
INS/LIDAR/Stereo SLAM Integration for Precision Navigation in GNSS-Denied Environments
Abstract
:1. Introduction
2. Navigation System Architecture
2.1. LiDAR SLAM
2.2. Stereo Visual SLAM
2.3. Integrated Navigation Systems
2.3.1. Coordinate Transformations
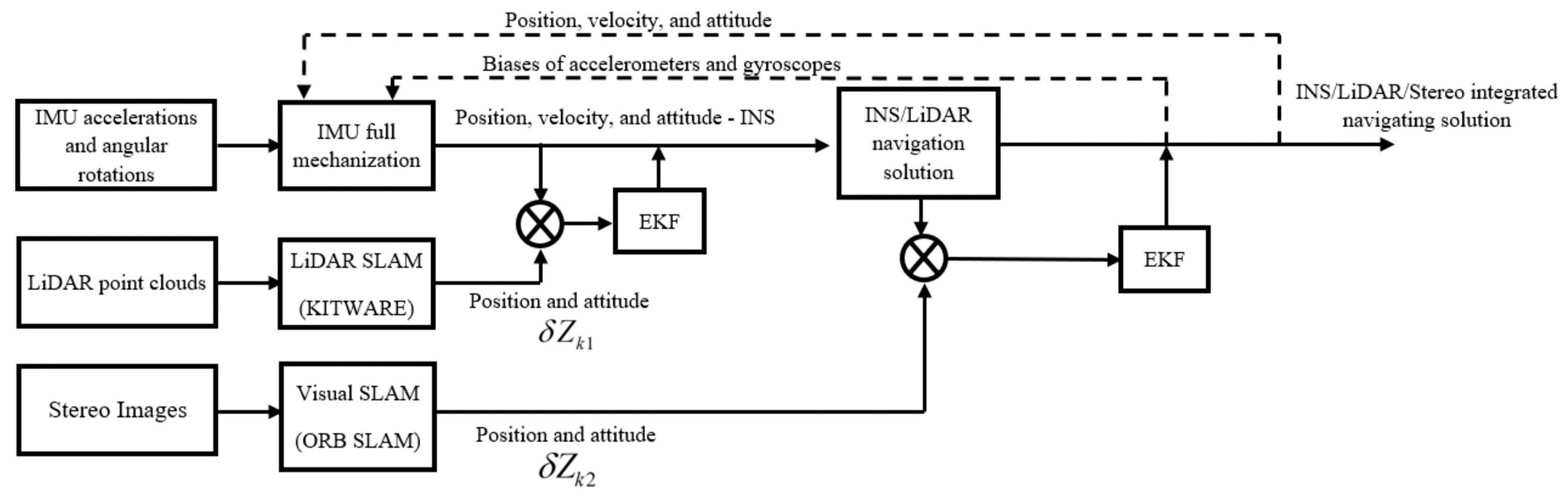
2.3.2. INS/LiDAR/Stereo SLAM Integration
3. Data Acquisition and Description
4. Analysis and Results
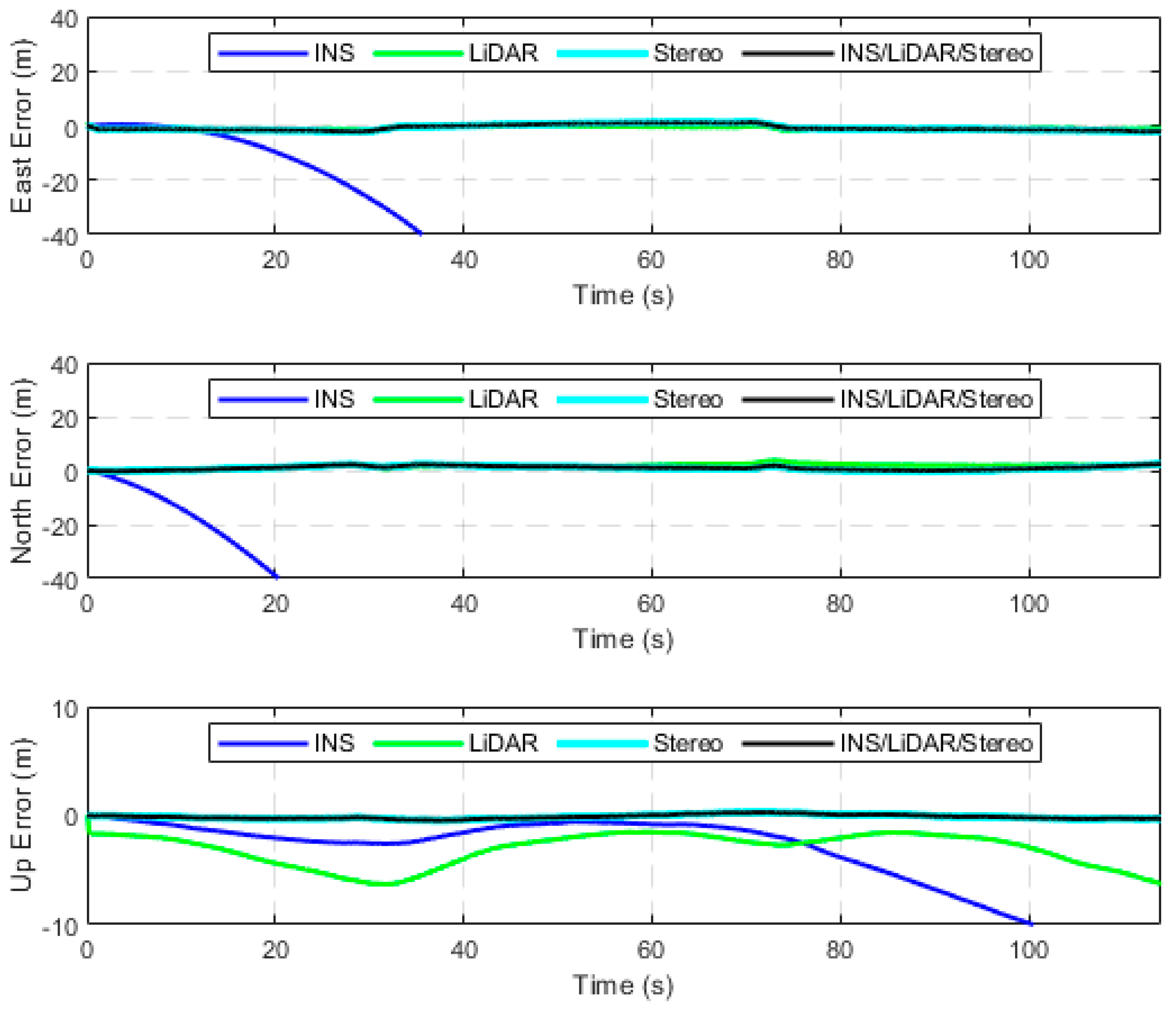
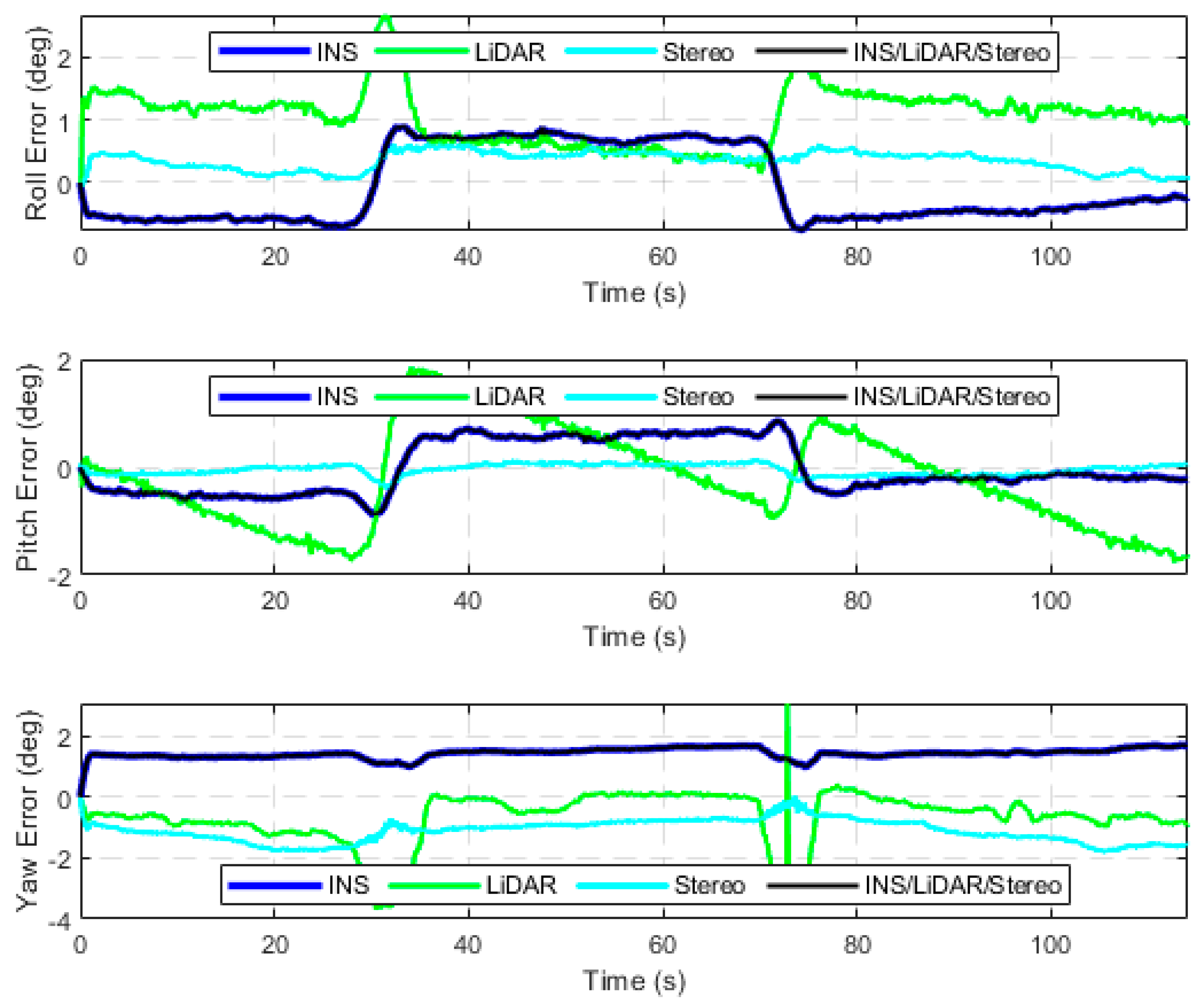
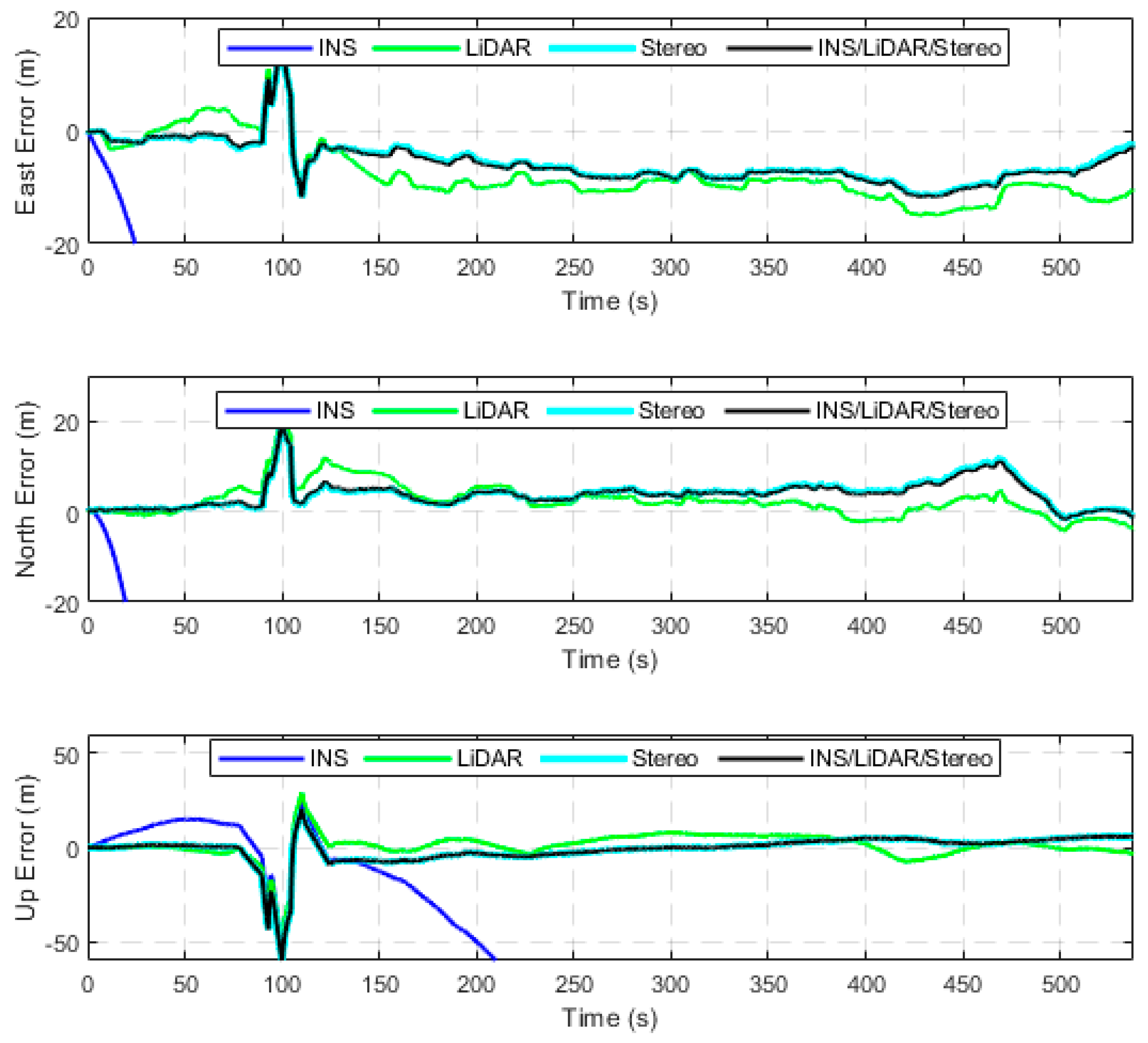
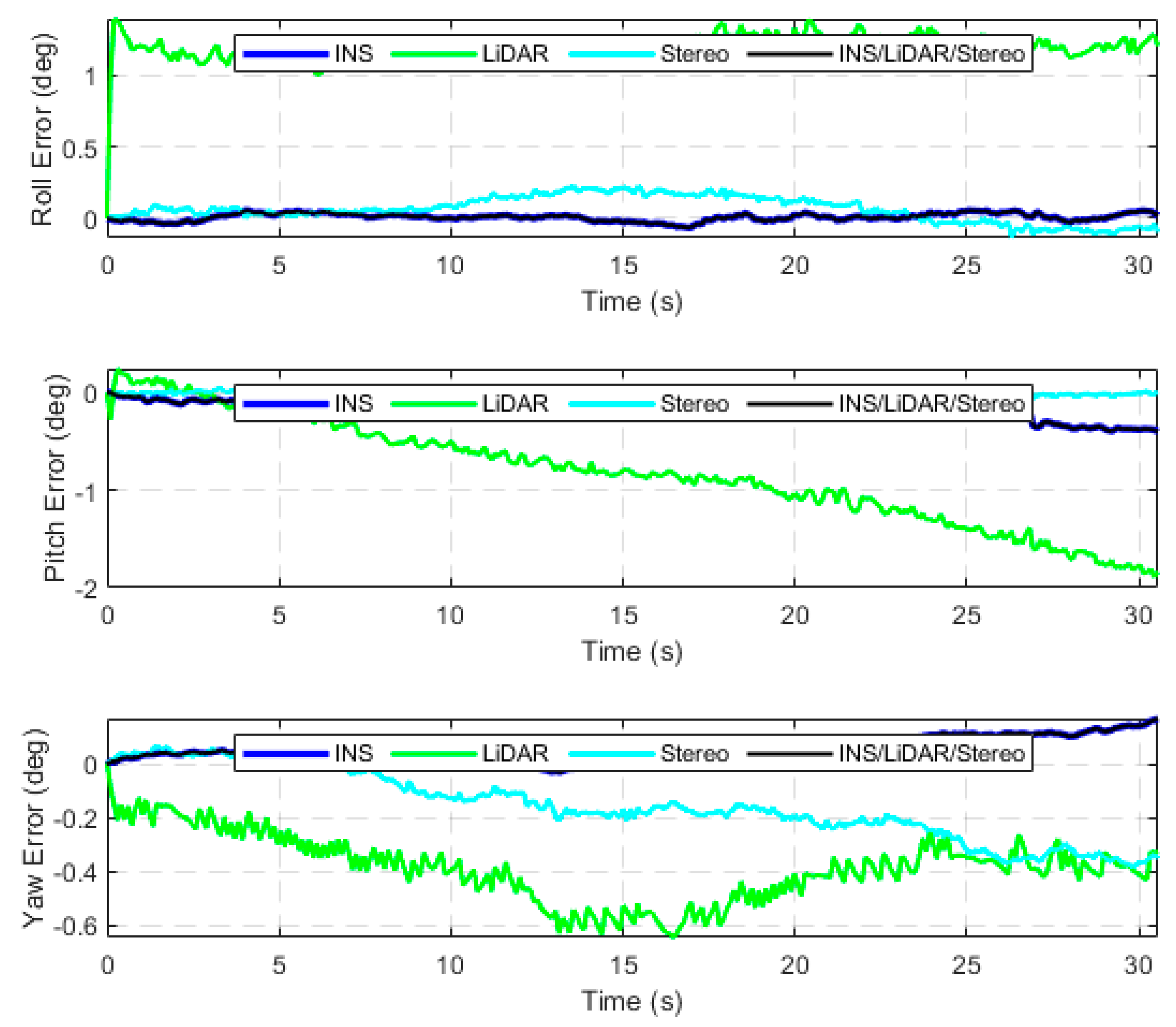
4.1. Residential Datasets—Case Study 1
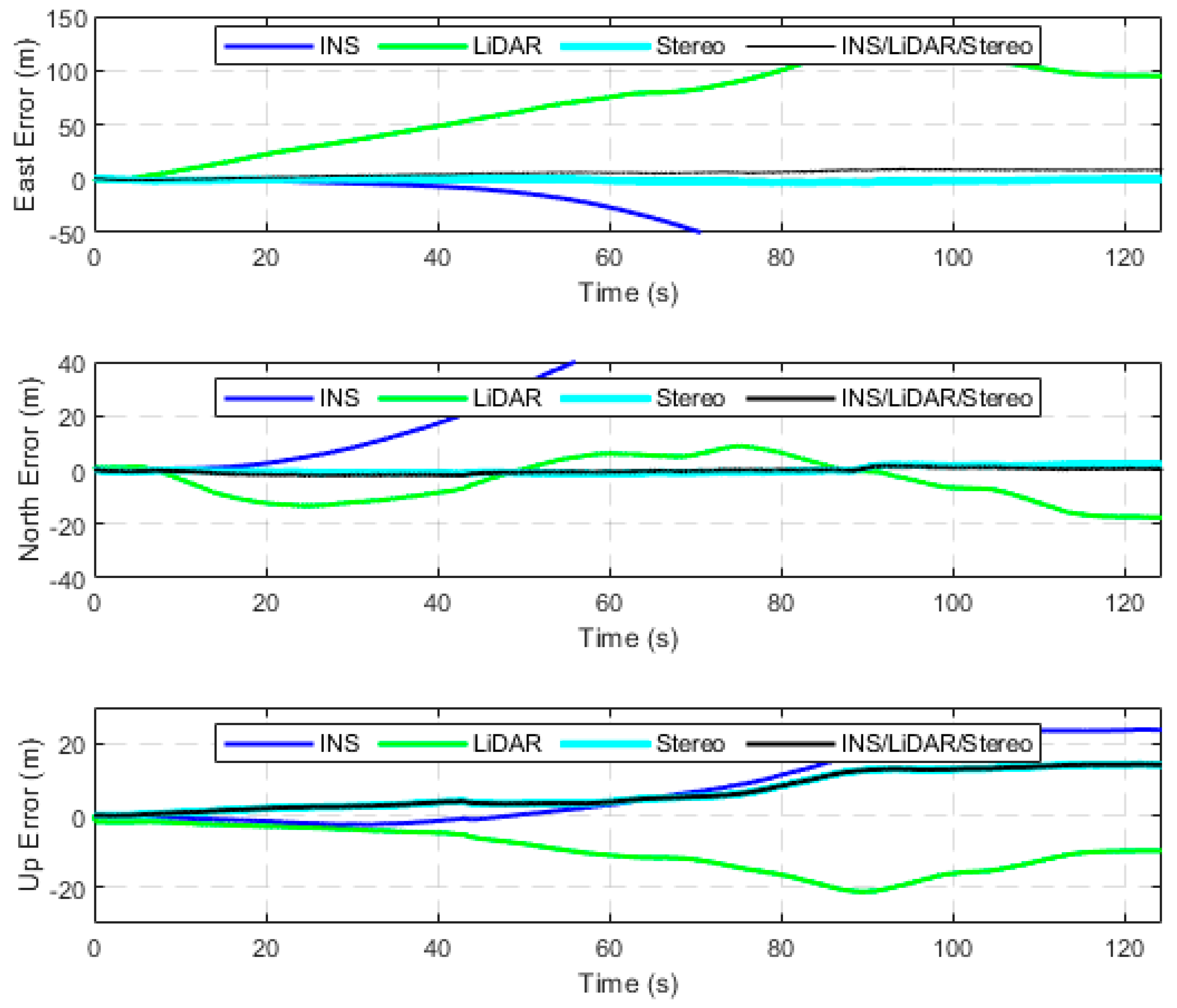
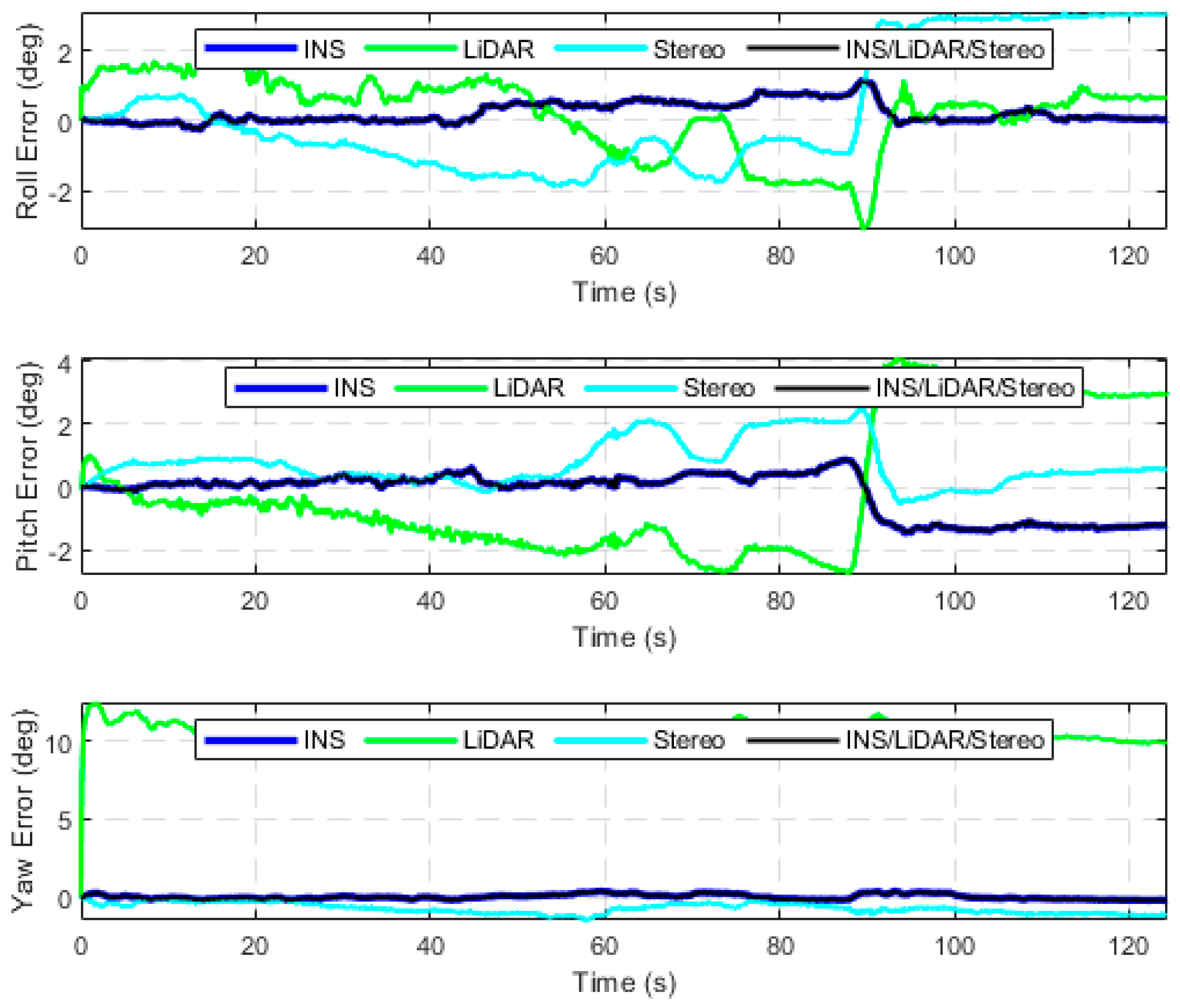
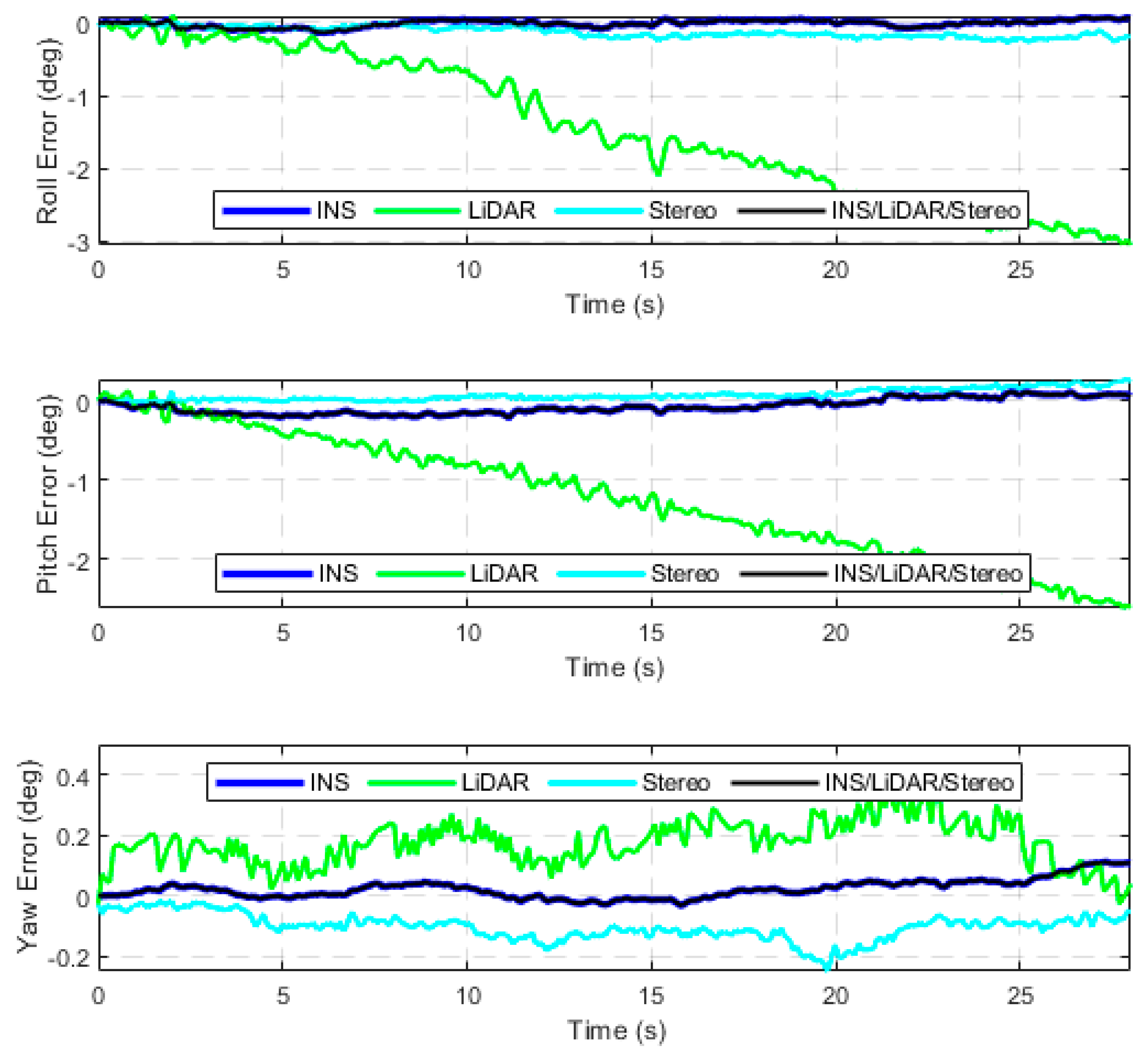
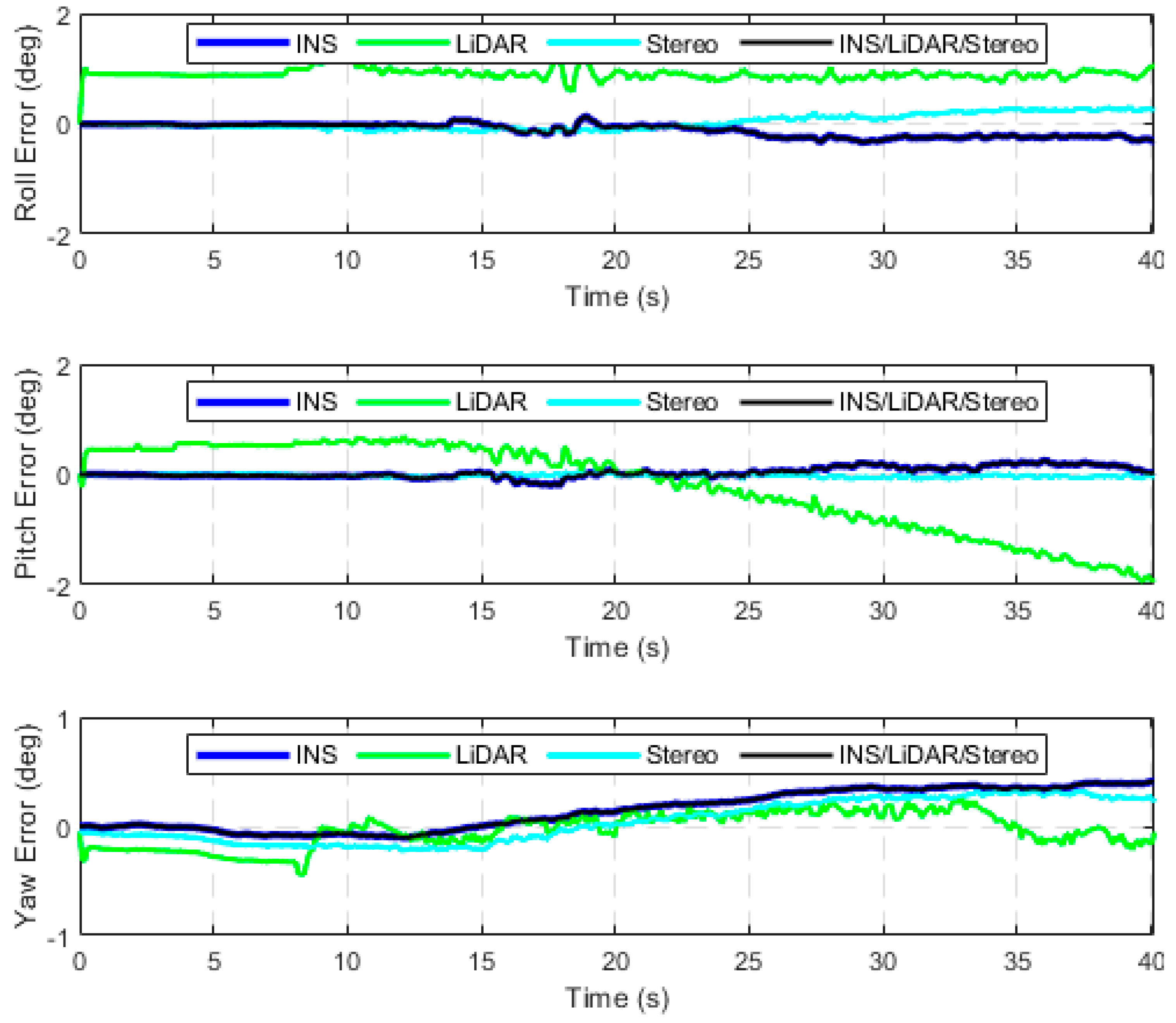
4.2. Highway Datasets—Case Study 2
4.3. Comparison to State-of-the-Art Models
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
















References
