


A Methodology to Model the Rain and Fog Effect on the Performance of Automotive LiDAR Sensors

 , , ,
, , ,
Abstract
:1. Introduction
2. Working Principle
3. Related Work and Introduction of a Novel Approach
4. Modeling of the Rain and Fog Effect in the Virtual LiDAR Sensor
4.1. Scan Module
4.2. Rain Module
Virtual Rain Generation
4.3. Marshall–Palmer Distribution
4.4. Physical Rain Model
4.5. Interaction Between the Electromagnetic Waves and Hydrometeors
Mie Scattering Theory
4.6. Calculation of Extinction Coefficients
4.7. Calculation of Backscattered Coefficients
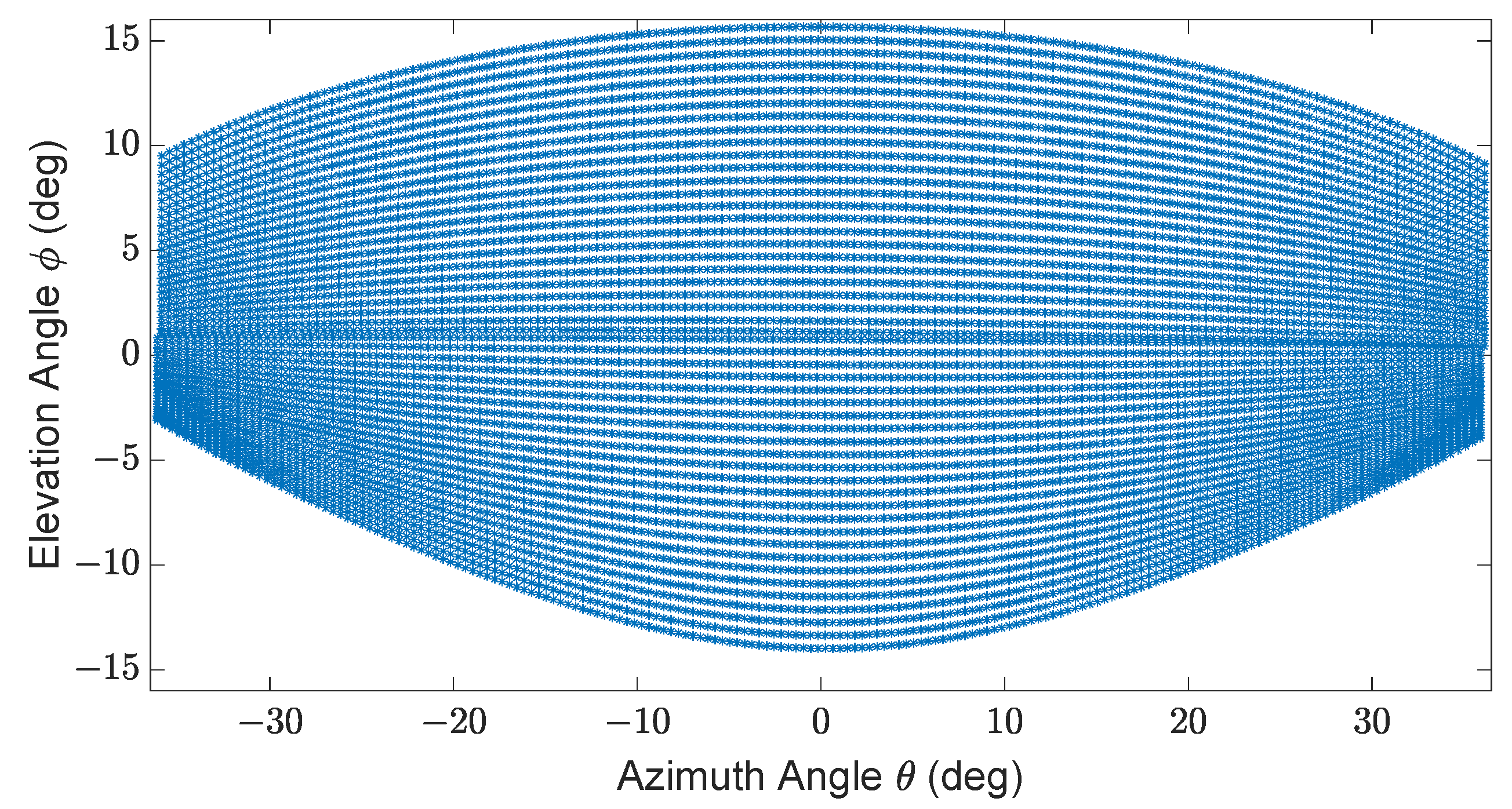
4.8. Beam Characteristics
