
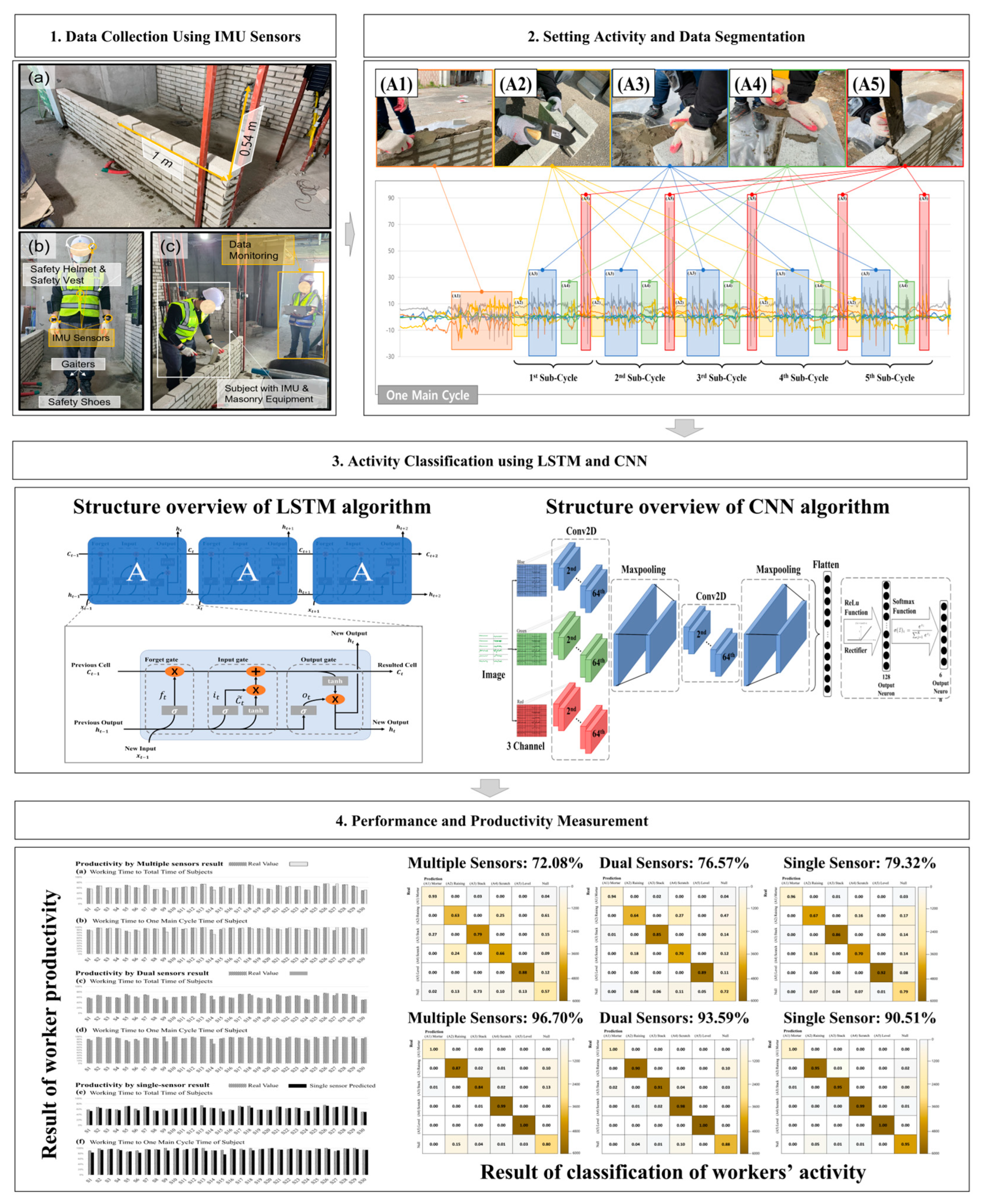
Productivity Measurement through IMU-Based Detailed Activity Recognition Using Machine Learning: A Case Study of Masonry Work


Abstract
:1. Introduction
1.1. Motivation of the Study
1.2. Key Research Gaps and Hypothesis
1.3. Content Organization
