



Application of Social Robots in Healthcare: Review on Characteristics, Requirements, Technical Solutions

Abstract
:1. Introduction
- It stands out as a broad and comprehensive review, both from the temporal and sectorial points of views (i.e., years, scientific field, patents field, and global market);
- The healthcare environment is very wide and diverse; thus, specific applications, stakeholders, and diseases in which SRs are involved are presented;
- Technical devices and requirements of SRs are discussed in detail;
- Guidelines for a multidisciplinary team of researchers involved in social robotics field are reported. This leads to the development of a cyber solution capable of establishing effective human–robot interactions.
Organization
- Scientific literature research and an accurate analysis of the Scopus database (Elsevier @) are reported. In this first part, the method used to obtain data is presented, and according to different parameters information is elaborated upon, mapped, and filtered to present results in the Discussion (Paragraph 5).
- Patent research (in this case, the database involved is the Espacenet database) and information on analytical methods used and data treatments are presented. In this second part, a classification based on the international patent classification (IPC) has highlighted important patents reported and analyzed in the Discussion.
- Market research has been executed through Google search engine (Google LLC, Mountain View, CA, USA), and several pieces of information have been reported about market goals, limitations, and global dimension. Also in this case, the obtained results have been properly discussed in Paragraph 5.
2. Scientific Literature Research
2.1. Materials and Methods
2.1.1. Data Selection Procedure
2.1.2. Subset Pre-Filtering
2.1.3. Data Treatment
Bibliometric Analysis
Taxonomy
Analytical Review
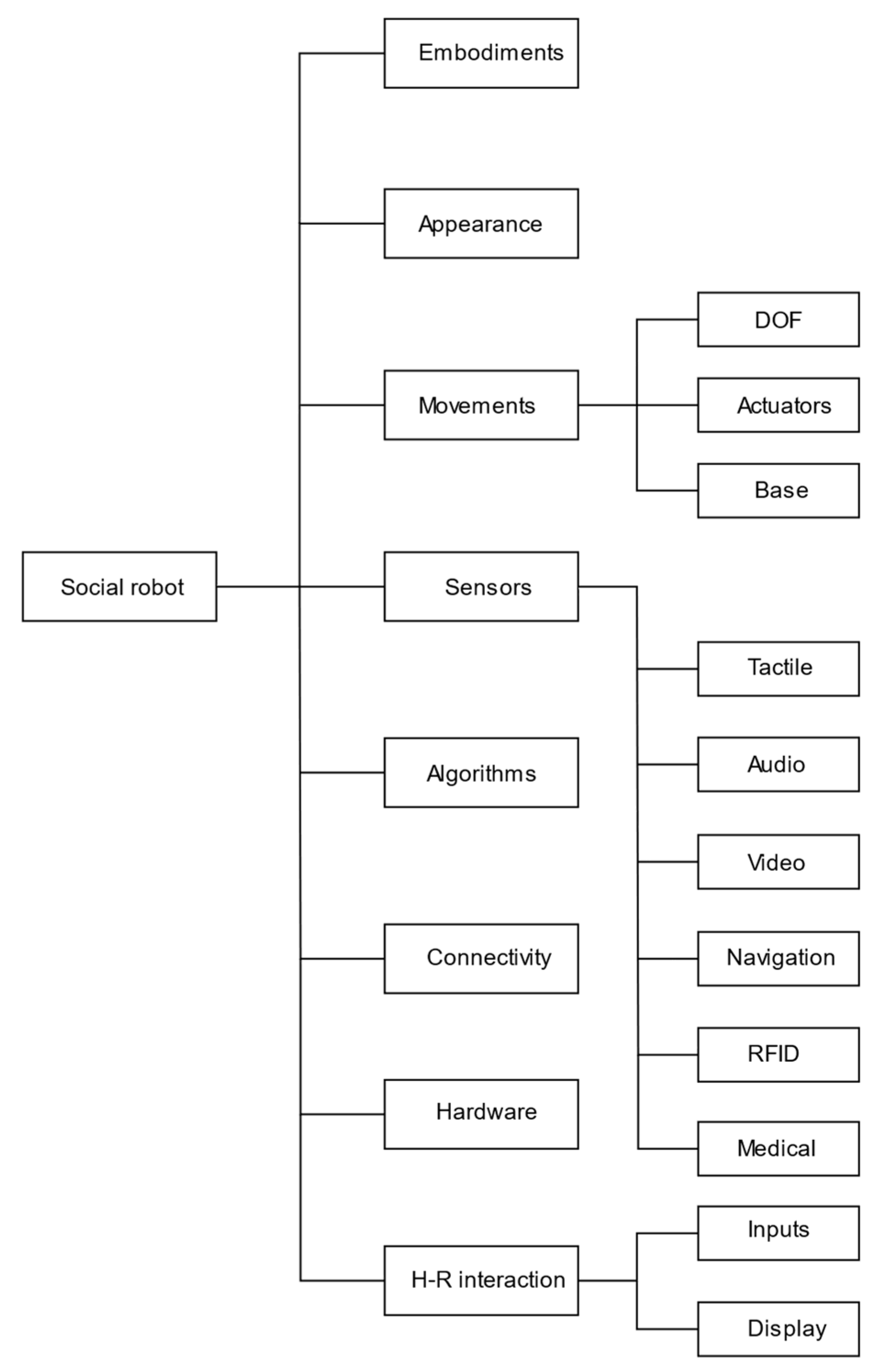
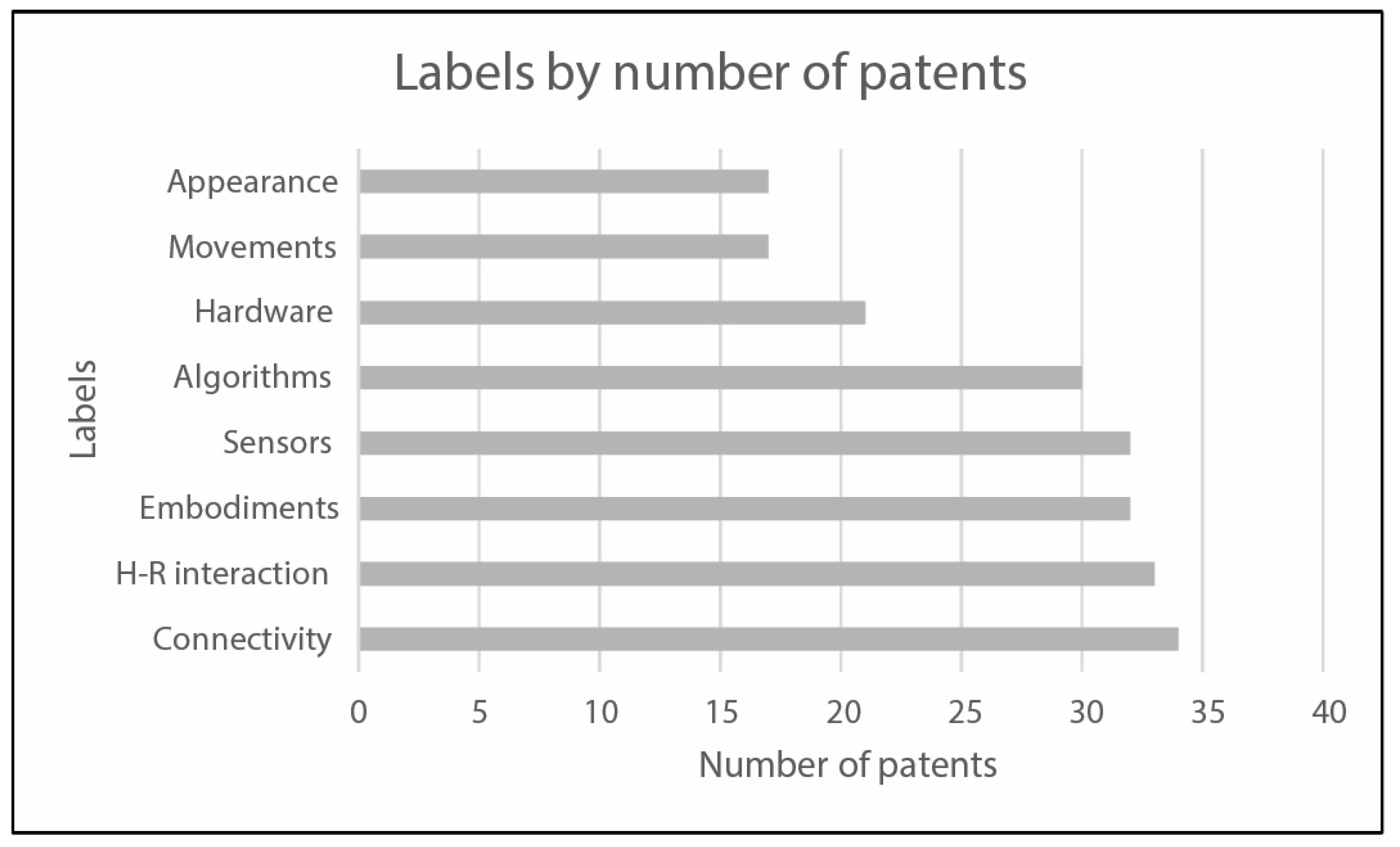
- Embodiments: This category focuses on describing the main structure of the robots related to their specific functions and field of application;
- Appearance: This category considers the appearance of social robots applied in the healthcare area, discussing on materials, shapes, and innovative techniques used to produce some aesthetic parts of the robots;
- Movements: In this category, the motion capability of robots has been analyzed, concerning the degrees of freedom and actuators used to generate movements;
- Sensors: In this category, the sensory equipment of social robots has been described. It has been classified with respect to the measured target magnitude and main aim of each type of device;
- Algorithms: This category gathers algorithms used to define the system interactions between environment and social partners;
- Hardware and Connectivity: This category describes the involved communication protocols and the adopted hardware and architecture;
- Human–robot interaction: This category describes methodologies and devices that allow to share information between social robots and human being and controlling systems used to direct robots’ assistance.
- Ethical, privacy, and security issues: This category describes aspects that lawmakers are focusing on most, because of several potentially controversial implications.