4.9. Fog Module
4.10. Link Budget Module
4.11. Detector Module
4.12. Circuit Module
4.13. Ranging Module
5. Results
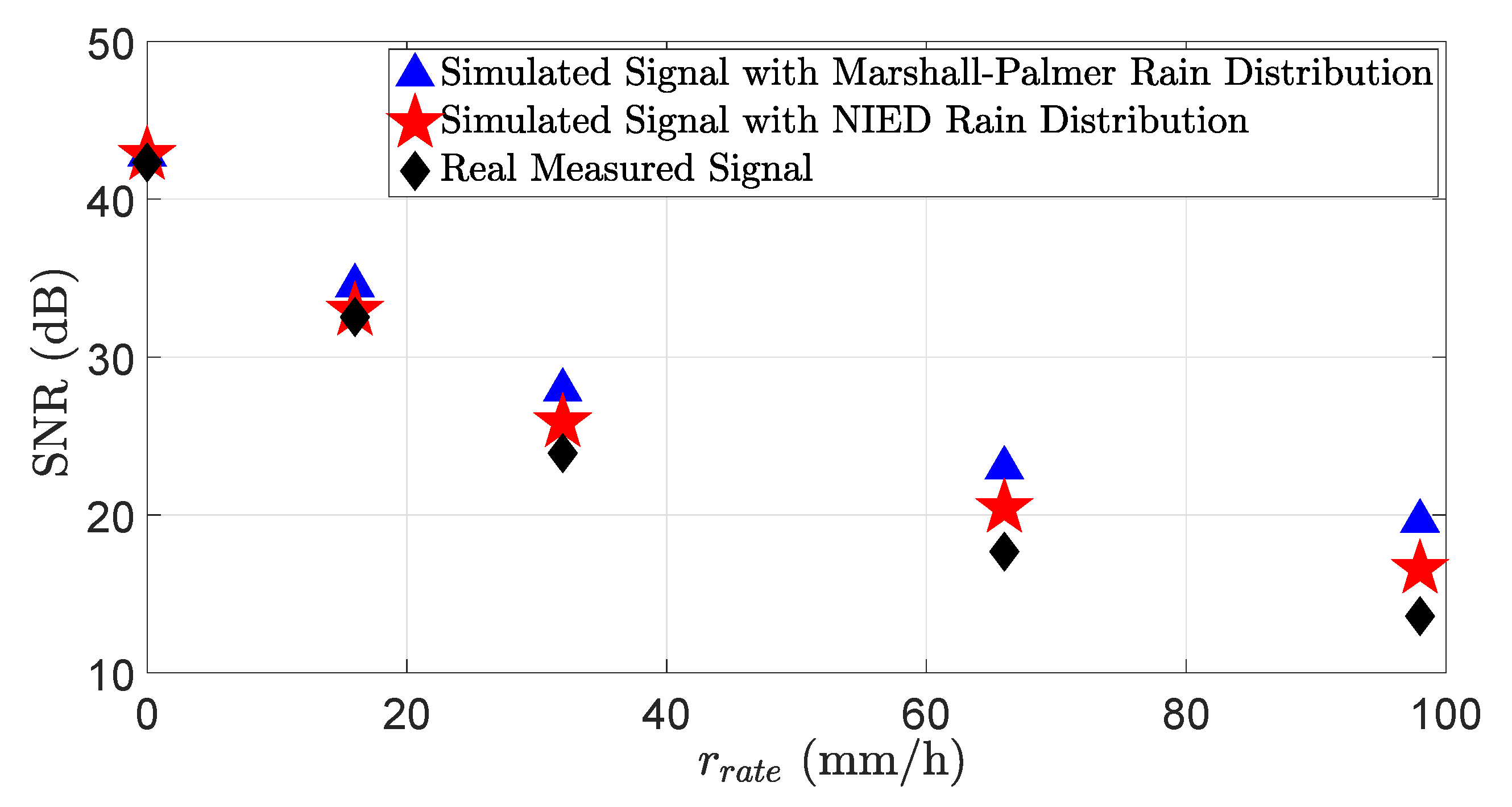
5.1. Validation of the Rain Effect Modeling on the Time Domain Level
5.2. Validation of the Rain Effect Modeling on the Point Cloud Level
- The DR is defined as the ratio between the number of returns obtained from both real and simulated objects of interest (OOI) in rainy and dry conditions. It can be written as:It should be noted that the number of points obtained from OOI in rainy and dry conditions are the mean over all measurements of the same scenario.
