



Using Schlieren Imaging and a Radar Acoustic Sounding System for the Detection of Close-in Air Turbulence †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Operational Principles
2.1. Schlieren Operational Principles
Schlieren Imaging and Acoustic Waves
2.2. RASS Operational Principles
2.2.1. Bragg Matching
2.2.2. Focus Effect
2.2.3. Effect of Turbulence
2.2.4. Atmospheric Attenuation
3. Materials and Methods
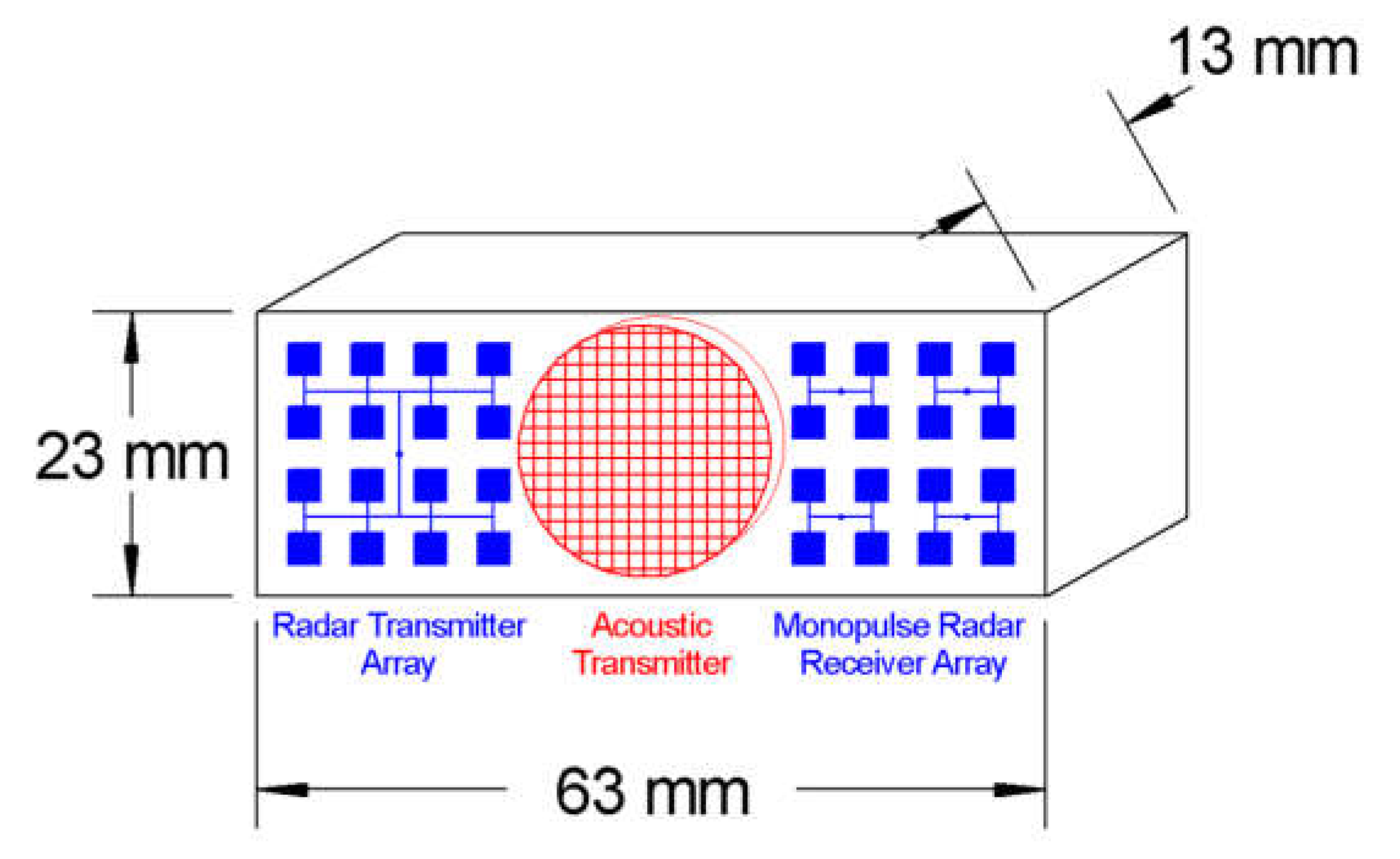
3.1. Monostatic RASS Radar System
3.1.1. System Configuration
- Operational frequency 17.65 GHz;
- RF transmit power 24 dBm;
- Antenna gain 25 dB;
- Receive filter bandwidth 3 kHz;
