 2017; pp. 44–48. [Google Scholar] [CrossRef]
- Sasaki, E.; Hanaki, H.; Iwashita, H.; Naiki, K.; Kajiwara, A. Effect of human body shadowing on UWB radio channel. In Proceedings of the 2016 International Workshop on Antenna Technology (iWAT 2016), Cocoa Beach, FL, USA, 29 February–2 March 2016; pp. 68–70. [Google Scholar] [CrossRef]
- Otim, T.; Díez, L.E.; Bahillo, A.; Lopez-Iturri, P.; Falcone, F. Effects of the body wearable sensor position on the UWB localization accuracy. Electronics 2019, 8, 1351. [Google Scholar] [CrossRef]
- Otim, T.; Bahillo, A.; Díez, L.E.; Lopez-Iturri, P.; Falcone, F. FDTD and Empirical Exploration of Human Body and UWB Radiation Interaction on TOF Ranging. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1119–1123. [Google Scholar] [CrossRef]
- Otim, T.; Bahillo, A.; Díez, L.E.; Lopez-Iturri, P.; Falcone, F. Impact of Body Wearable Sensor Positions on UWB Ranging. IEEE Sensors J. 2019, 19, 11449–11457. [Google Scholar] [CrossRef]
- Stahlke, M.; Kram, S.; Mutschler, C.; Mahr, T. NLOS Detection using UWB Channel Impulse Responses and Convolutional Neural Networks. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Feng, D.; Peng, J.; Zhuang, Y.; Guo, C.; Zhang, T.; Chu, Y.; Zhou, X.; Xia, X.G. An Adaptive IMU/UWB Fusion Method for NLOS Indoor Positioning and Navigation. IEEE Internet Things J. 2023, 10, 11414–11428, Conference Name: IEEE Internet of Things Journal. [Google Scholar] [CrossRef]
- Kim, D.H.; Pyun, J.Y. NLOS Identification Based UWB and PDR Hybrid Positioning System. IEEE Access 2021, 9, 102917–102929. [Google Scholar] [CrossRef]
- Otim, T.; Bahillo, A.; Díez, L.E.; Lopez-Iturri, P.; Falcone, F. Towards Sub-Meter Level UWB Indoor Localization Using Body Wearable Sensors. IEEE Access 2020, 8, 178886–178899. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Q.; Li, Z.; Mi, J.; Zhang, K. Research on High Precision Positioning Method for Pedestrians in Indoor Complex Environments Based on UWB/IMU. Remote Sens. 2023, 15, 3555. [Google Scholar] [CrossRef]
- De Cock, C.; Coene, S.; van Herbruggen, B.; Martens, L.; Joseph, W.; Plets, D. IMU-aided detection and mitigation of Human Body Shadowing for UWB positioning. In Proceedings of the 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–8 September 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Tian, Q.; Wang, K.I.; Salcic, Z. Human Body Shadowing Effect on UWB-Based Ranging System for Pedestrian Tracking. IEEE Trans. Instrum. Meas. 2019, 68, 4028–4037. [Google Scholar] [CrossRef]
- Ridolfi, M.; Vandermeeren, S.; Defraye, J.; Steendam, H.; Gerlo, J.; Clercq, D.D.; Hoebeke, J.; Poorter, E.D. Experimental evaluation of uwb indoor positioning for sport postures. Sensors 2018, 18, 168. [Google Scholar] [CrossRef]
- Coene, S.; Cock, C.D.; Tanghe, E.; Plets, D.; Martens, L.; Joseph, W. Using SAGE on COTS UWB Signals for TOA Estimation and Body Shadowing Effect Quantification. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Dwek, N.; Birem, M.; Geebelen, K.; Hostens, E.; Mishra, A.; Steckel, J.; Yudanto, R. Improving the Accuracy and Robustness of Ultra-Wideband Localization Through Sensor Fusion and Outlier Detection. IEEE Robot. Autom. Lett. 2020, 5, 32–39. [Google Scholar] [CrossRef]