- The FDR of the LiDAR sensor in rainy conditions can be written as:where is the total number of reflections from the sensor minimum detection range to the simulated and real OOI, and it does not contain any reflection from the OOI’s surroundings. and depict the LiDAR returns from the surface of the simulated and real OOI in rainy and dry conditions. It should be noted that the number of LiDAR reflections obtained under rainy and dry conditions are the mean over all measurements of the same scenario.
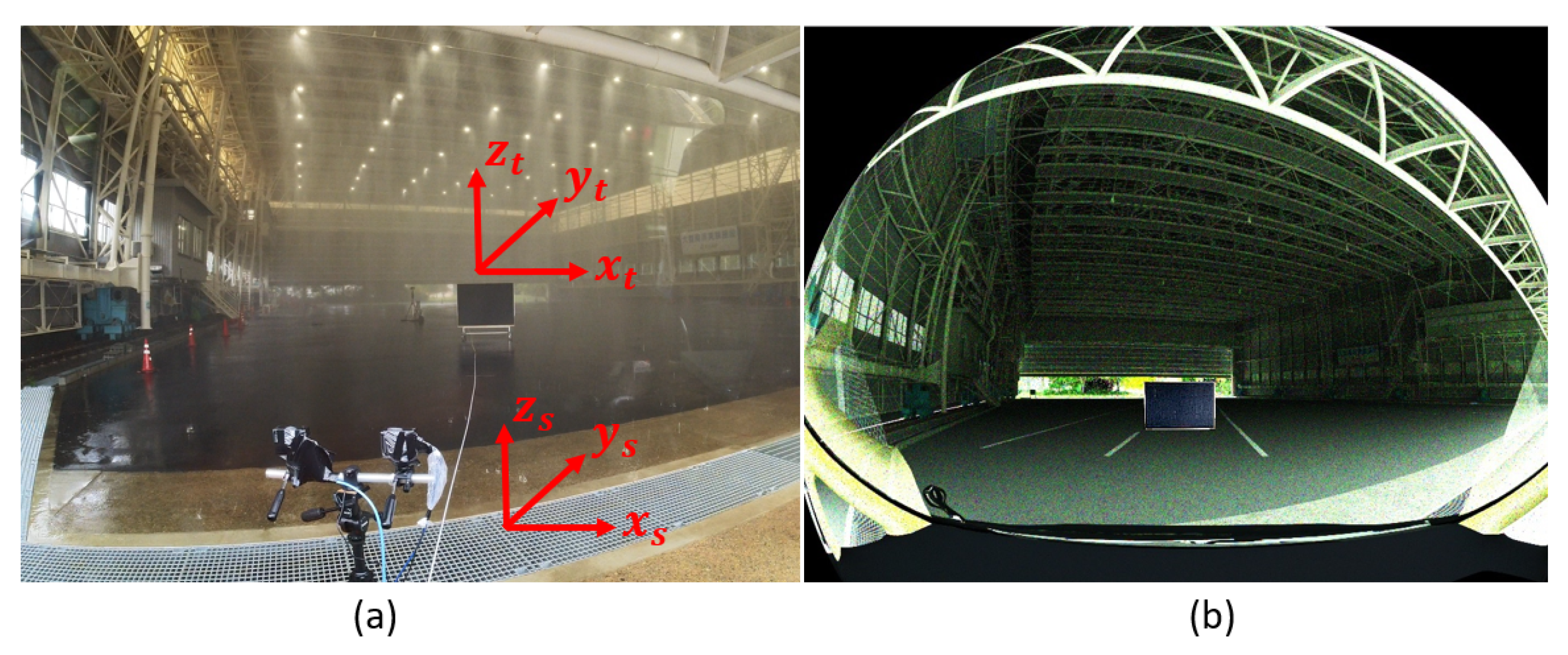
- The distance error of the point cloud received from OOI in rainy and dry conditions, both simulated and real, can be written as:where the ground truth distance is denoted by and is the mean distance of reflections received from the surface of the simulated and the real OOI in rainy and dry conditions. The ground truth distance is calculated from the sensor’s origin to the target’s center, and it can be written as:where the target’s x, y, and z coordinates are denoted by subscript t and the sensors by s [46]. The OSI ground truth interface osi3::GroundTruth is used to retrieve the sensor origin and target center position in 3D coordinates.
5.3. Validation of the Fog Effect Modeling on the Time Domain Level
5.4. Validation of the Fog Effect Modeling on the Point Cloud Level
6. Conclusions
7. Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADAS | Advanced driver-assistance system |
| BRDF | Bidirectional reflectance distribution function |
| CIE | International Commission on Illumination |
| DFT | Discrete Fourier transform |
| DR | Detection rate |
| DSD | Drop size distribution |
| FDR | False detection rate |
| FMU | Functional mock-up unit |
| FMI | Functional mock-up interface |
| FoV | Field of view |