- de Ponte Müller, F. Survey on ranging sensors and cooperative techniques for relative positioning of vehicles. Sensors 2017, 17, 271. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Díaz, M.; Soriguera, F. Autonomous vehicles: Theoretical and practical challenges. Transp. Res. Procedia 2018, 33, 275–282. [Google Scholar] [CrossRef]
- Maurer, M.; Gerdes, J.C.; Lenz, B.; Winner, H. Safety Concept for Autonomous Vehicles. In Autonomes Fahren; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Abd Rabbou, M.; El-Rabbany, A. Tightly coupled integration of GPS precise point positioning and MEMS-based inertial systems. GPS Solut. 2015, 19, 601–609. [Google Scholar] [CrossRef]
- Borko, A.; Klein, I.; Even-Tzur, G. GNSS/INS Fusion with Virtual Lever-Arm Measurements. Sensors 2018, 18, 2228. [Google Scholar] [CrossRef] [PubMed]
- Elmezayen, A.; El-Rabbany, A. Ultra-Low-Cost Tightly Coupled Triple-Constellation GNSS PPP/MEMS-Based INS Integration for Land Vehicular Applications. Geomatics 2021, 1, 258–286. [Google Scholar] [CrossRef]
- Elmezayen, A.; El-Rabbany, A. Performance evaluation of real-time tightly-coupled GNSS PPP/MEMS-based inertial integration using an improved robust adaptive Kalman filter. J. Appl. Geodesy 2020, 14, 413–430. [Google Scholar] [CrossRef]
- Li, W.; Fan, P.; Cui, X.; Zhao, S.; Ma, T.; Lu, M. A Low-Cost INS-Integratable GNSS Ultra-Short Baseline Attitude Determination System. Sensors 2018, 18, 2114. [Google Scholar] [CrossRef]
- Li, W.; Li, W.; Cui, X.; Zhao, S.; Lu, M. A Tightly Coupled RTK/INS Algorithm with Ambiguity Resolution in the Position Domain for Ground Vehicles in Harsh Urban Environments. Sensors 2018, 18, 2160. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Han, Y.; Chen, J.; Wang, S.; Zhang, Z.; Du, N.; Zheng, Y.J. A GNSS/INS integrated navigation algorithm based on Kalman filter. IFAC-PapersOnLine 2018, 51, 232–237. