


Research on Simultaneous Measurement of Magnetic Field and Temperature Based on Petaloid Photonic Crystal Fiber Sensor
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Magnetic Fluid
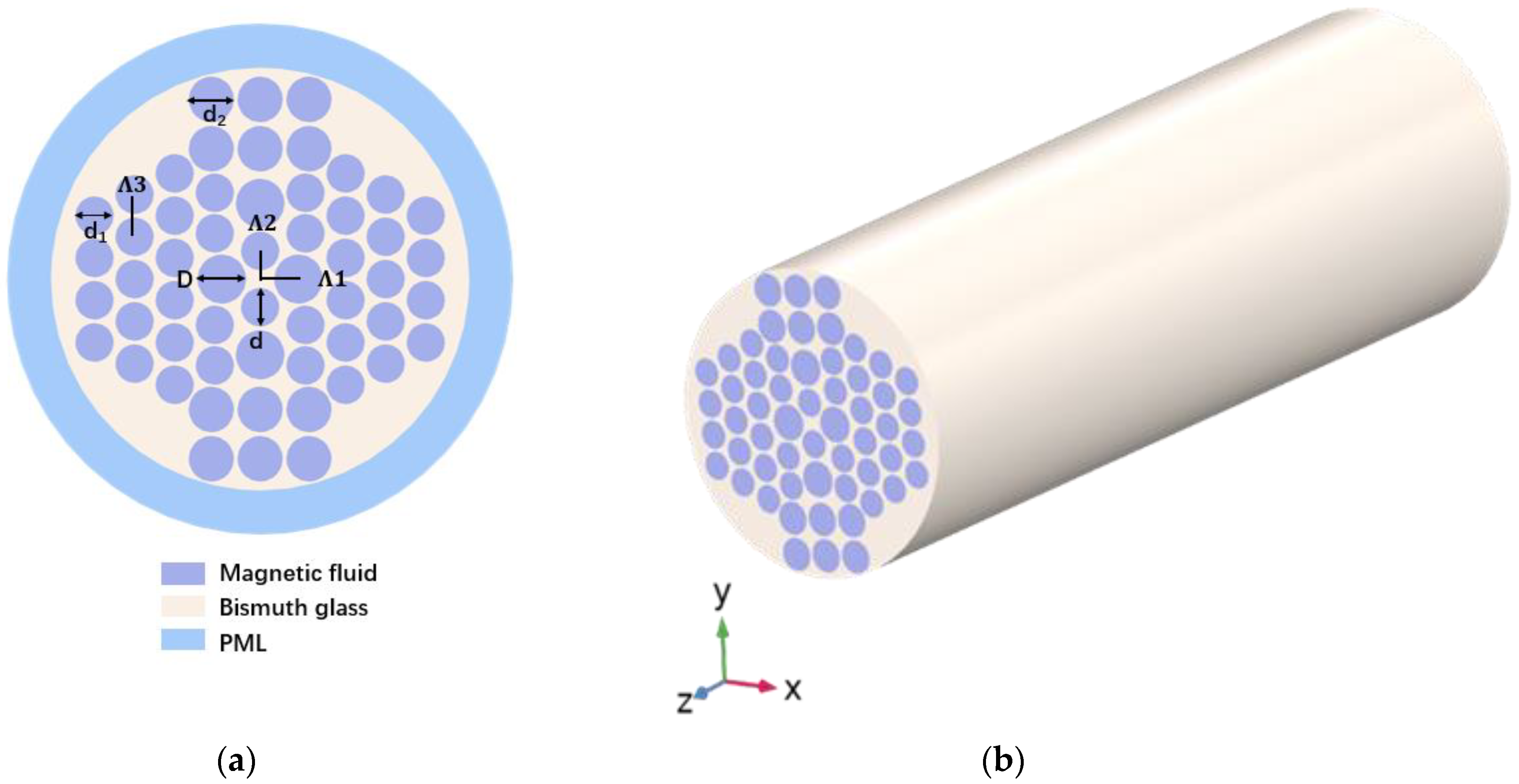
2.2. The Proposed Model of Petaloid PCF
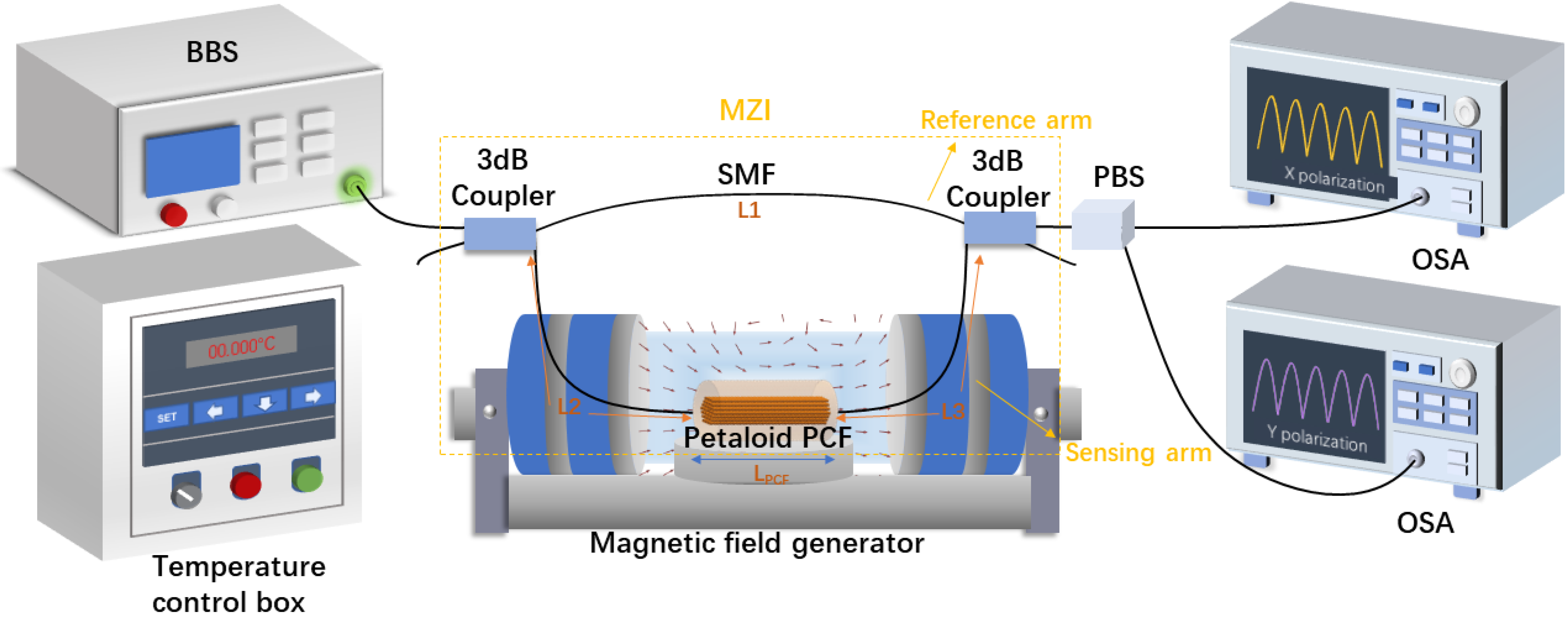
2.3. Optical Path Structure Design of Sensor
3. Results and Discussion
3.1. The Design of The Petaloid PCF
3.1.1. Effect of Pore Size on PCF Performance
3.1.2. Effect of Hole Spacing on PCF Performance
3.2. Interference Structure Design
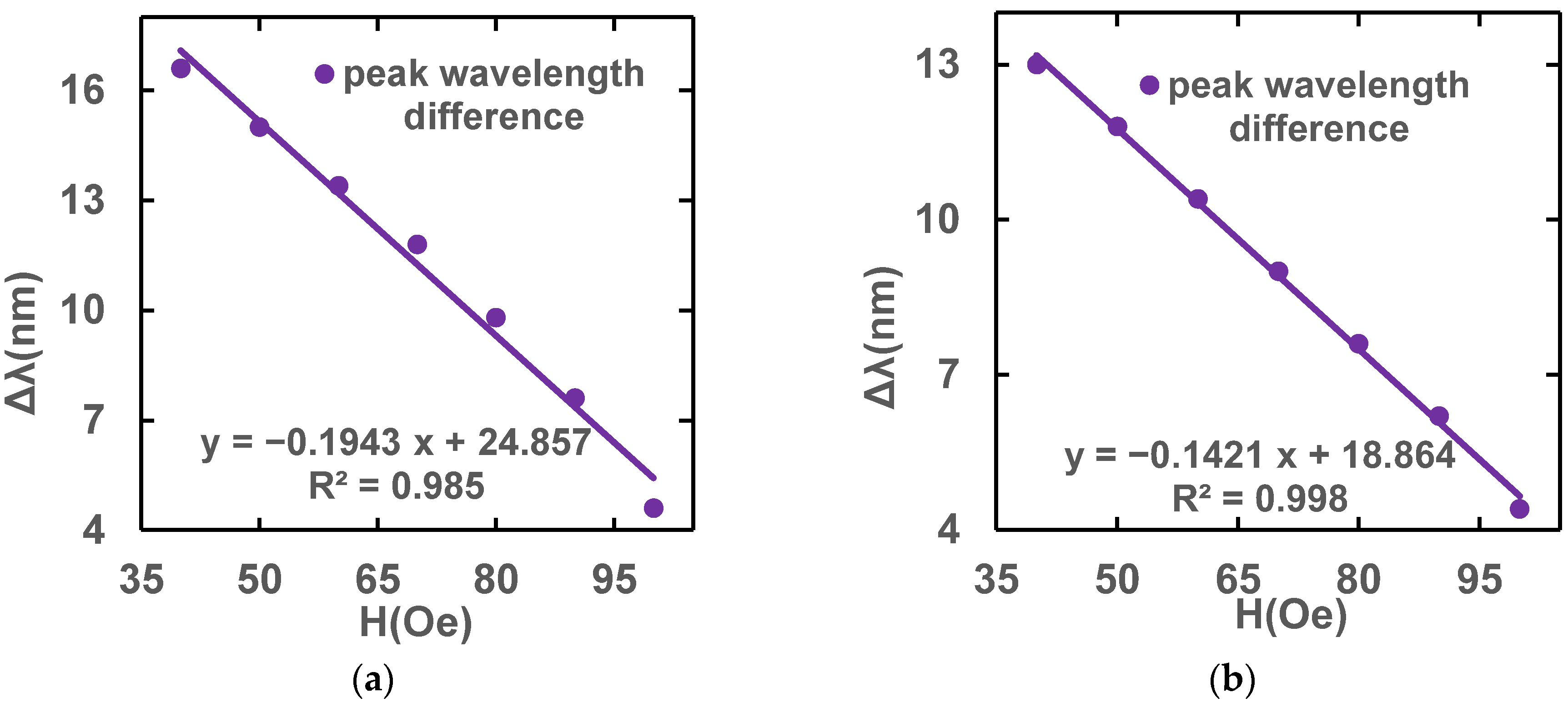
3.2.1. Magnetic Field Sensitivity Performance Design
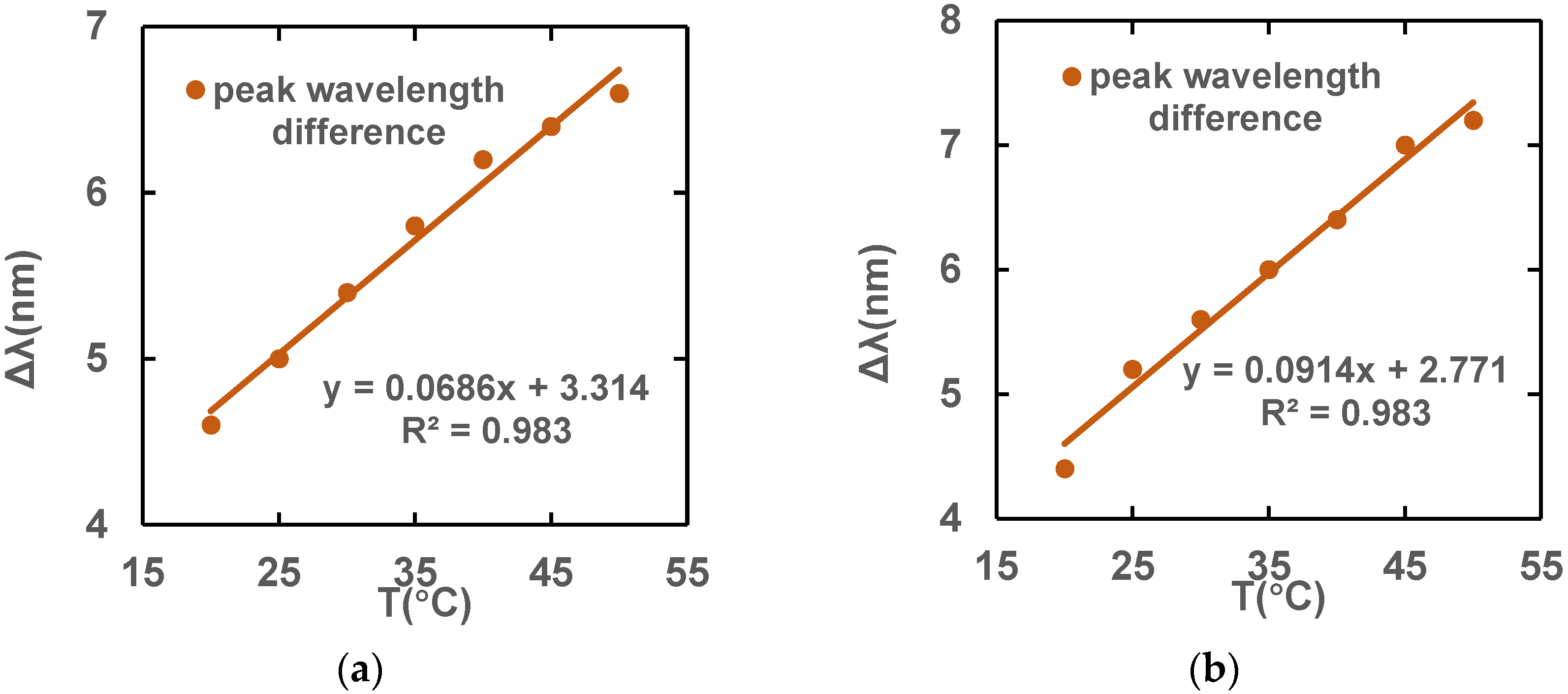
3.2.2. Temperature Sensitivity Performance Design
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Javaid, M.; Haleem, A.; Rab, S.; Singh, R.P.; Suman, R. Sensors for daily life: A review. Sens. Int. 2021, 2, 100121. [Google Scholar] [CrossRef]
- Hadjigeorgiou, N.; Asimakopoulos, K.; Papafotis, K.; Sotiriadis, P.P. Vector magnetic field sensors: Operating principles, calibration, and applications. IEEE Sens. J. 2020, 21, 12531–12544. [Google Scholar] [CrossRef]
- Alberto, N.; Domingues, M.F.; Marques, C.; André, P.; Antunes, P. Optical fiber magnetic field sensors based on magnetic fluid: A review. Sensors 2018, 18, 4325. [Google Scholar] [CrossRef] [PubMed]
- Wei, S.; Liao, X.; Zhang, H.; Pang, J.; Zhou, Y. Recent progress of fluxgate magnetic sensors: Basic research and application. Sensors 2021, 21, 1500. [Google Scholar] [CrossRef] [PubMed]