| IDFT | Inverse discrete Fourier transform |
| KPIs | Key performance indicators |
| MAPE | Mean absolute percentage error |
| MPE | Maximum permissible error |
| NIED | National Research Institute for Earth Science and Disaster Prevention |
| OSI | Open simulation interface |
| OOI | Object of interest |
| RADAR | Radio detection and ranging |
| RTDT | Round-trip delay time |
| SNR | Signal-to-noise ratio |
| TDS | Time domain signals |
References
- Bilik, I. Comparative Analysis of Radar and Lidar Technologies for Automotive Applications. IEEE Intell. Transp. Sys. Mag. 2022, 15, 244–269. [Google Scholar] [CrossRef]
- Yole Intelligence, with the Strong Push of Chinese Players Eager to Integrate Innovative LiDAR Technologies, the Automotive Industry will Reach $2.0B in 2027, August 2022. Available online: https://www.yolegroup.com/product/report/lidar—market–technology-trends-2022/ (accessed on 10 February 2023).
- Kalra, N.; Paddock, S.M. Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? Transp. Res. Part A Policy Pract. 2016, 94, 182–193. [Google Scholar] [CrossRef]
- Haider, A.; Pigniczki, M.; Köhler, M.H.; Fink, M.; Schardt, M.; Cichy, Y.; Zeh, T.; Haas, L.; Poguntke, T.; Jakobi, M.; et al. Development of High-Fidelity Automotive LiDAR Sensor Model with Standardized Interfaces. Sensors 2022, 22, 7556. [Google Scholar] [CrossRef] [PubMed]
- NIED. Center for Advanced Research Facility: Evaluating the Latest Science and Technology for Disaster Resilience, to Make Society’S Standards for Performance. Available online: https://www.bosai.go.jp/e/research/center/shisetsu.html (accessed on 15 February 2023).
- CARISSMA, Center of Automotive Research on Integrated Safety Systems and Measurement Area. Available online: https://www.thi.de/en/research/carissma/ (accessed on 15 February 2023).
