
Road Descriptors for Fast Global Localization on Rural Roads Using OpenStreetMap

Abstract
:1. Introduction
2. Related Work
3. Methodology
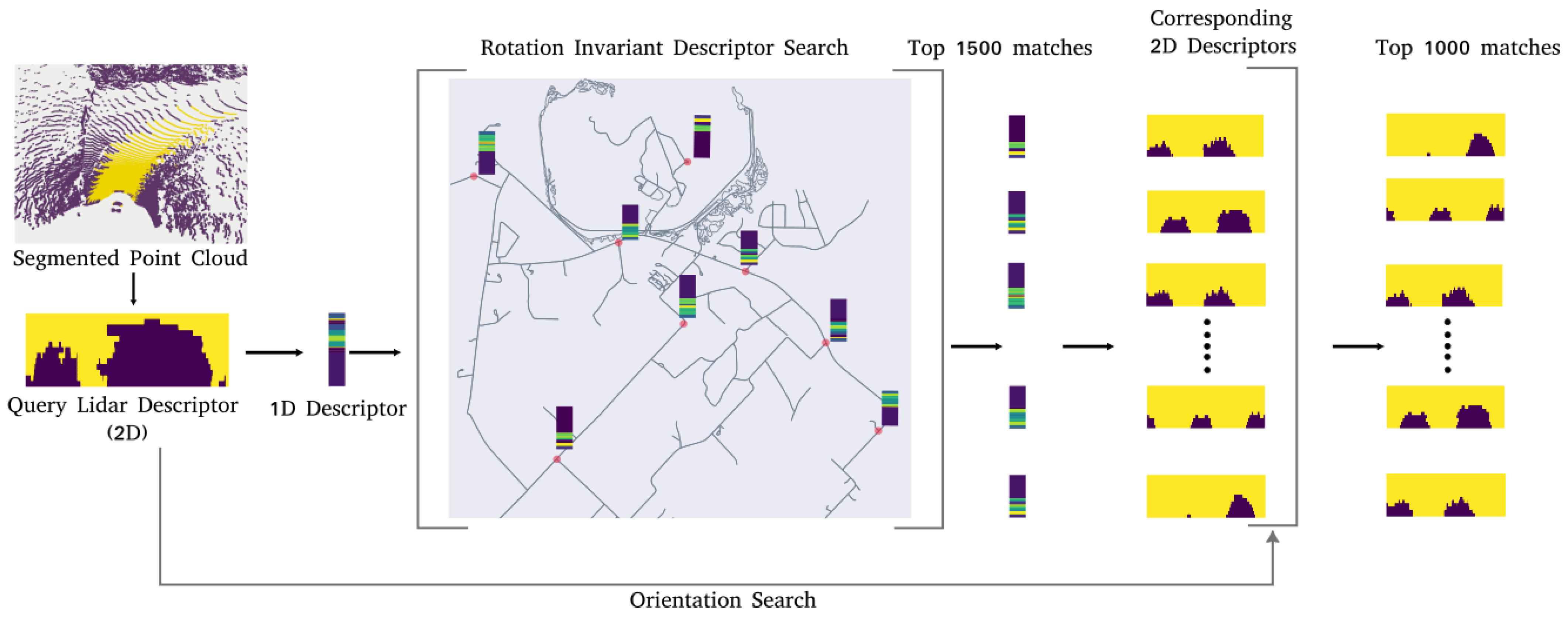
3.1. Road Descriptors and Motion Model
3.2. Measurement Model
4. Experimentation and Results
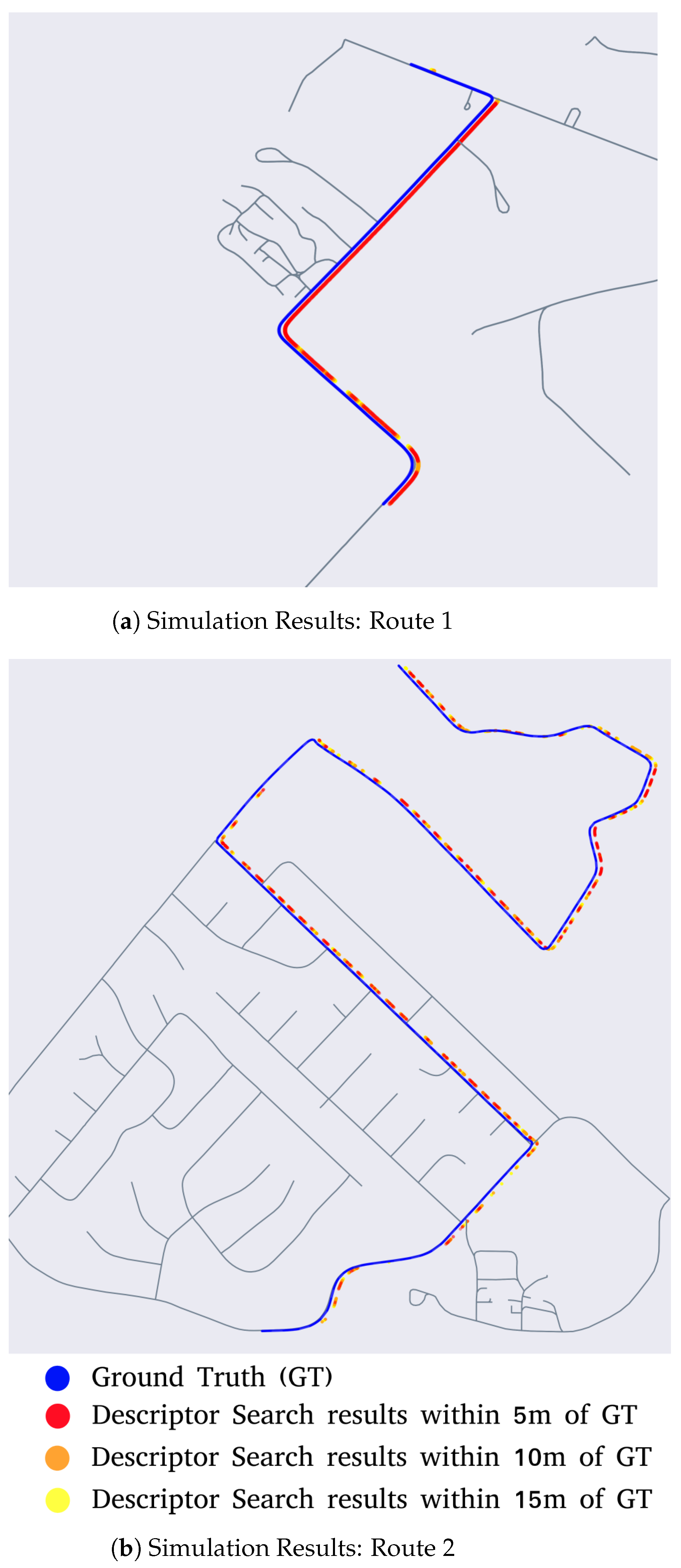
4.1. Simulation Tests
4.2. Real-World Tests
4.3. Runtimes
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Levinson, J.; Thrun, S. Robust vehicle localization in urban environments using probabilistic maps. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4372–4378. [Google Scholar]
- Ziegler, J.; Bender, P.; Schreiber, M.; Lategahn, H.; Strauss, T.; Stiller, C.; Dang, T.; Franke, U.; Appenrodt, N.; Keller, C.G.; et al. Making Bertha Drive—An Autonomous Journey on a Historic Route. IEEE Intell. Transp. Syst. Mag. 2014, 6, 8–20. [Google Scholar] [CrossRef]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Warwick, G. Lightsquared Tests Confirm GPS Jamming. Originally Published Online by Aviation Week on 9 June 2011. Available online: https://web.archive.org/web/20110812045607/http://www.aviationweek.com/aw/generic/story.jsp?id=news%2Fawx%2F2011%2F06%2F09%2Fawx_06_09_2011_p0-334122.xml&headline=LightSquared%20Tests%20Confirm%20GPS%20Jamming&channel=busav (accessed on 30 July 2020).