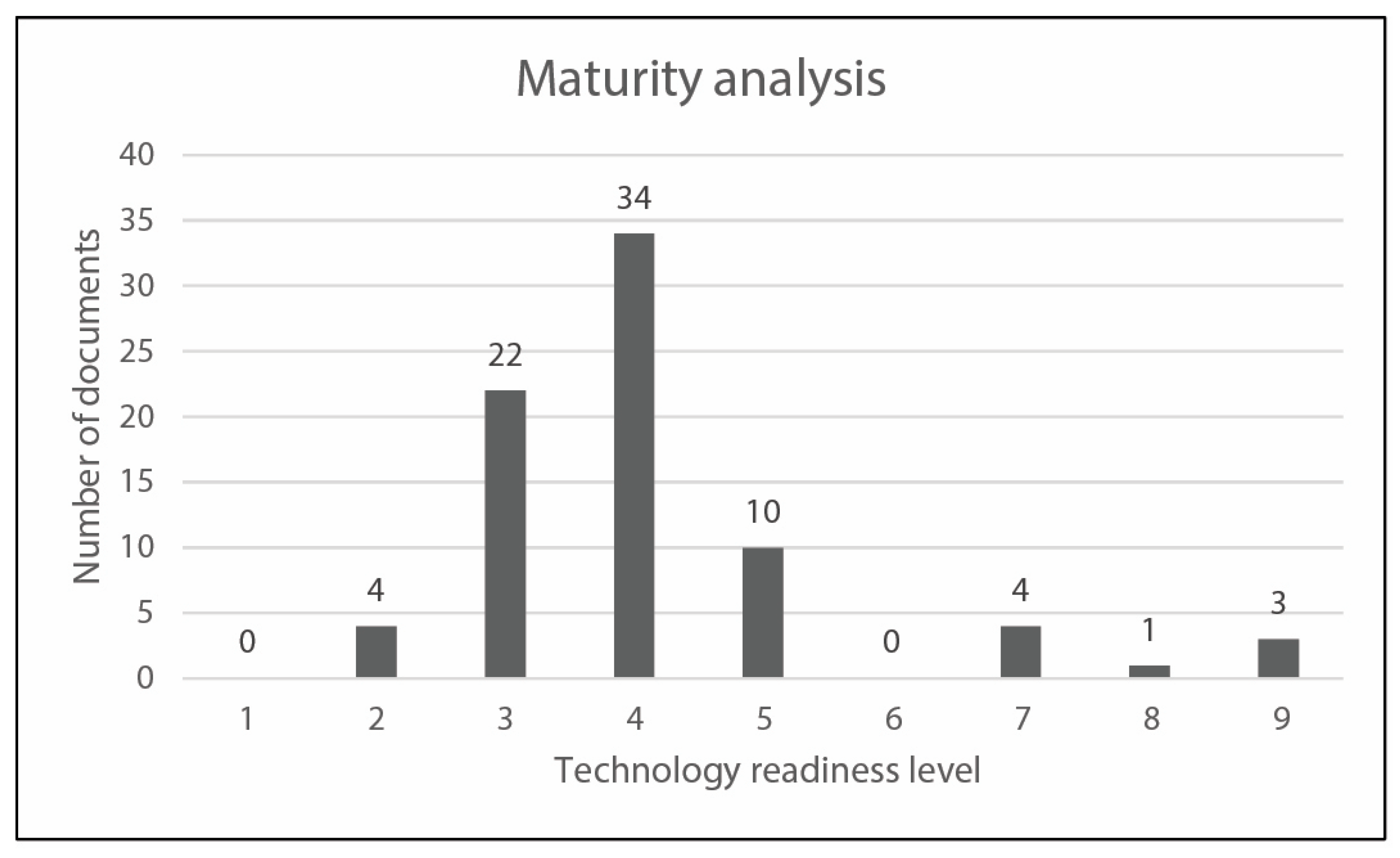
Maturity Review
2.2. Results
2.2.1. Results for Subset Sub-Filtering Process
- Marked by value “2”, 96 documents have passed the validation process, and they have been subjected to deeper analyses (Analytical review and Maturity review);
- Marked by value “1”, 1021 documents have not passed the validation process, and a further review is required;
- Marked by value “0”, 2860 documents have not passed the validation process.
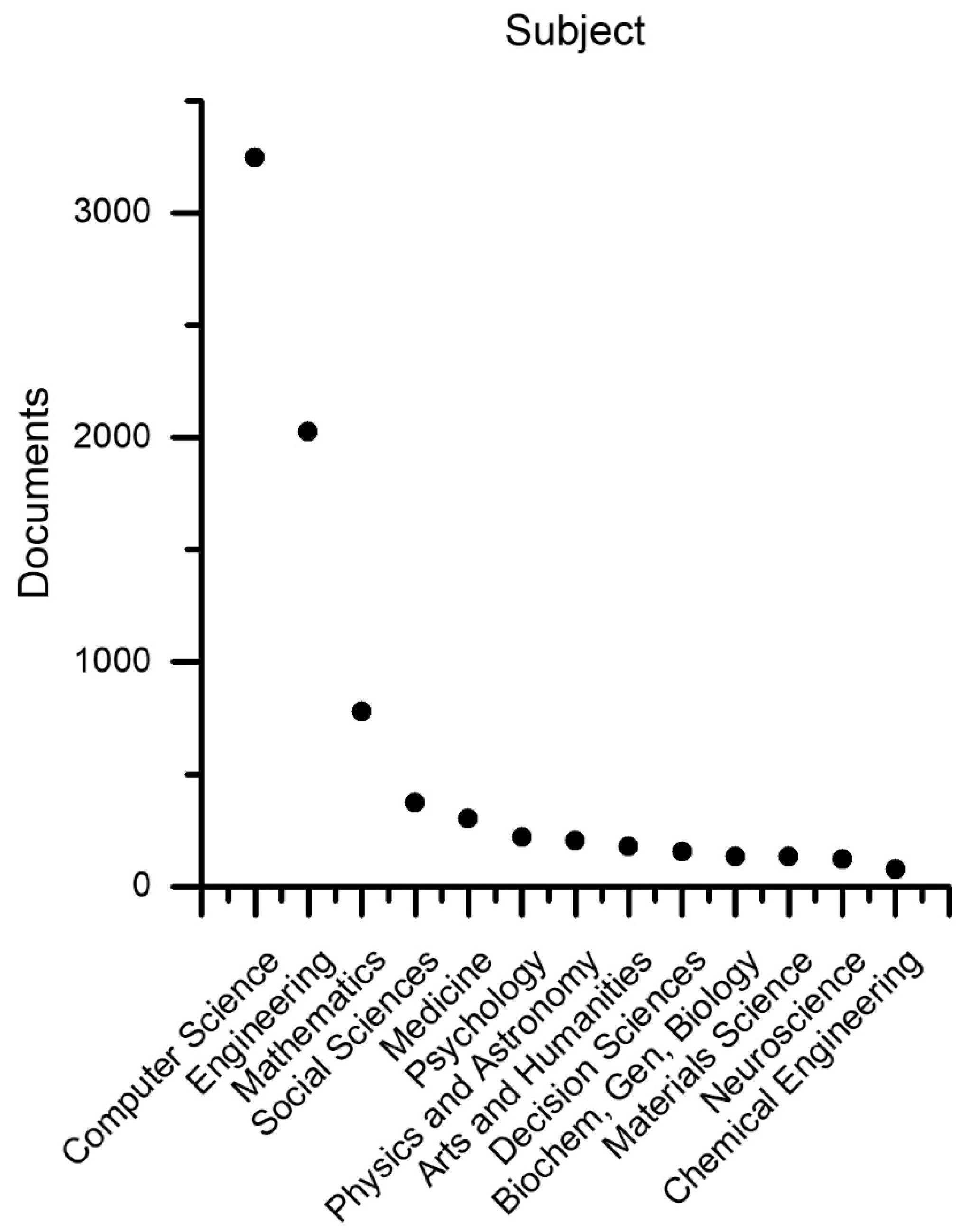
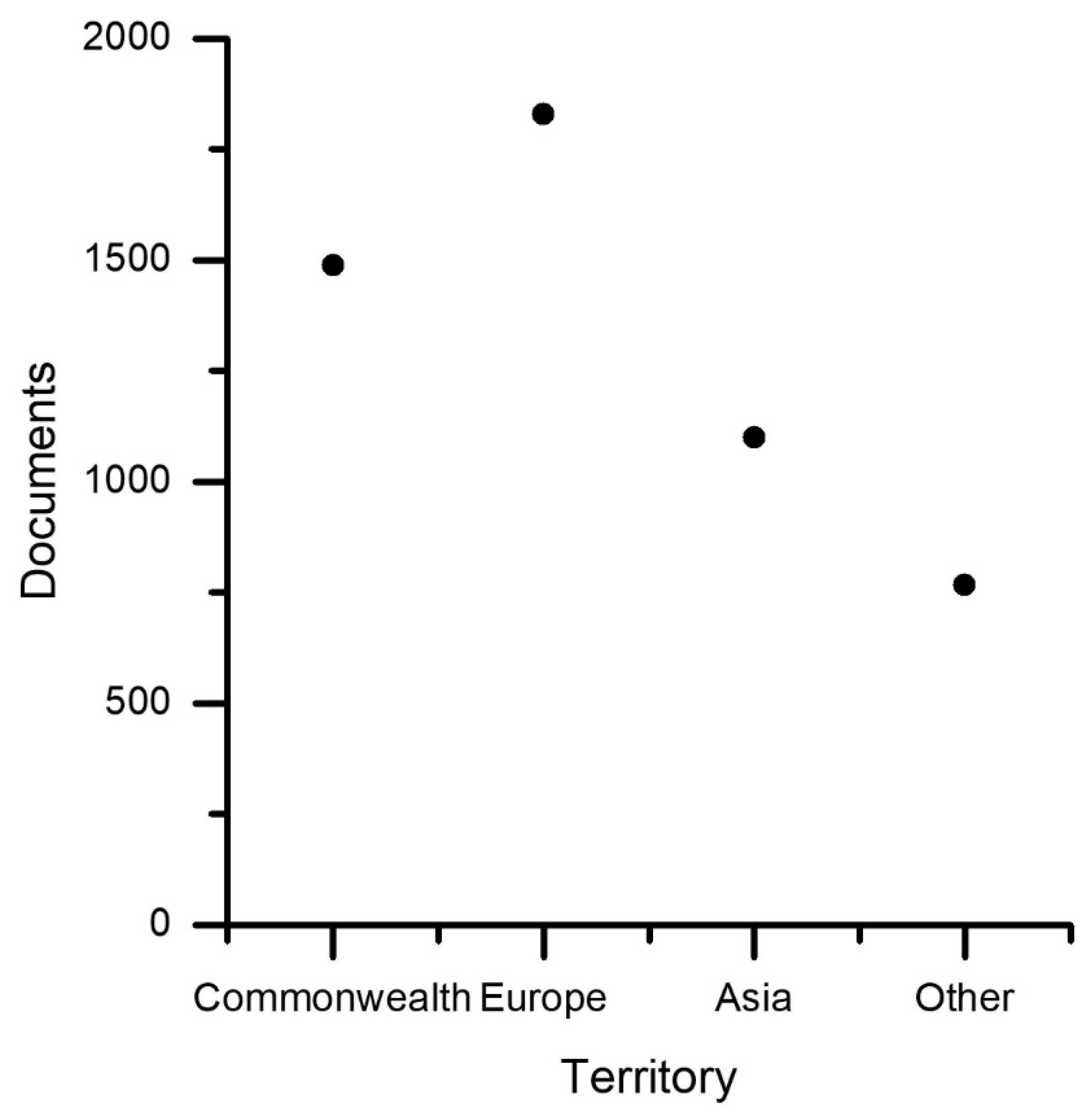
2.2.2. Bibliometric Results
2.2.3. Analytical Results
2.2.4. Maturity Results
3. Patents
3.1. Materials and Methods
- Marked “III” patents: These documents are related to robots involved in social and/or crowded environments for personal assistance, medical, and telepresence purposes.