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhong, Y.; Zhu, X. Cubature Kalman Filter With Both Adaptability and Robustness for Tightly-Coupled GNSS/INS Integration. IEEE Sens. J. 2021, 21, 14997–15011. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P.; Bartone, C.G. Kalman Filtering; Wiley Telecom: Washington, DC, USA, 2020. [Google Scholar]
- Boguspayev, N.; Akhmedov, D.; Raskaliyev, A.; Kim, A.; Sukhenko, A. A Comprehensive Review of GNSS/INS Integration Techniques for Land and Air Vehicle Applications. Appl. Sci. 2023, 13, 4819. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Ben-Ari, M.; Mondada, F. Elements of Robotics; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef]
- Çelik, K.; Somani, A.K. Monocular Vision SLAM for Indoor Aerial Vehicles. J. Electr. Comput. Eng. 2013, 2013, 374165. [Google Scholar] [CrossRef]
- Tan, W.; Liu, H.; Dong, Z.; Zhang, G.; Bao, H. Robust monocular SLAM in dynamic environments. In Proceedings of the 2013 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, Australia, 1–4 October 2013; pp. 209–218. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-Time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Hwang, S.-Y.; Song, J.-B. Monocular Vision-Based SLAM in Indoor Environment Using Corner, Lamp, and Door Features from Upward-Looking Camera. IEEE Trans. Ind. Electron. (1982) 2011, 58, 4804–4812. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Engel, J.; Stuckler, J.; Cremers, D. Large-scale direct SLAM with stereo cameras. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1935–1942. [Google Scholar]
- Krombach, N.; Droeschel, D.; Houben, S.; Behnke, S. Feature-based visual odometry prior for real-time semi-dense stereo SLAM. Robot. Auton. Syst. 2018, 109, 38–58. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Gomes, T.; Roriz, R.; Cunha, L.; Ganal, A.; Soares, N.; Araújo, T.; Monteiro, J. Evaluation and testing system for automotive LiDAR sensors. Appl. Sci. 2022, 12, 13003. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. Robot. Sci. Syst. 2014, 2, 1–9. [Google Scholar]
