
Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption

Abstract
:1. Introduction
2. Force Analysis of Spherical Robot Moving on Ground and Hill
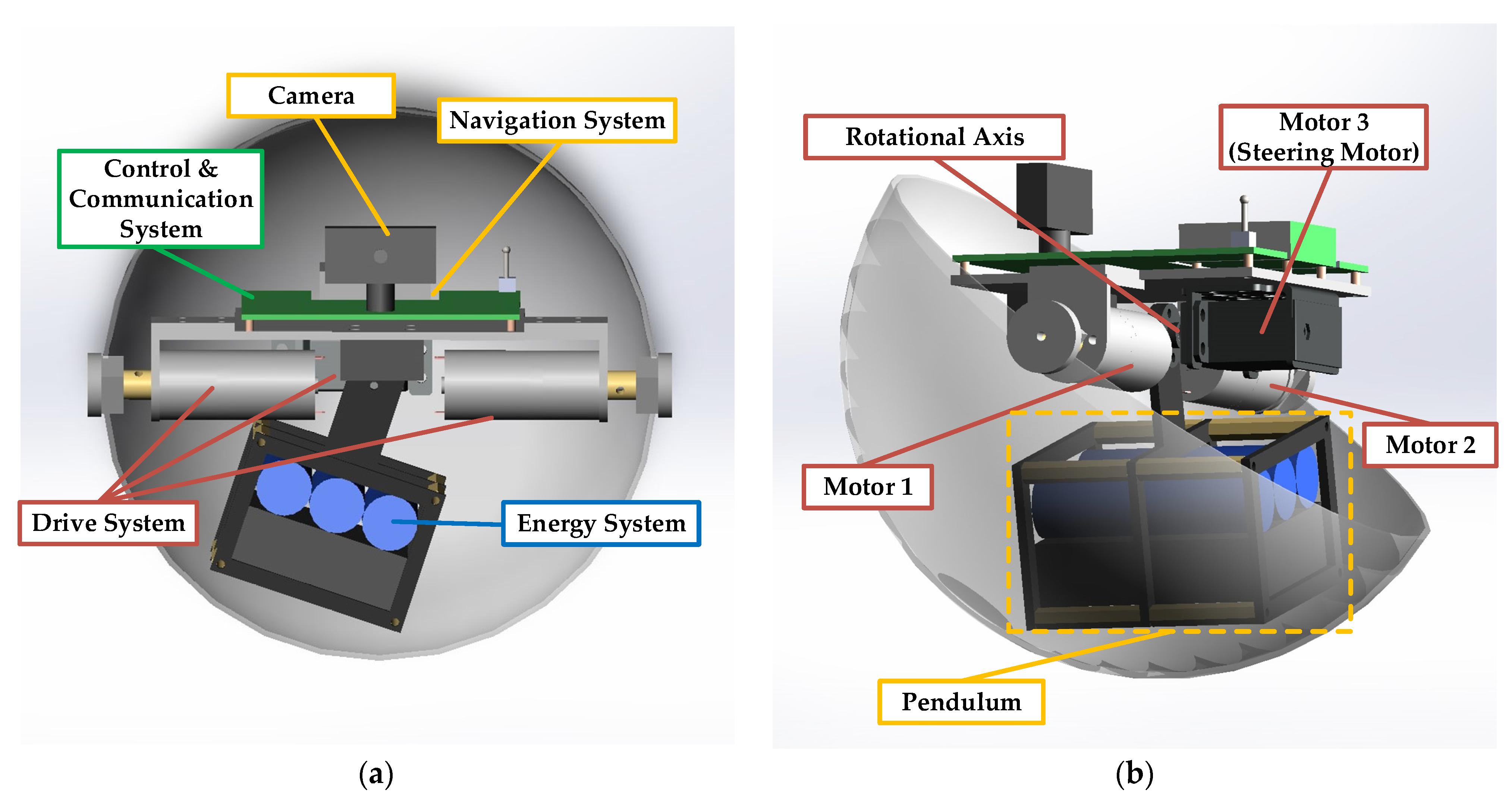
2.1. Structure of a Spherical Robot
2.2. Force Analysis of Spherical Robot
3. Improved A* Algorithm of Spherical Robot Considering Energy Consumption
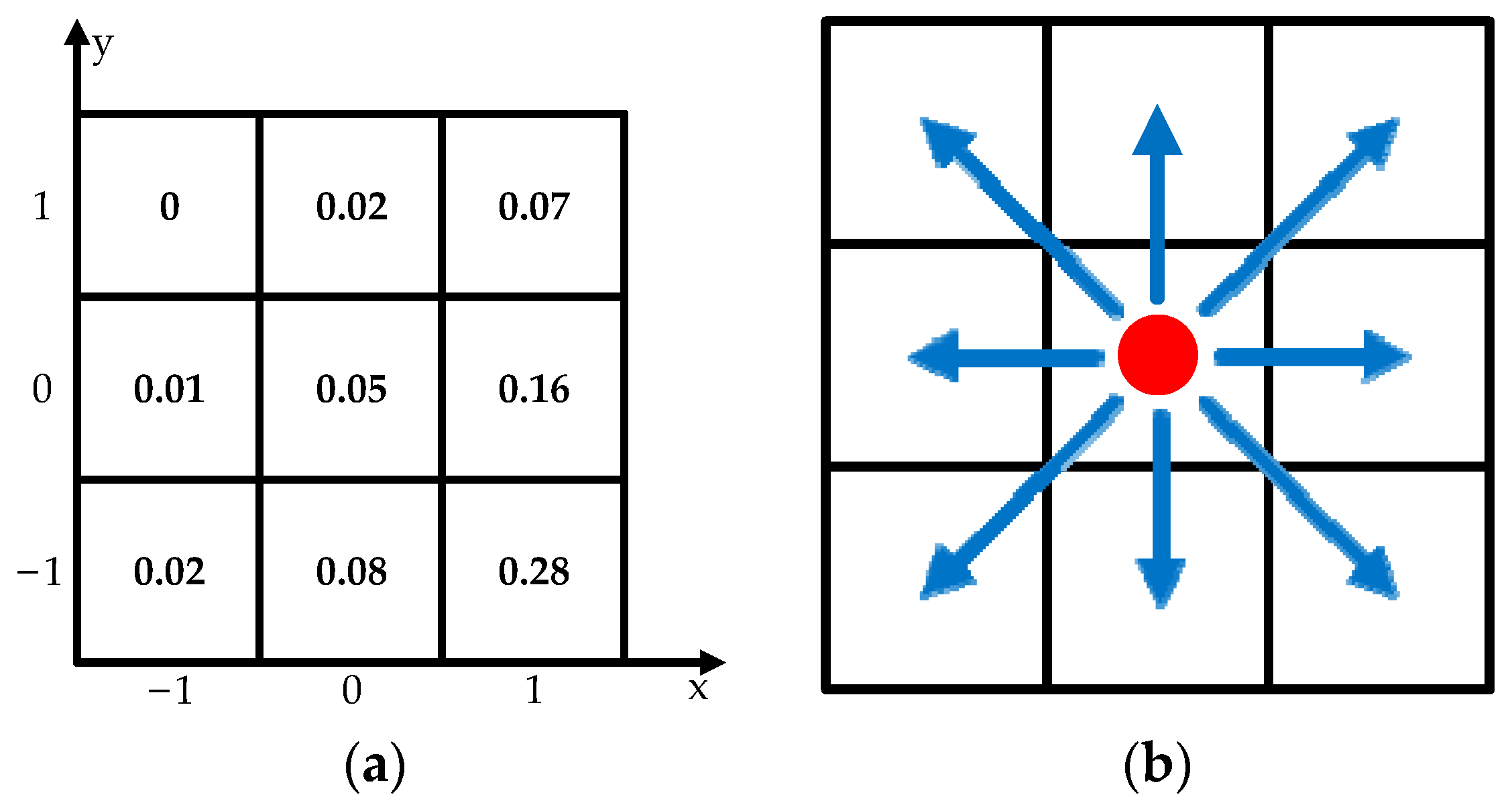
3.1. Traditional A* Algorithm
3.2. Slope Angle Calculation on a 3D Map
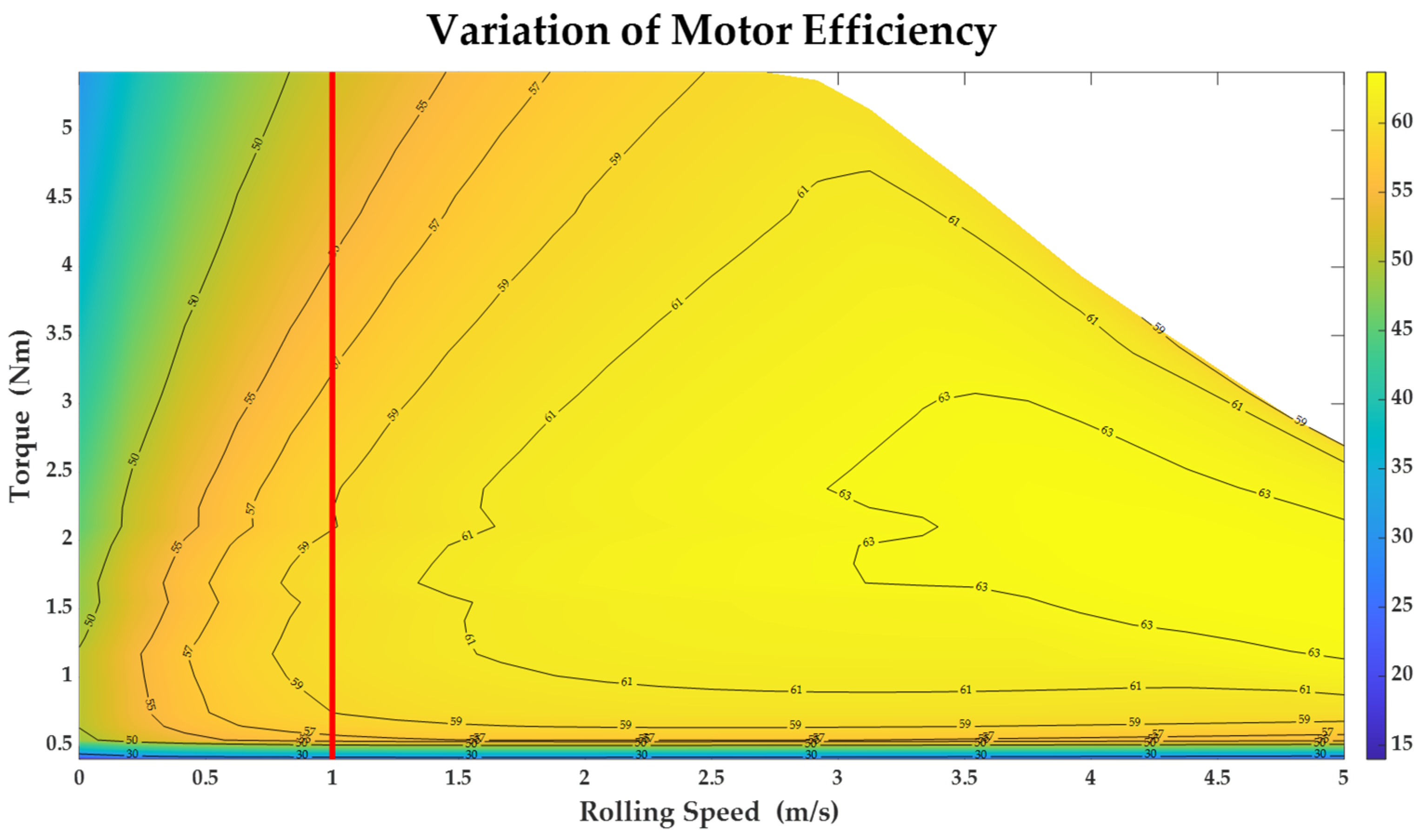
3.3. Energy Consumption Estimation Model
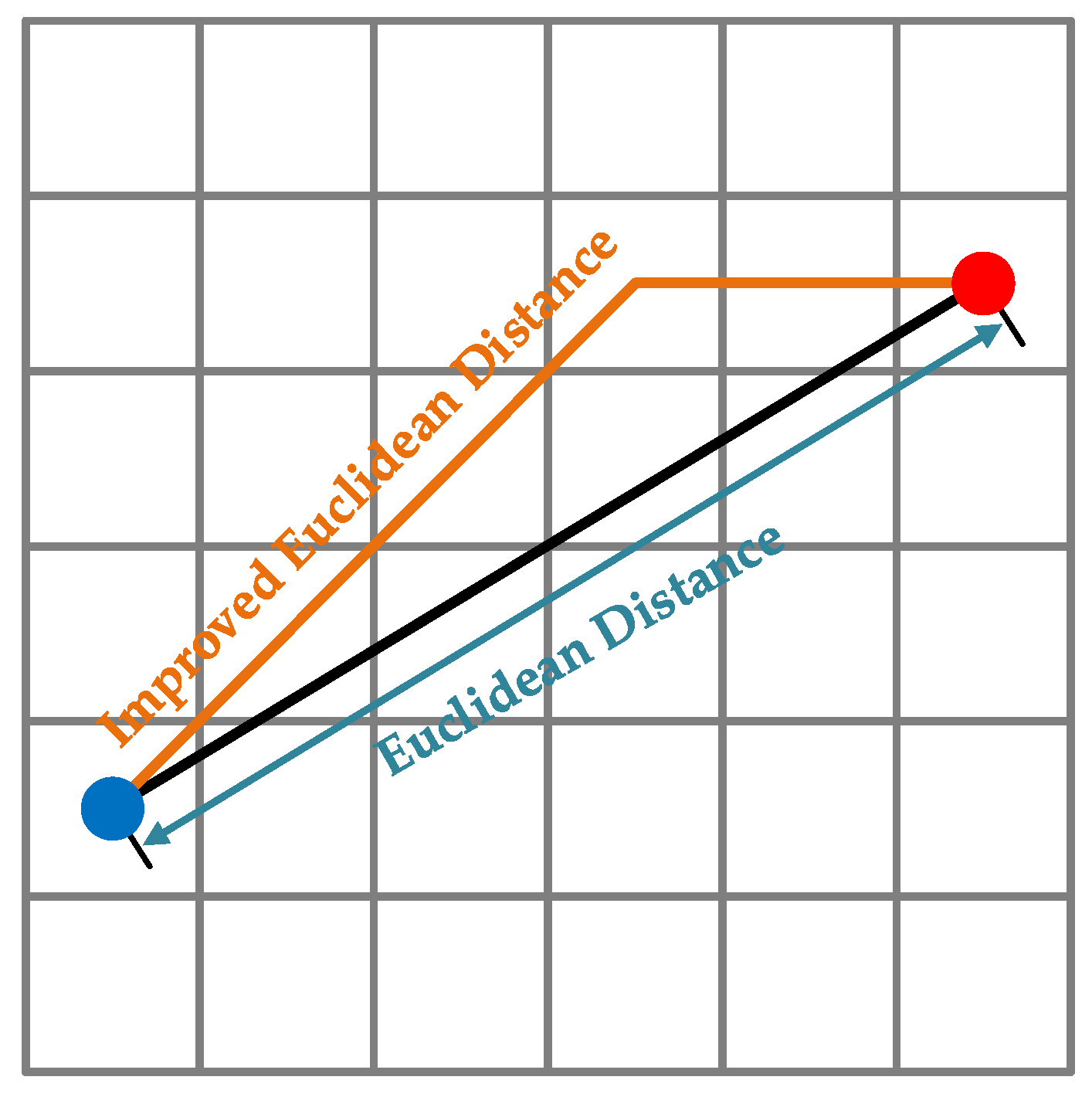
3.4. Distance Estimation Model
3.5. Improved A* Algorithm Considering Energy Consumption
| Algorithm 1 Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption |
/*Initialization*/
|
/*Iterative search*/
|
4. Simulations and Discussion
4.1. Simulation Scene
4.2. Simulation Using Traditional A* Algorithm
4.3. Simulations Using Improved A* Algorithm
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Buzachis, A.; Celesti, A.; Galletta, A.; Wan, J.; Fazio, M. Evaluating an Application Aware Distributed Dijkstra Shortest Path Algorithm in Hybrid Cloud/Edge Environments. IEEE Trans. Sustain. Comput. 2022, 7, 289–298. [Google Scholar] [CrossRef]