- Goodin, C.; Carruth, D.; Doude, M.; Hudson, C. Predicting the Influence of Rain on LIDAR in ADAS. Electronics 2019, 8, 89. [Google Scholar] [CrossRef] [Green Version]
- Wojtanowski, J.; Zygmunt, M.; Kaszczuk, M.; Mierczyk, Z.; Muzal, M. Comparison of 905 nm and 1550 nm semiconductor laser rangefinders’ performance deterioration due to adverse environmental conditions. Opto-Electron. Rev. 2014, 22, 183–190. [Google Scholar] [CrossRef]
- Rasshofer, R.H.; Spies, M.; Spies, H. Influences of weather phenomena on automotive laser radar systems. Adv. Radio Sci. 2011, 9, 49–60. [Google Scholar] [CrossRef] [Green Version]
- Byeon, M.; Yoon, S.W. Analysis of Automotive Lidar Sensor Model Considering Scattering Effects in Regional Rain Environments. IEEE Access 2020, 8, 102669–102679. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Deng, W.; Li, X.; Jiang, L. LiDAR Sensor Modeling for ADAS Applications under a Virtual Driving Environment; SAE Technical Paper 2016-01-1907; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Zhao, J.; Li, Y.; Zhu, B.; Deng, W.; Sun, B. Method and Applications of Lidar Modeling for Virtual Testing of Intelligent Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2990–3000. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, H.; Zhang, X.-J. Propagating Characteristics of Pulsed Laser in Rain. Int. J. Antennas Propag. 2015, 2015, 292905. [Google Scholar] [CrossRef] [Green Version]
- Hasirlioglu, S.; Riener, A. A Model-Based Approach to Simulate Rain Effects on Automotive Surround Sensor Data. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2609–2615. [Google Scholar]
- Hasirlioglu, S.; Riener, A. A General Approach for Simulating Rain Effects on Sensor Data in Real and Virtual Environments. IEEE Trans. Intell. Veh. 2020, 5, 426–438. [Google Scholar] [CrossRef]
- Berk, M.; Dura, M.; Rivero, J.V.; Schubert, O.; Kroll, H.M.; Buschardt, B.; Straub, D. A stochastic physical simulation framework to quantify the effect of rainfall on automotive lidar. SAE Int. J. Adv. Curr. Pract. Mobil. 2019, 1, 531–538. [Google Scholar] [CrossRef]
- Espineira, J.P.; Robinson, J.; Groenewald, J.; Chan, P.H.; Donzella, V. Realistic LiDAR with noise model for real-time testing of automated vehicles in a virtual environment. IEEE Sens. J. 2021, 21, 9919–9926. [Google Scholar] [CrossRef]
- Kilic, V.; Hegde, D.; Sindagi, V.; Cooper, A.B.; Foster, M.A.; Patel, V.M. Lidar Light Scattering Augmentation (LISA): Physics-based Simulation of Adverse Weather Conditions for 3D Object Detection. arXiv 2021, arXiv:2107.07004. [Google Scholar]
- Hahner, M.; Sakaridis, C.; Dai, D.; Van Gool, L. Fog simulation on real LiDAR point clouds for 3D object detection in adverse weather. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Online, 11–17 October 2021; pp. 15283–15292. [Google Scholar]
- IPG CarMaker. Reference Manual Version 9.0.1; IPG Automotive GmbH: Karlsruhe, Germany, 2021. [Google Scholar]
- Blickfeld Scan Pattern. Available online: https://docs.blickfeld.com/cube/latest/scan_pattern.html (accessed on 10 January 2023).