1.4. Related Works and Research Background
2. Methodology
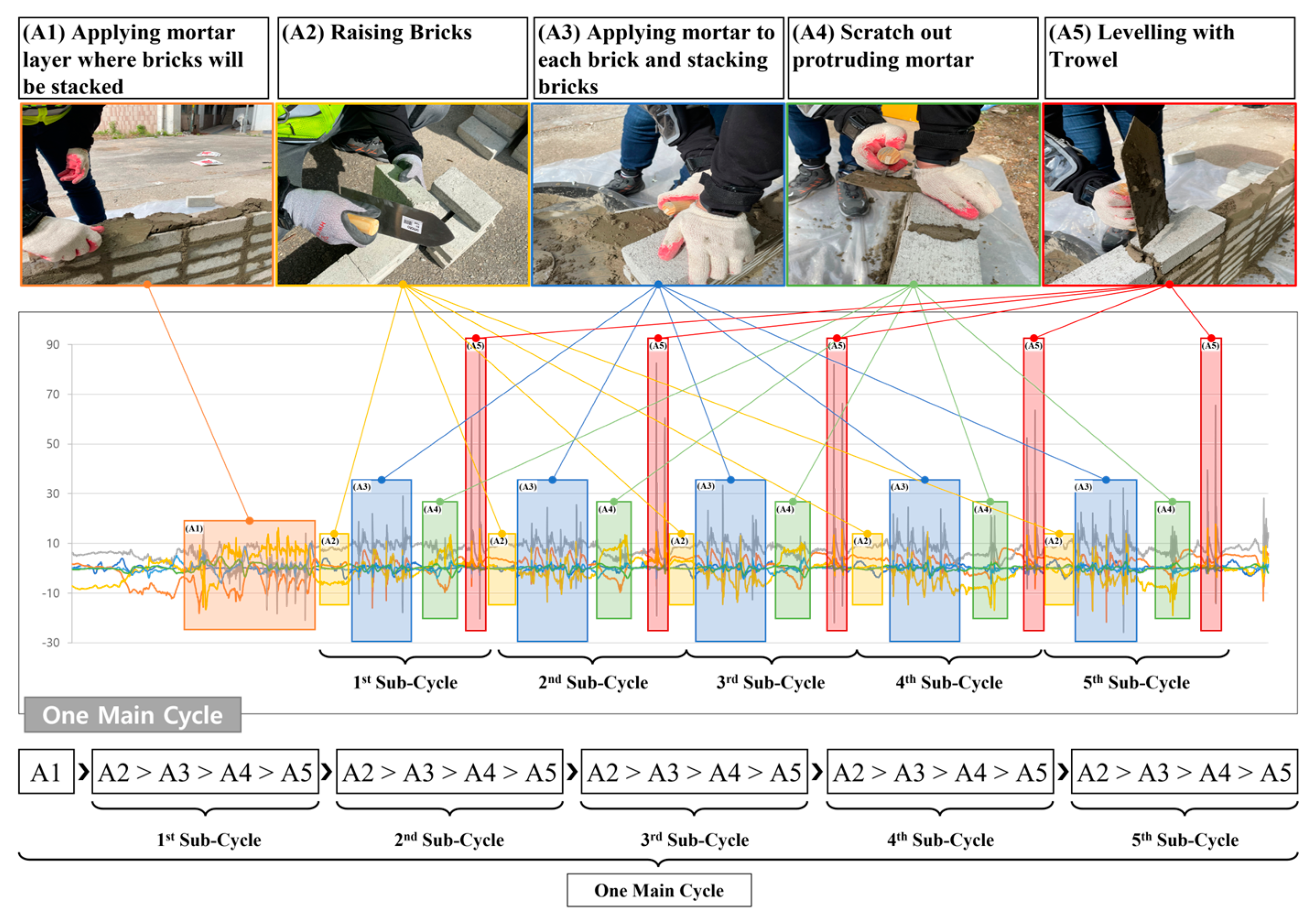
2.1. Experimental Design
2.2. Data Processing and Data Segmentation
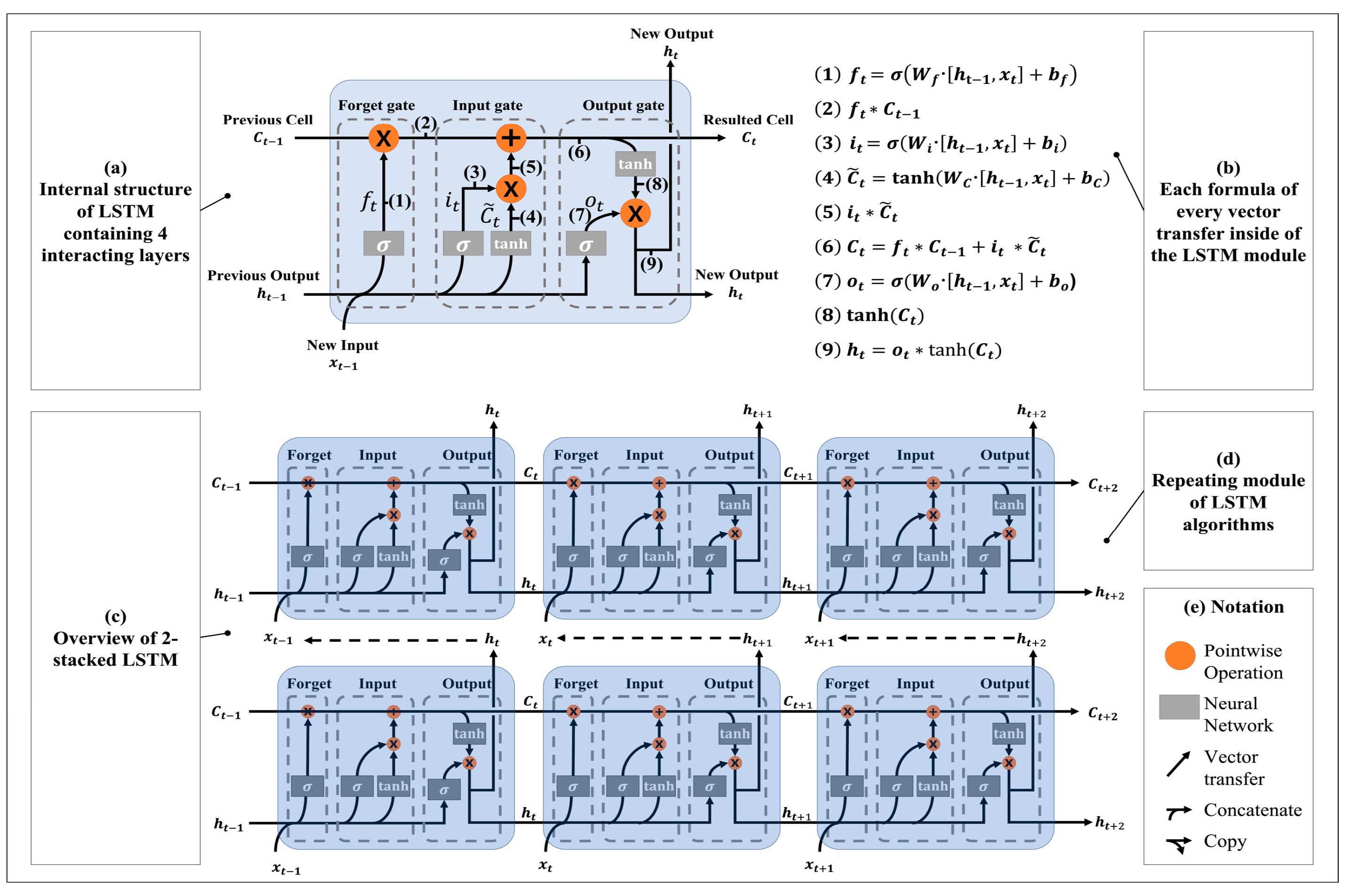
2.3. Long Short-Term Memory Algorithm
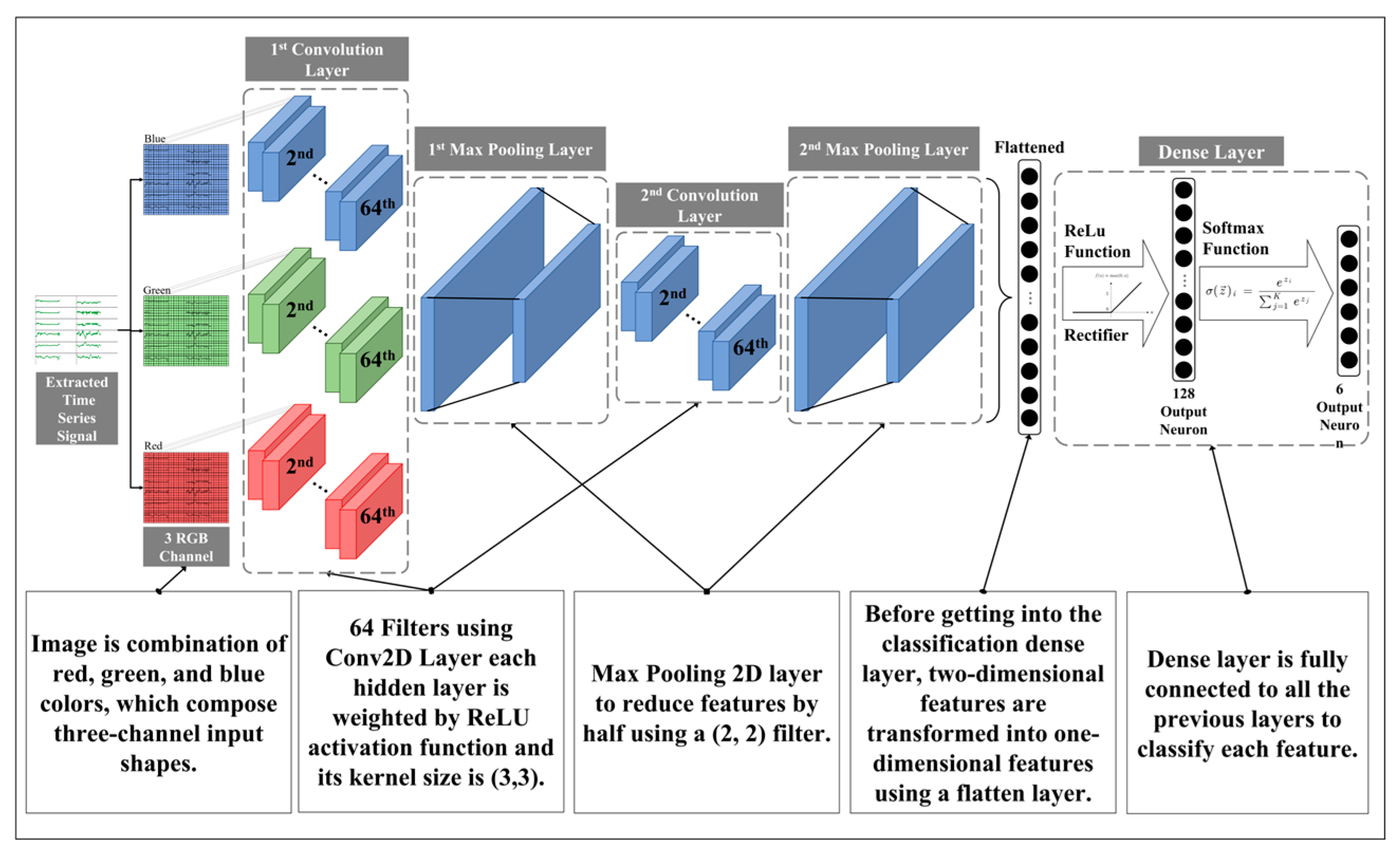