- Gregorius, T.L.H.; Blewitt, G. The Effect of Weather Fronts on GPS Measurements. GPS World 1998, 9, 52–60. [Google Scholar]
- Zhang, S.; He, L.; Wu, L. Statistical Study of Loss of GPS Signals Caused by Severe and Great Geomagnetic Storms. J. Geophys. Res. Space Phys. 2020, 125, e2019JA027749. [Google Scholar] [CrossRef]
- Hentschel, M.; Wulf, O.; Wagner, B. A GPS and laser-based localization for urban and non-urban outdoor environments. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 149–154. [Google Scholar] [CrossRef]
- Hentschel, M.; Wagner, B. Autonomous robot navigation based on openstreetmap geodata. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 1645–1650. [Google Scholar]
- Floros, G.; Van Der Zander, B.; Leibe, B. Openstreetslam: Global vehicle localization using openstreetmaps. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1054–1059. [Google Scholar]
- Ruchti, P.; Steder, B.; Ruhnke, M.; Burgard, W. Localization on openstreetmap data using a 3d laser scanner. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5260–5265. [Google Scholar]
- Ort, T.; Murthy, K.; Banerjee, R.; Gottipati, S.K.; Bhatt, D.; Gilitschenski, I.; Paull, L.; Rus, D. Maplite: Autonomous intersection navigation without a detailed prior map. IEEE Robot. Autom. Lett. 2019, 5, 556–563. [Google Scholar] [CrossRef]
- Zhou, M.; Chen, X.; Samano, N.; Stachniss, C.; Calway, A. Efficient Localisation Using Images and OpenStreetMaps. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 5507–5513. [Google Scholar]
- Rangan, S.N.K.; Yalla, V.G.; Bacchet, D.; Domi, I. Improved localization using visual features and maps for Autonomous Cars. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 623–629. [Google Scholar] [CrossRef]
- Yan, F.; Vysotska, O.; Stachniss, C. Global Localization on OpenStreetMap Using 4-bit Semantic Descriptors. In Proceedings of the 2019 European Conference on Mobile Robots (ECMR), Prague, Czech Republic, 4–6 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Cho, Y.; Kim, G.; Lee, S.; Ryu, J.H. OpenStreetMap-based LiDAR Global Localization in Urban Environment without a Prior LiDAR Map. IEEE Robot. Autom. Lett. 2022, 7, 4999–5006. [Google Scholar] [CrossRef]
- Milioto, A.; Vizzo, I.; Behley, J.; Stachniss, C. RangeNet++: Fast and Accurate LiDAR Semantic Segmentation. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4213–4220. [Google Scholar] [CrossRef]
- Ninan, S.; Rathinam, S. Autonomous Vehicle Rural Road Dataset (06-004); VTTI: Blacksburg, VA, USA, 2022; V1. [Google Scholar] [CrossRef]
- Chen, X.; Milioto, A.; Palazzolo, E.; Giguère, P.; Behley, J.; Stachniss, C. SuMa++: Efficient LiDAR-based Semantic SLAM. arXiv 2021, arXiv:2105.11320. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Search Space | APE (m) | RMSE | |
|---|---|---|---|---|
| Maplite | 9 sq. km | 1.0 | 1.2 | 0.63 |
| Maplite + RDS | 9 sq. km | 0.7 | 0.85 | 0.46 |
| Maplite | 36 sq. km | 0.61 | 0.76 | 0.45 |
| Maplite + RDS | 36 sq. km | 0.5 | 0.54 | 0.21 |
| SuMA SLAM N/A | 1.2 | 1.38 | 0.68 |
| Method | Search Space | APE (m) | RMSE | |
|---|---|---|---|---|
| Maplite | 9 sq. km | - | - | - |
| Maplite + RDS | 9 sq. km | 0.81 | 0.7 | 0.45 |
| Maplite | 36 sq. km | - | - | - |
| Maplite + RDS | 36 sq. km | 0.81 | 1.08 | 0.7 |
| SuMA SLAM | N/A | 1.3 | 1.45 | 0.87 |
| Method | Particles | Runtime (ms) |
|---|---|---|
| Maplite | 90,000 | 102 |
| Maplite | 150,000 | 192 |
| Maplite + RDS | 90,000 | 105 |
| SuMA SLAM | N/A | 120 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ninan, S.; Rathinam, S. Road Descriptors for Fast Global Localization on Rural Roads Using OpenStreetMap. Sensors 2023, 23, 7915. https://doi.org/10.3390/s23187915
Ninan S, Rathinam S. Road Descriptors for Fast Global Localization on Rural Roads Using OpenStreetMap. Sensors. 2023; 23(18):7915. https://doi.org/10.3390/s23187915
Chicago/Turabian StyleNinan, Stephen, and Sivakumar Rathinam. 2023. "Road Descriptors for Fast Global Localization on Rural Roads Using OpenStreetMap" Sensors 23, no. 18: 7915. https://doi.org/10.3390/s23187915