- System noise figure 5 dB;
- 100 pulses integrated.
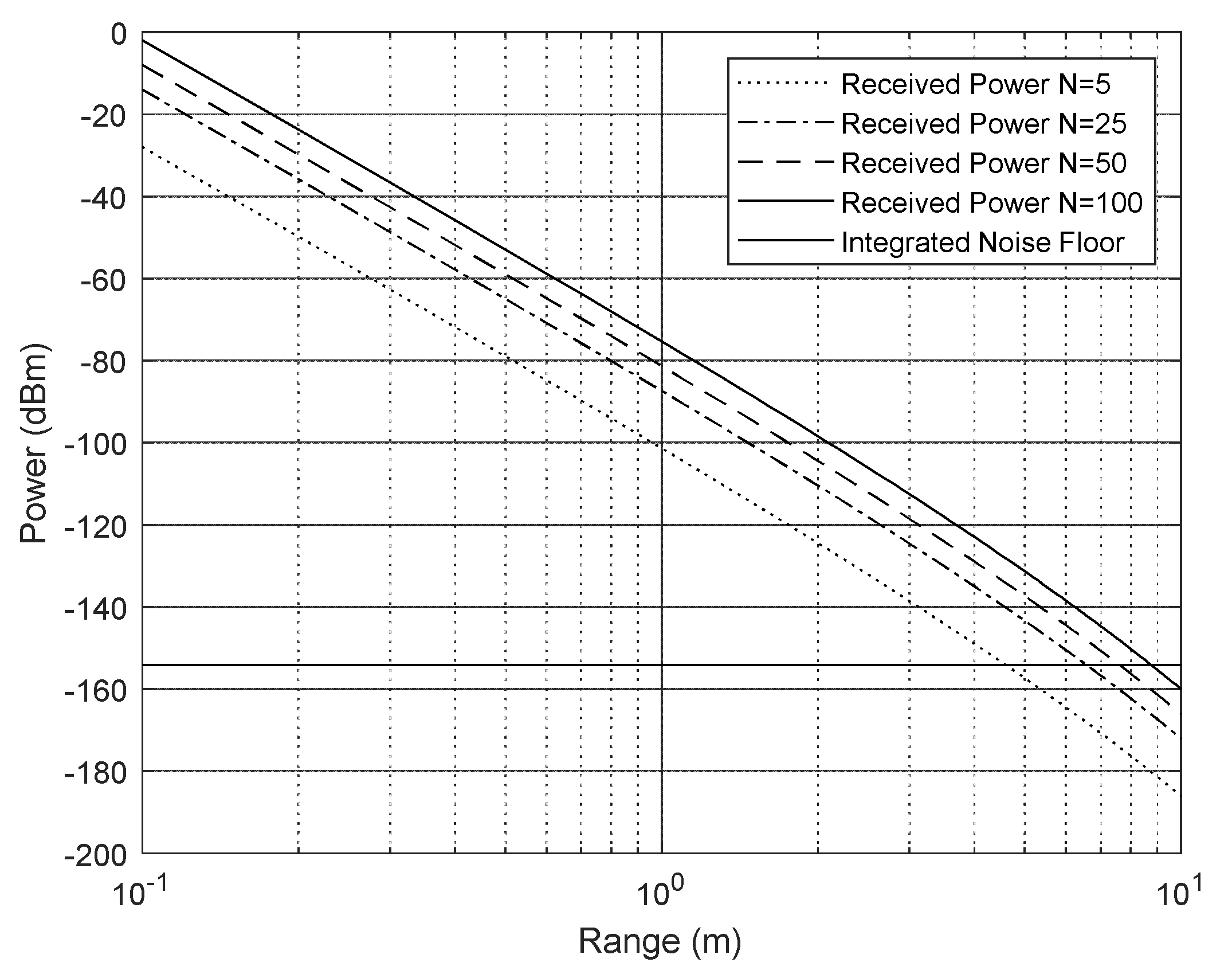
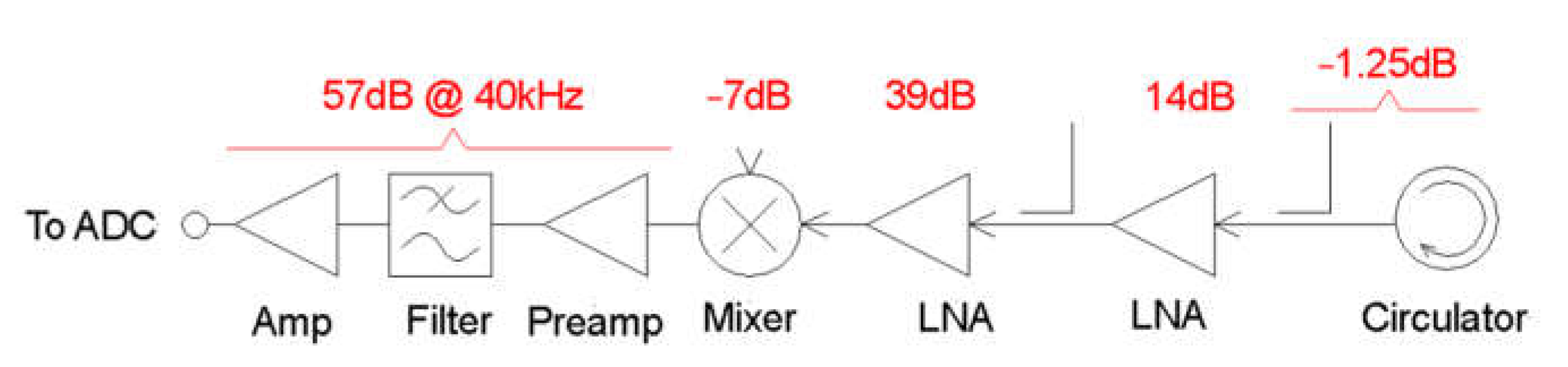
3.1.2. Radar Receiver Requirements
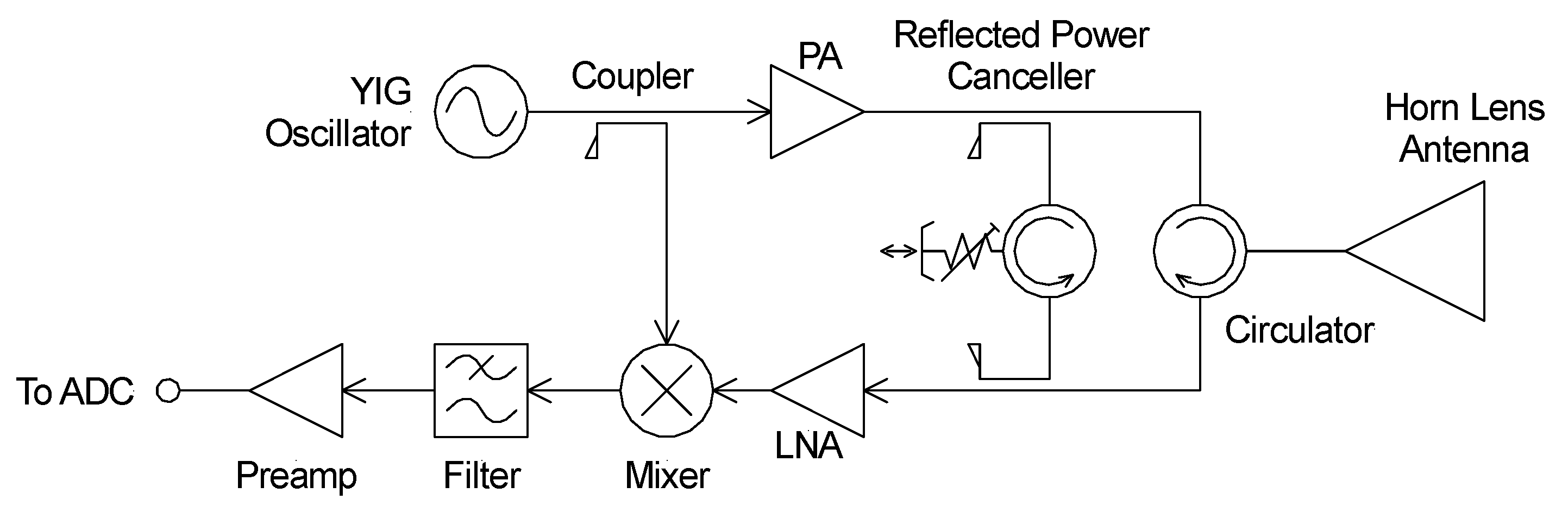
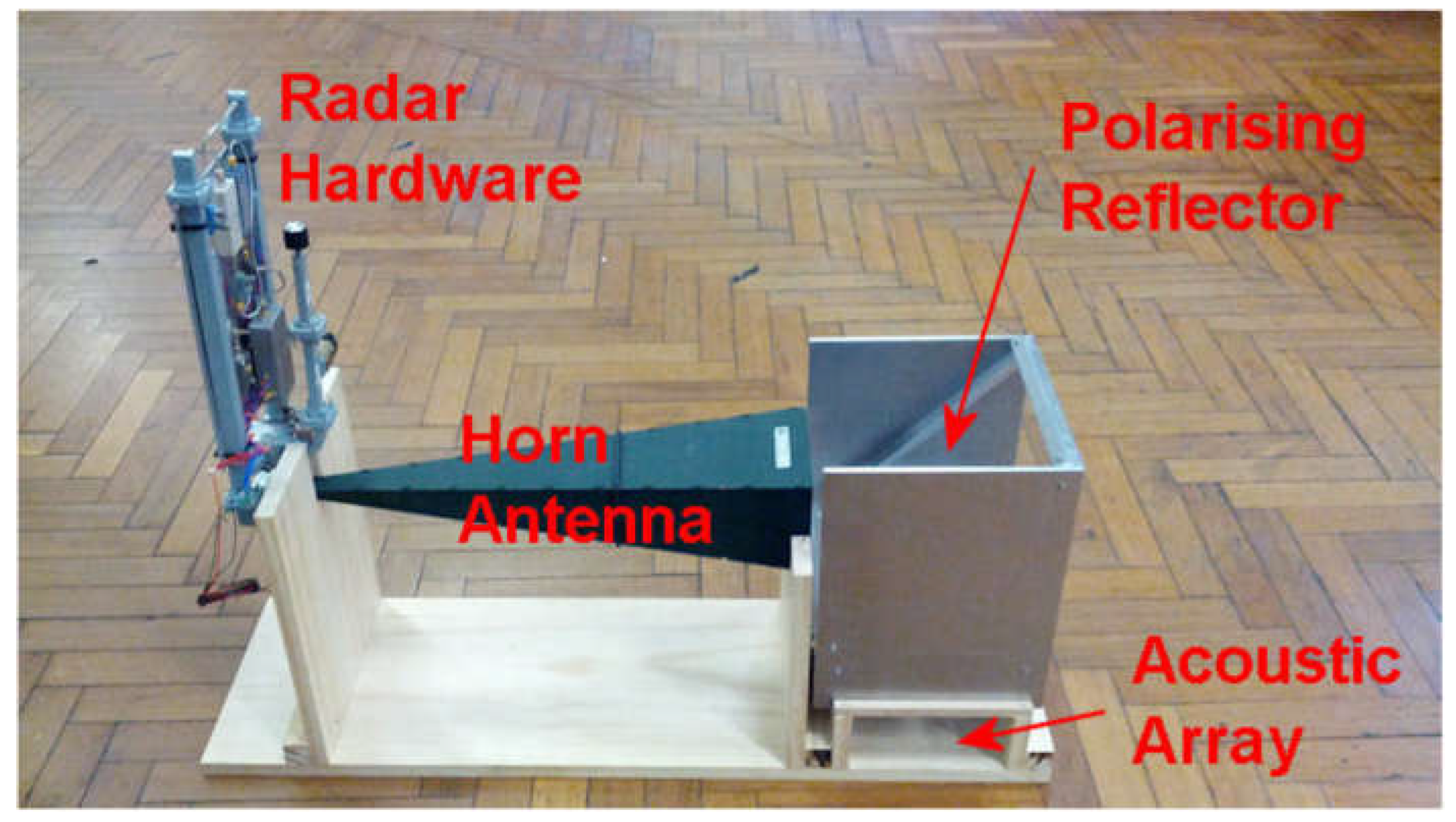
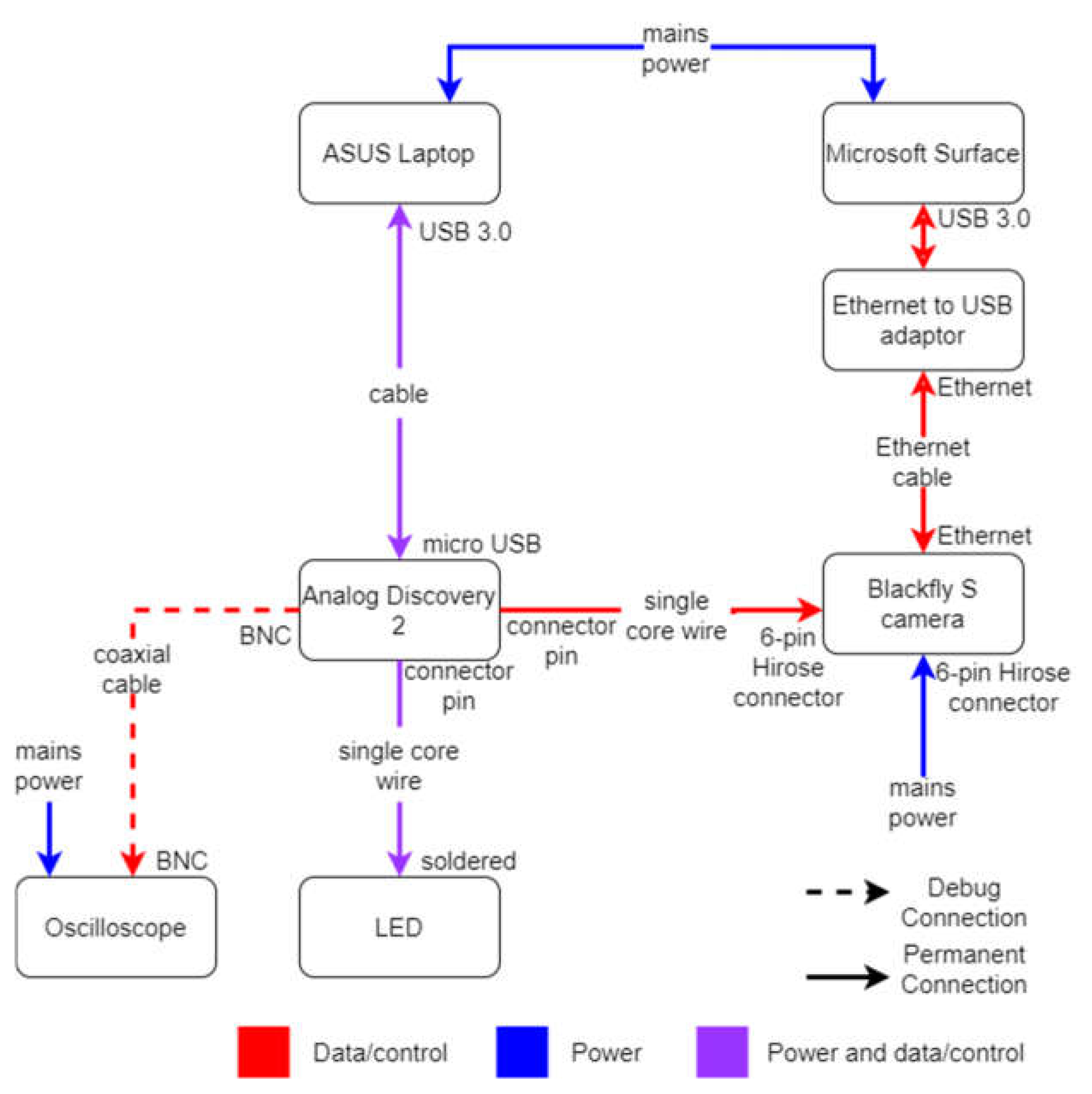
3.1.3. System Hardware
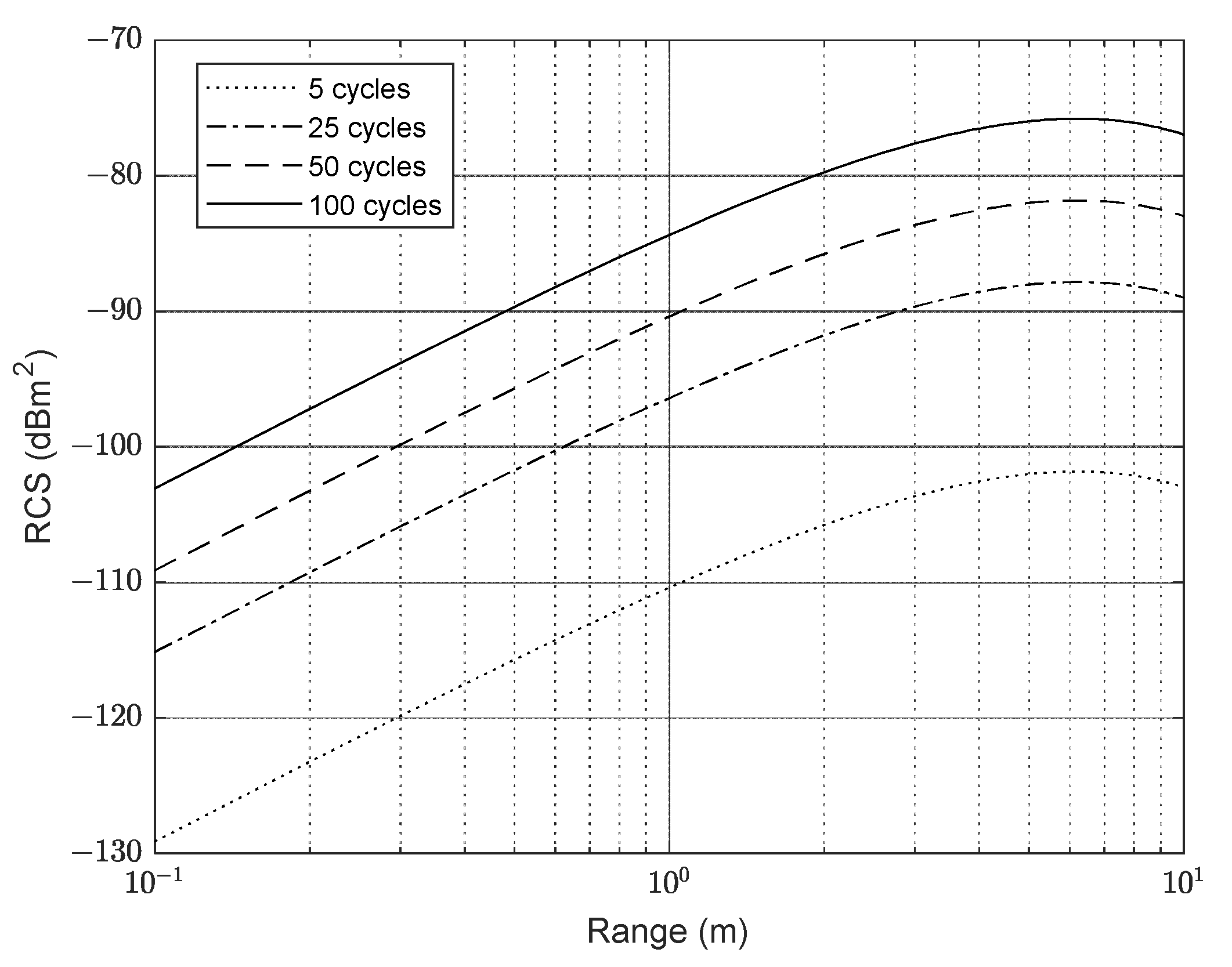
3.1.4. RASS System Calibration
3.1.5. Calibration of Turbulence Generation Methods
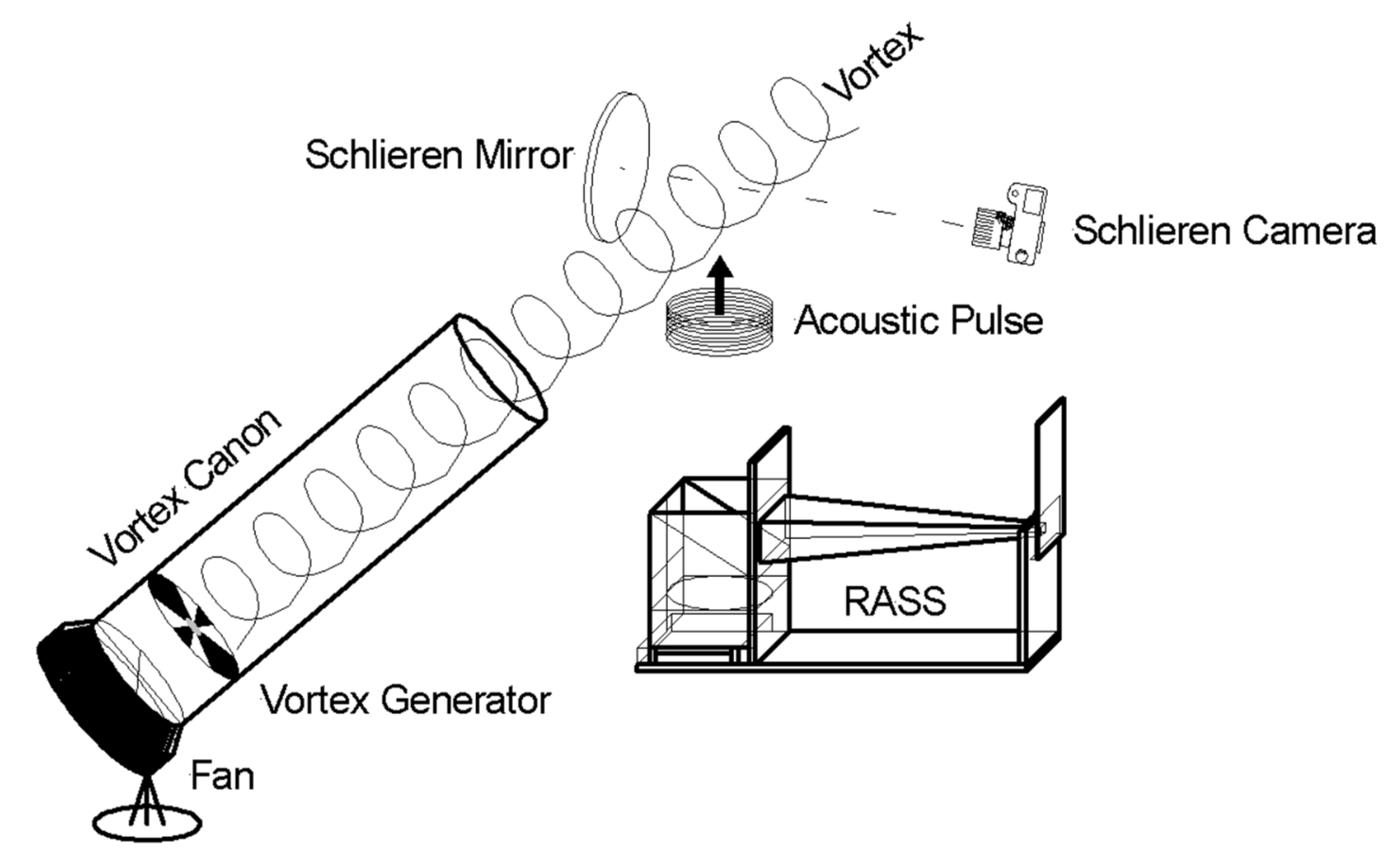
3.2. Ultrasound-Modulated Schlieren Imager
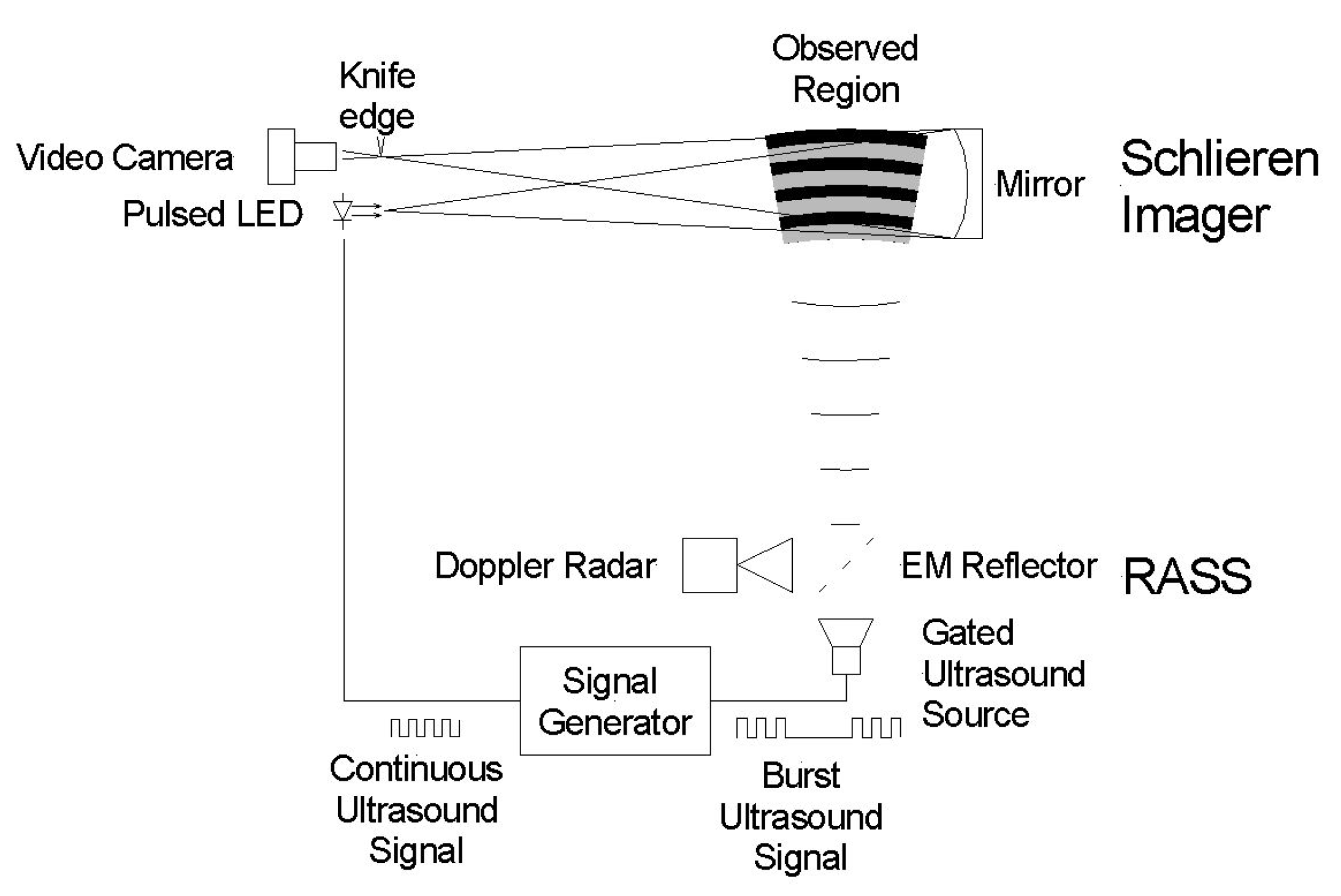
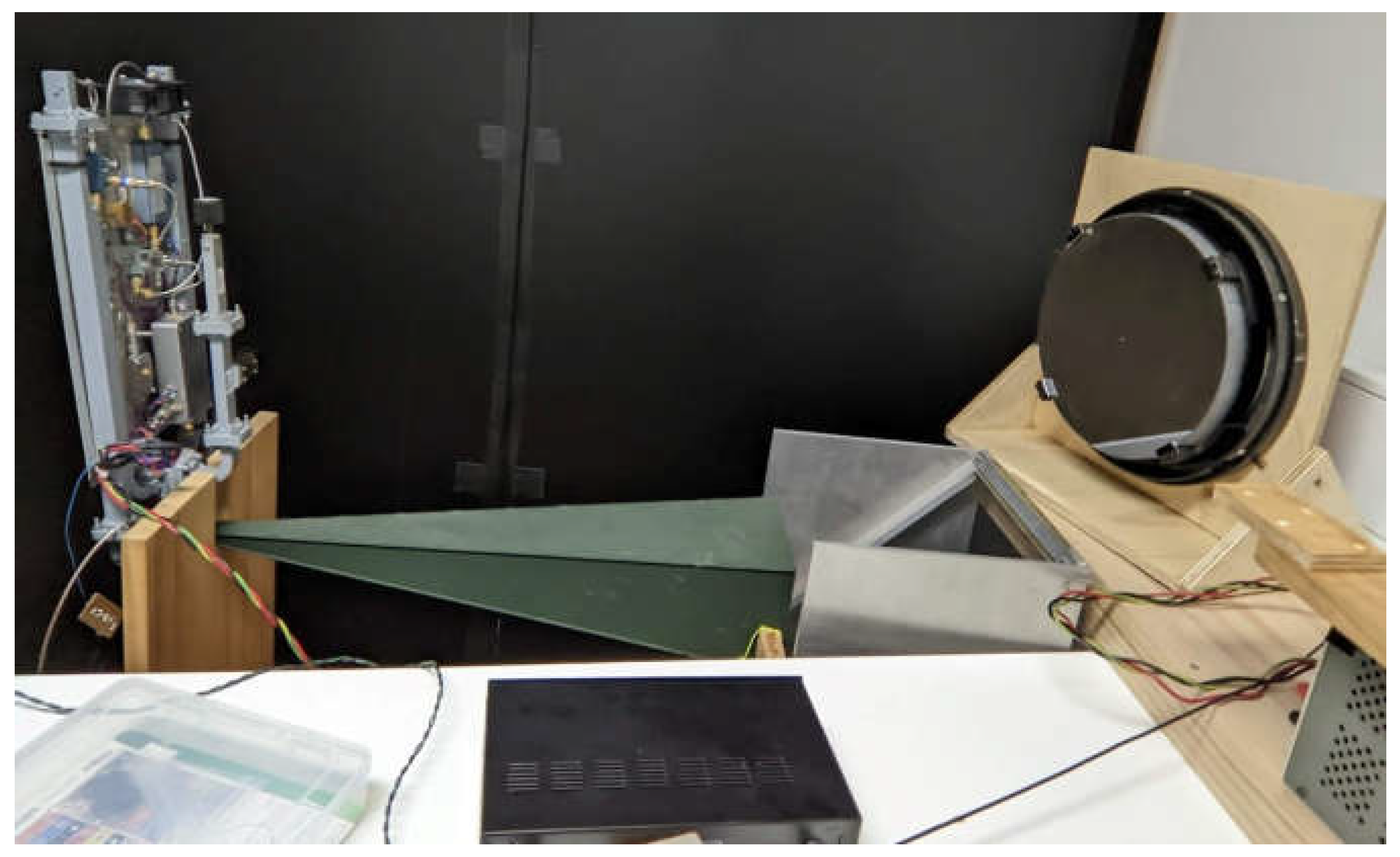
