

Tomato Maturity Detection and Counting Model Based on MHSA-YOLOv8

Abstract
:1. Introduction
- (1)
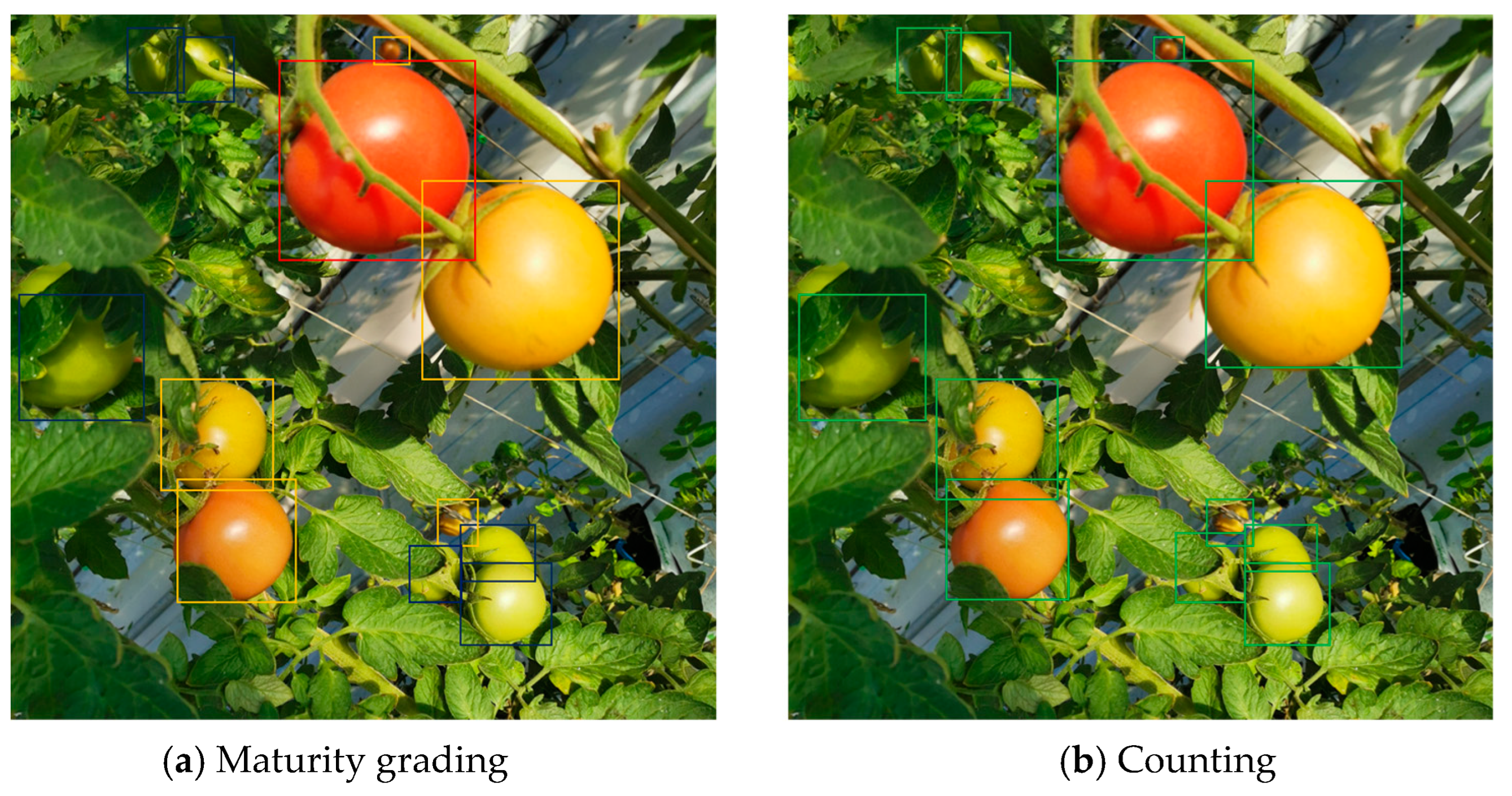
- A tomato maturity grading and counting dataset consisting of three categories and one category was constructed, taking into account practical challenges such as external light interference and occlusion.
- (2)
- A target detection method based on MHSA-YOLOv8 has been proposed, further improving the model detection performance of YOLOv8.
- (3)
- From the perspective of multi-task model construction, tomato maturity grading and counting models were constructed, respectively, providing technical support for unmanned operations during tomato planting.