- KITTI. Available online: http://www.cvlibs.net/datasets/kitti/eval_odometry.php (accessed on 1 December 2022).
- KITWARE. Available online: https://gitlab.kitware.com/keu-computervision/slam (accessed on 1 May 2020).
- A-LOAM. Available online: https://github.com/HKUST-Aerial-Robotics/A-LOAM (accessed on 5 October 2022).
- F-LOAM. Available online: https://github.com/wh200720041/floam (accessed on 6 May 2022).
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and ground-optimized lidar odometry and mapping on variable terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Abdelaziz, N.; El-Rabbany, A. An Integrated INS/LiDAR SLAM Navigation System for GNSS-Challenging Environments. Sensors 2022, 22, 4327. [Google Scholar] [CrossRef] [PubMed]
- Elamin, A.; Abdelaziz, N.; El-Rabbany, A. A GNSS/INS/LiDAR Integration Scheme for UAV-Based Navigation in GNSS-Challenging Environments. Sensors 2022, 22, 9908. [Google Scholar] [CrossRef] [PubMed]
- Aboutaleb, A.; El-Wakeel, A.S.; Elghamrawy, H.; Noureldin, A. Lidar/riss/gnss dynamic integration for land vehicle robust positioning in challenging gnss environments. Remote Sens. 2020, 12, 2323. [Google Scholar] [CrossRef]
- Chu, T.; Guo, N.; Backén, S.; Akos, D. Monocular camera/IMU/GNSS integration for ground vehicle navigation in challenging GNSS environments. Sensors 2012, 12, 3162–3185. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. arXiv 2021, arXiv:2007.11898. [Google Scholar] [CrossRef]
- UZ-SLAMlab ORB_SLAM3. Available online: https://github.com/UZ-SLAMLab/ORB_SLAM3 (accessed on 15 June 2023).
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- KITTI. Available online: http://www.cvlibs.net/datasets/kitti/ (accessed on 10 March 2023).
- Google Earth. Available online: https://earth.google.com/web/ (accessed on 2 March 2023).