- Matsumoto, M.; Nishimura, T. Mersenne twister: A 623-dimensionally equidistributed uniform pseudo-random number generator. ACM Trans. Model. Comput. Simul. 1998, 8, 3–30. [Google Scholar] [CrossRef] [Green Version]
- Steele, J.M. Non-Uniform Random Variate Generation (Luc Devroye). SIAM Rev. 1987, 29, 675–676. [Google Scholar] [CrossRef]
- Marshall, J.S. The distribution of raindrops with size. J. Meteor. 1948, 5, 165–166. [Google Scholar] [CrossRef]
- Martinez-Villalobos, C.; Neelin, J.D. Why Do Precipitation Intensities Tend to Follow Gamma Distributions? J. Atmos. Sci. 2019, 76, 3611–3631. [Google Scholar] [CrossRef]
- Feingold, G.; Levin, Z. The Lognormal Fit to Raindrop Spectra from Frontal Convective Clouds in Israel. J. Appl. Meteorol. Climatol. 1986, 25, 1346–1363. [Google Scholar] [CrossRef]
- Atlas, D.; Ulbrich, C.W. Path- and Area-Integrated Rainfall Measurement by Microwave Attenuation in the 1–3 cm Band. J. Appl. Meteorol. Climatol. 1977, 16, 1322–1331. [Google Scholar] [CrossRef]
- Van Boxel, J.H. Numerical Model for the Fall Speed of Rain Drops in a Rain Fall Simulator. In Workshop on Wind and Water Erosion; University of Amsterdam: Amsterdam, The Netherlands, 1997; pp. 77–85. [Google Scholar]
- Hasirlioglu, S.; Riener, A. Introduction to rain and fog attenuation on automotive surround sensors. In Proceedings of the IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 16–19. [Google Scholar]
- Liou, K.-N.; Hansen, J.E. Intensity and polarization for single scattering by polydisperse spheres: A comparison of ray optics and Mie theory. J. Atmos. Sci. 1971, 28, 995–1004. [Google Scholar] [CrossRef]
- Van de Hulst, H.C. Light Scattering by Small Particles; Courier Corporation: North Chelmsford, MA, USA, 1981. [Google Scholar]
- Bohren, C.F.; Huffman, D.R. Absorption and Scattering of Light by Small Particles, 1st ed.; John Wiley and Sons, Inc.: New York, NY, USA, 1983. [Google Scholar]
- Du, H. Mie-scattering calculation. Appl. Opt. 2004, 43, 1951–1956. [Google Scholar] [CrossRef] [PubMed]
- Kruse, P.W.; McGlauchlin, L.D.; McQuistan, R.B. Elements of Infrared Technology: Generation, Transmission and Detection; John Wiley and Sons, Inc.: New York, NY, USA, 1962. [Google Scholar]
- Kim, I.I.; McArthur, B.; Korevaar, E.J. Comparison of laser beam propagation at 785 nm and 1550 nm in fog and haze for optical wireless communications. In Proceedings of the Optical Wireless Communications III, Boston, MA, USA, 5–8 November 2001; Volume 4214, pp. 26–38. [Google Scholar]
- Vasseur, H.; Gibbins, C.J. Inference of fog characteristics from attenuation measurements at millimeter and optical wavelength. Radio Sci. 1996, 31, 1089–1097. [Google Scholar] [CrossRef]
- Deirmendjian, D. Electromagnetic Scattering on Spherical Polydispersions; Rand Corp: Santa Monica, CA, USA, 1969; p. 456. [Google Scholar]
- Hasirlioglu, S. A Novel Method for Simulation-Based Testing and Validation of Automotive Surround Sensors under Adverse Weather Conditions. Ph.D. Thesis, Universität Linz, Linz, Austria, 2020. [Google Scholar]
- Fink, M.; Schardt, M.; Baier, V.; Wang, K.; Jakobi, M.; Koch, A.W. Full-Waveform Modeling for Time-of-Flight Measurements based on Arrival Time of Photons. arXiv 2022, arXiv:2208.03426. [Google Scholar]