2.4. Convolution Neural Network Algorithm
2.5. Model Training and Performance Evaluation Methods
2.6. Productivity Measurement
3. Results
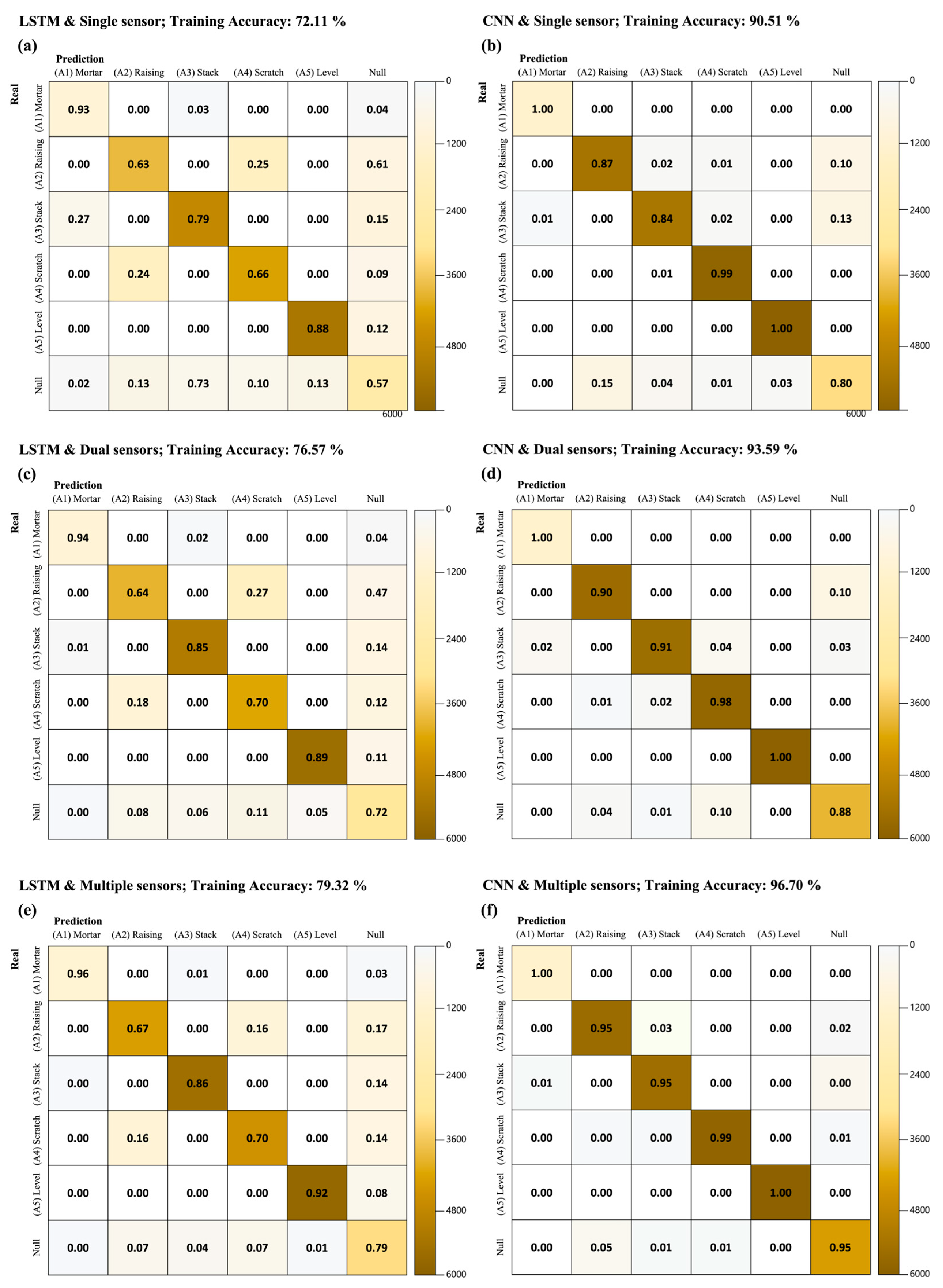
3.1. Activity Classification Performance
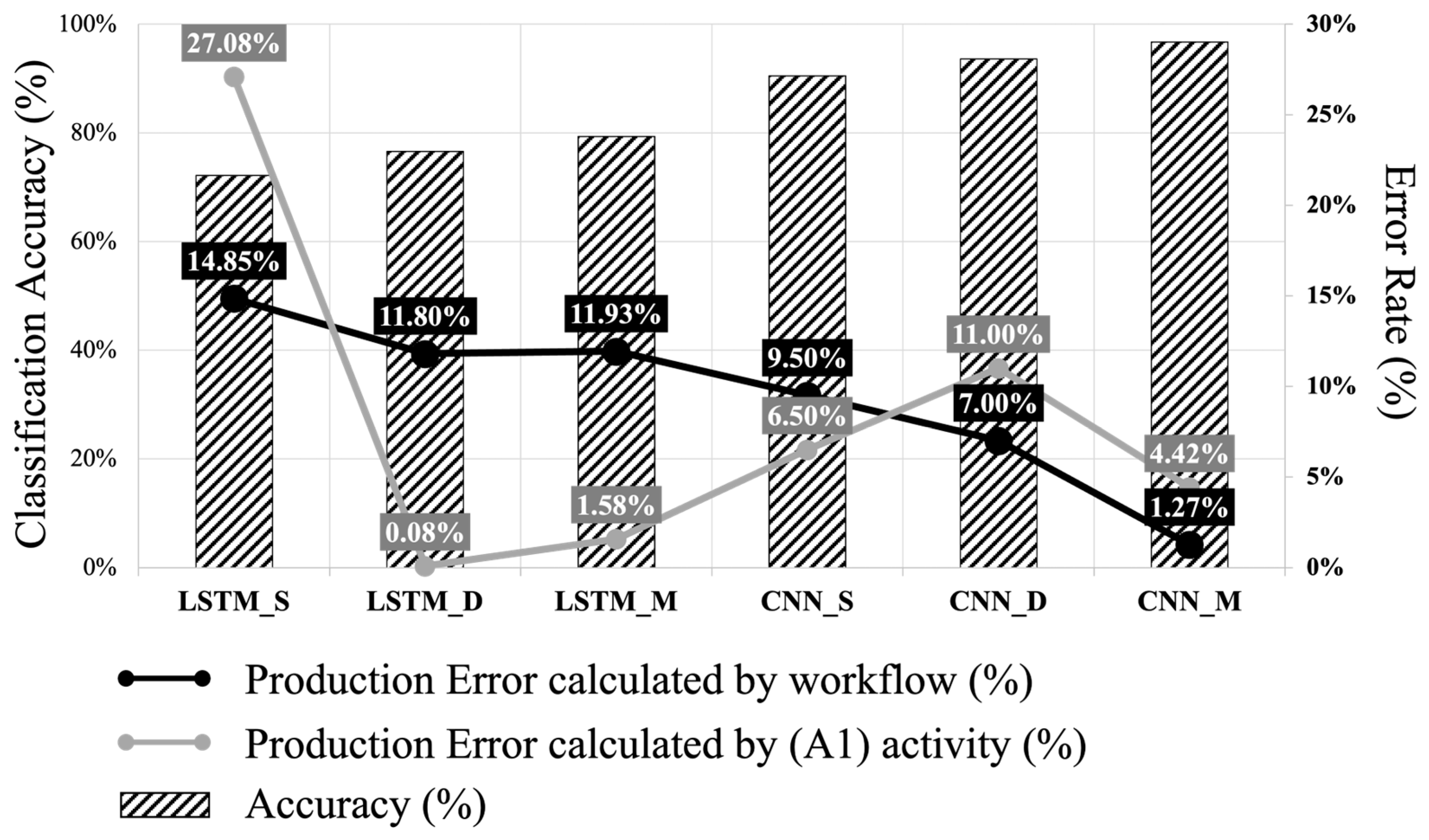
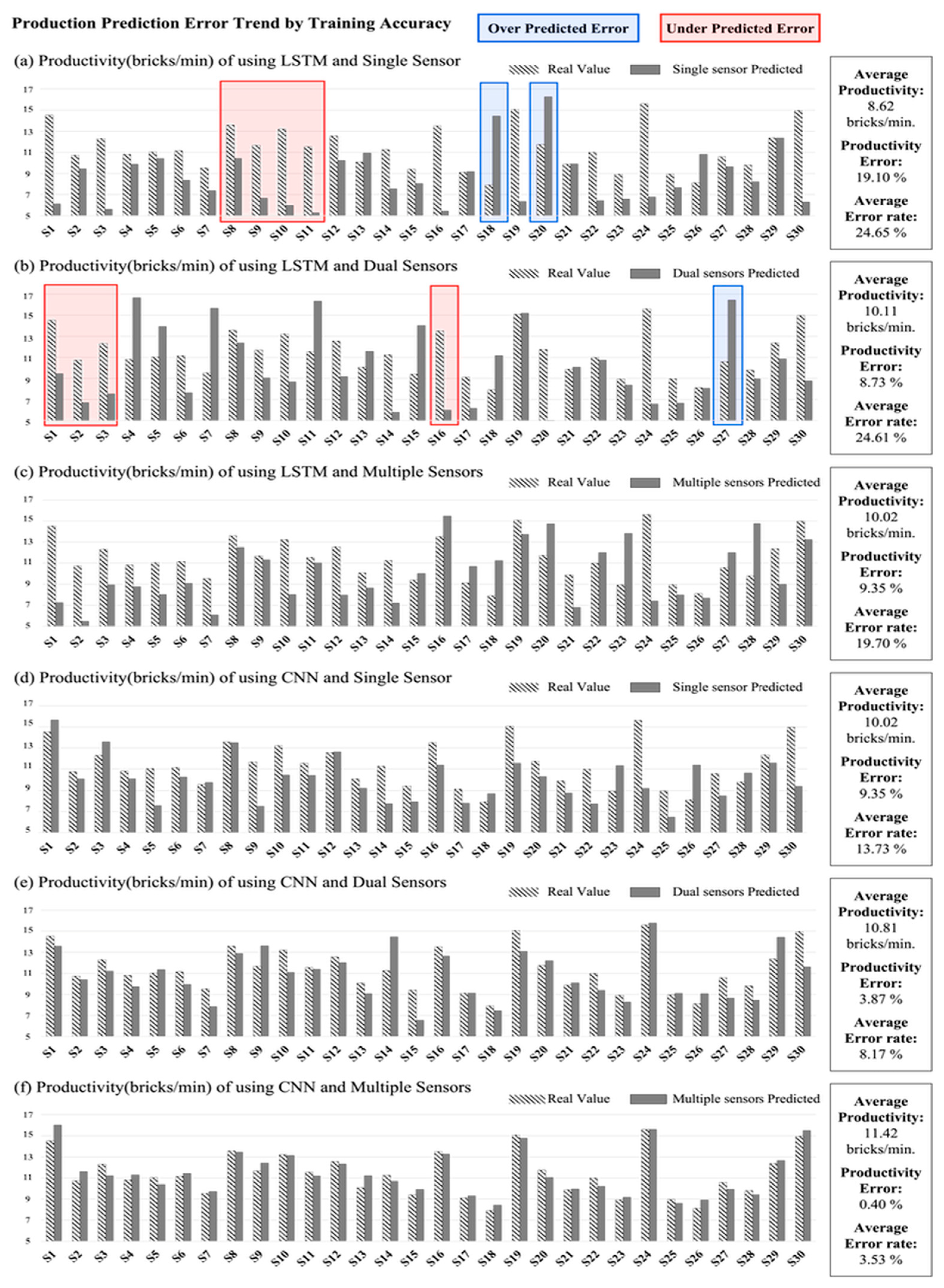
3.2. Productivity Measurement
4. Discussions
4.1. Underpredicted and Overpredicted Errors in Productivity Calculation
4.2. Accuracy Comparison between Different Algorithms and Research
4.3. Contributions and Practical Applications
4.4. Limitations and Future Research
- (1)
- Field Applicability.