- Lenz, J.E. A review of magnetic sensors. Proc. IEEE 1990, 78, 973–989. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, M.; Wu, B.; Han, M.; Yin, B.; Cao, J.; Wang, C. Temperature-Insensitive Magnetic Field Sensor Based on an Optoelectronic Oscillator Merging a Mach–Zehnder Interferometer. IEEE Sens. J. 2020, 20, 7053–7059. [Google Scholar] [CrossRef]
- Wang, J.; Pei, L.; Wang, J.; Ruan, Z.; Zheng, J.; Li, J.; Ning, T. Magnetic field and temperature dual-parameter sensor based on magnetic fluid materials filled photonic crystal fiber. Opt. Express 2020, 28, 1456–1471. [Google Scholar] [CrossRef]
- Zu, P.; Chan, C.C.; Lew, W.S.; Jin, Y.; Zhang, Y.; Liew, H.F.; Chen, L.H.; Wong, W.C.; Dong, X. Magneto-optical fiber sensor based on magnetic fluid. Opt. Lett. 2012, 37, 398–400. [Google Scholar] [CrossRef]
- da Silva, A.A.D.; Alves, H.P.; Marcolino, F.C.; do Nascimento, J.F.; Martins-Filho, J.F. Computational Modeling of Optical Fiber-Based Magnetic Field Sensors Using the Faraday and Kerr Magnetooptic Effects. IEEE Trans. Magn. 2020, 56, 1–9. [Google Scholar] [CrossRef]
- Scholten, P. The origin of magnetic birefringence and dichroism in magnetic fluids. IEEE Trans. Magn. 1980, 16, 221–225. [Google Scholar] [CrossRef]
- Yang, S.Y.; Chiu, Y.P.; Jeang, B.; Horng, H.E.; Hong, C.Y.; Yang, H.C. Origin of field-dependent optical transmission of magnetic fluid films. Appl. Phys. Lett. 2001, 79, 2372–2374. [Google Scholar] [CrossRef]