- Votion, J.; Cao, Y. Diversity-Based Cooperative Multivehicle Path Planning for Risk Management in Costmap Environments. IEEE Trans. Ind. Electron. 2019, 66, 6117–6127. [Google Scholar] [CrossRef]
- Li, J.; Deng, G.; Luo, C.; Lin, Q.; Yan, Q.; Ming, Z. A Hybrid Path Planning Method in Unmanned Air/Ground Vehicle (UAV/UGV) Cooperative Systems. IEEE Trans. Veh. Technol. 2016, 65, 9585–9596. [Google Scholar] [CrossRef]
- Traish, J.; Tulip, J.; Moore, W. Optimization Using Boundary Lookup Jump Point Search. IEEE Trans. Comput. Intell. AI Games 2016, 8, 268–277. [Google Scholar] [CrossRef]
- Zhang, W.; Shan, L.; Chang, L.; Dai, Y. SVF-RRT*: A Stream-Based VF-RRT* for USVs Path Planning Considering Ocean Currents. IEEE Robot. Autom. Lett. 2023, 8, 2413–2420. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L. An Improved PSO Algorithm for Smooth Path Planning of Mobile Robots Using Continuous High-Degree Bezier Curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-Objective Multi-Robot Path Planning in Continuous Environment Using an Enhanced Genetic Algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Miao, C.; Chen, G.; Yan, C.; Wu, Y. Path Planning Optimization of Indoor Mobile Robot Based on Adaptive Ant Colony Algorithm. Comput. Ind. Eng. 2021, 156, 107230. [Google Scholar] [CrossRef]
- Chen, P.; Pei, J.; Lu, W.; Li, M. A Deep Reinforcement Learning Based Method for Real-Time Path Planning and Dynamic Obstacle Avoidance. Neurocomputing 2022, 497, 64–75. [Google Scholar] [CrossRef]
- Guo, J.; Li, C.; Guo, S. Study on the Path Planning of the Spherical Mobile Robot Based on Fuzzy Control. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2019; pp. 1419–1424. [Google Scholar]
- Guo, J.; Li, C.; Guo, S. A Novel Step Optimal Path Planning Algorithm for the Spherical Mobile Robot Based on Fuzzy Control. IEEE Access 2020, 8, 1394–1405. [Google Scholar] [CrossRef]
- Zhang, Q.; Jia, Q.; Sun, H.; Gao, G. Single Image-Based Path Planning for a Spherical Robot. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010; pp. 1879–1884. [Google Scholar]
- Zheng, L.; Tang, Y.; Guo, S.; Ma, Y.; Deng, L. Dynamic Analysis and Path Planning of a Turtle-Inspired Amphibious Spherical Robot. Micromachines 2022, 13, 2130. [Google Scholar] [CrossRef] [PubMed]