- French, A.; Taylor, E. An Introduction to Quantum Physics; Norton: New York, NY, USA, 1978. [Google Scholar]
- Fox, A.M. Quantum Optics: An Introduction; Oxford Master Series in Physics Atomic, Optical, and Laser Physics; Oxford University Press: New York, NY, USA, 2007; ISBN 978-0-19-856673-1. [Google Scholar]
- Pasquinelli, K.; Lussana, R.; Tisa, S.; Villa, F.; Zappa, F. Single-Photon Detectors Modeling and Selection Criteria for High-Background LiDAR. IEEE Sens. J. 2020, 20, 7021–7032. [Google Scholar] [CrossRef]
- Bretz, T.; Hebbeker, T.; Kemp, J. Extending the dynamic range of SiPMs by understanding their non-linear behavior. arXiv 2010, arXiv:2010.14886. [Google Scholar]
- Schröder, D.J. Astronomical Optics, 2nd ed.; Academic Press: San Diego, CA, USA, 2000. [Google Scholar]
- Swamidass, P.M. Mean Absolute Percentage Error (MAPE). In Encyclopedia of Production and Manufacturing Management; Springer: Boston, MA, USA, 2000. [Google Scholar]
- Lang, S.; Murrow, G. The Distance Formula. In Geometry; Springer: New York, NY, USA, 1988; pp. 110–122. [Google Scholar]
- Mazoyer, M.; Burnet, F.; Denjean, C. Experimental study on the evolution of droplet size distribution during the fog life cycle. Atmos. Chem. Phys. 2022, 22, 11305–11321. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, C.; Niu, S.; Lv, J.; Jia, X.; Xu, X.; Xue, Y.; Zhu, L.; Yan, S. Diverse Dispersion Effects and Parameterization of Relative Dispersion in Urban Fog in Eastern China. J. Geophys. Res. Atmos. 2023, 128, e2022JD037514. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Covered Weather Phenomena | Covered Effects | Validation Approach |
|---|---|---|---|
| Goodin et al. [7] | Rain | Signal attenuation, false negative, ranging error , decrease in maximum detection range | Simulation results |
| Wojtanowski et al. [8] | Rain, fog, aerosols | Signal attenuation, target reflectivity, range degradation | Simulation results |
| Rasshofer et al. [9] | Rain, fog, snow | Signal attenuation, range degradation | Simulation results, qualitative comparison with real measurements for fog attenuation |
| Byeon et al. [10] | Rain | Signal attenuation | Simulation results |
| Li et al. [11] | Rain, fog, snow, haze | Signal attenuation | Simulation results |
| Zhao et al. [12] | Rain, fog, snow, haze | Signal attenuation, false positive | Quantitative comparison with measurements for rain |
| Guo et al. [13] | Rain | Signal attenuation | Qualitative comparison with measurements |
| Hasirlioglu et al. [14,15] | Rain | Signal attenuation, false positive | Quantitative comparison with measurements |
| Berk et al. [16] | Rain | Signal attenuation, false positive | Simulation results |
| Espineira et al. [17] | Rain | Signal attenuation, false positive | Simulation results |
| Kilic et al. [18] | Rain, fog, snow | Signal attenuation, false positive | Quantitative comparison with measurements |
| Hahner et al. [19] | Fog | Signal attenuation, false positive | Quantitative comparison with measurements |