2. Materials and Methods
2.1. Data Acquisition
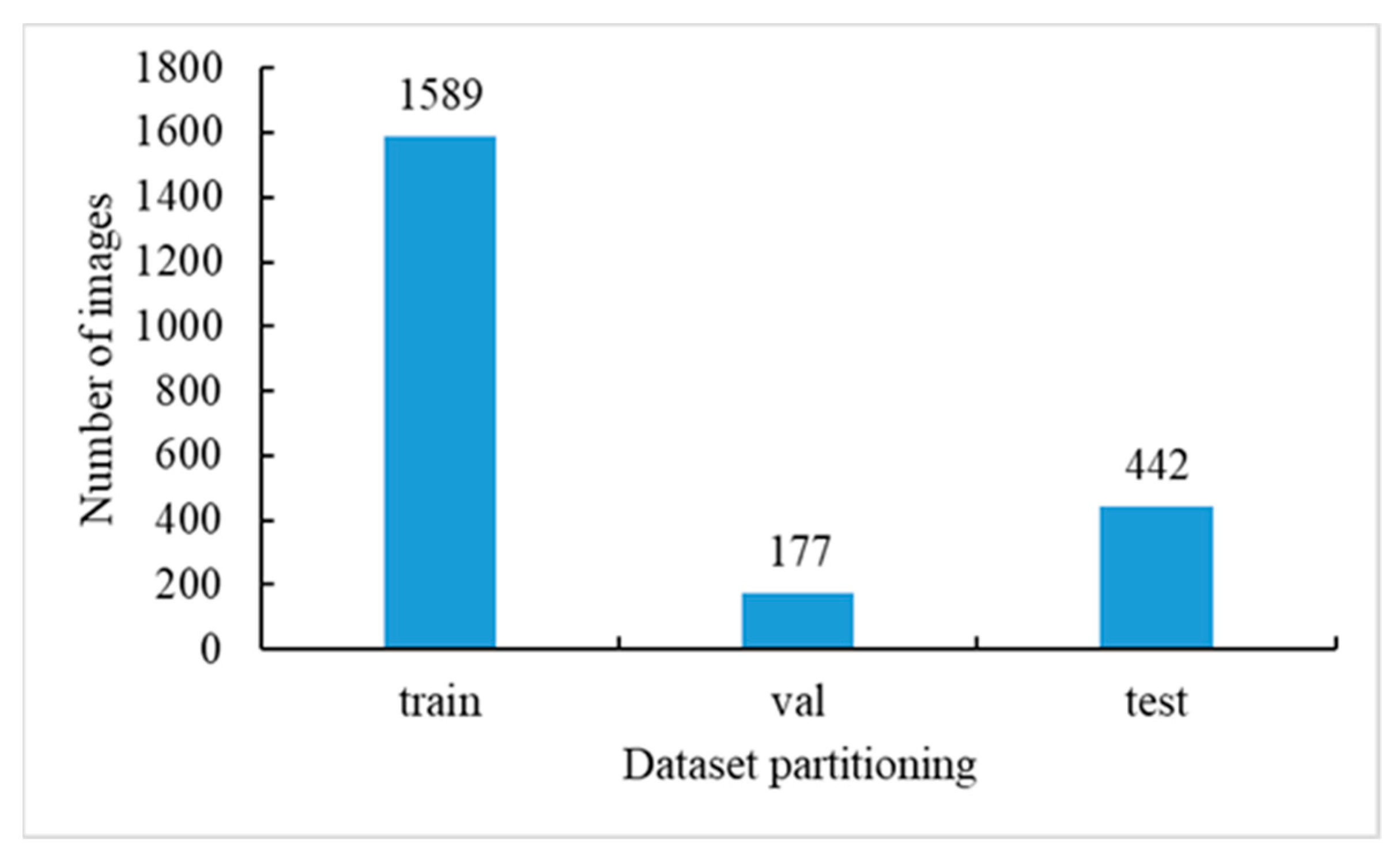
2.2. Data Preprocessing
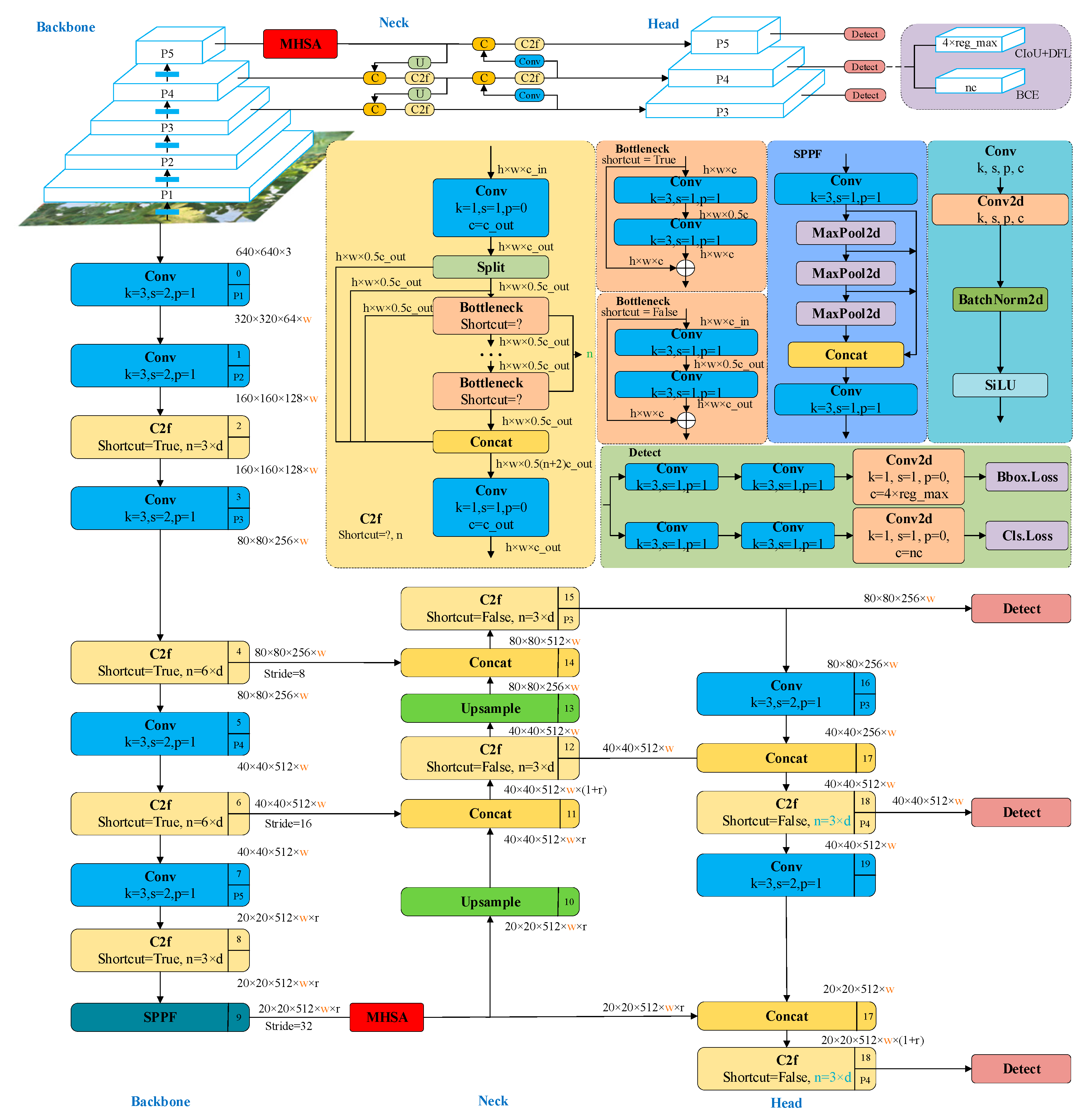