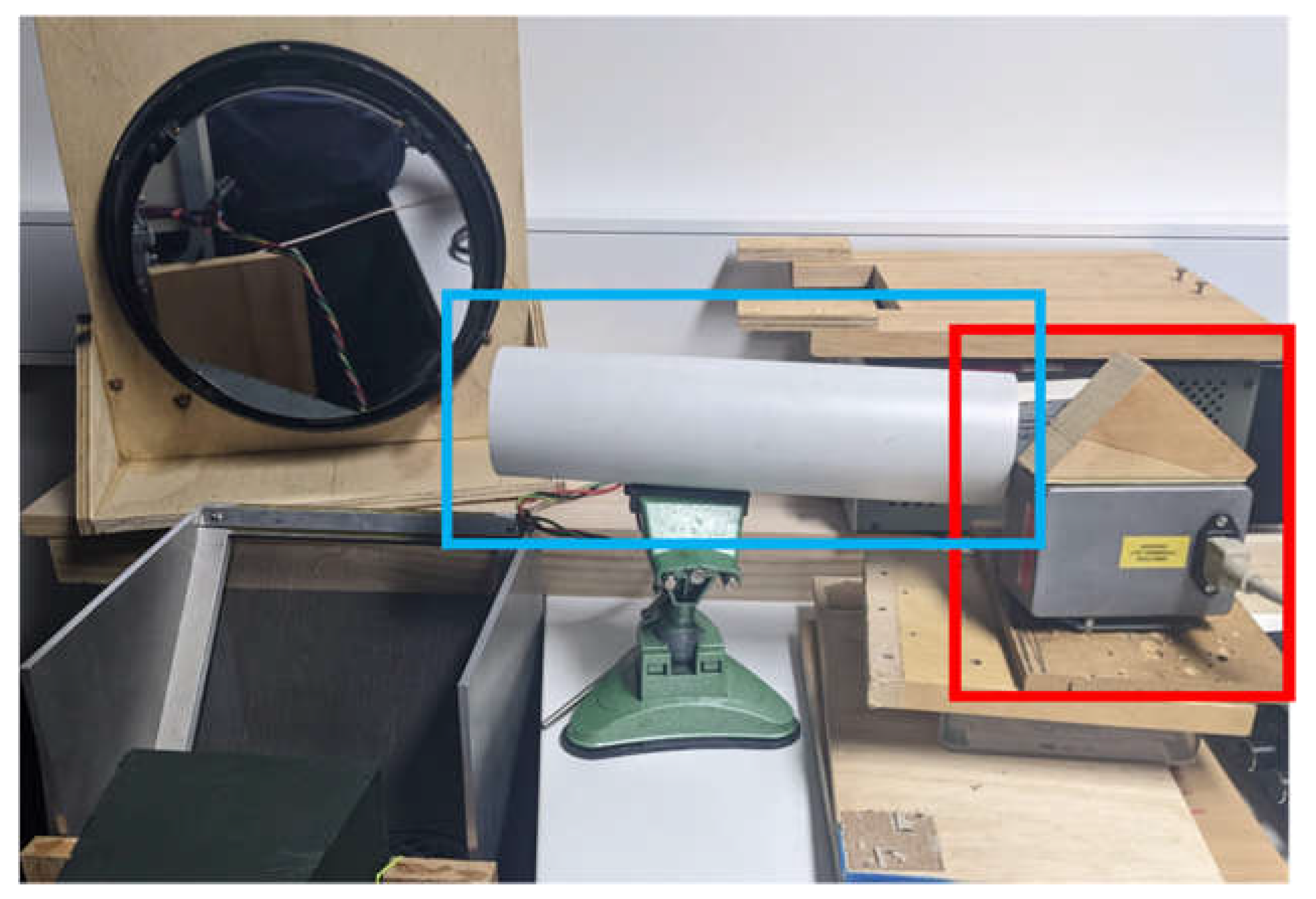
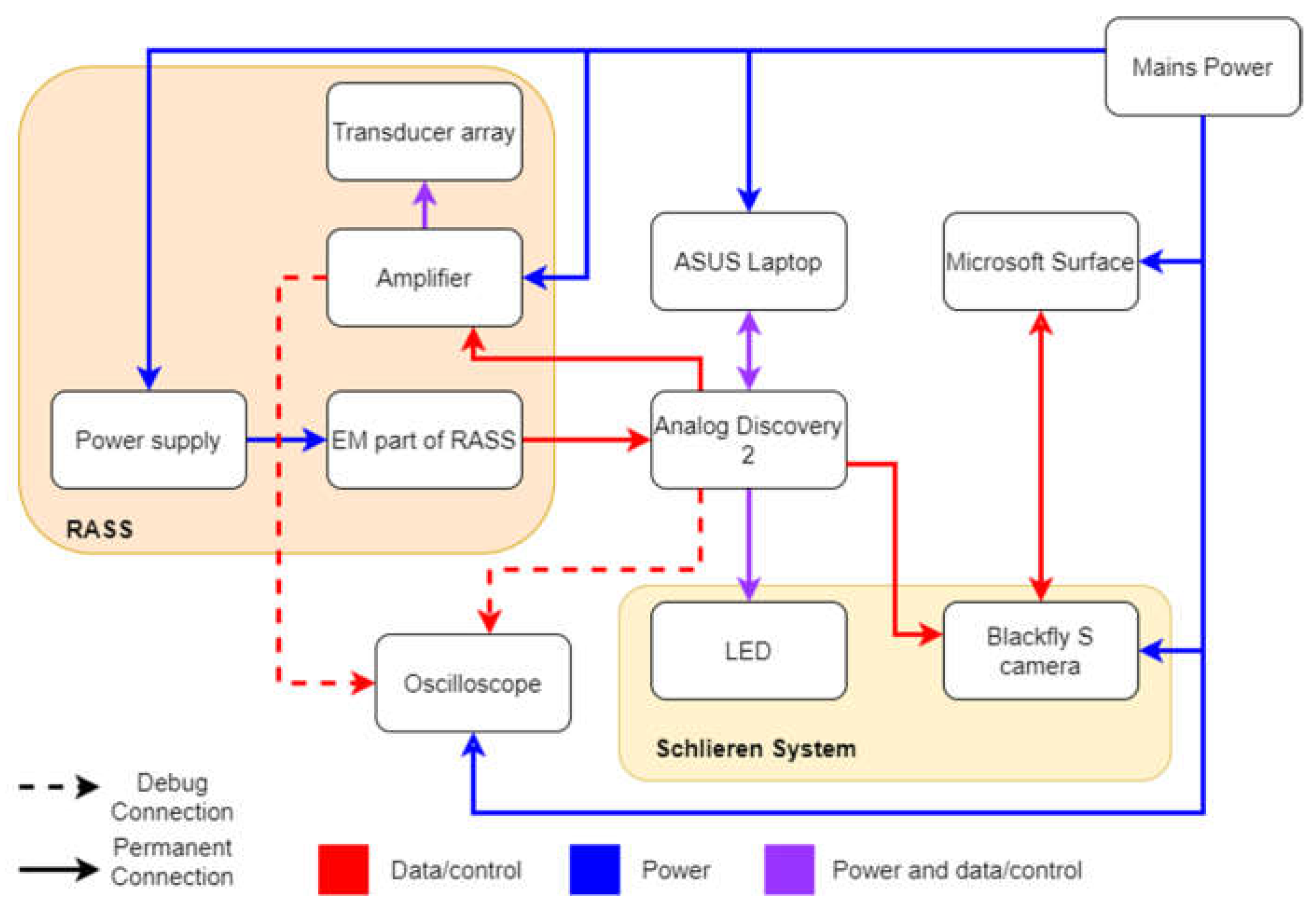
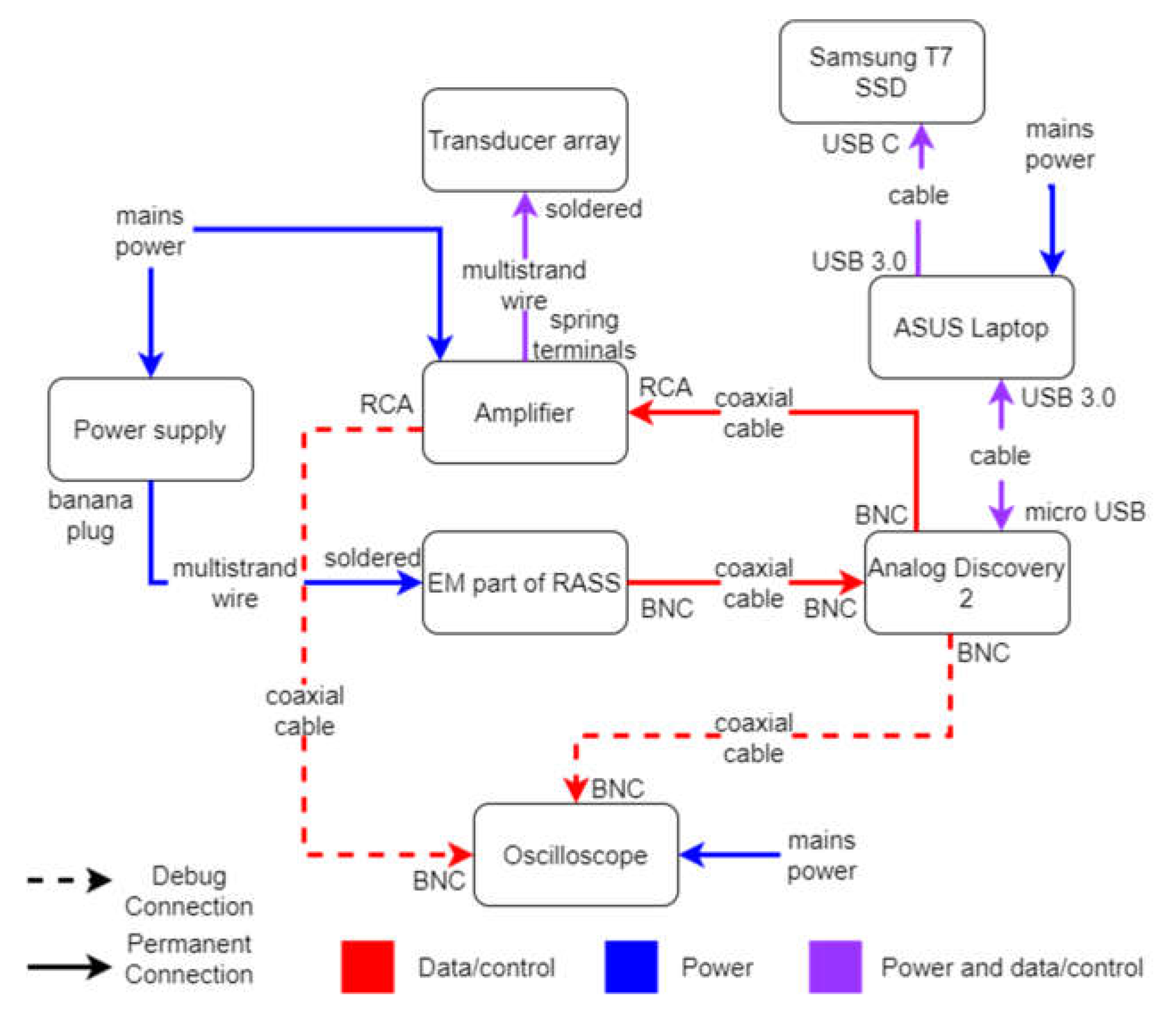
3.3. Integrated System
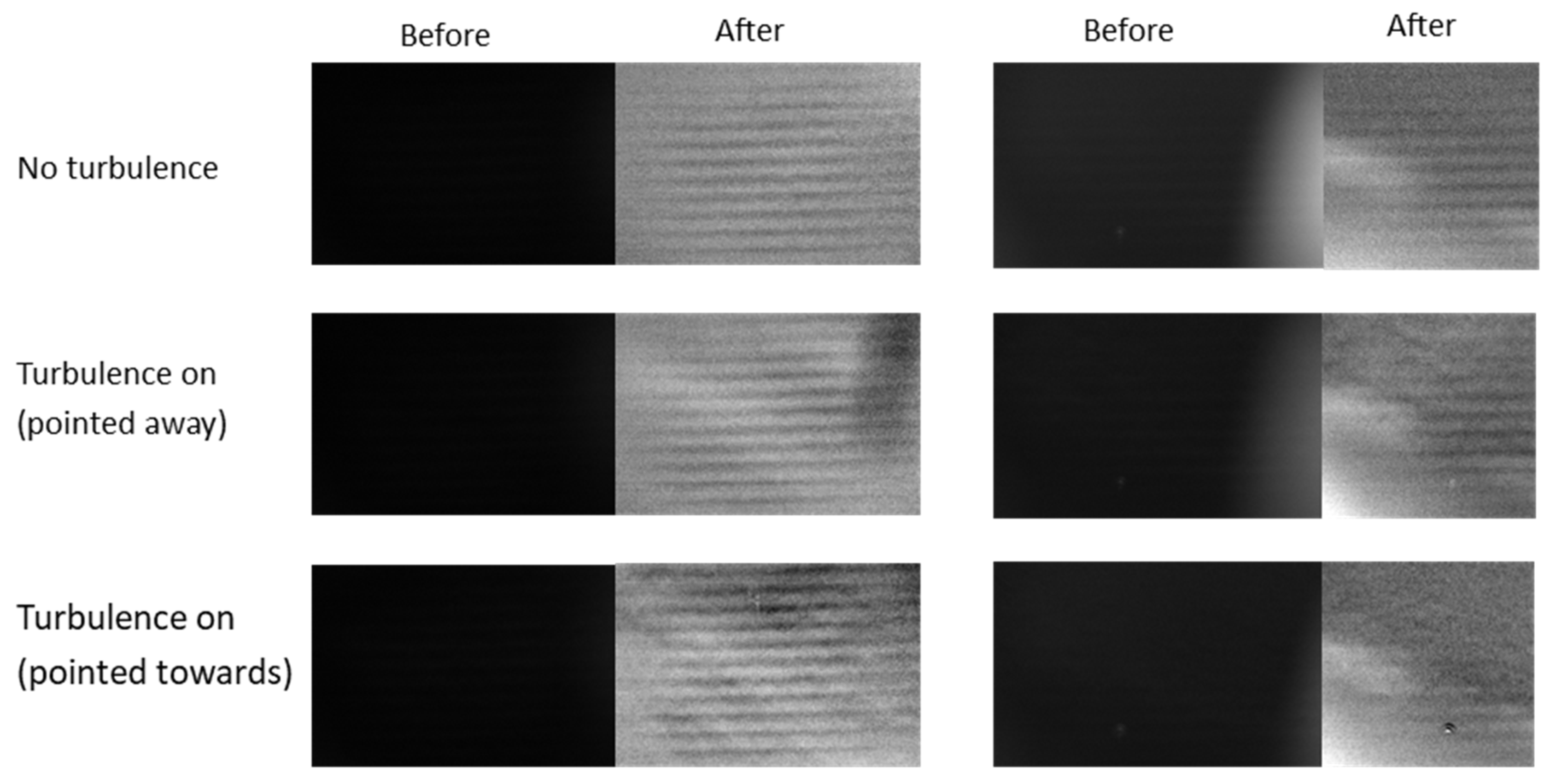
- The turbulence generator was turned on but pointed in a different direction;
- The turbulence generator was turned off.
- For all scenarios, the pipe containing the vortex generator remained in the same location, only the fan was rotated.
4. Results and Discussion
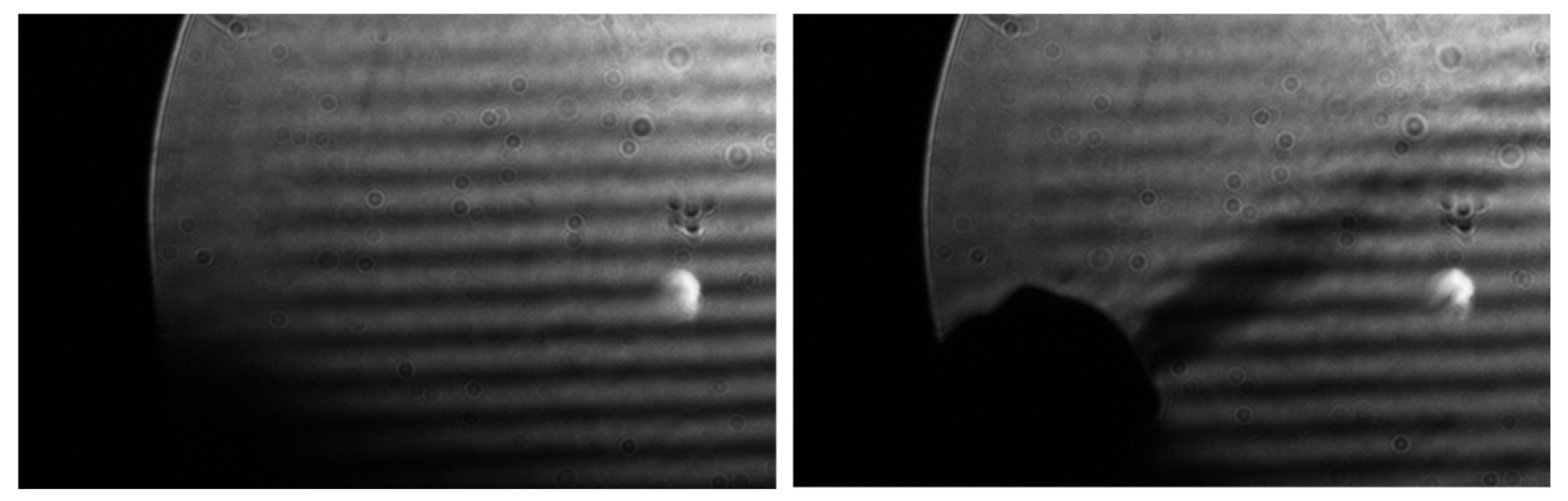
4.1. Schlieren Imager—Initial Results
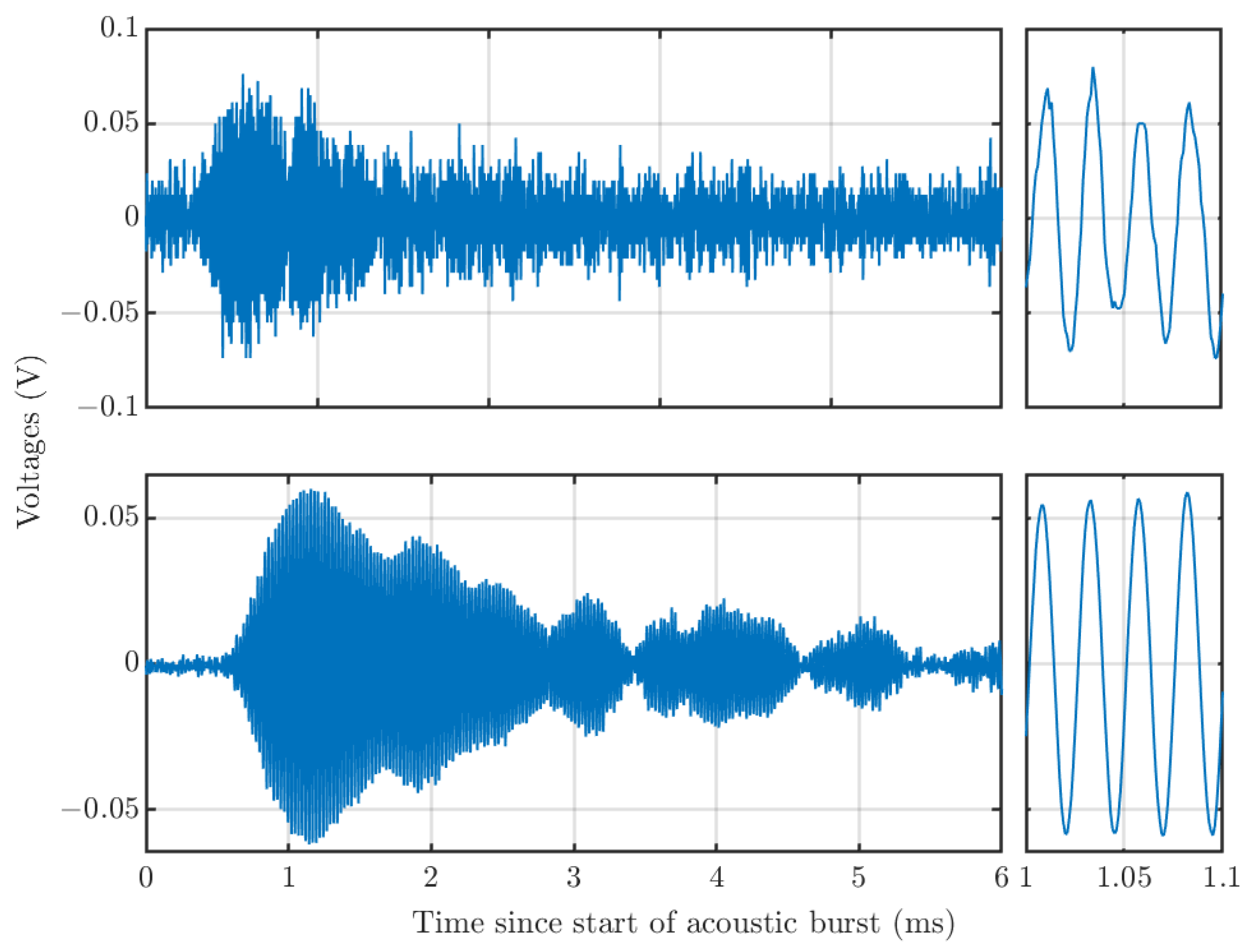
4.2. RASS
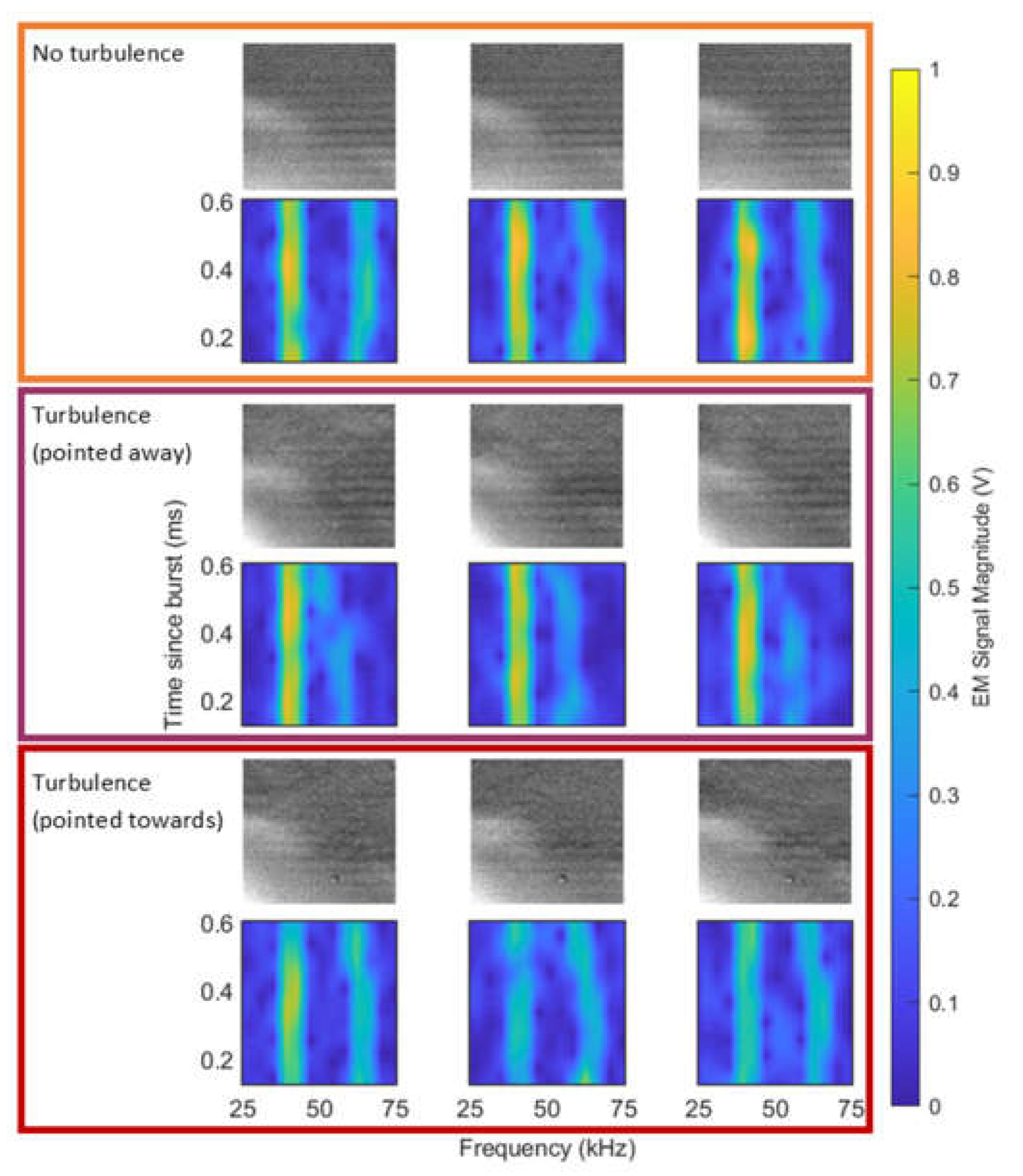