- Marked “II” patents: These documents are related to non-specific embodiments and general technologies that are not yet implemented in social robotics field, or their aim is not expressly referred to medical purposes and/or robotic applications.
- Marked “I” patents: These documents include systems that are not related to social robots and their application in medical and assistance fields. For instance, patents focused on industrial devices or methods and products used to treat infections and diseases have been marked with “0 tag”.
3.2. Results
4. Market
4.1. Materials and Methods
4.2. Results
- (i)
- Food and medication distribution (e.g., Sona-2.5, Zafi medic robot, and KARMI-Bot, CO-Bot) through a high degree of automatic handling (e.g., SLAM algorithm) and load-carrying capacity (above 15 kg);
- (ii)
- A high level of robot interaction capacity with users or patients. Touchscreens, displays, and cameras constitute essential devices to provide teleconference ability to the robots (based on Web real-time communication), while algorithms such as speech recognition, emotional state recognition (e.g., monitoring systems based on deep neural network), and SLAM localization allow robots to collect data on people and the environment [11].
5. Discussion
5.1. Embodiments
- Humanoid robots are systems characterized by human-like appearance. They can present a virtual or a physical face; the first is shown on a screen or by LED arrays where the mouth, eyes, and nose can be displayed; the second can be realized by three-dimensional printing or other processes and be coated by synthetic skin or left uncoated. Moreover, they can present legs and/or arms to improve their capability of interaction.
- Pet companion-bots are systems designed to replicate the shape of a companion animal such as cats, dogs, seals, etc. The most famous embodiments are AIBO and PARO. They are used for pet therapy, when using real animals could be difficult or impossible due to allergies or when the patient is not able to take care of the companion.
- Telepresence robots are a system coupled with wheels and a motor drive unit. They have a vertical structure which ends with a display or a touchscreen, capable of showing videocalls or a virtual human face to better interact with people.
- Large-sized robots are involved in healthcare environments to deliver drugs in various hospital wards (i.e., Relay [75], Tug T3 [76], Moxi [77], and CSJBOT [78]) or as a receptionist (i.e., CSJBOT robots [79,80,81] and ROBOVIE R3 [82]). This type of social robots also includes more realistic human-like devices involved in university research such as Sophia [83].
5.2. Appearance
5.2.1. Description of the Uncanny Valley Phenomenon
5.2.2. Design Guidelines
5.3. Degrees of Freedom
- Highly actuated robots (HAR), that are cyber-physical systems in which several actuators and sensors (e.g., encoders) associated with the respective movable joints allow realistic movements. In this way, robots (humanoid or pet companion bots) are capable of better reproducing the motional behavior of the natural counterparts. For instance, NAO and PEPPER robots (Softbank Robotics) can be grouped in this section;
- Slightly actuated robots (SAR), that are cyber-physical systems in which some actuators, located on the robot in specific relevant points, allow carrying out significative and elementary movements, such as gaze-following or other human-like behaviors. For instance, JIBO [90] and VITA (InTouch Health) can be grouped in this section.
5.4. Sensors
5.4.1. Tactile Sensors
5.4.2. Audio Sensors
5.4.3. Videos Sensors
5.4.4. Navigation Sensors
5.4.5. RFID Devices
5.4.6. Sensors for Medical Purposes
5.5. Algorithms
5.5.1. Data Elaboration
5.5.2. Artificial Intelligence
5.6. Connectivity and Hardware
5.7. Human–Robot Interaction
5.7.1. Input Control Device
5.7.2. Display and Touchscreen
5.8. Impact of Ethics, Security, and Privacy on the Design of Social Robots
5.8.1. Ethics in Social Robotics
5.8.2. Privacy and Security
5.9. Guidelines for Social Robot Design in Healthcare Applications
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Søraa, R.A.; Tøndel, G.; Kharas, M.W.; Serrano, J.A. What do Older Adults Want from Social Robots? A Qualitative Research Approach to Human-Robot Interaction (HRI) Studies. Int. J. Soc. Robot. 2023, 15, 411–424. [Google Scholar] [CrossRef]
- Ferrari, O.I.; Van Gurp, J.A.M.; Zhang, F.; Broz, F.; Braam, A.A.; Barakova, E.I. Design of Child-robot Interactions for Comfort and Distraction from Post-operative Pain and Distress. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Stockholm, Sweden, 13–16 March 2023; pp. 686–690. [Google Scholar]
- Foster, M.E.; Candelaria, P.; Hudson, S.; Lindsay, A.; Pacquing, M.; Petrick, R.P.A.; Stinson, J.; Zeller, F.; Dwyer, L.J.; Nishat, F.; et al. Co-design of a Social Robot for Distraction in the Paediatric Emergency Department. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Stockholm, Sweden, 13–16 March 2023; pp. 461–465. [Google Scholar]
- Dosso, J.A.; Kailley, J.N.; Guerra, G.K.; Robillard, J.M. Older adult perspectives on emotion and stigma in social robots. Front. Psychiatry 2023, 13, 1051750. [Google Scholar] [CrossRef]
- Hegel, F.; Muhl, C.; Wrede, B.; Hielscher-Fastabend, M.; Sagerer, G. Understanding Social Robots. In Proceedings of the Second International Conferences on Advances in Computer-Human Interactions, Cancun, Mexico, 1–7 February 2009; pp. 169–174. [Google Scholar]
- Oliveira, O.; da Silva, F.; Juliani, F.; Ferreira, L.; Nunhes, T. Bibliometric Method for Mapping the State-of-the-Art and Identifying Research Gaps and Trends in Literature: An Essential Instrument to Support the Development of Scientific Projects. In Scientometrics Recent Advances; IntechOpen: London, UK, 2019. [Google Scholar]
- De Rose, A.; Buna, M.; Strazza, C.; Olivieri, N.; Stevens, T.; Peeters, L.; Tawil-Jamault, D. Technology Readiness Level: Guidance Principles for Renewable Energy Technologies: Final Report; European Commission: Petten, The Netherlands, 2017. [Google Scholar]
- Insights on the Social Robots Global Market to 2026—Rise in Automation is Driving Growth; Research and Markets: Dublin, Ireland, 2021.
- PARO. Available online: http://www.parorobots.com/ (accessed on 21 August 2022).
- AIBO. Available online: https://us.aibo.com/ (accessed on 21 August 2022).
- Khadidos, A. A Comprehensive Study on Robots in Health and Social Care. Lect. Notes Netw. Syst. 2023, 490, 515–525. [Google Scholar] [CrossRef]
- Aymerich-Franch, L.; Ferrer, I. Socially Assistive Robots’ Deployment in Healthcare Settings: A Global Perspective. Int. J. Humanoid Robot. 2023, 20, 2350002. [Google Scholar] [CrossRef]
- Martínez, A.; Belmonte, L.M.; García, A.S.; Fernández-Caballero, A.; Morales, R. Facial emotion recognition from an unmanned flying social robot for home care of dependent people. Electronics 2021, 10, 868. [Google Scholar] [CrossRef]
- Djugash, J.M. Computer-Based Method and System of Providing Active and Automatic Personal Assistance Using Robotic Device/Platform. U.S. Patent 9,223,837, 14 March 2013. [Google Scholar]
- Tan, H.; Baloch, G.A.; Zhao, Y.; Castillo-Effen, M. Controlling and Commanding an Unmanned Robot Using Natural Interfaces. U.S. Patent 20190224849A1, 23 January 2018. [Google Scholar]
- Braun, J.F.; Diez-Valencia, G.; Ehrlich, S.K.; Lanillos, P.; Cheng, G. A prototype of a P300 based brain-robot interface to enable multi-modal interaction for patients with limited mobility. In Proceedings of the IEEE International Conference on Cyborg and Bionic Systems (CBS), Munich, Germany, 18–20 September 2019; pp. 78–84. [Google Scholar]
- Kumar, P.B.; Parhi, D.R.; Sahu, C. An approach to optimize the path of humanoid robots using a hybridized regression-adaptive particle swarm optimization-adaptive ant colony optimization method. Ind. Robot. 2019, 46, 104–117. [Google Scholar] [CrossRef]
- Johnson, M.J.; Sobrepera, M.J.; Kina, E.; Mendonca, R. Design of an affordable socially assistive robot for remote health and function monitoring and prognostication. Int. J. Progn. Health Manag. 2019, 10, 1–15. [Google Scholar] [CrossRef]
- Ahn, H.S.; Yep, W.; Lim, J.; Ahn, B.K.; Johanson, D.L.; Hwang, E.J.; Lee, M.H.; Broadbent, E.; Macdonald, B.A. Hospital Receptionist Robot v2: Design for Enhancing Verbal Interaction with Social Skills. In Proceedings of the 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019. [Google Scholar]
- NAO. Available online: https://www.softbankrobotics.com/emea/en/nao (accessed on 21 August 2022).
- Gouraguine, S.; Riad, M.; Qbadou, M.; Mansouri, K. Dysgraphia detection based on convolutional neural networks and child-robot interaction. Int. J. Electr. Comput. Eng. 2023, 13, 2999–3009. [Google Scholar] [CrossRef]
- Mezzina, G.; De Venuto, D. Smart Sensors HW/SW Interface based on Brain-actuated Personal Care Robot for Ambient Assisted Living. In Proceedings of the IEEE SENSORS, Rotterdam, The Netherlands, 25–28 October 2020. [Google Scholar]
- Rodriguez-Moreno, I.; Martinez-Otzeta, J.M.; Goienetxea, I.; Rodriguez-Rodriguez, I.; Sierra, B. Shedding Light on People Action Recognition in Social Robotics by Means of Common Spatial Patterns. Sensors 2020, 20, 2436. [Google Scholar] [CrossRef] [Green Version]
- Richert, A.; Schiffmann, M.; Yuan, C. A Nursing Robot for Social Interactions and Health Assessment. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, San Diego, CA, USA, 16–20 July 2020. [Google Scholar]
- Cruz, E.; Escalona, F.; Bauer, Z.; Cazorla, M.; García-Rodríguez, J.; Martinez-Martin, E.; Rangel, J.C.; Gomez-Donoso, F. Geoffrey: An automated schedule system on a social robot for the intellectually challenged. Comput. Intell. Neurosci. 2018, 2018, 4350272. [Google Scholar] [CrossRef]
- Ghiță, A.Ș.; Gavril, A.F.; Nan, M.; Hoteit, B.; Awada, I.A.; Sorici, A.; Mocanu, I.G.; Florea, A.M. The amiro social robotics framework: Deployment and evaluation on the pepper robot. Sensors 2020, 20, 7271. [Google Scholar] [CrossRef]
- PEPPER. Available online: https://www.softbankrobotics.com/emea/en/pepper (accessed on 21 August 2022).