- LeGO-LOAM. Available online: https://github.com/Mitchell-Lee-93/kitti-lego-loam (accessed on 5 May 2022).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drive Label | Drive Number | Length (m) | Time (s) | Average Speed (km/h) | No. of Frames |
|---|---|---|---|---|---|
| Residential datasets | |||||
| D-27 | 2011_10_03_drive_0027_sync | 3669.18 | 465.97 | 28.35 | 4497 |
| D-33 | 2011_09_30_drive_0033_sync | 1709.57 | 165.31 | 37.23 | 1594 |
| D-34-d | 2011_09_30_drive_0034_sync | 920.52 | 126.88 | 26.12 | 1224 |
| D-34 | 2011_10_03_drive_0034_sync | 5043.67 | 481.31 | 37.72 | 4642 |
| D-20 | 2011_09_30_drive_0020_sync | 1233.74 | 114.49 | 38.79 | 1104 |
| D-27-d | 2011_09_30_drive_0027_sync | 692.47 | 114.85 | 21.71 | 1106 |
| D-28 | 2011_09_30_drive_0028_sync | 4208.65 | 537.78 | 28.17 | 5177 |
| Highway datasets | |||||
| D-42 | 2011_10_03_drive_0042_sync | 2591.80 | 121.19 | 76.99 | 1170 |
| D-15 | 2011_09_26_drive_0015_sync | 362.81 | 30.65 | 42.61 | 297 |
| D-101 | 2011_09_26_drive_0101_sync | 1299.13 | 96.62 | 48.40 | 936 |
| D-16 | 2011_09_30_drive_0016_sync | 404.71 | 28.84 | 50.52 | 278 |
| INS | LiDAR | Stereo | INS/LiDAR/Stereo | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 485.60 | 795.29 | 1556.31 | −5.33 | 6.46 | 13.75 | −4.66 | 7.28 | 16.76 | −4.72 | 6.90 | 15.00 |
| North | 718.27 | 1840.00 | 5986.33 | −25.25 | 26.30 | 36.37 | 3.73 | 6.51 | 12.98 | 1.09 | 4.75 | 8.93 |
| Horizontal | 1524.50 | 2004.51 | 6046.38 | 26.05 | 27.08 | 37.68 | 8.67 | 9.76 | 17.91 | 7.34 | 8.38 | 15.31 |
| Up | 169.47 | 322.74 | 1082.86 | 29.38 | 33.62 | 60.78 | 5.68 | 6.22 | 11.05 | 5.68 | 6.22 | 11.04 |
| Roll | 0.237 | 2.022 | 6.144 | 0.647 | 3.111 | 6.706 | 0.258 | 1.051 | 2.379 | 0.232 | 2.020 | 6.190 |
| Pitch | −0.051 | 2.655 | 6.298 | −0.420 | 3.559 | 6.475 | 0.123 | 0.820 | 2.595 | −0.048 | 2.671 | 6.350 |
| Yaw | 0.932 | 1.072 | 4.015 | −1.254 | 1.601 | 4.383 | 0.831 | 0.980 | 4.880 | 0.966 | 1.119 | 4.083 |
| INS | LiDAR | Stereo | INS/LiDAR/Stereo | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −129.93 | 194.98 | 502.57 | 10.79 | 17.82 | 35.49 | 10.53 | 16.23 | 31.39 | 10.56 | 16.36 | 31.65 |
| North | 27.09 | 32.69 | 50.88 | −22.50 | 25.72 | 34.33 | −13.12 | 14.29 | 18.42 | −13.98 | 15.25 | 19.91 |
| Horizontal | 135.94 | 197.70 | 502.70 | 26.86 | 31.28 | 48.39 | 19.32 | 21.63 | 34.70 | 19.90 | 22.36 | 35.66 |
| Up | 17.93 | 22.23 | 40.58 | 123.55 | 161.39 | 285.49 | 8.73 | 10.70 | 17.86 | 8.73 | 10.70 | 17.86 |
| Roll | −0.225 | 0.557 | 1.421 | 0.026 | 4.820 | 15.838 | 0.730 | 0.797 | 1.357 | −0.224 | 0.555 | 1.419 |
| Pitch | −0.266 | 0.570 | 1.201 | −4.770 | 8.955 | 15.270 | 0.436 | 0.526 | 0.916 | −0.266 | 0.570 | 1.202 |
| Yaw | 0.130 | 0.299 | 0.682 | −0.328 | 1.260 | 2.654 | −1.144 | 1.566 | 2.465 | 0.129 | 0.297 | 0.677 |
| INS/LiDAR/Stereo, RMSE (m) | INS/LiDAR, RMSE (m) | Accuracy Improvement (%) | |
|---|---|---|---|
| D-28 | |||
| Horizontal | 8.40 | 15.06 | 44.22 |
| Up | 7.83 | 13.57 | 42.30 |
| D-42 | |||
| Horizontal | 22.36 | 32.15 | 30.45 |
| Up | 10.70 | 23.58 | 54.62 |
| D-101 | |||
| Horizontal | 3.67 | 14.82 | 75.24 |
| Up | 0.41 | 6.03 | 93.20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelaziz, N.; El-Rabbany, A. INS/LIDAR/Stereo SLAM Integration for Precision Navigation in GNSS-Denied Environments. Sensors 2023, 23, 7424. https://doi.org/10.3390/s23177424
Abdelaziz N, El-Rabbany A. INS/LIDAR/Stereo SLAM Integration for Precision Navigation in GNSS-Denied Environments. Sensors. 2023; 23(17):7424. https://doi.org/10.3390/s23177424
Chicago/Turabian StyleAbdelaziz, Nader, and Ahmed El-Rabbany. 2023. "INS/LIDAR/Stereo SLAM Integration for Precision Navigation in GNSS-Denied Environments" Sensors 23, no. 17: 7424. https://doi.org/10.3390/s23177424