4.3. Integrated System
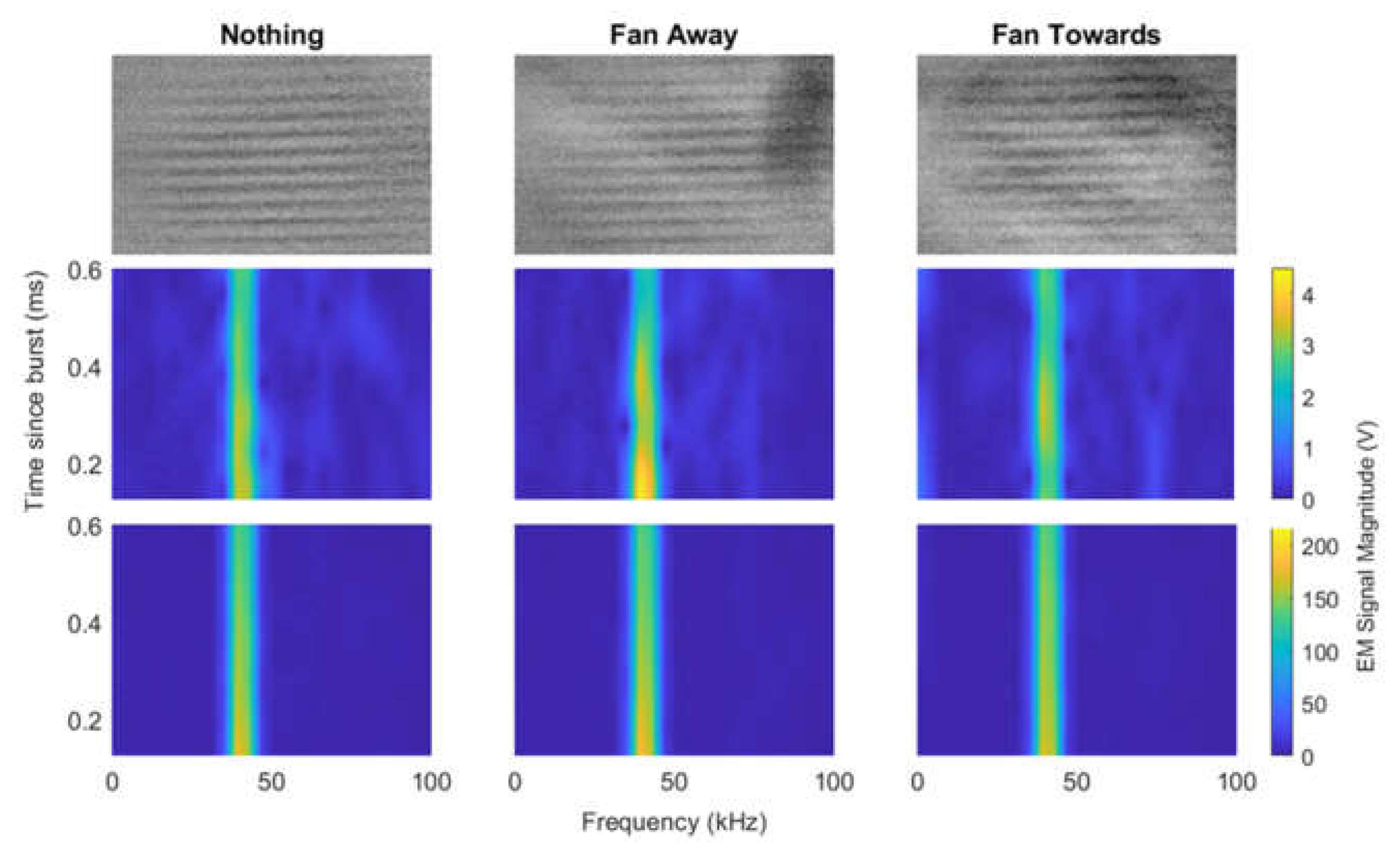
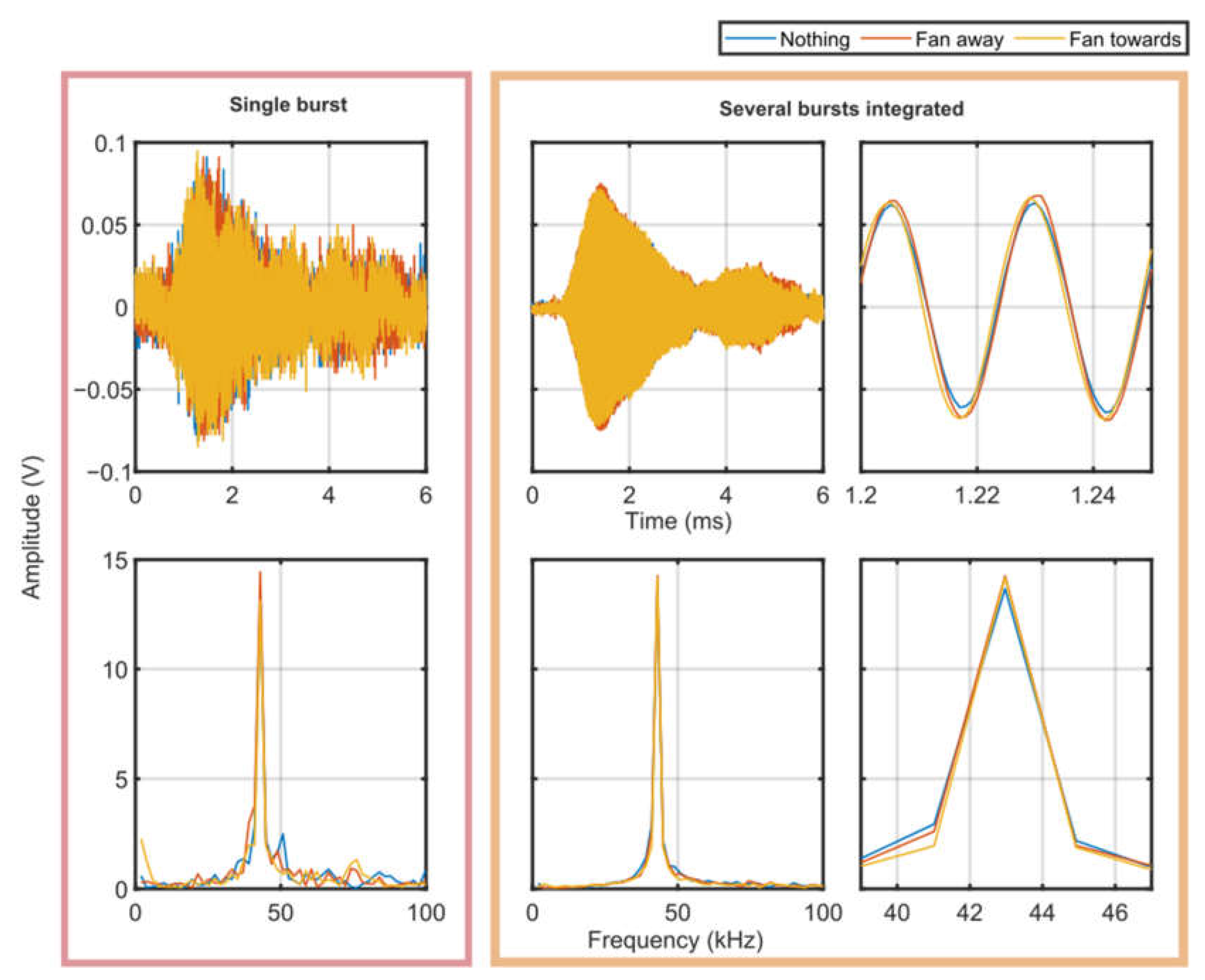
4.3.1. Using the Fan to Generate Turbulence
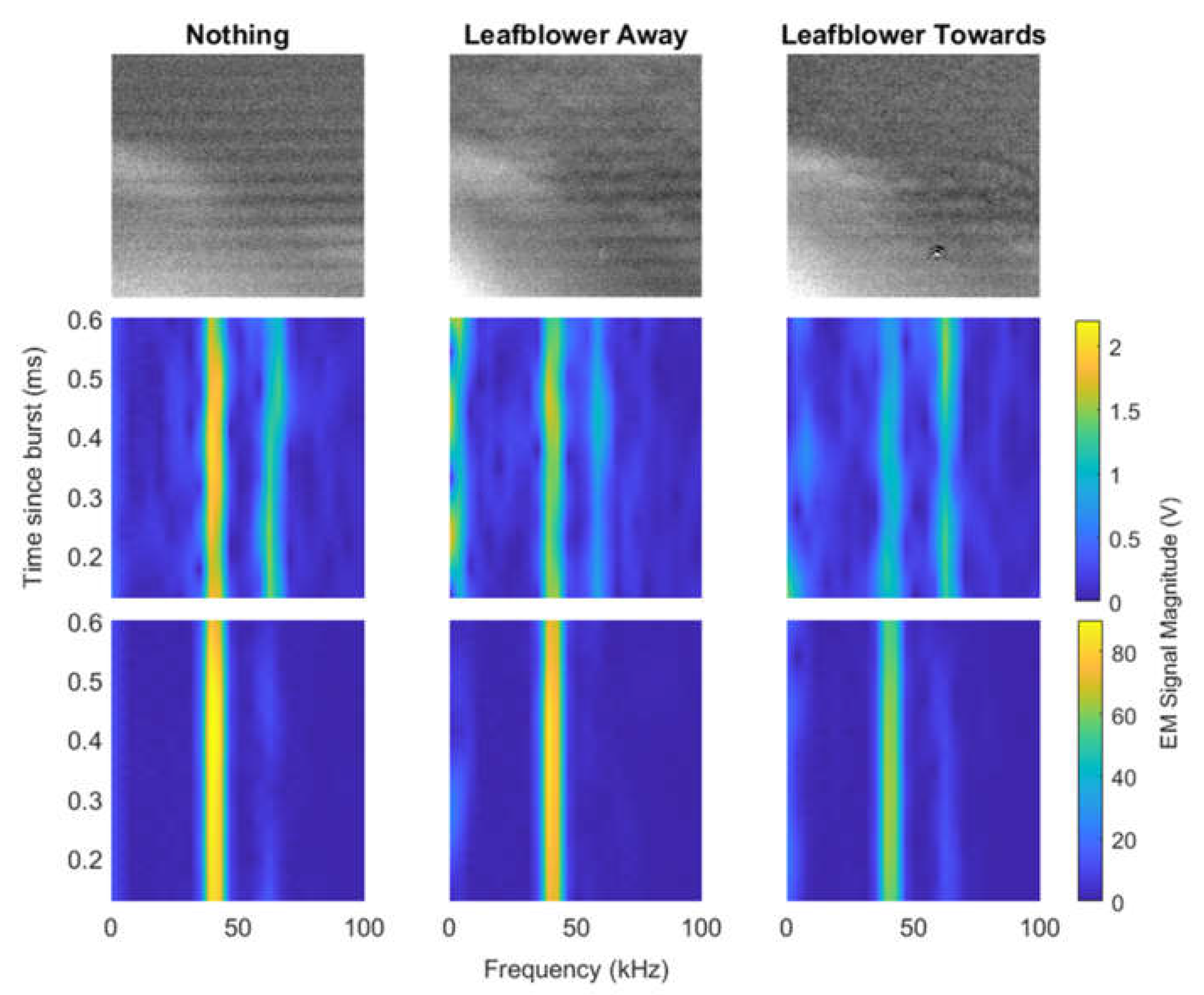
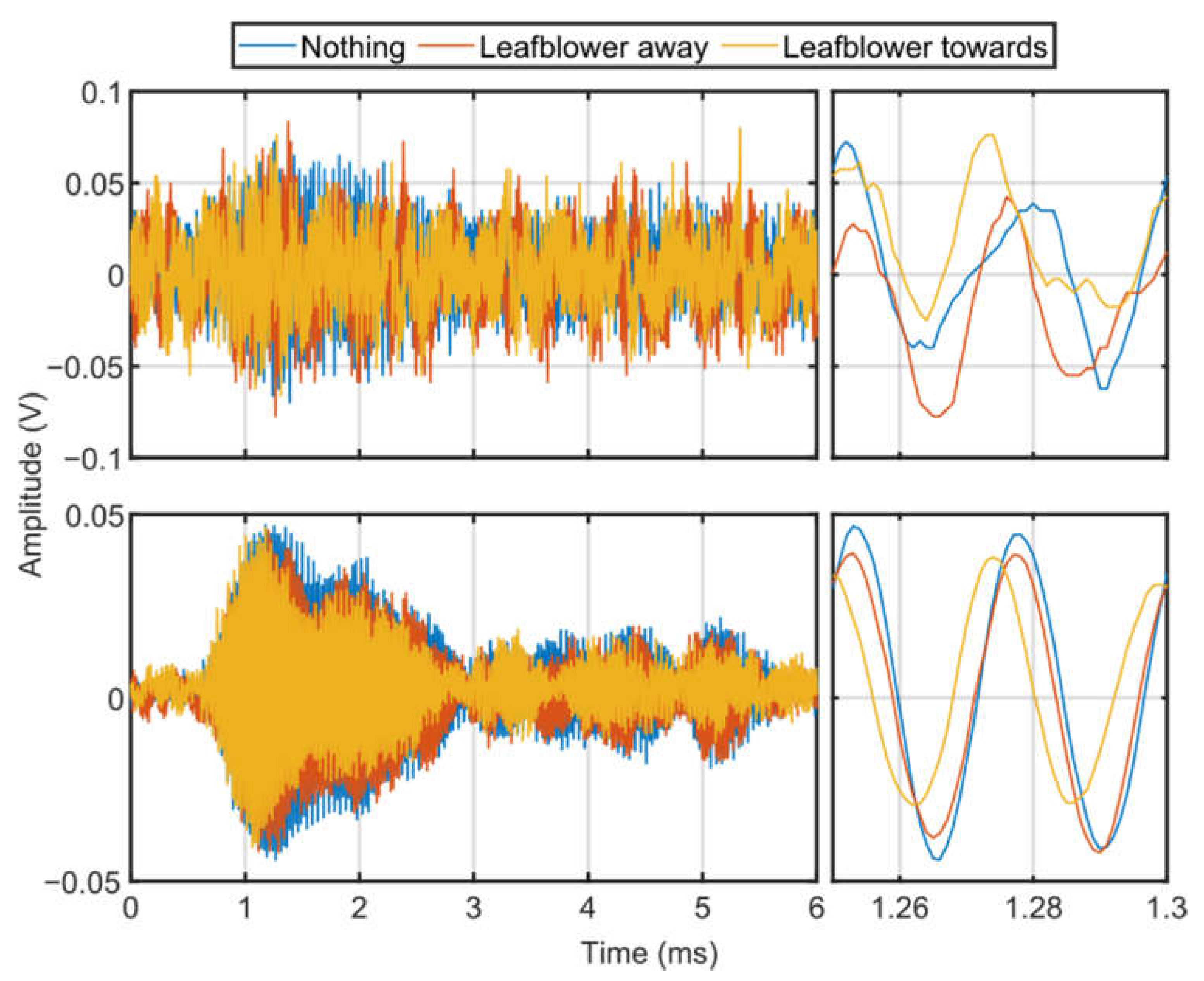
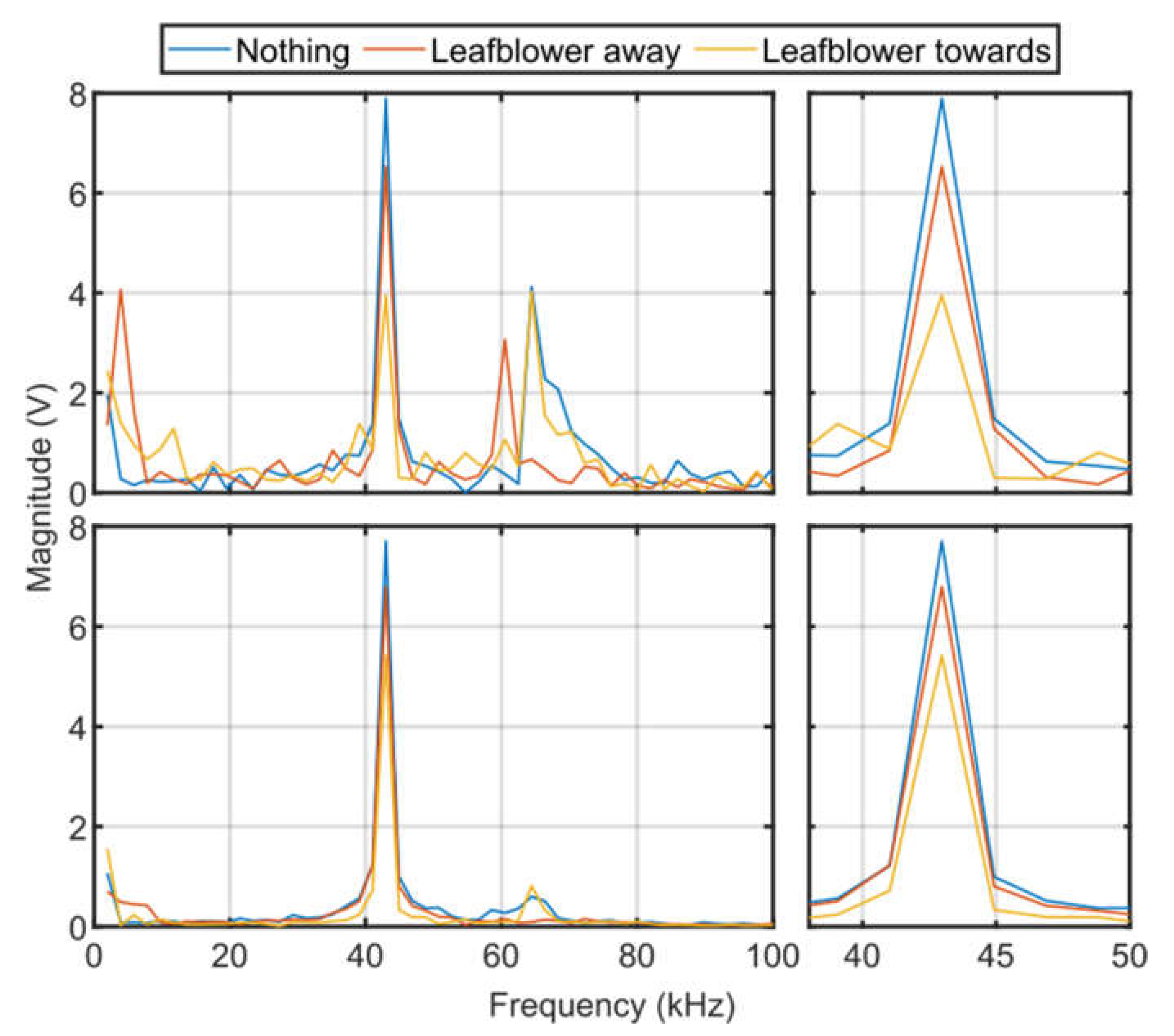
4.3.2. Using the Leaf blower to Generate Turbulence
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A




References
- Moller, M.S.; Lasson, L.B. Handling the Turbulence Case. J. Air Com. 1998, 64, 1057. [Google Scholar]
- Parker, T.J.; Lane, T.P. Trapped Mountain Waves during a Light Aircraft Accident. Aust. Meteorol. Ocean. J. 2013, 63, 377–389. [Google Scholar] [CrossRef]