- (2)
- Accuracy of general level of sensors.
- (3)
- Proper fixation of sensors.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sherafat, B.; Ahn, C.R.; Akhavian, R.; Behzadan, A.H.; Golparvar-Fard, M.; Kim, H.; Lee, Y.-C.; Rashidi, A.; Azar, E.R. Automated Methods for Activity Recognition of Construction Workers and Equipment: State-of-the-Art Review. J. Constr. Eng. Manag. 2020, 146, 03120002. [Google Scholar] [CrossRef]
- Behzadan, A.H.; Aziz, Z.; Anumba, C.J.; Kamat, V.R. Ubiquitous Location Tracking for Context-Specific Information Delivery on Construction Sites. Autom. Constr. 2008, 17, 737–748. [Google Scholar] [CrossRef]
- Kamat, V.R.; Martinez, J.C.; Fischer, M.; Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Research in Visualization Techniques for Field Construction. J. Constr. Eng. Manag. 2011, 137, 853–862. [Google Scholar] [CrossRef]
- Yang, Z.; Yuan, Y.; Zhang, M.; Zhao, X.; Tian, B. Assessment of Construction Workers’ Labor Intensity Based on Wearable Smartphone System. J. Constr. Eng. Manag. 2019, 145, 04019039. [Google Scholar] [CrossRef]
- Tam, N.V.; Toan, N.Q.; Hai, D.T.; Quy, N.L.D. Critical Factors Affecting Construction Labor Productivity: A Comparison between Perceptions of Project Managers and Contractors. Cogent Bus. Manag. 2021, 8, 1863303. [Google Scholar] [CrossRef]
- Akhavian, R.; Behzadan, A.H. Construction Equipment Activity Recognition for Simulation Input Modeling Using Mobile Sensors and Machine Learning Classifiers. Adv. Eng. Inform. 2015, 29, 867–877. [Google Scholar] [CrossRef]
- Zhao, J.; Seppänen, O.; Peltokorpi, A.; Badihi, B.; Olivieri, H. Real-Time Resource Tracking for Analyzing Value-Adding Time in Construction. Autom. Constr. 2019, 104, 52–65. [Google Scholar] [CrossRef]
- Awolusi, I.; Marks, E.; Hallowell, M. Wearable Technology for Personalized Construction Safety Monitoring and Trending: Review of Applicable Devices. Autom. Constr. 2018, 85, 96–106. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, Z.; Hammad, A.; Ahmed, W. Vision-Based Excavator Activity Recognition and Productivity Analysis in Construction. In ASCE International Conference on Computing in Civil Engineering 2019; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 241–248. [Google Scholar] [CrossRef]
- Hamilton, P. Open Source ECG Analysis. In Proceedings of the Computers in Cardiology, Memphis, TN, USA, 22–25 September 2002; pp. 101–104. [Google Scholar]
- Chen, W.-C.; Tserng, H.P. Real-Time Individual Workload Management at Tunnel Worksite Using Wearable Heart Rate Measurement Devices. Autom. Constr. 2022, 134, 104051. [Google Scholar] [CrossRef]
- Hwang, S.; Seo, J.; Jebelli, H.; Lee, S. Feasibility Analysis of Heart Rate Monitoring of Construction Workers Using a Photoplethysmography (PPG) Sensor Embedded in a Wristband-Type Activity Tracker. Autom. Constr. 2016, 71, 372–381. [Google Scholar] [CrossRef]
- Muñoz, J.E.; Pereira, F.; Karapanos, E. Workload Management through Glanceable Feedback: The Role of Heart Rate Variability. In Proceedings of the 2016 IEEE 18th International Conference on e-Health Networking, Applications and Services (Healthcom), Munich, Germany, 14–16 September 2016; pp. 1–6. [Google Scholar]
- Hwang, S.; Jebelli, H.; Choi, B.; Choi, M.; Lee, S. Measuring Workers’ Emotional State during Construction Tasks Using Wearable EEG. J. Constr. Eng. Manag. 2018, 144, 04018050. [Google Scholar] [CrossRef]
- Jebelli, H.; Hwang, S.; Lee, S. EEG-Based Workers’ Stress Recognition at Construction Sites. Autom. Constr. 2018, 93, 315–324. [Google Scholar] [CrossRef]
- Antwi-Afari, M.F.; Li, H.; Yu, Y.; Kong, L. Wearable Insole Pressure System for Automated Detection and Classification of Awkward Working Postures in Construction Workers. Autom. Constr. 2018, 96, 433–441. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, J.; Chen, L.; Geng, Y.; Wang, X. Single Wearable Accelerometer-Based Human Activity Recognition via Kernel Discriminant Analysis and QPSO-KELM Classifier. IEEE Access 2019, 7, 109216–109227. [Google Scholar] [CrossRef]
- Akhavian, R.; Behzadan, A.H. Smartphone-Based Construction Workers’ Activity Recognition and Classification. Autom. Constr. 2016, 71, 198–209. [Google Scholar] [CrossRef]
- Sanhudo, L.; Calvetti, D.; Martins, J.P.; Ramos, N.M.M.; Mêda, P.; Gonçalves, M.C.; Sousa, H. Activity Classification Using Accelerometers and Machine Learning for Complex Construction Worker Activities. J. Build. Eng. 2021, 35, 102001. [Google Scholar] [CrossRef]
- Joshua, L.; Varghese, K. Construction Activity Classification Using Accelerometers; American Society of Civil Engineers: Reston, VA, USA, 2012; pp. 61–70. [Google Scholar] [CrossRef]
- Akhavian, R.; Behzadan, A. Wearable Sensor-Based Activity Recognition for Data-Driven Simulation of Construction Workers’ Activities. In Proceedings of the 2015 Winter Simulation Conference (WSC), Huntington Beach, CA, USA, 6–9 December 2015; pp. 3333–3344. [Google Scholar]
- Ryu, J.; Seo, J.; Jebelli, H.; Lee, S. Automated Action Recognition Using an Accelerometer-Embedded Wristband-Type Activity Tracker. J. Constr. Eng. Manag. 2019, 145, 04018114. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Mun, K.-R.; Jung, D.; Han, J.; Park, M.; Kim, J.; Kim, J. IMU-Based Spectrogram Approach with Deep Convolutional Neural Networks for Gait Classification. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; pp. 1–6. [Google Scholar]