- Habib, M.A.; Anower, M.S.; Hasan, M.R. Highly birefringent and low effective material loss microstructure fiber for THz wave guidance. Opt. Commun. 2018, 423, 140–144. [Google Scholar] [CrossRef]
- Yin, J.; Ruan, S.; Liu, T.; Jiang, J.; Wang, S.; Wei, H.; Yan, P. All-fiber-optic vector magnetometer based on nano-magnetic fluids filled double-clad photonic crystal fiber. Sens. Actuators B Chem. 2017, 238, 518–524. [Google Scholar] [CrossRef]
- Hossain, M.S.; Kamruzzaman, M.; Sen, S.; Azad, M.M.; Mollah, M.S.H. Hexahedron core with sensor based photonic crystal fiber: An approach of design and performance analysis. Sens. Bio-Sens. Res. 2021, 32, 100426. [Google Scholar] [CrossRef]
- Islam, M.S.; Paul, B.K.; Ahmed, K.; Asaduzzaman, S.; Islam, M.I.; Chowdhury, S.; Sen, S.; Bahar, A.N. Liquid-infiltrated photonic crystal fiber for sensing purpose: Design and analysis. Alex. Eng. J. 2018, 57, 1459–1466. [Google Scholar] [CrossRef]
- Arif, M.F.H.; Hossain, M.M.; Islam, N.; Khaled, S.M. A nonlinear photonic crystal fiber for liquid sensing application with high birefringence and low confinement loss. Sens. Bio-Sens. Res. 2019, 22, 100252. [Google Scholar] [CrossRef]
- Haque, E.; Mahmuda, S.; Hossain, M.A.; Hai, N.H.; Namihira, Y.; Ahmed, F. Highly sensitive dual-core PCF based plasmonic refractive index sensor for low refractive index detection. IEEE Photonics J. 2019, 11, 1–9. [Google Scholar] [CrossRef]
- Jäger, T.; Mokos, A.; Prasianakis, N.I.; Leyer, S. Pore-Level Multiphase Simulations of Realistic Distillation Membranes for Water Desalination. Membranes 2022, 12, 1112. [Google Scholar] [CrossRef]