- Golding, W.L. Turbulence and Its Impact on Commercial Aviation. J. Aviat. Educ. Res. 2000, 11, 8. [Google Scholar] [CrossRef]
- Zhukov, K.A.; Vyshinsky, V.V.; Rohacs, J. Effects of Atmospheric Turbulence on UAV. In Proceedings of the IFFK 2014, Budapest, Hungary, 25–27 August 2014. [Google Scholar]
- Gao, M.; Hugenholtz, C.H.; Fox, T.A.; Kucharczyk, M.; Barchyn, T.E.; Nesbit, P.R. Weather constraints on global drone flyability. Sci. Rep. 2021, 11, 12092. [Google Scholar] [CrossRef] [PubMed]
- Medagoda, E.D.; Gibbens, P.W. Multiple Horizon Model Predictive Flight Control. J. Guid. Control Dyn. 2014, 37, 946–951. [Google Scholar] [CrossRef]
- Medagoda, E.D.; Gibbens, P.W. Efficient Predictive Flight Control. In Proceedings of the ICCAS 2010, Goyang-si, Republic of Korea, 27–30 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1297–1302. [Google Scholar]
- Storer, L.N.; Gill, P.G.; Williams, P.D. Multi-Model Ensemble Predictions of Aviation Turbulence. Meteorol. Appl. 2019, 26, 416–428. [Google Scholar] [CrossRef]
- Sharman, R.; Tebaldi, C.; Wiener, G.; Wolff, J. An Integrated Approach to Mid-and Upper-Level Turbulence Forecasting. Weather Forecast. 2006, 21, 268–287. [Google Scholar] [CrossRef]
- Mizuno, S.; Ohba, H.; Ito, K. Machine Learning-Based Turbulence-Risk Prediction Method for the Safe Operation of Aircrafts. J. Big Data 2022, 9, 1–16. [Google Scholar] [CrossRef]
- Jang, Y.; Huh, J.; Lee, N.; Lee, S.; Park, Y. Comparative Study on the Prediction of Aerodynamic Characteristics of Aircraft with Turbulence Models. Int. J. Aeronaut. Space Sci. 2018, 19, 13–23. [Google Scholar] [CrossRef]
- Japan Aerospace Exploration Agency, JAXA’s Clear-Air Turbulence Detection System Successfully Flight Demonstrated 2017. Available online: https://www.aero.jaxa.jp/eng/research/star/safeavio/news170313.html (accessed on 22 April 2022).