| Haider et al. (proposed approach) | Rain, fog | Signal attenuation, SNR, false positive, false negative, ranging error | Qualitative comparison with measurements for all covered effects |
| Weather Condition | () | |||
|---|---|---|---|---|
| Haze (coast) | 100 | 1 | 0.5 | 0.1 |
| Haze (continental) | 100 | 2 | 0.5 | 0.14 |
| Strong advection fog | 20 | 3 | 1.0 | 20.0 |
| Moderate advection fog | 20 | 3 | 1.0 | 16.0 |
| Strong spray | 100 | 6 | 1.0 | 8.00 |
| Moderate spray | 100 | 6 | 1.0 | 4.00 |
| Fog of type “Chu/Hogg” | 20 | 2 | 0.5 | 2.00 |
| (mm/h) | Target Distance R | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 m | 10 m | 15 m | 20 m | |||||||||
(%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | |
| 0 | 100.0 | 100.0 | 0.0 | 100.0 | 100.0 | 0.0 | 100.0 | 100.0 | 0.0 | 100.0 | 100.0 | 0.0 |
| 16 | 100.0 | 100.0 | 0.0 | 100.0 | 100.0 | 0.0 | 89.3 | 96.7 | 7.4 | 88.1 | 93.9 | 5.8 |
| 32 | 100.0 | 100.0 | 0.0 | 100.0 | 100.0 | 0.0 | 87.5 | 93.2 | 5.7 | 85.3 | 88.4 | 3.1 |
| 66 | 100.0 | 100.0 | 0.0 | 99.8 | 100.0 | 0.2 | 86.2 | 91.6 | 5.4 | 84.4 | 89.2 | 4.8 |
| 98 | 100.0 | 100.0 | 0.0 | 96.5 | 100.0 | 3.5 | 85.2 | 88.2 | 3.0 | 82.3 | 85.9 | 3.6 |
| (mm/h) | Target Distance R | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 m | 10 m | 15 m | 20 m | |||||||||
(%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | (%) | |
| 0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 16 | 0.8 | 0.3 | 0.5 | 1.8 | 1.4 | 0.4 | 3.2 | 2.9 | 0.3 | 5.5 | 4.1 | 1.4 |
| 32 | 1.6 | 1.0 | 1.6 | 4.8 | 3.1 | 1.7 | 7.1 | 5.8 | 1.4 | 7.3 | 7.6 | 0.3 |
| 66 | 1.7 | 1.2 | 0.5 | 7.0 | 5.7 | 1.3 | 18.9 | 14.6 | 4.3 | 19.6 | 18.2 | 1.4 |
| 98 | 2.4 | 1.9 | 0.5 | 9.1 | 6.9 | 2.2 | 20.4 | 17.2 | 3.2 | 22.7 | 20.2 | 2.5 |
| (mm/h) | Target Distance R | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 m | 10 m | 15 m | 20 m | |||||||||
(cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | |
| 0 | 0.2 | 0.1 | 0.1 | 0.5 | 0.1 | 0.4 | 0.7 | 0.2 | 0.5 | 1.4 | 0.2 | 1.2 |
| 16 | 1.1 | 0.9 | 0.2 | 1.3 | 1.1 | 0.2 | 1.7 | 1.4 | 0.3 | 2.3 | 1.5 | 0.8 |
| 32 | 1.2 | 1.0 | 0.2 | 1.8 | 1.2 | 0.6 | 2.9 | 2.0 | 0.9 | 3.3 | 2.2 | 1.1 |
| 66 | 1.4 | 1.1 | 0.3 | 2.6 | 1.9 | 0.7 | 3.0 | 2.2 | 0.8 | 4.8 | 2.4 | 2.4 |
| 98 | 1.6 | 1.2 | 0.4 | 2.9 | 1.6 | 1.3 | 3.1 | 2.3 | 0.9 | 4.9 | 2.8 | 2.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haider, A.; Pigniczki, M.; Koyama, S.; Köhler, M.H.; Haas, L.; Fink, M.; Schardt, M.; Nagase, K.; Zeh, T.; Eryildirim, A.; et al. A Methodology to Model the Rain and Fog Effect on the Performance of Automotive LiDAR Sensors. Sensors 2023, 23, 6891. https://doi.org/10.3390/s23156891
Haider A, Pigniczki M, Koyama S, Köhler MH, Haas L, Fink M, Schardt M, Nagase K, Zeh T, Eryildirim A, et al. A Methodology to Model the Rain and Fog Effect on the Performance of Automotive LiDAR Sensors. Sensors. 2023; 23(15):6891. https://doi.org/10.3390/s23156891
Chicago/Turabian StyleHaider, Arsalan, Marcell Pigniczki, Shotaro Koyama, Michael H. Köhler, Lukas Haas, Maximilian Fink, Michael Schardt, Koji Nagase, Thomas Zeh, Abdulkadir Eryildirim, and et al. 2023. "A Methodology to Model the Rain and Fog Effect on the Performance of Automotive LiDAR Sensors" Sensors 23, no. 15: 6891. https://doi.org/10.3390/s23156891