- Neef, C.; Linden, K.; Richert, A. Exploring the Influencing Factors on User Experience in Robot-Assisted Health Monitoring Systems Combining Subjective and Objective Health Data. Appl. Sci. 2023, 13, 3537. [Google Scholar] [CrossRef]
- Aslan, S.N.; Ucar, A.; Guzelis, C. Fast Object Recognition for Humanoid Robots by Using Deep Learning Models with Small Structure. In Proceedings of the International Conference on INnovations in Intelligent SysTems and Applications (INISTA), Novi Sad, Serbia, 24–26 August 2020. [Google Scholar]
- Cheng, H.; Ji, G. Design and implementation of a low cost 3D printed humanoid robotic platform. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Chengdu, China, 19–22 June 2016; pp. 86–91. [Google Scholar]
- Cruz-Sandoval, D.; Penaloza, C.I.; Favela, J.; Castro-Coronel, A.P. Towards social robots that support exercise therapies for persons with dementia. In Proceedings of the 2018 ACM International Joint Conference and 2018 International Symposium on Pervasive and Ubiquitous Computing and Wearable Computers, Singapore, 8–12 October 2018; pp. 1729–1734. [Google Scholar]
- Meghdari, A.; Shariati, A.; Alemi, M.; Nobaveh, A.A.; Khamooshi, M.; Mozaffari, B. Design Performance Characteristics of a Social Robot Companion “Arash” for Pediatric Hospitals. Int. J. Humanoid Robot. 2018, 15, 1–27. [Google Scholar] [CrossRef]
- Abiri, R.; Borhani, S.; Zhao, X.; Jiang, Y. Real-time brain machine interaction via social robot gesture control. In Proceedings of the ASME 2017 Dynamic Systems and Control Conference, Tysons, VA, USA, 11–13 October 2017. [Google Scholar]
- McColl, D.; Louie, W.Y.G.; Nejat, G. Brian 2.1: A Socially assistive robot for the elderly and cognitively impaired. IEEE Robot. Autom. Mag. 2013, 20, 74–83. [Google Scholar] [CrossRef]
- Breazeal, C. Toward sociable robots. Robot. Auton. Syst. 2003, 42, 167–175. [Google Scholar] [CrossRef]
- Mordoch, E.; Osterreicher, A.; Guse, L.; Roger, K.; Thompson, G. Use of social commitment robots in the care of elderly people with dementia: A literature review. Maturitas 2013, 74, 14–20. [Google Scholar] [CrossRef]
- NECORO. Available online: https://robotics.omron.com/ (accessed on 21 August 2022).
- Hung, L.; Liu, C.; Woldum, E.; Au-Yeung, A.; Berndt, A.; Wallsworth, C.; Horne, N.; Gregorio, M.; Mann, J.; Chaudhury, H. The benefits of and barriers to using a social robot PARO in care settings: A scoping review. BMC Geriatr. 2019, 19, 232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miklósi, Á.; Gácsi, M. On the Utilization of Social Animals as a Model for Social Robotics. Front. Psychol. 2012, 3, 75. [Google Scholar] [CrossRef] [Green Version]
- Stiehl, W.D.; Lieberman, J.; Breazeal, C.; Basel, L.; Lalla, L.; Wolf, M. Design of a therapeutic robotic companion for relational, affective touch. In Proceedings of the ROMAN 2005. IEEE International Workshop on Robot and Human Interactive Communication, Nashville, TN, USA, 13–15 August 2005; pp. 408–415. [Google Scholar]
- Bethel, C.L.; Henkel, Z.; Darrow, S.; Baugus, K. Therabot-an adaptive therapeutic support robot. Paladyn J. Behav. Robot. 2018, 12, 23–30. [Google Scholar]
- Passler Bates, D.; Young, J.E. SnuggleBot: A Novel Cuddly Companion Robot Design. In Proceedings of the 8th International Conference on Human-Agent Interaction, Online, 10–13 November 2020; pp. 260–262. [Google Scholar]
- Yohanan, S.; MacLean, K.E. A tool to study affective touch: Goals and design of the Haptic Creature. In Proceedings of the CHI ’09 Extended Abstracts on Human Factors in Computing Systems, Boston, MA, USA, 4–9 April 2009; pp. 4153–4158. [Google Scholar]
- HAPTIC CREATURE. Available online: http://yohanan.org/steve/projects/haptic-creature (accessed on 21 August 2022).
- Talami, F.; Romero, M.; Borga, G. Edù, a Robotic Companion in Pediatric Protective Isolation Units. In Proceedings of the Educational Robotics International Conference, Siena, Italy, 25–26 February 2021; Volume 982, pp. 103–107. [Google Scholar] [CrossRef]
- Ranjkar, E.; Rafatnejad, R.; Nobaveh, A.A.; Meghdari, A.; Alemi, M. Design, Fabrication, and Evaluation of the ‘Maya’ Social Robot. In Proceedings of the 7th International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 20–21 November 2019; pp. 52–62. [Google Scholar]
- Murwantara, I.M. An initial framework of dynamic software product line engineering for adaptive service robot. In Proceedings of the International Conference on Computer Science and Its Application in Agriculture (ICOSICA), Bogor, Indonesia, 16–17 September 2020. [Google Scholar]
- Ropero, F.; Vaquerizo-Hdez, D.; Muñoz, P.; Barrero, D.F.; R-Moreno, M.D. LARES: An AI-based teleassistance system for emergency home monitoring. Cogn. Syst. Res. 2019, 56, 213–222. [Google Scholar] [CrossRef]
- Thomsen, N.B.; Tan, Z.H.; Lindberg, B.; Jensen, S.H. A heuristic approach for a social robot to navigate to a person based on audio and range information. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5884–5890. [Google Scholar]
- Abe, K.; Shiomi, M.; Pei, Y.; Zhang, T.; Ikeda, N.; Nagai, T. ChiCaRo: Tele-presence robot for interacting with babies and toddlers. Adv. Robot. 2018, 32, 176–190. [Google Scholar] [CrossRef]
- Um, D.; Park, J.; Shin, J.; Lee, W.H. A Social Robot, “Dali,” for Aging in Place Technology. J. Robot. 2018, 2018, 6739652. [Google Scholar] [CrossRef] [Green Version]
- Fragapane, G.; Hvolby, H.H.; Sgarbossa, F.; Strandhagen, J.O. Autonomous Mobile Robots in Hospital Logistics. In Proceedings of the Advances in Production Management Systems. The Path to Digital Transformation and Innovation of Production Management Systems, Novi Sad, Serbia, 30 August–3 September 2020; Volume 591, pp. 672–679. [Google Scholar] [CrossRef]
- VITA. Available online: https://intouchhealth.com/?gdprorigin=true (accessed on 21 August 2022).
- Coradeschi, S.; Cesta, A.; Cortellessa, G.; Coraci, L.; Galindo, C.; Gonzalez, J.; Karlsson, L.; Forsberg, A.; Frennert, S.; Furfari, F.; et al. GiraffPlus: A System for Monitoring Activities and Physiological Parameters and Promoting Social Interaction for Elderly. Adv. Intell. Syst. Comput. 2014, 300, 261–271. [Google Scholar] [CrossRef]
- Coradeschi, S.; Cesta, A.; Cortellessa, G.; Coraci, L.; Gonzalez, J.; Karlsson, L.; Furfari, F.; Loutfi, A.; Orlandini, A.; Palumbo, F.; et al. GiraffPlus: Combining social interaction and long term monitoring for promoting independent living. In Proceedings of the 6th International Conference on Human System Interactions (HSI), Sopot, Poland, 6–8 June 2013; pp. 578–585. [Google Scholar]
- GIRAFF. Available online: http://www.giraff.org/ (accessed on 21 August 2022).
- Barea, R.; Bergasa, L.M.; López, E.; Escudero, M.S.; León, C. Face recognition for social interaction with a personal robotic assistant. In Proceedings of the EUROCON 2005—The International Conference on “Computer as a Tool”, Belgrade, Serbia, 21–24 November 2005; pp. 382–385. [Google Scholar]
- Das, S.; Saadatzi, M.; Wijayasinghe, I.; Abubakar, S.; Robinson, C.; Popa, D. Adaptive Robotic Nursing Assistant. U.S. Patent 20,220,152,837, 16 April 2019. [Google Scholar]
- Xiao, X.; Liu, F.; Fang, X.; Liu, R.; Wang, H.; Huang, K.; Zhang, G. Portable Intelligent Home Health Care Robot. CN209733965U, 27 July 2018. [Google Scholar]
- Kim, J.W.; Dang, V.C.; Shin, Y.B. Module and Method for Controling Home Service Robot Home Service Robot Computer Program. KR101981116B1, 17 November 2017. [Google Scholar]
- Krauss, G.; Fox, H. Multi-Device Robot Control. WO2019018810A1, 20 July 2018. [Google Scholar]
- Yue, L.; Xu, S. Split Type Home Healthcare Robot. U.S. Patent 10932672B2, 23 December 2017. [Google Scholar]
- Zhou, M.X.; Yang, H. Method and System for Creating Interactive Inquiry and Assessment Bots. U.S. Patent 10,635,752, 27 May 2016. [Google Scholar]
- Mun, K. Health Care Robot. KR20170127592A, 11 May 2016. [Google Scholar]
- Kaewkamnerdpong, B.; Jutharee, W.; Santatiwongchai, S. Automatic Mobile Robot for Facilitating Activities to Improve Child Development. U.S. Patent 10864453B2, 21 March 2016. [Google Scholar]
- Kidd, C.; Edwards, D.; Arnold, G.; Mirletz, B.; Voorhees, B. Method and System for Patient Engagement. U.S. Patent 10,452,816, 8 February 2016. [Google Scholar]
- Stephenson, P. System and Method for Improving Healthcare Through Social Robotics. U.S. Patent 10971256B2, 25 February 2009. [Google Scholar]
- Wang, V.; Deng, S. Virtual Companion. U.S. Patent 20140125678A1, 10 July 2013. [Google Scholar]
- DINSOW MINI. Available online: https://www.dinsow.com/ (accessed on 21 August 2022).