- Gao, Z.; Jiao, Y.; Yang, W.; Li, X.; Wang, Y. A Method for UWB Localization Based on CNN-SVM and Hybrid Locating Algorithm. Information 2023, 14, 46. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, L.; Wang, W.; Zhang, K. Hyperbolic Localization Algorithm in Mixed LOS- NLOS Environments. In Proceedings of the 2020 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 28–30 July 2020; pp. 847–850. [Google Scholar] [CrossRef]
- Jiang, C.; Shen, J.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. UWB NLOS/LOS Classification Using Deep Learning Method. IEEE Commun. Lett. 2020, 24, 2226–2230. [Google Scholar] [CrossRef]
- Gururaj, K.; Rajendra, A.K.; Song, Y.; Law, C.L.; Cai, G. Real-time identification of NLOS range measurements for enhanced UWB localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A novel NLOS mitigation algorithm for UWB localization in harsh indoor environments. IEEE Trans. Veh. Technol. 2019, 68, 686–699. [Google Scholar] [CrossRef]
- Che, F.; Ahmed, Q.Z.; Fontaine, J.; Van Herbruggen, B.; Shahid, A.; De Poorter, E.; Lazaridis, P.I. Feature-Based Generalized Gaussian Distribution Method for NLoS Detection in Ultra-Wideband (UWB) Indoor Positioning System. IEEE Sensors J. 2022, 22, 18726–18739. [Google Scholar] [CrossRef]
- Yang, H.; Wang, Y.; Seow, C.K.; Sun, M.; Si, M.; Huang, L. UWB Sensor-Based Indoor LOS/NLOS Localization with Support Vector Machine Learning. IEEE Sensors J. 2023, 23, 2988–3004. [Google Scholar] [CrossRef]
- Flueratoru, L.; Wehrli, S.; Magno, M.; Lohan, E.S.; Niculescu, D. High-Accuracy Ranging and Localization with Ultra-Wideband Communications for Energy-Constrained Devices. arXiv 2021, arXiv:2104.11042. [Google Scholar]
- Van Herbruggen, B.; Jooris, B.; Rossey, J.; Ridolfi, M.; Macoir, N.; Van Den Brande, Q.; Lemey, S.; De Poorter, E. Wi-pos: A low-cost, open source ultra-wideband (UWB) hardware platform with long range sub-GHZ backbone. Sensors 2019, 19, 1548. [Google Scholar] [CrossRef]
- Labbe, R. Kalman and Bayesian Filters in Python. 2014. Available online: https://github.com/rlabbe/Kalman-and-Bayesian-Filters-in-Python (accessed on 9 August 2023).
- Alspach, D.; Sorenson, H. Nonlinear Bayesian estimation using Gaussian sum approximations. IEEE Trans. Autom. Control 1972, 17, 439–448. [Google Scholar] [CrossRef]
- Müller, P.; Ali-Löytty, S.; Dashti, M.; Nurminen, H.; Piché, R. Gaussian mixture filter allowing negative weights and its application to positioning using signal strength measurements. In Proceedings of the 2012 9th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 15–16 March 2012; pp. 71–76. [Google Scholar] [CrossRef]
- Norrdine, A. An Algebraic Solution to the Multilateration Problem. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012. [Google Scholar] [CrossRef]
- Woodman, O.J. An Introduction to Inertial Navigation; University of Cambridge, Computer Laboratory: Cambridge, UK, 2007; Available online: https://www.cl.cam.ac.uk/techreports/UCAM-CL-TR-696.pdf (accessed on 9 August 2023).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Simandl, M.; Duník, J. Sigma point Gaussian sum filter design using square root unscented filters. IFAC Proc. Vol. 2005, 38, 1000–1005. [Google Scholar] [CrossRef]
- Wan, E.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, AB, Canada, 4 October 2000; (Cat. No. 00EX373). pp. 153–158. [Google Scholar] [CrossRef]
- Rauch, H.E.; Striebel, C.T.; Tung, F. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]