- Mollah, M.A.; Islam, S.M.R.; Yousufali, M.; Abdulrazak, L.F.; Hossain, M.B.; Amiri, I.S. Plasmonic temperature sensor using D-shaped photonic crystal fiber. Results Phys. 2020, 16, 102966. [Google Scholar] [CrossRef]
- Liu, C.; Shen, T.; Wu, H.-B.; Feng, Y.; Chen, J.-J. Applications of magneto-strictive, magneto-optical, magnetic fluid materials in optical fiber current sensors and optical fiber magnetic field sensors: A review. Opt. Fiber Technol. 2021, 65, 102634. [Google Scholar] [CrossRef]
- De, M.; Gangopadhyay, T.K.; Singh, V.K. Prospects of Photonic Crystal Fiber as Physical Sensor: An Overview. Sensors 2019, 19, 464. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Wu, Q.L.; Zhang, Y.N. Simultaneous measurement of salinity, temperature and pressure in seawater using optical fiber SPR sensor. Measurement 2019, 148, 106792. [Google Scholar] [CrossRef]
- Wang, G.; Lu, Y.; Yang, X.; Duan, L.; Yao, J. High-sensitivity magnetic field sensor based on a dual-core photonic crystal fiber. Appl. Opt. 2019, 58, 5800–5806. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Chen, H.; Liu, Y.; Ma, M.; Li, S. Analysis of a magnetic field sensor based on photonic crystal fiber selectively infiltrated with magnetic fluids. Opt. Fiber Technol. 2018, 46, 43–47. [Google Scholar] [CrossRef]
- Mo, X.; Lv, J.; Liu, Q.; Jiang, X.; Si, G. A Magnetic Field SPR Sensor Based on Temperature Self-Reference. Sensors 2021, 21, 6130. [Google Scholar] [CrossRef]