- El-Gohary, K.M.; Aziz, R.F. Factors Influencing Construction Labor Productivity in Egypt. J. Manag. Eng. 2014, 30, 1–9. [Google Scholar] [CrossRef]
- OECD Measuring Productivity. OECD Manual: Measurement of Aggregate and Industry-Level Productivity Growth; OECD Publishing: Paris, France, 2001; ISBN 978-92-64-19451-9. [Google Scholar]
- Mathis, R.L.; Jackson, J.H.; Valentine, S.R.; Meglich, P. Human Resource Management; Cengage Learning: Boston, MA, USA, 2016; ISBN 978-1-305-85618-9. [Google Scholar]
- Peddi, A.; Huan, L.; Bai, Y.; Kim, S. Development of Human Pose Analyzing Algorithms for the Determination of Construction Productivity in Real-Time; American Society of Civil Engineers: Reston, VA, USA, 2012; pp. 11–20. [Google Scholar] [CrossRef]
- Liu, K.; Golparvar-Fard, M. Crowdsourcing Construction Activity Analysis from Jobsite Video Streams. J. Constr. Eng. Manag. 2015, 141, 04015035. [Google Scholar] [CrossRef]
- Gong, J.; Caldas, C.H. Computer Vision-Based Video Interpretation Model for Automated Productivity Analysis of Construction Operations. J. Comput. Civ. Eng. 2010, 24, 252–263. [Google Scholar] [CrossRef]
- Luo, H.; Xiong, C.; Fang, W.; Love, P.E.D.; Zhang, B.; Ouyang, X. Convolutional Neural Networks: Computer Vision-Based Workforce Activity Assessment in Construction. Autom. Constr. 2018, 94, 282–289. [Google Scholar] [CrossRef]
- Yang, J.; Shi, Z.; Wu, Z. Vision-Based Action Recognition of Construction Workers Using Dense Trajectories. Adv. Eng. Inform. 2016, 30, 327–336. [Google Scholar] [CrossRef]
- Bodor, R.; Jackson, B.; Papanikolopoulos, N.; Tracking, H. Vision-Based Human Tracking and Activity Recognition. In Proceedings of the 11th Mediterranean Conference on Control and Automation, Kostrzewa Joseph, Rhodes, Greece, 18–21 June 2003; pp. 18–20. [Google Scholar]
- Cheng, B.; Fan, C.; Fu, H.; Huang, J.; Chen, H.; Luo, X. Measuring and Computing Cognitive Statuses of Construction Workers Based on Electroencephalogram: A Critical Review. IEEE Trans. Comput. Soc. Syst. 2022, 9, 1–16. [Google Scholar] [CrossRef]
- Koo, C.H.; Zhu, H.; Tsang, Y.T.; Yu, T.T.; Tsang, K.F.; Lai, L.L. A Humans’ Status Detection Scheme for Industrial Safety. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, Australia, 12–15 June 2018; pp. 1291–1295. [Google Scholar]
- Kim, J.H.; Jo, B.W.; Jo, J.H.; Kim, D.K. Development of an IoT-Based Construction Worker Physiological Data Monitoring Platform at High Temperatures. Sensors 2020, 20, 5682. [Google Scholar] [CrossRef]
- Ngueleu, A.M.; Blanchette, A.K.; Maltais, D.; Moffet, H.; McFadyen, B.J.; Bouyer, L.; Batcho, C.S. Validity of Instrumented Insoles for Step Counting, Posture and Activity Recognition: A Systematic Review. Sensors 2019, 19, 2438. [Google Scholar] [CrossRef] [PubMed]
- Antwi-Afari, M.F.; Li, H.; Umer, W.; Yu, Y.; Xing, X. Construction Activity Recognition and Ergonomic Risk Assessment Using a Wearable Insole Pressure System. J. Constr. Eng. Manag. 2020, 146, 04020077. [Google Scholar] [CrossRef]
- Kim, K.; Cho, Y.K. Automatic Recognition of Workers’ Motions in Highway Construction by Using Motion Sensors and Long Short-Term Memory Networks. J. Constr. Eng. Manag. 2021, 147, 04020184. [Google Scholar] [CrossRef]
- Joshua, L.; Varghese, K. Accelerometer-Based Activity Recognition in Construction. J. Comput. Civ. Eng. 2011, 25, 370–379. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, Z.; Hammad, A. Automated Excavators Activity Recognition and Productivity Analysis from Construction Site Surveillance Videos. Autom. Constr. 2020, 110, 103045. [Google Scholar] [CrossRef]
- Antwi Afari, M.F.; Li, H.; Seo, J.O.; Wong, A.Y.L. Automated Recognition of Construction Workers’ Activities for Productivity Measurement Using Wearable Insole Pressure System: CIB World Building Congress 2019. In Proceedings of the International Council for Research and Innovation in Building and Construction (CIB) World Building Congress 2019—Constructing Smart Cities, Hong Kong, China, 17–21 June 2019. [Google Scholar]
- Bangaru, S.S.; Wang, C.; Busam, S.A.; Aghazadeh, F. ANN-Based Automated Scaffold Builder Activity Recognition through Wearable EMG and IMU Sensors. Autom. Constr. 2021, 126, 103653. [Google Scholar] [CrossRef]
- Bulling, A.; Blanke, U.; Schiele, B. A Tutorial on Human Activity Recognition Using Body-Worn Inertial Sensors. ACM Comput. Surv. 2014, 46, 1–33. [Google Scholar] [CrossRef]
- Mekruksavanich, S.; Jitpattanakul, A. LSTM Networks Using Smartphone Data for Sensor-Based Human Activity Recognition in Smart Homes. Sensors 2021, 21, 1636. [Google Scholar] [CrossRef] [PubMed]
- Ahn, C.R.; Lee, S.; Peña-Mora, F. Application of Low-Cost Accelerometers for Measuring the Operational Efficiency of a Construction Equipment Fleet. J. Comput. Civ. Eng. 2015, 29, 04014042. [Google Scholar] [CrossRef]
- Yang, X.; Wang, F.; Zhai, X.; Li, H.; Yu, Y.; Luo, X. A Low-Cost and Smart IMU Tool for Tracking Construction Activities. In Proceedings of the International Symposium on Automation and Robotics in Construction, Chennai, India, 3–9 July 2019; IAARC Publications: Waterloo, ON, Canada, 2019; Volume 36, pp. 35–41. [Google Scholar]
- Antwi-Afari, M.F.; Li, H.; Wong, J.K.-W.; Oladinrin, O.T.; Ge, J.X.; Seo, J.; Wong, A.Y.L. Sensing and Warning-Based Technology Applications to Improve Occupational Health and Safety in the Construction Industry: A Literature Review. Eng. Constr. Archit. Manag. 2019, 26, 1534–1552. [Google Scholar] [CrossRef]