- LITTLE SOPHIA. Available online: https://www.hansonrobotics.com/little-sophia-2/ (accessed on 21 August 2022).
- BUDDY PRO. Available online: https://buddytherobot.com/ (accessed on 21 August 2022).
- ELLI-Q. Available online: https://elliq.com/ (accessed on 21 August 2022).
- SOTA. Available online: https://it.nttdata.com/services/solutions/sota (accessed on 21 August 2022).
- CANBOT U05. Available online: http://www.uurobot.com/ (accessed on 21 August 2022).
- RELAY. Available online: https://www.savioke.com (accessed on 21 August 2022).
- TUG T3. Available online: https://aethon.com/ (accessed on 21 August 2022).
- MOXI. Available online: https://www.diligentrobots.com/moxi (accessed on 21 August 2022).
- CSJBOT AKER-P. Available online: https://en.csjbot.com/ (accessed on 21 August 2022).
- CSJBOT AMY PLUS. Available online: https://www.csjbot.net/amy-plus-product/ (accessed on 21 August 2022).
- CSJBOT JUPITER SERVICE ROBOT. Available online: https://www.csjbot.net/jupiter-product/ (accessed on 21 August 2022).
- CSJBOT SNOW ROBOT. Available online: https://www.csjbot.net/snow-product/ (accessed on 21 August 2022).
- ROBOVIE R3. Available online: https://www.vstone.co.jp/products/robovie_r3/index.html (accessed on 21 August 2022).
- SOPHIA. Available online: https://www.hansonrobotics.com/sophia/ (accessed on 21 August 2022).
- Zia-ul-Haque, Q.S.M.; Wang, Z.; Jadoon, N.R. Investigating the Uncanny Valley and Human Desires for Interactive Robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–18 December 2007; pp. 2228–2233. [Google Scholar]
- Aloulou, A.; Boubaker, O. Control of a step walking combined to arms swinging for a three dimensional humanoid prototype. J. Comput. Sci. 2010, 6, 886–895. [Google Scholar] [CrossRef] [Green Version]
- Chung, H.; Kang, H.; Jun, S. Verbal anthropomorphism design of social robots: Investigating users’ privacy perception. Comput. Hum. Behav. 2023, 142, 107640. [Google Scholar] [CrossRef]
- Benedictis, R.D.; Umbrico, A.; Fracasso, F.; Cortellessa, G.; Orlandini, A.; Cesta, A. A dichotomic approach to adaptive interaction for socially assistive robots. User Model. User-Adapt. Interact. 2023, 33, 293–331. [Google Scholar] [CrossRef]
- Netzev, M.; Houbre, Q.; Airaksinen, E.; Angleraud, A.; Pieters, R. Many Faced Robot—Design and Manufacturing of a Parametric, Modular and Open Source Robot Head. In Proceedings of the 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 24–27 June 2019; pp. 342–348. [Google Scholar]
- Boyle, J.T. Robotic Device for Assisting Individuals with a Mental Illness. U.S. Patent 11,439,346, 3 January 2019. [Google Scholar]
- JIBO. Available online: https://jibo.com/ (accessed on 21 August 2022).
- ROBOVIE-PC. Available online: https://www.vstone.co.jp/english/products/robovie_pc/ (accessed on 21 August 2022).
- Salichs, M.A.; Castro-González, Á.; Salichs, E.; Fernández-Rodicio, E.; Maroto-Gómez, M.; Gamboa-Montero, J.J.; Marques-Villarroya, S.; Castillo, J.C.; Alonso-Martín, F.; Malfaz, M. Mini: A New Social Robot for the Elderly. Int. J. Soc. Robot. 2020, 12, 1231–1249. [Google Scholar] [CrossRef]
- Salamea, H.M.T.; Cedillo, P.A.S.; Alvarado-Cando, O.; Auquilla, A.R. Health care in the older adult by means of a bioloid robot as a social assistive to motivate physical exercise. In Proceedings of the 2019 7th International Engineering, Sciences and Technology Conference (IESTEC), Panama, Panama, 9–11 October 2019; pp. 508–513. [Google Scholar]
- Hasan, S.F.; Alwan, H.M. Design of hybrid controller for the trajectory tracking of wheeled mobile robot with mecanum wheels. J. Mech. Eng. Res. Dev. 2020, 43, 400–414. [Google Scholar]
- Salichs, M.A.; Barber, R.; Khamis, A.M.; Malfaz, M.; Gorostiza, J.F.; Pacheco, R.; Rivas, R.; Corrales, A.; Delgado, E.; García, D. Maggie: A robotic platform for human-robot social interaction. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 1–3 June 2006. [Google Scholar]
- Gupta, S.S.; Repczynska, I. Autonomous Companion Mobile Robot and System. U.S. Patent 10,946,528, 1 June 2018. [Google Scholar]
- Stahel, C.D.; Mcfarland, C.D.; Mckeon, S.D. Methods and Systems for a Companion Robot. U.S. Patent 16/499,573, 31 March 2017. [Google Scholar]
- Zheng, Y.; Cheung, J.C.W.; Tam, E.W.; Law, M.C.; Mak, A.H.Y.; Chan, T.T.C. Therapeutic Robot for Facilitating Training and Therapy for the Elderly. WO2021164700A1, 18 February 2020. [Google Scholar]
- Chen, Y.; Xie, J.; Gong, Y. Design, Analysis and Modeling of Flexible Arrayless Tactile Sensor under Sharp Contact. In Proceedings of the Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 3642–3647. [Google Scholar]
- Willemse, C.J.A.M.; van Erp, J.B.F. Social Touch in Human–Robot Interaction: Robot-Initiated Touches can Induce Positive Responses without Extensive Prior Bonding. Int. J. Soc. Robot. 2019, 11, 285–304. [Google Scholar] [CrossRef] [Green Version]
- Cabibihan, J.J.; Jegadeesan, R.; Salehi, S.; Ge, S.S. Synthetic skins with humanlike warmth. In Proceedings of the Second International Conference on Social Robotics, ICSR 2010, Singapore, 23–24 November 2010; Volume 6414, pp. 362–371. [Google Scholar] [CrossRef]
- Mazzei, D.; De Maria, C.; Vozzi, G. Touch sensor for social robots and interactive objects affective interaction. Sens. Actuators A Phys. 2016, 251, 92–99. [Google Scholar] [CrossRef] [Green Version]
- Kubota, A.; Peterson, E.I.C.; Rajendren, V.; Kress-Gazit, H.; Riek, L.D. JESSIE: Synthesizing social robot behaviors for personalized neurorehabilitation and beyond. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 121–129. [Google Scholar]
- Castillo, J.C.; Cáceres-Domínguez, D.; Alonso-Martín, F.; Castro-González, Á.; Salichs, M.Á. Dynamic Gesture Recognition for Social Robots. In Proceedings of the 9th International Conference, ICSR 2017, Tsukuba, Japan, 22–24 November 2017; Volume 10652, pp. 495–505. [Google Scholar] [CrossRef]
- Muthugala, M.A.V.J.; Srimal, P.H.D.A.S.; Jayasekara, A.G.B.P. Improving robot’s perception of uncertain spatial descriptors in navigational instructions by evaluating influential gesture notions. J. Multimodal User Interfaces 2021, 15, 11–24. [Google Scholar] [CrossRef]
- Abubakar, S.; Das, S.K.; Robinson, C.; Saadatzi, M.N.; Cynthia Logsdon, M.; Mitchell, H.; Chlebowy, D.; Popa, D.O. ARNA, a Service robot for Nursing Assistance: System Overview and User Acceptability. In Proceedings of the IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 1408–1414. [Google Scholar]
- Bandara, H.M.R.T.; Priyanayana, K.S.; Jayasekara, A.G.B.P.; Chandima, D.P. Enhancing human-robot interaction by amalgamating spatial and attribute based cognitive maps of assistive robot. In Proceedings of the 18th International Conference, ICAISC 2019, Zakopane, Poland, 16–20 June 2019; Volume 11509, pp. 633–642. [Google Scholar] [CrossRef]
- Filippini, C.; Perpetuini, D.; Cardone, D.; Chiarelli, A.M.; Merla, A. Thermal infrared imaging-based affective computing and its application to facilitate human robot interaction: A review. Appl. Sci. 2020, 10, 2924. [Google Scholar] [CrossRef] [Green Version]
- Breland, D.S.; Skriubakken, S.B.; Dayal, A.; Jha, A.; Yalavarthy, P.K.; Cenkeramaddi, L.R. Deep Learning-Based Sign Language Digits Recognition from Thermal Images with Edge Computing System. IEEE Sens. J. 2021, 21, 10445–10453. [Google Scholar] [CrossRef]
- TICO. Available online: https://www.adelerobots.com (accessed on 21 August 2022).