- Ying, Y.; Hu, N.; Si, G.-Y.; Xu, K.; Liu, N.; Zhao, J.-Z. Magnetic field and temperature sensor based on D-shaped photonic crystal fiber. Optik 2019, 176, 309–314. [Google Scholar] [CrossRef]
- Liu, H.; Chen, C.; Wang, H.; Zhang, W. Simultaneous measurement of magnetic field and temperature based on surface plasmon resonance in twin-core photonic crystal fiber. Optik 2020, 203, 164007. [Google Scholar] [CrossRef]
- Wang, D.; Huang, Q.; Yang, J.; Yuan, L. Temperature-Magnetic Field Dual-Parameter Sensor Based on Circular Lattice Photonic Crystal Fiber. Electronics 2022, 11, 3353. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, S.; Tse, W.; Horng, H.; Hong, C.; Yang, H. Thermal effect on the field-dependent refractive index of the magnetic fluid film. Appl. Phys. Lett. 2003, 82, 3481–3483. [Google Scholar] [CrossRef]
- Koshiba, M.; Saitoh, K. Finite-element analysis of birefringence and dispersion properties in actual and idealized holey-fiber structures. Appl. Opt. 2003, 42, 6267–6275. [Google Scholar] [CrossRef]
- Zhou, D.; Jin, D.; Ni, Q.; Song, X.; Bai, X.; Han, K. Fabrication of double-cladding Ho3+/Tm3+ co-doped Bi2O3–GeO2–Ga2O3–BaF2 glass fiber and its performance in a 2.0-μm laser. J. Am. Ceram. Soc. 2019, 102, 4748–4756. [Google Scholar] [CrossRef]
- Azab, M.Y.; Hameed, M.F.O.; Mahdiraji, G.A.; Adikan, F.R.M.; Obayya, S.S.A. Experimental and numerical characterization of a D-shaped PCF refractive index sensor. Opt. Quantum Electron. 2022, 54, 846. [Google Scholar] [CrossRef]