- Ahn, C.R.; Lee, S.; Sun, C.; Jebelli, H.; Yang, K.; Choi, B. Wearable Sensing Technology Applications in Construction Safety and Health. J. Constr. Eng. Manag. 2019, 145, 03119007. [Google Scholar] [CrossRef]
- Bruun, E.P.G.; Pastrana, R.; Paris, V.; Beghini, A.; Pizzigoni, A.; Parascho, S.; Adriaenssens, S. Three Cooperative Robotic Fabrication Methods for the Scaffold-Free Construction of a Masonry Arch. Autom. Constr. 2021, 129, 103803. [Google Scholar] [CrossRef]
- Bruckmann, T.; Boumann, R. Simulation and Optimization of Automated Masonry Construction Using Cable Robots. Adv. Eng. Inform. 2021, 50, 101388. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A Reliable and Accurate Indoor Localization Method Using Phone Inertial Sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; Association for Computing Machinery: New York, NY, USA, 2012; Volume 5, pp. 421–430. [Google Scholar]
- Yoon, J.; Lee, B.; Chun, J.; Son, B.; Kim, H. Investigation of the Relationship between Ironworker’s Gait Stability and Different Types of Load Carrying Using Wearable Sensors. Adv. Eng. Inform. 2022, 51, 101521. [Google Scholar] [CrossRef]
- Munguia Tapia, E. Using Machine Learning for Real-Time Activity Recognition and Estimation of Energy Expenditure. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2008. [Google Scholar]
- Mannini, A.; Intille, S.S.; Rosenberger, M.; Sabatini, A.M.; Haskell, W. Activity Recognition Using a Single Accelerometer Placed at the Wrist or Ankle. Med. Sci. Sports Exerc. 2013, 45, 2193–2203. [Google Scholar] [CrossRef]
- Pirttikangas, S.; Fujinami, K.; Nakajima, T. Feature Selection and Activity Recognition from Wearable Sensors. In Proceedings of the Third international conference on Ubiquitous Computing Systems, Seoul, Republic of Korea, 11–13 October 2006; Springer: Berlin/Heidelberg, Germany, 2006; Volume 11, pp. 516–527. [Google Scholar]
- Banos, O.; Galvez, J.-M.; Damas, M.; Pomares, H.; Rojas, I. Window Size Impact in Human Activity Recognition. Sensors 2014, 14, 6474–6499. [Google Scholar] [CrossRef]
- Yu, L.; Qu, J.; Gao, F.; Tian, Y. A Novel Hierarchical Algorithm for Bearing Fault Diagnosis Based on Stacked LSTM. Shock. Vib. 2019, 2019, e2756284. [Google Scholar] [CrossRef]
- Ha, S.; Choi, S. Convolutional Neural Networks for Human Activity Recognition Using Multiple Accelerometer and Gyroscope Sensors. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 381–388. [Google Scholar]
- Ngan, C.-K. Time Series Analysis: Data, Methods, and Applications; BoD—Books on Demand: Norderstedt, Germany, 2019; ISBN 978-1-78984-778-9. [Google Scholar]
- Thambawita, V.; Strümke, I.; Hicks, S.A.; Halvorsen, P.; Parasa, S.; Riegler, M.A. Impact of Image Resolution on Deep Learning Performance in Endoscopy Image Classification: An Experimental Study Using a Large Dataset of Endoscopic Images. Diagnostics 2021, 11, 2183. [Google Scholar] [CrossRef] [PubMed]
- Sabottke, C.F.; Spieler, B.M. The Effect of Image Resolution on Deep Learning in Radiography. Radiol. Artif. Intell. 2020, 2, e190015. [Google Scholar] [CrossRef]
- Al-Saffar, A.A.M.; Tao, H.; Talab, M.A. Review of Deep Convolution Neural Network in Image Classification. In Proceedings of the 2017 International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications (ICRAMET), Jakarta, Indonesia, 23–24 October 2017; pp. 26–31. [Google Scholar]
- Ruder, S. An Overview of Gradient Descent Optimization Algorithms. arXiv 2017, arXiv:1609.04747. [Google Scholar]
- Zhang, Z. Improved Adam Optimizer for Deep Neural Networks. In Proceedings of the 2018 IEEE/ACM 26th International Symposium on Quality of Service (IWQoS), Banff, AB, Canada, 4–6 June 2018; pp. 1–2. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2017, arXiv:1412.6980. [Google Scholar]
- Ding, B.; Qian, H.; Zhou, J. Activation Functions and Their Characteristics in Deep Neural Networks. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 1836–1841. [Google Scholar]
- Shehata, M.E.; El-Gohary, K.M. Towards Improving Construction Labor Productivity and Projects’ Performance. Alex. Eng. J. 2011, 50, 321–330. [Google Scholar] [CrossRef]
- Halligan, D.W.; Demsetz, L.A.; Brown, J.D.; Pace, C.B. Action-Response Model and Loss of Productivity in Construction. J. Constr. Eng. Manag. 1994, 120, 47–64. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Hao, S.; Peng, X.; Hu, L. Deep Learning for Sensor-Based Activity Recognition: A Survey. Pattern Recognit. Lett. 2019, 119, 3–11. [Google Scholar] [CrossRef]
- Ronao, C.A.; Cho, S.-B. Human Activity Recognition with Smartphone Sensors Using Deep Learning Neural Networks. Expert Syst. Appl. 2016, 59, 235–244. [Google Scholar] [CrossRef]
- Mahmud, T.; Akash, S.S.; Fattah, S.A.; Zhu, W.-P.; Ahmad, M.O. Human Activity Recognition From Multi-Modal Wearable Sensor Data Using Deep Multi-Stage LSTM Architecture Based on Temporal Feature Aggregation. In Proceedings of the 2020 IEEE 63rd International Midwest Symposium on Circuits and Systems (MWSCAS), Springfield, MA, USA, 9–12 August 2020; pp. 249–252. [Google Scholar]
- Jarchi, D.; Casson, A.J. Description of a Database Containing Wrist PPG Signals Recorded during Physical Exercise with Both Accelerometer and Gyroscope Measures of Motion. Data 2017, 2, 1. [Google Scholar] [CrossRef]