- Kaichi, T.; Maruyama, T.; Tada, M.; Saito, H. Resolving position ambiguity of imu-based human pose with a single RGB camera. Sensors 2020, 20, 5453. [Google Scholar] [CrossRef]
- Lazar, A.M.; Devassy, B.R.; King, G. Real-Time Operated Medical Assistive Robot. In Proceedings of the Third Congress on Intelligent Systems, Bangalore, India, 5–6 September 2022; Volume 613, pp. 777–788. [Google Scholar] [CrossRef]
- Cross, M.; Vu, C.; Bickmore, T.; Bolton, C.; Goetsch, J.; Gruber, A.; Singlair, K.; Wilde, L.; Williston, P.; Campbell, T.L. Companion Robot for Personal Interaction. U.S. Patent 7720572B2, 29 September 2006. [Google Scholar]
- Tanaka, M.; Shiotani, S.; Kenmochi, K.; Takizawa, K. Health Care Service System Using Robot. JP2006285425A, 31 March 2005. [Google Scholar]
- Du, D.; Xu, J.; Wang, Y. Obstacle recognition of indoor blind guide robot based on improved D-S evidence theory. J. Phys. Conf. Ser. 2021, 1820, 012053. [Google Scholar] [CrossRef]
- Corrales, A.; Salichs, M.A. Integration of a RFID system in a social robot. In Proceedings of the FIRA RoboWorld Congress 2009, Incheon, Korea, 16–20 August 2009; Volume 44, pp. 63–73. [Google Scholar] [CrossRef]
- Manikandan, P.; Ramesh, G.; Likith, G.; Sreekanth, D.; Durga Prasad, G. Smart Nursing Robot for COVID-19 Patients. In Proceedings of the International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, 4–5 March 2021; pp. 839–842. [Google Scholar]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A Localization Based on Unscented Kalman Filter and Particle Filter Localization Algorithms. IEEE Access 2020, 8, 2233–2246. [Google Scholar] [CrossRef]
- Jayawardena, C.; Kuo, I.H.; Broadbent, E.; MacDonald, B.A. Socially Assistive Robot HealthBot: Design, Implementation, and Field Trials. IEEE Syst. J. 2016, 10, 1056–1067. [Google Scholar] [CrossRef]
- Hong, T. Family Healthcare Management Robot. CN204318739U, 19 December 2014. [Google Scholar]
- Kim, Y.K. Nursing Robot and Mornitoring System Using Nursing Robot. KR20040034164A, 21 October 2002. [Google Scholar]
- Choi, B.H. Wellness and Human Care Robot. KR20130032891A, 11 March 2013. [Google Scholar]
- Pan, X.; Peng, L. Anthropomorphic System of Elder Nursing Robot. CN107336246B, 15 June 2017. [Google Scholar]
- Gonçalves, P.J.S.; Torres, P.M.B.; Lopes, P. ROBIHO—A robot companion for elderly people’s homes. Appl. Mech. Mater. 2013, 282, 158–161. [Google Scholar] [CrossRef]
- Portugal, D.; Santos, L.; Alvito, P.; Dias, J.; Samaras, G.; Christodoulou, E. SocialRobot: An interactive mobile robot for elderly home care. In Proceedings of the IEEE/SICE International Symposium on System Integration (SII), Nagoya, Japan, 11–13 December 2016; pp. 811–816. [Google Scholar]
- Saha, A.; Bhuiyan, M.M.H.; Saha, D.; Sara, S.A.; Zishan, M.S.R. Medbot- Design and Development of Medical Robot for Healthcare Digitalization. AIUB J. Sci. Eng. 2023, 22, 1–8. [Google Scholar] [CrossRef]
- Matsuo, K.; Barolli, L. Collision avoidance for omnidirectional automated transportation robots considering entropy approach. Lect. Notes Data Eng. Commun. Technol. 2018, 17, 142–151. [Google Scholar] [CrossRef]
- Correa, J.; Liu, J.; Yang, G.Z. Real time people tracking in crowded environments with range measurements. In Proceedings of the 5th International Conference, ICSR 2013, Bristol, UK, 27–29 October 2013; Volume 8239, pp. 471–480. [Google Scholar] [CrossRef]
- Cheng, L.; Zhao, A.; Wang, K.; Li, H.; Wang, Y.; Chang, R. Activity Recognition and Localization based on UWB Indoor Positioning System and Machine Learning. In Proceedings of the 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 4–7 November 2020; pp. 528–533. [Google Scholar]
- Clement Allognon, S.O.; De Britto, A.S.; Koerich, A.L. Continuous Emotion Recognition via Deep Convolutional Autoencoder and Support Vector Regressor. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020. [Google Scholar]
- Lajante, M.; Tojib, D.; Ho, T.I. When interacting with a service robot is (not) satisfying: The role of customers’ need for social sharing of emotion. Comput. Hum. Behav. 2023, 146, 107792. [Google Scholar] [CrossRef]
- Favis, S.J.; Srivastava, D. Robots for Interactive Comedy and Companionship. U.S. Patent 16/289,569, 31 August 2016. [Google Scholar]
- Lee, T.G.; Lee, S.W.; Lee, D.W.; Kim, J.Y.; Lee, H.G. Emotional Expression Equipment and Method in Android Robot. KR100813668B1, 20 December 2006. [Google Scholar]
- Bustos, P.; García, J.C.; Cintas, R.; Martirena, E.; Bachiller, P.; Núñez, P.; Bandera, A. DSR d: A Proposal for a Low-Latency, Distributed Working Memory for CORTEX. In Proceedings of the 21st International Workshop of Physical Agents (WAF 2020), Alcalá de Henares, Spain, 19–20 November 2020; Volume 1285, pp. 109–122. [Google Scholar] [CrossRef]
- Calderita, L.V.; Vega, A.; Barroso-Ramírez, S.; Bustos, P.; Núñez, P. Designing a cyber-physical system for ambient assisted living: A use-case analysis for social robot navigation in caregiving centers. Sensors 2020, 20, 5. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.P.; Singh, D.K.; Krishnan, J.; Ayub, S.; Billewar, S.R.; Singh, N.; Laddha, S.S.; Mane, P.S. Artificial Intelligence Based Computational Model for Spatial-Temporal and Emotional Reasoning of Humanoid Robots. AU2021102704A4, 20 May 2021. [Google Scholar]
- Yoon, S.-S. Robot System for Health Care Service and Method Thereof. WO2020122485A3, 14 December 2018. [Google Scholar]
- Wang, Y.; Bauknight, S.H.; Rogow, A.F.; Larson, J.D.; Drouin, J.P. Computer network architecture with machine learning and artificial intelligence and dynamic patient guidance. US10923233B1, 13 June 2018. [Google Scholar]
- Stokman, H.M.G.; van Oldenborgh, M.J.B. Adaptive Artificial Intelligence System for Event Categorizing by Switching between Different States. U.S. Patent 17/042,061, 29 March 2018. [Google Scholar]
- Ye, G.; Ye, J.Z. First Trainable Robot Doctor Named AIPD Using New Methods and Systems for Its Artificial Brain. U.S. Patent 15/844,666, 18 December 2017. [Google Scholar]
- Favis, S.; Srivastava, D. Multiple Interactive Personalities Robot. WO2017189559A1, 26 April 2016. [Google Scholar]
- Zhou, H.; Lin, L.; Zhuang, Y. Robot Intelligent Hospital Guidance System. CN106965193A, 31 March 2017. [Google Scholar]
- Lim, C.G.; Lee, C.S. Method for Recognizing User Intention. KR20170014704A, 31 July 2015. [Google Scholar]
- Zhang, B.; Sun, X.; Gao, Y.; Jia, J.; Wang, S.; Li, H.; Liu, D.; Wang, M. Emotional Dialogue Generation Method and System Based on Interactive Fusion. CN113254625B, 15 July 2021. [Google Scholar]
- Xu, K.; Chen, M.; You, L. The Hitchhiker’s Guide to a Credible and Socially Present Robot: Two Meta-Analyses of the Power of Social Cues in Human–Robot Interaction. Int. J. Soc. Robot. 2023, 15, 269–295. [Google Scholar] [CrossRef]
- Strathearn, C.; Ma, M. Modelling user preference for embodied artificial intelligence and appearance in realistic humanoid robots. Informatics 2020, 7, 28. [Google Scholar] [CrossRef]
- Lima, M.R.; Wairagkar, M.; Natarajan, N.; Vaitheswaran, S.; Vaidyanathan, R. Robotic Telemedicine for Mental Health: A Multimodal Approach to Improve Human-Robot Engagement. Front. Robot. AI 2021, 8, 618866. [Google Scholar] [CrossRef]
- Pu, Y.; Peng, J. Nounou Intelligent Monitoring Device for Health Care and Accompanying of the Old. CN107016224A, 3 October 2016. [Google Scholar]
- Kim, N.V.; Zhidkov, V.N.; Bodunkov, N.E.; Mamonov, A.V.; Fedorova, T.A.; Kim, T.V. Development of a medical social robot. In Proceedings of the 12th International Conference on Developments in eSystems Engineering (DeSE), Kazan, Russia, 7–10 October 2019; pp. 243–246. [Google Scholar]
- Gavril, A.F.; Ghita, A.S.; Sorici, A.; Florea, A.M. Towards a modular framework for human-robot interaction and collaboration. In Proceedings of the 22nd International Conference on Control Systems and Computer Science (CSCS), Bucharest, Romania, 28–30 May 2019; pp. 667–674. [Google Scholar]
- Callemein, T.; Van Beeck, K.; Goedemé, T. Multi-view real-time 3D occupancy map for machine-patient collision avoidance. In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021), Online, 8–10 February 2021; pp. 627–636. [Google Scholar]
- Ngo, H.Q.T.; Le, V.N.; Thien, V.D.N.; Nguyen, T.P.; Nguyen, H. Develop the socially human-aware navigation system using dynamic window approach and optimize cost function for autonomous medical robot. Adv. Mech. Eng. 2020, 12, 1–17. [Google Scholar] [CrossRef]
- Fischinger, D.; Einramhof, P.; Papoutsakis, K.; Wohlkinger, W.; Mayer, P.; Panek, P.; Hofmann, S.; Koertner, T.; Weiss, A.; Argyros, A.; et al. Hobbit, a care robot supporting independent living at home: First prototype and lessons learned. Robot. Auton. Syst. 2016, 75, 60–78. [Google Scholar] [CrossRef]
- Wang, Y.; Jordan, C.S.; Wright, T.; Chan, M.; Pinter, M.; Hanrahan, K.; Sanchez, D.; Ballantyne, J.; Herzog, C.; Whitney, B.; et al. Interfacing with a Mobile Telepresence Robot. WO2012103525A3, 28 January 2011. [Google Scholar]
- Gross, H.M.; Debes, K.; Einhorn, E.; Mueller, S.; Scheidig, A.; Weinrich, C.; Bley, A.; Martin, C. Mobile robotic rehabilitation assistant for walking and orientation training of stroke patients: A report on work in progress. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; pp. 1880–1887. [Google Scholar]
- Masmoudi, R.; Bouchouicha, M.; Gorce, P. Expressive robot to support elderly. Assist. Technol. Res. Ser. 2011, 29, 557–564. [Google Scholar] [CrossRef]
- Infantino, I.; Machí, A. Towards an assistive social robot interacting with human patient to establish a mutual affective support. In Proceedings of the 14th Italian Workshop, WIVACE 2019, Rende, Italy, 18–20 September 2019; Volume 1200, pp. 1–6. [Google Scholar] [CrossRef]
- Ozdemir, D.; Cibulka, J.; Stepankova, O.; Holmerova, I. Design and implementation framework of social assistive robotics for people with dementia—A scoping review. Health Technol. 2021, 11, 367–378. [Google Scholar] [CrossRef]
- Meng, L.; Yuesong, W.; Jinqi, L. Design of an Intelligent Service Robot based on Deep Learning. In Proceedings of the Proceedings of the 2020 8th International Conference on Information Technology: IoT and Smart City, Xi’an, China, 25–27 December 2020; pp. 153–158.