- Joshi, V.A.; Banavar, R.N. Motion Analysis of a Spherical Mobile Robot. Robotica 2009, 27, 343–353. [Google Scholar] [CrossRef]
- Zhang, Z.; Wan, Y.; Wang, Y.; Guan, X.; Ren, W.; Li, G. Improved Hybrid A* Path Planning Method for Spherical Mobile Robot Based on Pendulum. Int. J. Adv. Robot. Syst. 2021, 18, 172988142199295. [Google Scholar] [CrossRef]
- Wang, Y.; Guan, X.; Hu, T.; Zhang, Z.; Wang, Y.; Wang, Z.; Liu, Y.; Li, G. Fuzzy PID Controller Based on Yaw Angle Prediction of a Spherical Robot. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3242–3247. [Google Scholar]
- Sabet, S.; Poursina, M.; Nikravesh, P.E.; Reverdy, P.; Agha-Mohammadi, A.-A. Dynamic Modeling, Energy Analysis, and Path Planning of Spherical Robots on Uneven Terrains. IEEE Robot. Autom. Lett. 2020, 5, 6049–6056. [Google Scholar] [CrossRef]
- Liu, G.; Shu, C.; Liang, Z.; Peng, B.; Cheng, L. A Modified Sparrow Search Algorithm with Application in 3d Route Planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Yuan, X.; Shi, K.; Liu, Z.; Wu, X. A 3-D Multi-Object Path Planning Method for Electric Vehicle Considering the Energy Consumption and Distance. IEEE Trans. Intell. Transport. Syst. 2022, 23, 7508–7520. [Google Scholar] [CrossRef]