- McGrath, J.; Neville, J.; Stewart, T.; Cronin, J. Upper Body Activity Classification Using an Inertial Measurement Unit in Court and Field-Based Sports: A Systematic Review. Proceedings of the Institution of Mechanical Engineers. Part P J. Sports Eng. Technol. 2021, 235, 83–95. [Google Scholar] [CrossRef]
- Arifoglu, D.; Bouchachia, A. Activity Recognition and Abnormal Behaviour Detection with Recurrent Neural Networks. Procedia Comput. Sci. 2017, 110, 86–93. [Google Scholar] [CrossRef]
- Pascanu, R.; Gulcehre, C.; Cho, K.; Bengio, Y. How to Construct Deep Recurrent Neural Networks. arXiv 2014, arXiv:1312.6026. [Google Scholar]
- Murad, A.; Pyun, J.-Y. Deep Recurrent Neural Networks for Human Activity Recognition. Sensors 2017, 17, 2556. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.-W.; Yang, M.-Y.; Zeng, H.-J.; Wen, J.-P. Pedestrian Detection Based on Improved LeNet-5 Convolutional Neural Network. J. Algorithms Comput. Technol. 2019, 13, 1748302619873601. [Google Scholar] [CrossRef]
- Guo, T.; Dong, J.; Li, H.; Gao, Y. Simple Convolutional Neural Network on Image Classification. In Proceedings of the 2017 IEEE 2nd International Conference on Big Data Analysis (ICBDA), Beijing, China, 10–12 March 2017; pp. 721–724. [Google Scholar]
- Mashrur, F.R.; Dutta Roy, A.; Saha, D.K. Automatic Identification of Arrhythmia from ECG Using AlexNet Convolutional Neural Network. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 20–22 February 2019; pp. 1–5. [Google Scholar]
- Yuan, Z.-W.; Zhang, J. Feature Extraction and Image Retrieval Based on AlexNet. In Proceedings of the Eighth International Conference on Digital Image Processing (ICDIP 2016), Chengdu, China, 29 August 2016; SPIE: Bellingham, DC, USA, 2016; Volume 10033, pp. 65–69. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height (cm) | Weight (kg) | Age (Years) | |
|---|---|---|---|
| Mean | 174.66 | 71.18 | 40.40 |
| Median | 173.77 | 71.56 | 40 |
| Standard Deviation | 5.57 | 8.68 | 7.02 |
| Min Value | 163.48 | 58.52 | 29 |
| Max Value | 182.52 | 90.89 | 52 |
| LSTM Results | ||||||||||||||||||
| Single Sensor | Dual Sensors | Multiple Sensors | ||||||||||||||||
| Training Accuracy | 0.7208 (72.08%) | 0.7657 (76.57%) | 0.7932 (79.32%) | |||||||||||||||
| Precision | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null |
| 0.734 | 0.649 | 0.931 | 0.674 | 0.905 | 0.449 | 0.938 | 0.728 | 0.945 | 0.669 | 0.964 | 0.518 | 0.975 | 0.761 | 0.958 | 0.747 | 0.994 | 0.518 | |
| Avg. prec. | 0.724 | 0.786 | 0.825 | |||||||||||||||
| Recall | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null |
| 0.933 | 0.626 | 0.793 | 0.662 | 0.879 | 0.558 | 0.939 | 0.642 | 0.847 | 0.698 | 0.889 | 0.700 | 0.958 | 0.670 | 0.861 | 0.701 | 0.925 | 0.771 | |
| Avg. recall | 0.742 | 0.794 | 0.814 | |||||||||||||||
| F1-score | 0.732 | 0.790 | 0.820 | |||||||||||||||
| CNN results | ||||||||||||||||||
| Single Sensor | Dual Sensors | Multiple Sensors | ||||||||||||||||
| Training Accuracy | 0.9051 (90.51%) | 0.9359 (93.59%) | 0.9670 (96.70%) | |||||||||||||||
| Precision | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null |
| 0.939 | 0.892 | 0.929 | 0.967 | 0.982 | 0.708 | 0.901 | 0.965 | 0.976 | 0.902 | 0.999 | 0.825 | 0.958 | 0.960 | 0.962 | 0.990 | 1.000 | 0.910 | |
| Avg. prec. | 0.903 | 0.928 | 0.963 | |||||||||||||||
| Recall | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null | A1 | A2 | A3 | A4 | A5 | Null |
| 1.000 | 0.865 | 0.841 | 0.986 | 1.000 | 0.780 | 1.000 | 0.897 | 0.913 | 0.976 | 1.000 | 0.860 | 1.000 | 0.954 | 0.950 | 0.985 | 1.000 | 0.929 | |
| Avg. recall | 0.912 | 0.941 | 0.970 | |||||||||||||||
| F1-score | 0.907 | 0.935 | 0.967 | |||||||||||||||
| Recurrent Algorithms | RNN Single | RNN Dual | RNN Multiple | DRNN Single | DRNN Dual | DRNN Multiple | LSTM Single | LSTM Dual | LSTM Multiple |
| Accuracy (%) | 71.55 | 74.07 | 76.13 | 71.67 | 74.59 | 77.05 | 72.08 | 76.57 | 79.32 |
| AVG. Recall | 0.569 | 0.598 | 0.629 | 0.659 | 0.671 | 0.709 | 0.742 | 0.794 | 0.814 |
| AVG. Precision | 0.571 | 0.586 | 0.636 | 0.641 | 0.667 | 0.698 | 0.724 | 0.786 | 0.825 |
| F1-Score | 0.570 | 0.592 | 0.632 | 0.650 | 0.669 | 0.703 | 0.732 | 0.790 | 0.820 |
| Convolution Algorithms | LeNET Single | LeNET Dual | LeNET Multiple | AlexNET Single | AlexNET Dual | AlexNET Multiple | CNN Single | CNN Dual | CNN Multiple |
| Accuracy (%) | 86.24 | 90.05 | 93.35 | 88.04 | 91.64 | 94.75 | 90.51 | 93.59 | 96.70 |
| AVG. Recall | 0.724 | 0.734 | 0.796 | 0.754 | 0.810 | 0.851 | 0.912 | 0.941 | 0.970 |
| AVG. Precision | 0.719 | 0.741 | 0.848 | 0.776 | 0.797 | 0.864 | 0.903 | 0.928 | 0.963 |
| F1-Score | 0.721 | 0.737 | 0.821 | 0.765 | 0.803 | 0.857 | 0.907 | 0.935 | 0.967 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, S.; Ham, Y.; Chun, J.; Kim, H. Productivity Measurement through IMU-Based Detailed Activity Recognition Using Machine Learning: A Case Study of Masonry Work. Sensors 2023, 23, 7635. https://doi.org/10.3390/s23177635
Hong S, Ham Y, Chun J, Kim H. Productivity Measurement through IMU-Based Detailed Activity Recognition Using Machine Learning: A Case Study of Masonry Work. Sensors. 2023; 23(17):7635. https://doi.org/10.3390/s23177635
Chicago/Turabian StyleHong, Sungkook, Youngjib Ham, Jaeyoul Chun, and Hyunsoo Kim. 2023. "Productivity Measurement through IMU-Based Detailed Activity Recognition Using Machine Learning: A Case Study of Masonry Work" Sensors 23, no. 17: 7635. https://doi.org/10.3390/s23177635