- De Cock, C.; Joseph, W.; Martens, L.; Trogh, J.; Plets, D. Multi-Floor Indoor Pedestrian Dead Reckoning with a Backtracking Particle Filter and Viterbi-Based Floor Number Detection. Sensors 2021, 21, 4565. [Google Scholar] [CrossRef]
- Trogh, J.; Plets, D.; Thielens, A.; Martens, L.; Joseph, W. Enhanced Indoor Location Tracking Through Body Shadowing Compensation. IEEE Sensors J. 2016, 16, 2105–2114. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, H.B.; Du, Q.X.; Tang, S.M. A Survey of the Research Status of Pedestrian Dead Reckoning Systems Based on Inertial Sensors. Int. J. Autom. Comput. 2019, 16, 65–83. [Google Scholar] [CrossRef]
- Yadav, N.; Bleakley, C. Accurate Orientation Estimation Using AHRS under Conditions of Magnetic Distortion. Sensors 2014, 14, 20008–20024. [Google Scholar] [CrossRef]
- Pfeifer, T.; Protzel, P. Robust Sensor Fusion with Self-Tuning Mixture Models. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3678–3685. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| General | |
| Environment type | Open space industrial lab |
| Measurement area | m × m |
| # Trajectories | 2 (performed 5 times each) |
| Total experiment length | 9 min, 812 m |
| Sensors | UWB, IMU, mocap (ground truth) |
| UWB | |
| Hardware | Wi-Pos [42] |
| # Anchors | 8 available, 4 used |
| Anchor geometry | Rectangular |
| Tag position | Abdomen |
| Sample rate (Hz) | 23 (8 anchors), (4 anchors) |
| # Measurements | 12,482 (8 anchors), 6241 (4 anchors) |
| UWB Channel | 5 |
| Pulse repetition frequency (MHz) | 64 |
| Bitrate (kb/s) | 850 |
| Preamble length (bytes) | 1024 |
| IMU | |
| Hardware | 9-DoF Adafruit BNO055 |
| Sample rate (Hz) | 100 |
| Mocap (Ground Truth) | |
| Hardware | 6-DoF Qualisys system (7 cameras) |
| Sample rate (Hz) | 90 |
| Tracking rate (%) | 90% |
| Algorithm | Originality | Description |
|---|---|---|
| PF-Prop | New | PF with proposed robust GMM-based range error model and IMU-based orientation |
| kPF-Prop | New | PF-Prop with Kalman prediction step |
| UGSF-Prop | New | UGSF with proposed robust GMM-based range error model and IMU-based orientation |
| PF-Ref | State-of-the-art | Referenced PF fitting the range error model to our training data [27] |
| PF-Ref (unfit) | State-of-the-art | Referenced PF [27] using range error model parameters from the paper |
| PF-Mixed-IMU | Mixed | PF with IMU-based orientation and referenced [27] |
| PF-Mixed-GMMr | Mixed | PF with proposed range error model and position-based heading estimation of [53] as used in [27] |
| LLS | Known | Stateless Linearized Least Squares (LLS) multilateration |
| EKF/UKF | Known | Default extended/unscented Kalman filter with CV process model |
| UKF-AS | New | UKF with orientation-aware anchor selection by thresholding |
| BPF-* | Known | PF-* algorithm, but with a Backtracking PF, thus acting as a smoother |
| RTS-* | Known | Rauch-Tung-Striebel (RTS) smoother implemented on top of * algorithm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Cock, C.; Tanghe, E.; Joseph, W.; Plets, D. Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning. Sensors 2023, 23, 8289. https://doi.org/10.3390/s23198289
De Cock C, Tanghe E, Joseph W, Plets D. Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning. Sensors. 2023; 23(19):8289. https://doi.org/10.3390/s23198289
Chicago/Turabian StyleDe Cock, Cedric, Emmeric Tanghe, Wout Joseph, and David Plets. 2023. "Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning" Sensors 23, no. 19: 8289. https://doi.org/10.3390/s23198289