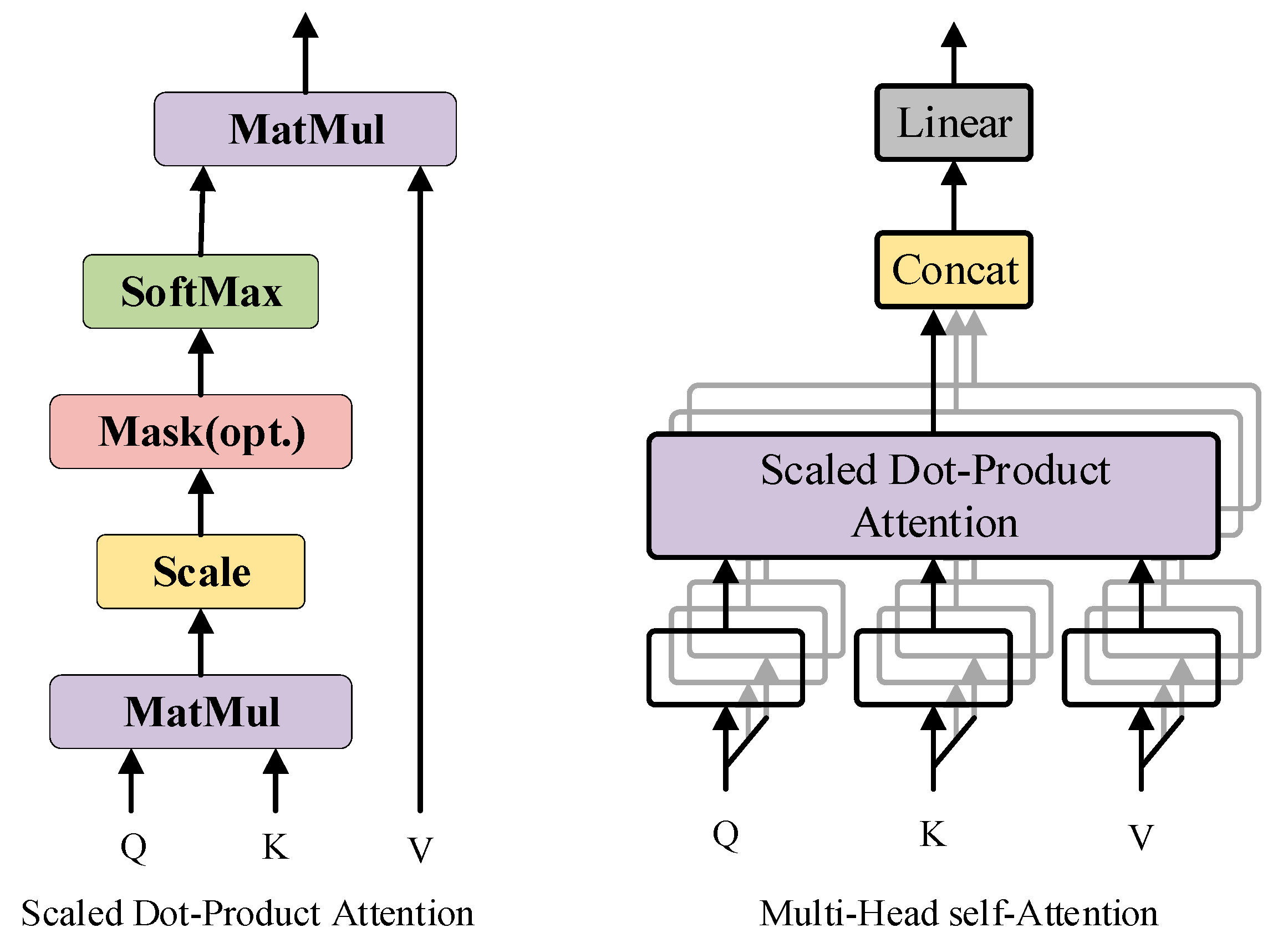
2.3. MHSA-YOLOV8
2.3.1. Model Input
2.3.2. Backbone
2.3.3. Neck
2.3.4. Head
2.3.5. Network Structure Parameters