- Liang, L.; Ju, B.; Long, X.; Liu, J.; Rong, S.; Xia, C.; Chen, Y.; Hou, Z.; Zhou, G.; Zhao, N. Fabrication and optical properties of Tm3+/Al3+ co-doped photonic crystal fiber based on CO2 laser sintering technology. J. Non-Cryst. Solids 2019, 522, 119590. [Google Scholar] [CrossRef]
- Ebendorff-Heidepriem, H.; Monro, T.M. Extrusion of complex preforms for microstructured optical fibers. Opt. Express 2007, 15, 15086–15092. [Google Scholar] [CrossRef] [PubMed]
- Tang, Y.; Tehan, E.C.; Tao, Z.; Bright, F.V. Sol−Gel-Derived Sensor Materials That Yield Linear Calibration Plots, High Sensitivity, and Long-Term Stability. Anal. Chem. 2003, 75, 2407–2413. [Google Scholar] [CrossRef] [PubMed]


















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, L.; Wang, Q.; Yin, B.; Xiao, S.; Li, H.; Wang, M.; Liu, X.; Wu, S. Research on Simultaneous Measurement of Magnetic Field and Temperature Based on Petaloid Photonic Crystal Fiber Sensor. Sensors 2023, 23, 7940. https://doi.org/10.3390/s23187940
Yan L, Wang Q, Yin B, Xiao S, Li H, Wang M, Liu X, Wu S. Research on Simultaneous Measurement of Magnetic Field and Temperature Based on Petaloid Photonic Crystal Fiber Sensor. Sensors. 2023; 23(18):7940. https://doi.org/10.3390/s23187940
Chicago/Turabian StyleYan, Lili, Qichao Wang, Bin Yin, Shiying Xiao, Haisu Li, Muguang Wang, Xingyu Liu, and Songhua Wu. 2023. "Research on Simultaneous Measurement of Magnetic Field and Temperature Based on Petaloid Photonic Crystal Fiber Sensor" Sensors 23, no. 18: 7940. https://doi.org/10.3390/s23187940