- Shi, W.; Li, J.; Cheng, N.; Lyu, F.; Zhang, S.; Zhou, H.; Shen, X. Multi-Drone 3-D Trajectory Planning and Scheduling in Drone-Assisted Radio Access Networks. IEEE Trans. Veh. Technol. 2019, 68, 8145–8158. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Yang, Y.; Wu, D.; Zhang, Z.; Ma, X. Mission-Oriented 3D Path Planning for High-Altitude Long-Endurance Solar-Powered UAVs With Optimal Energy Management. IEEE Access 2020, 8, 227629–227641. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, J.; Dai, J.; He, C. A Novel Real-Time Penetration Path Planning Algorithm for Stealth UAV in 3D Complex Dynamic Environment. IEEE Access 2020, 8, 122757–122771. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traditional A* Algorithm | Improved A* Algorithm | Comparison | |
|---|---|---|---|
| Path length | 35.314 m | 36.731 m | +4.0% |
| Energy consumption | 614.196 J | 552.432 J | −10.1% |
| k | Path Length (m) | Energy Consumption (J) | Closed list Points Number | Time Cost (s) |
|---|---|---|---|---|
| 0.10 | 37.859 | 573.891 | 600 | 112.229169 |
| 0.12 | 37.859 | 573.891 | 667 | 115.875186 |
| 0.14 | 37.288 | 564.846 | 703 | 117.951924 |
| 0.16 | 37.280 | 560.933 | 739 | 125.747523 |
| 0.18 | 37.280 | 560.933 | 764 | 130.431161 |
| 0.20 | 37.281 | 559.278 | 773 | 131.826470 |
| 0.22 | 37.185 | 559.104 | 796 | 136.268961 |
| 0.24 | 36.731 | 552.432 | 794 | 141.816453 |
| 0.26 | 36.731 | 552.432 | 799 | 146.055316 |
| 0.28 | 36.731 | 552.432 | 802 | 153.551163 |
| 0.30 | 36.731 | 552.432 | 811 | 165.043557 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, H.; Ying, Z.; Chen, Z.; Zu, W.; Liu, C.; Jin, Y. Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption. Sensors 2023, 23, 7115. https://doi.org/10.3390/s23167115
Ge H, Ying Z, Chen Z, Zu W, Liu C, Jin Y. Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption. Sensors. 2023; 23(16):7115. https://doi.org/10.3390/s23167115
Chicago/Turabian StyleGe, Hao, Zhanfeng Ying, Zhihua Chen, Wei Zu, Chunzheng Liu, and Yicong Jin. 2023. "Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption" Sensors 23, no. 16: 7115. https://doi.org/10.3390/s23167115