- Peters, G. History of RASS and Its Use for Turbulence Measurements. In Proceedings of the IGARSS IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment. Proceedings (Cat. No. 00CH37120), Honolulu, HI, USA, 24–28 July 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 3, pp. 1183–1185. [Google Scholar]
- Degen, N. An Overview on Schlieren Optics and Its Applications: Studies on Mechatronics. 2012. ETH-Zürich. Published Working Paper. Available online: https://doi.org/10.3929/ethz-a-010208451 (accessed on 25 May 2022).
- Rienitz, J. Schlieren Experiment 300 Years Ago. Nature 1975, 254, 293–295. [Google Scholar] [CrossRef]
- Settles, G.S. Schlieren and Shadowgraph Techniques: Visualizing Phenomena in Transparent Media; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Skolnik, M. Introduction to Radar Systems, 2nd ed.; McGraw-Hill Kogakusha: Tokyo, Japan, 1980. [Google Scholar]
- Tonning, A. Scattering of Electromagnetic Waves by an Acoustic Disturbance in the Atmosphere. Appl. Sci. Res. 1957, B6, 401–421. [Google Scholar] [CrossRef]
- Bhatnagar, N.; Peterson, A. Interaction of Electromagnetic and Acoustic Waves in a Stochastic Atmosphere. IEEE Trans. Antennas Propag. 1979, AP-27, 385–393. [Google Scholar] [CrossRef]
- Frankel, M.; Chang, N.; Sanders, M., Jr. A High-Frequency Radio Acoustic Sounder for Remote Measurement of Atmospheric Winds and Temperature. Bull. Am. Meterological Soc. 1977, 58, 928–933. [Google Scholar] [CrossRef]
- Marshall, J.; Peterson, A.; Barnes, A., Jr. Combined Radar Acoustic Sounding System. Appl. Opt. 1972, 11, 108–112. [Google Scholar] [CrossRef] [PubMed]
- Daas, M.; Knochel, R. Microwave-Acoustic Measurement System for Remote Temperature Profiling in Closed Environments. In Proceedings of the 1992 22nd European Microwave Conference, Helsinki, Finland, 5–9 September 1992; IEEE: Helsinki, Finland, 1992; pp. 1225–1230. [Google Scholar]
- Weiss, M.; Knochel, R. A Monostatic Radio-Acoustic Sounding System. IEEE MTT-Dig. 1999, THF4-9, 1871–1874. [Google Scholar] [CrossRef]
- Weiss, M.; Knochel, R. A Monostatic Radio-Acoustic Sounding System Used as an Indoor Remote Temperature Profiler. IEEE Trans. Instrum. Meas. 2001, 50, 1043–1047. [Google Scholar] [CrossRef]
- Saffold, J.; Williamson, F.; Ahuja, K.; Stein, L.; Muller, M. Radar-Acoustic Interaction for IFF Applications. In Proceedings of the 1999 IEEE Radar Conference. Radar into the Next Millennium (Cat. No.99CH36249), Waltham, MA, USA, 22 April 1999; pp. 198–202. [Google Scholar]
- Hanson, J.M.; Marcotte, F.J. Aircraft Wake Vortex Detection Using Contiunous-Wave Radar. Johns. Hopkins Apl. Tech. Dig. 1997, 18, 349. [Google Scholar]
- Marshall, R. Wingtip Generated Wake Vortices as Radar Targets. IEEE AES Syst. Mag. 1996, 11, 27–30. [Google Scholar] [CrossRef]
- Settles, G.S.; Hargather, M.J. A Review of Recent Developments in Schlieren and Shadowgraph Techniques. Meas. Sci. Technol. 2017, 28, 042001. [Google Scholar] [CrossRef]
- Traldi, E.; Boselli, M.; Simoncelli, E.; Stancampiano, A.; Gherardi, M.; Colombo, V.; Settles, G.S. Schlieren Imaging: A Powerful Tool for Atmospheric Plasma Diagnostic. EPJ Tech. Instrum. 2018, 5, 1–23. [Google Scholar] [CrossRef]
- Kumar, R.; Kaura, S.K.; Chhachhia, D.; Mohan, D.; Aggarwal, A. Comparative Study of Different Schlieren Diffracting Elements. Pramana 2008, 70, 121–129. [Google Scholar] [CrossRef]
- Dalziel, S.B.; Hughes, G.O.; Sutherland, B.R. Synthetic Schlieren. In Proceedings of the 8th International Symposium on Flow Visualization, Sorrento, Italy, 1–4 September 1998; Volume 62. [Google Scholar]
- Meier; Gerd, E.A. Hintergrund-Schlierenmeßverfahren. Deutsche Patentanmeldung DE 199 42 856 A1, 8 September 1999. [Google Scholar]
- Wildeman, S. Real-Time Quantitative Schlieren Imaging by Fast Fourier Demodulation of a Checkered Backdrop. Exp. Fluids 2018, 59, 1–13. [Google Scholar] [CrossRef]
- Narayan, S.; Srivastava, A.; Singh, S. Rainbow Schlieren-Based Direct Visualization of Thermal Gradients around Single Vapor Bubble during Nucleate Boiling Phenomena of Water. Int. J. Multiph. Flow. 2019, 110, 82–95. [Google Scholar] [CrossRef]
- Hargather, M.J.; Settles, G.S. A Comparison of Three Quantitative Schlieren Techniques. Opt. Lasers Eng. 2012, 50, 8–17. [Google Scholar] [CrossRef]
- Greenberg, P.S.; Klimek, R.B.; Buchele, D.R. Quantitative Rainbow Schlieren Deflectometry. Appl. Opt. 1995, 34, 3810–3825. [Google Scholar] [CrossRef] [PubMed]
- Bershader, D.; Prakash, S.; Huhn, G. Improved Flow Visualization by Use of Resonant Refractivity. In Proceedings of the 14th Aerospace Sciences Meeting, Washington, DC, USA, 26–28 January 1976; p. 71. [Google Scholar]
- Crockett, A.; Rueckner, W. Visualizing Sound Waves with Schlieren Optics. Am. J. Phys. 2018, 86, 870–876. [Google Scholar] [CrossRef]
- Kudo, N.; Ouchi, H.; Yamamoto, K.; Sekimizu, H. A Simple Schlieren System for Visualizing a Sound Field of Pulsed Ultrasound. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2004; Volume 1, p. 033. [Google Scholar]
- Azuma, T.; Tomozawa, A.; Umemura, S. Observation of Ultrasonic Wavefronts by Synchronous Schlieren Imaging. Jpn. J. Appl. Phys. 2002, 41, 3308. [Google Scholar] [CrossRef]
- Hargather, M.J.; Settles, G.S.; Madalis, M.J. Schlieren Imaging of Loud Sounds and Weak Shock Waves in Air near the Limit of Visibility. Shock. Waves 2010, 20, 9–17. [Google Scholar] [CrossRef]
- Chitanont, N.; Yatabe, K.; Ishikawa, K.; Oikawa, Y. Spatio-Temporal Filter Bank for Visualizing Audible Sound Field by Schlieren Method. Appl. Acoust. 2017, 115, 109–120. [Google Scholar] [CrossRef]
- Schwartz, D.S.; Russo, A.L. Schlieren Photographs of Sound Fields. J. Appl. Phys. 1953, 24, 1061–1062. [Google Scholar] [CrossRef]
- Veith, S.I.; Friege, G. Making Sound Visible—A Simple Schlieren Imaging Setup for Schools. Phys. Educ. 2021, 56, 025024. [Google Scholar] [CrossRef]
- Por, E.; van Kooten, M.; Sarkovic, V. Nyquist–Shannon Sampling Theorem; Leiden University: Leiden, The Netherlands, 2019. [Google Scholar]
- Kinster, L.; Frey, A. Fundamentals of Acoustics, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1962. [Google Scholar]
- Burnside, N. A Function That Returns the Atmospheric Attenuation of Sound 2004. Available online: https://uk.mathworks.com/matlabcentral/fileexchange/6000-atmospheric-attenuation-of-sound (accessed on 1 October 2023).
- Brooker, G.; Martinez, J.; Robertson, D.A. A High Resolution Radar-Acoustic Sensor for Detection of Close-in Air Turbulence. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, Australia, 27–31 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Brooker, G.M. An Adjustable Radar Cross Section Doppler Calibration Target. Sens. J. IEEE 2015, 15, 476–482. [Google Scholar] [CrossRef]
- Teledyne FLIR, Blackfly PGE Technical Reference 2020. Available online: https://www.restarcc.com/dcms_media/other/BFLY-PGE-Technical-Reference-min.pdf (accessed on 29 April 2022).
- Teledyne FLIR. Spinnaker SDK, version 2.7.0.128; FLIR Integrated Imaging Solutions; Teledyne FLIR: Wilsonville, OR, USA, 2022.
- Shepherd, R.; Wensley, L.M.D. The Moiré-Fringe Method of Displacement Measurement Applied to Indirect Structural-Model Analysis. Exp. Mech. 1965, 5, 167–176. [Google Scholar] [CrossRef]
- Neumann, T.; Ermert, H. Schlieren Visualization of Ultrasonic Wave Fields with High Spatial Resolution. Ultrasonics 2006, 44, e1561–e1566. [Google Scholar] [CrossRef] [PubMed]
- Bunjong, D.; Pussadee, N.; Wattanakasiwich, P. Optimized Conditions of Schlieren Photography. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2018; Volume 1144, p. 012097. [Google Scholar]
- Heineck, J.T.; Banks, D.W.; Smith, N.T.; Schairer, E.T.; Bean, P.S.; Robillos, T. Background-Oriented Schlieren Imaging of Supersonic Aircraft in Flight. AIAA J. 2021, 59, 11–21. [Google Scholar] [CrossRef]
























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gordon, S.; Brooker, G. Using Schlieren Imaging and a Radar Acoustic Sounding System for the Detection of Close-in Air Turbulence. Sensors 2023, 23, 8255. https://doi.org/10.3390/s23198255
Gordon S, Brooker G. Using Schlieren Imaging and a Radar Acoustic Sounding System for the Detection of Close-in Air Turbulence. Sensors. 2023; 23(19):8255. https://doi.org/10.3390/s23198255
Chicago/Turabian StyleGordon, Samantha, and Graham Brooker. 2023. "Using Schlieren Imaging and a Radar Acoustic Sounding System for the Detection of Close-in Air Turbulence" Sensors 23, no. 19: 8255. https://doi.org/10.3390/s23198255