- Cooper, S.; Di Fava, A.; Vivas, C.; Marchionni, L.; Ferro, F. ARI: The Social Assistive Robot and Companion. In Proceedings of the 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 745–751. [Google Scholar]
- Borboni, A.; Aggogeri, F.; Pellegrini, N.; Faglia, R. Innovative modular SMA actuator. Adv. Mater. Res. 2012, 590, 405–410. [Google Scholar] [CrossRef]
- Goris, K.; Saldien, J.; Vanderborght, B.; Lefeber, D. How to achieve the huggable behavior of the social robot Probo? A reflection on the actuators. Mechatronics 2011, 21, 490–500. [Google Scholar] [CrossRef]
- Borboni, A.; De Santis, D.; Faglia, R. Large deflection of a non-linear, elastic, asymmetric Ludwick cantilever beam. In Proceedings of the ASME 2010 10th Biennial Conference on Engineering Systems Design and Analysis, ESDA2010, Istanbul, Turkey, 12–14 July 2010; pp. 99–106. [Google Scholar]
- Rattanagulvaranon, P.; Nithisoponpat, P.; Maliwan, N.; Mongkolluck, N.; Maneewarn, T. Embodiment of Interaction Design for a Compliant Social Robot. In Proceedings of the 19th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, ECTI-CON 2022, Prachuap Khiri Khan, Thailand, 24–27 May 2022. [Google Scholar]
- Amici, C.; Borboni, A.; Faglia, R.; Fausti, D.; Magnani, P.L. A parallel compliant meso-manipulator for finger rehabilitation treatments: Kinematic and dynamic analysis. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Nice, France, 22–26 September 2008; pp. 735–740. [Google Scholar]
- Islam, M.S.; Rahman, M.M.; Muhammad, G.; Hossain, M.S. Design of a Social Robot Interact with Artificial Intelligence by Versatile Control Systems. IEEE Sens. J. 2022, 22, 17542–17549. [Google Scholar] [CrossRef]
- Borboni, A.; Aggogeri, F.; Pellegrini, N.; Faglia, R. Precision point design of a cam indexing mechanism. Adv. Mater. Res. 2012, 590, 399–404. [Google Scholar] [CrossRef]
- Negrini, S.; Piovanelli, B.; Amici, C.; Cappellini, V.; Bovi, G.; Ferrarin, M.; Zaina, F.; Borboni, A. Trunk motion analysis: A systematic review from a clinical and methodological perspective. Eur. J. Phys. Rehabil. Med. 2016, 52, 583–592. [Google Scholar] [PubMed]
- Görür, O.C.; Rosman, B.; Sivrikaya, F.; Albayrak, S. Social Cobots: Anticipatory Decision-Making for Collaborative Robots Incorporating Unexpected Human Behaviors. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 398–406. [Google Scholar]
- Adamini, R.; Antonini, N.; Borboni, A.; Medici, S.; Nuzzi, C.; Pagani, R.; Pezzaioli, A.; Tonola, C. User-friendly human-robot interaction based on voice commands and visual systems. In Proceedings of the 2021 24th International Conference on Mechatronics Technology, ICMT 2021, Singapore, 18–22 December 2021. [Google Scholar]
- Luperto, M.; Monroy, J.; Renoux, J.; Lunardini, F.; Basilico, N.; Bulgheroni, M.; Cangelosi, A.; Cesari, M.; Cid, M.; Ianes, A.; et al. Integrating Social Assistive Robots, IoT, Virtual Communities and Smart Objects to Assist at-Home Independently Living Elders: The MoveCare Project. Int. J. Soc. Robot. 2022, 15, 517–545. [Google Scholar] [CrossRef]
- Zhang, Q.; Quan, R.; Qimuge, S.; Wei, R.; Zan, X.; Wang, F.; Chen, C.; Wei, Q.; Liu, X.; Qiao, F. On the Way from Lightweight to Powerful Intelligence: A Heterogeneous Multi-Robot Social System with IoT Devices. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Mexico City, Mexico, 20–24 August 2022; pp. 842–848. [Google Scholar]
- Zhao, Y.; Guo, M.; Sun, X.; Chen, X.; Zhao, F. Attention-based sensor fusion for emotion recognition from human motion by combining convolutional neural network and weighted kernel support vector machine and using inertial measurement unit signals. IET Signal Process. 2023, 17, e12201. [Google Scholar] [CrossRef]
- Borboni, A.; Elamvazuthi, I.; Cusano, N. EEG-Based Empathic Safe Cobot. Machines 2022, 10, 603. [Google Scholar] [CrossRef]
- Villafañe, J.H.; Valdes, K.; Vanti, C.; Pillastrini, P.; Borboni, A. Reliability of handgrip strength test in elderly subjects with unilateral thumb carpometacarpal osteoarthritis. Hand 2015, 10, 205–209. [Google Scholar] [CrossRef]
- Al-Quraishi, M.S.; Elamvazuthi, I.; Tang, T.B.; Al-Qurishi, M.S.; Adil, S.H.; Ebrahim, M.; Borboni, A. Decoding the User’s Movements Preparation from EEG Signals Using Vision Transformer Architecture. IEEE Access 2022, 10, 109446–109459. [Google Scholar] [CrossRef]
- Aggogeri, F.; Borboni, A.; Merlo, A.; Pellegrini, N.; Ricatto, R. Real-time performance of mechatronic PZT module using active vibration feedback control. Sensors 2016, 16, 1577. [Google Scholar] [CrossRef] [Green Version]
- Paterson, M. Social robots and the futures of affective touch. Senses Soc. 2023, 18, 110–125. [Google Scholar] [CrossRef]
- Takagi, K.; Rzepka, R.; Araki, K. Just keep tweeting, dear: Web-mining methods for helping a social robot understand user needs. In Proceedings of the AAAI Spring Symposium—Technical Report, Stanford, CA, USA, 21–23 March 2011; pp. 60–65. [Google Scholar]
- Toussaint, C.; Schwarz, P.T.; Petermann, M. Navel—A social robot with verbal and nonverbal communication skills. In Proceedings of the Conference on Human Factors in Computing Systems—Proceedings, Hamburg, Germany, 23–28 April 2023. [Google Scholar]
- Aggogeri, F.; Borboni, A.; Faglia, R. Reliability roadmap for mechatronic systems. Appl. Mech. Mater. 2013, 373–375, 130–133. [Google Scholar] [CrossRef]
- Sætra, H.S. First, They Came for the Old and Demented: Care and Relations in the Age of Artificial Intelligence and Social Robots. Hum. Arenas 2022, 5, 25–43. [Google Scholar] [CrossRef]
- Islam, M.J.; Hong, J.; Sattar, J. Person-following by autonomous robots: A categorical overview. Int. J. Robot. Res. 2019, 38, 1581–1618. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Jordan, C.S.; Wright, T.; Chan, M.; Pinter, M.; Hanrahan, K.; Sanchez, D.; Ballantyne, J.; Herzog, C.; Whitney, B.; et al. Time-Dependent Navigation of Telepresence Robots. U.S. Patent 9785149B2, 2 August 2013. [Google Scholar]
- Jordan, C.S.; Young, A.; Ng, M.S.; Lurie, Y.; Lai, F.; Wright, T.C.; Herzog, C.; Whitney, B.; Rizzi, B.; Ballantyne, J.; et al. Graphical User Interfaces Including Touchpad Driving Interfaces for Telemedicine Devices. U.S. Patent 9361021B2, 22 May 2012. [Google Scholar]
- Biswas, T.; Kumar Maduri, P.; Singh, R.; Srivastava, R.; Singh, K. Autonomous Robot to Perform Touch-less Assistance for Doctors. In Proceedings of the 2nd International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), Greater Noida, India, 18–19 December 2020; pp. 929–933. [Google Scholar]
- Arroyo, D.; Ishiguro, Y.; Tanaka, F. Design of a home telepresence robot system for supporting childcare. In Proceedings of the Computer Supported Cooperative Work and Social Computing, Portland, OR, USA, 25 February–1 March 2017; pp. 131–134. [Google Scholar]
- Wein, L.M. Robotic Medical System Having Human Collaborative Modes. U.S. Patent 17/311,201, 4 December 2018. [Google Scholar]
- Van Straten, C.L.; Peter, J.; Kühne, R. Transparent robots: How children perceive and relate to a social robot that acknowledges its lack of human psychological capacities and machine status. Int. J. Hum. Comput. Stud. 2023, 177, 103063. [Google Scholar] [CrossRef]
- Yew, G.C.K. Trust in and Ethical Design of Carebots: The Case for Ethics of Care. Int. J. Soc. Robot. 2021, 13, 629–645. [Google Scholar] [CrossRef] [PubMed]
- Vasylkovskyi, V.; Guerreiro, S.; Sequeira, J.S. BlockRobot: Increasing Privacy in Human Robot Interaction by Using Blockchain. In Proceedings of the IEEE International Conference on Blockchain (Blockchain), Rhodes, Greece, 2–6 November 2020; pp. 106–115. [Google Scholar]
- Cusano, N. Cobot and Sobot: For a new Ontology of Collaborative and Social Robots. Found. Sci. 2022. [Google Scholar] [CrossRef]
- Alves-Oliveira, P.; Orr, A.; Björling, E.A.; Cakmak, M. Connecting the Dots of Social Robot Design from Interviews with Robot Creators. Front. Robot. AI 2022, 9, 720799. [Google Scholar] [CrossRef]
- Olivier, M.; Rey, S.; Voilmy, D.; Ganascia, J.G.; Lan Hing Ting, K. Combining Cultural Probes and Interviews with Caregivers to Co-Design a Social Mobile Robotic Solution. IRBM 2023, 44, 100729. [Google Scholar] [CrossRef]
- Borboni, A.; Mor, M.; Faglia, R. Gloreha-Hand Robotic Rehabilitation: Design, Mechanical Model, and Experiments. J. Dyn. Syst. Meas. Control Trans. ASME 2016, 138, 111003. [Google Scholar] [CrossRef]
- Formicola, R.; Amici, C.; Mor, M.; Bissolotti, L.; Borboni, A. Design of Medical Devices with Usability in Mind: A Theoretical Proposal and Experimental Case Study Using the LEPRE Device. Designs 2023, 7, 9. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TRL | Description |
|---|---|
| 1 | basic principles observed |
| 2 | technology concept formulated |
| 3 | experimental proof of concept |
| 4 | technology validated in lab |
| 5 | technology validated in relevant environment (industrially relevant environment in the case of key enabling technologies) |
| 6 | technology demonstrated in relevant environment (industrially relevant environment in the case of key enabling technologies) |
| 7 | system prototype demonstration in operational environment |
| 8 | system complete and qualified |
| 9 | actual system proven in operational environment (competitive manufacturing in the case of key enabling technologies or in space) |
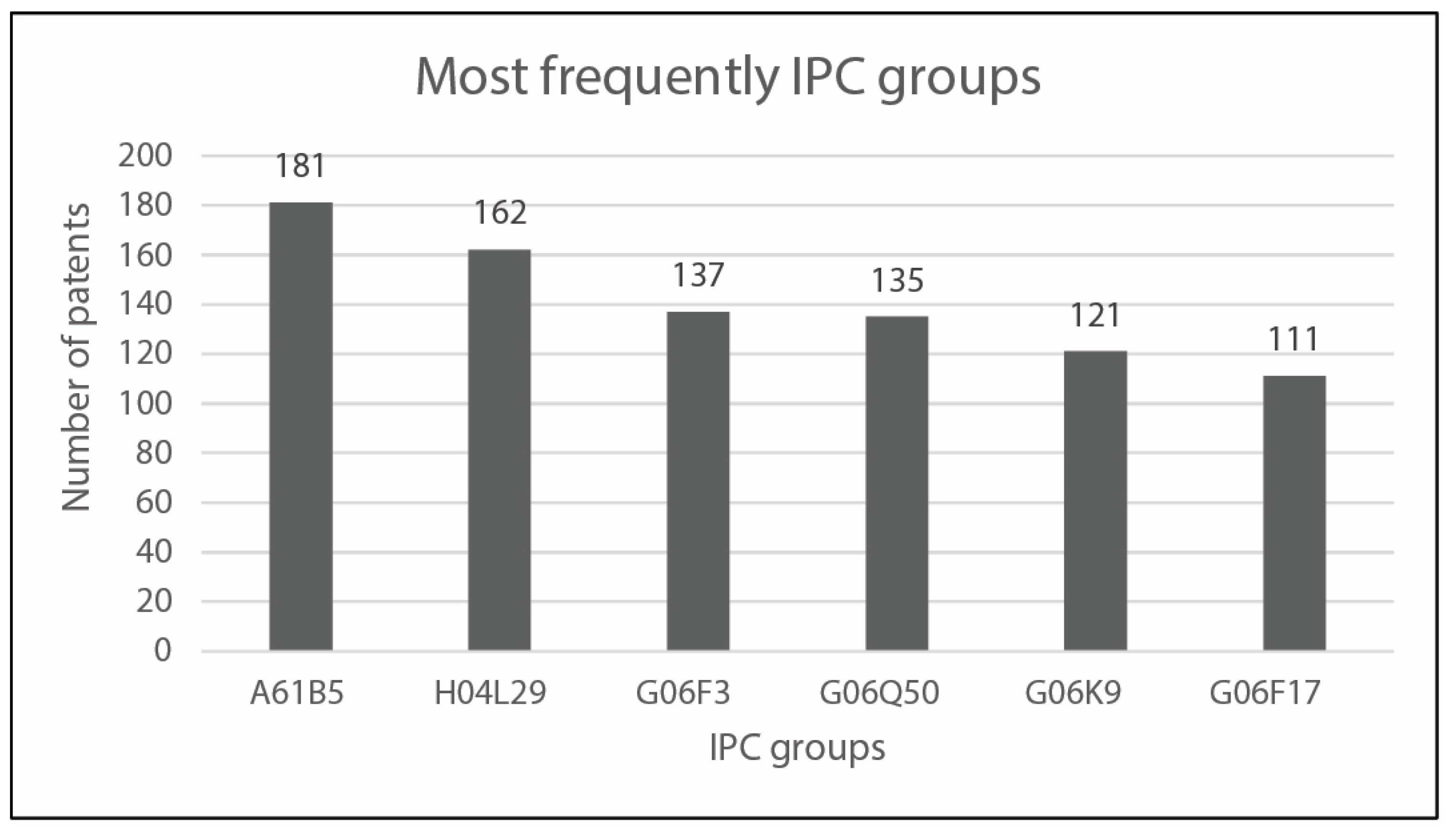
| IPC Group | N. of Patents | IPC Group | N. of Patents | IPC Group | N. of Patents | IPC Group | N. of Patents |
|---|---|---|---|---|---|---|---|
| A61B5 | 181 | G10L15 | 43 | A61P25 | 21 | G05B13 | 15 |
| H04L29 | 162 | B25J11 | 42 | A63F13 | 21 | G06N99 | 15 |
| G06F3 | 137 | G06T7 | 41 | B25J19 | 21 | G06T15 | 15 |
| G06Q50 | 135 | G05B19 | 37 | G06F11 | 21 | G10L25 | 15 |
| G06K9 | 121 | G06F15 | 36 | C12M1 | 20 | H04W8 | 15 |
| G06F17 | 111 | H04M1 | 36 | C12N5 | 19 | A61B90 | 14 |
| G06Q30 | 101 | H04W12 | 35 | G01N1 | 19 | A61P43 | 14 |
| G06Q10 | 95 | H04N7 | 34 | H04B1 | 19 | G01B11 | 14 |
| G06F19 | 88 | C12N15 | 33 | H04N21 | 19 | G09B5 | 14 |
| G16H40 | 86 | H04L9 | 33 | H04W84 | 19 | H04L5 | 14 |
| G06F21 | 84 | G06F1 | 31 | A61K45 | 18 | H04M3 | 14 |
| G16H50 | 81 | H04N5 | 31 | B01L3 | 18 | A61B6 | 13 |
| G16H20 | 78 | G06T19 | 30 | C12N1 | 18 | A63B71 | 13 |
| G06F16 | 77 | G01N35 | 29 | G01S7 | 18 | C07H21 | 13 |
| G16H10 | 74 | G06Q40 | 29 | G06F40 | 18 | G06F7 | 13 |
| H04W4 | 73 | G08B21 | 29 | G06N7 | 18 | G16H30 | 13 |
| G06N20 | 68 | G09B19 | 27 | A61B8 | 17 | A61B34 | 12 |
| G01N33 | 58 | A61K31 | 25 | G06F13 | 17 | A61H1 | 12 |
| G06N5 | 58 | B25J13 | 25 | H04W88 | 17 | A63B21 | 12 |
| H04L12 | 58 | G16H80 | 24 | A61K9 | 16 | G06F8 | 12 |
| B25J9 | 56 | G02B27 | 23 | A61N1 | 16 | G08B25 | 12 |
| G06N3 | 54 | G05D1 | 23 | C07K14 | 16 | G09G5 | 12 |
| C12Q1 | 51 | G06T11 | 22 | G01N21 | 16 | G16H70 | 12 |
| G06F9 | 45 | H04Q9 | 22 | C07K16 | 15 | H01L31 | 12 |
| G06Q20 | 44 | A61K39 | 21 | G01S17 | 15 | H04B17 | 12 |
| H04N19 | 12 |
| Type of Robot | Models |
|---|---|
| Humanoid robots | NAO [16,17,18,19,20,21]; PEPPER [22,23,24,25,26,27,28]; ROBOTIS OP3 [29]; INMOOV [30]; KIRO [31]; ARASH [32]; RAPIRO [33]; BRIAN 2.1 [34]; KISMET [35]. |
| Pet companion -bots | NECORO [36,37]; PARO [9,38,39]; AIBO [10,36,39]; HUGGABLE [39,40]; THERABOT [41]; PLEO [39], SNUGGLEBOT [42], HAPTIC CREATURE [43,44], EDU’ [45], MAYA [46] |
| Telepresence robots | TURTLEBOT 2 [47,48,49]; CHICARO [50]; DALI [51]; INTOUCH VITA [52,53]; GIRAFFPLUS [54,55,56]; SIRA [57]. |
| Highly Actuated Robots (DOF) | Slightly Actuated Robots (DOF) |
|---|---|
| NAO (25) | RP-VITA (5) |
| PEPPER (20) | HUGGABLE (8) |
| INMOOV (47) | THERABOT (10) |
| ROBOTIS OP3 (20) | CHICARO (4) |
| KIRO (18) | EMIR (4) |
| ARASH (15) | RAPIRO (12) |
| KISMET (21—actuated face) | ARNA (7—robotic arm) |
| AIBO (22) | ROREAS (6) |
| Device | Advantages | Disadvantages |
|---|---|---|
| LiDAR | High detection accuracy | Long response time |
| Expensive | ||
| Infrared sensor | Not expensive | Low accuracy |
| Light provides interfaces | ||
| Ultrasonic sensor | High frequencies | Easily affected by noise |
| Good directivity | Low accuracy | |
| Short wavelengths | Expensive | |
| Indicated for low-speed and short-distance measurements |
| Service | Peculiar Features |
|---|---|
| Amazon Polly Speech Synthesis [146] | Text to speech algorithm |
| Google Text-To-Speech [147] | Text to speech algorithm |
| Google Speech-To-Text [147] | Speech to text algorithm |
| PocketSphynx [19,148] | Speech recognition algorithm |
| IBM Tone Analyzer [147] | Emotions from text algorithm |
| YOLO V3 [25,26,134,149,150] | Object detection algorithm |
| Yolact ++ [151] | Object detection algorithm |
| SLAM [26,32,47,51,106,118,152,153,154] | Mapping and navigation algorithm |
| Baudi [146] | Face recognition algorithm |
| Procrob Functional [19] | Face recognition algorithm |
| Euclid [146] | Face recognition algorithm |
| Viola-Jones algorithm [155,156] | Face recognition algorithm |
| Google Dialogflow [19] | Speech and text machine learning service |
| IBM Watson Assistant [147,157] | Question answering computing system |
| Amazon Lex [19,146] | Deep learning service for natural speech recognition |
| Feature | Description |
|---|---|
| Correct data outline | Robotic events (i.e., videos or RFID tags read) are sent to BlockRobot. Human’s identities are pseudonymized and unrecognizable to robots. |
| Data persistence | Private data are hashed and stored on blockchain for verifiability. Private data can be stored in a ledger (off-chain device) external repository and encrypted. The solution proposed is a public key infrastructure. Robots’ signature needed to mark data recorded. |
| User interface and blockchain transaction | Intuitive “GUI” is provided. Possibility for the user involved to erase or access data. Digital signature by user is required. Blockchain’s block building is immutable and unchangeable. Data accountability is assured because on blockchain is present the history of all data. |
| Identity management by blockchain | Registration of users on the network through the BlockRobot API with subsequent smart contract authorization. Authentication of pre-registered users. |
| Core functionalities | Adding private data by hashing. RFID events and video recordings are both collected by the robot and processed by BlockRobot API. The private data are hashed to provide a new transaction to build the block for the chain. Private data are finally encrypted and stored off-chain. Accessing private data through smart contract that verifies the user identity, a new transaction is generated, and private data hashed before are accessible as the original one on user’s GUI. Deleting private data through smart contract transaction after verifying user’s identity. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ragno, L.; Borboni, A.; Vannetti, F.; Amici, C.; Cusano, N. Application of Social Robots in Healthcare: Review on Characteristics, Requirements, Technical Solutions. Sensors 2023, 23, 6820. https://doi.org/10.3390/s23156820
Ragno L, Borboni A, Vannetti F, Amici C, Cusano N. Application of Social Robots in Healthcare: Review on Characteristics, Requirements, Technical Solutions. Sensors. 2023; 23(15):6820. https://doi.org/10.3390/s23156820
Chicago/Turabian StyleRagno, Luca, Alberto Borboni, Federica Vannetti, Cinzia Amici, and Nicoletta Cusano. 2023. "Application of Social Robots in Healthcare: Review on Characteristics, Requirements, Technical Solutions" Sensors 23, no. 15: 6820. https://doi.org/10.3390/s23156820