2.4. Model Train and Evaluation
3. Experimental Results
3.1. Comparison of Modeling Results of Classical Object Detection Methods
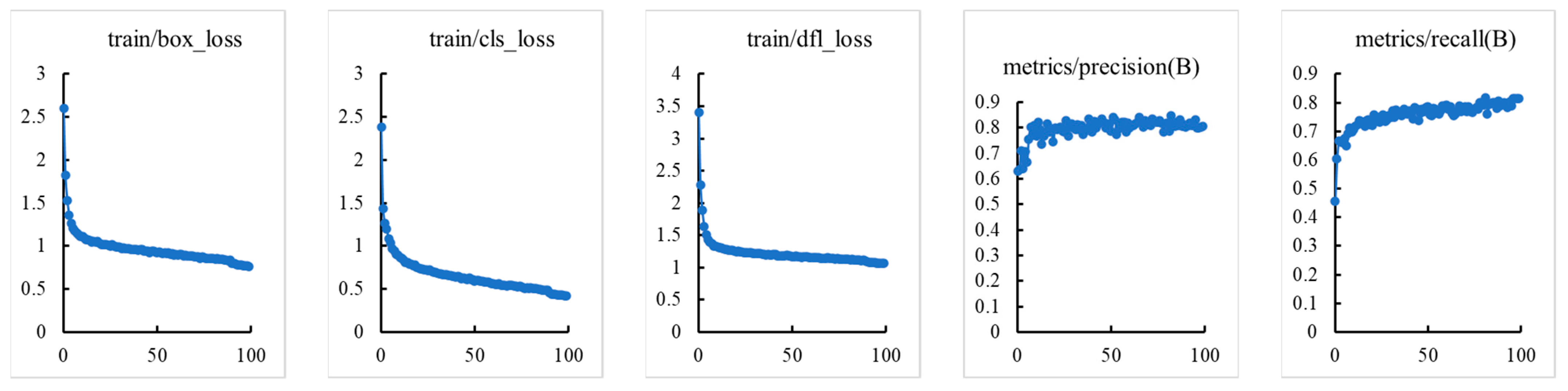
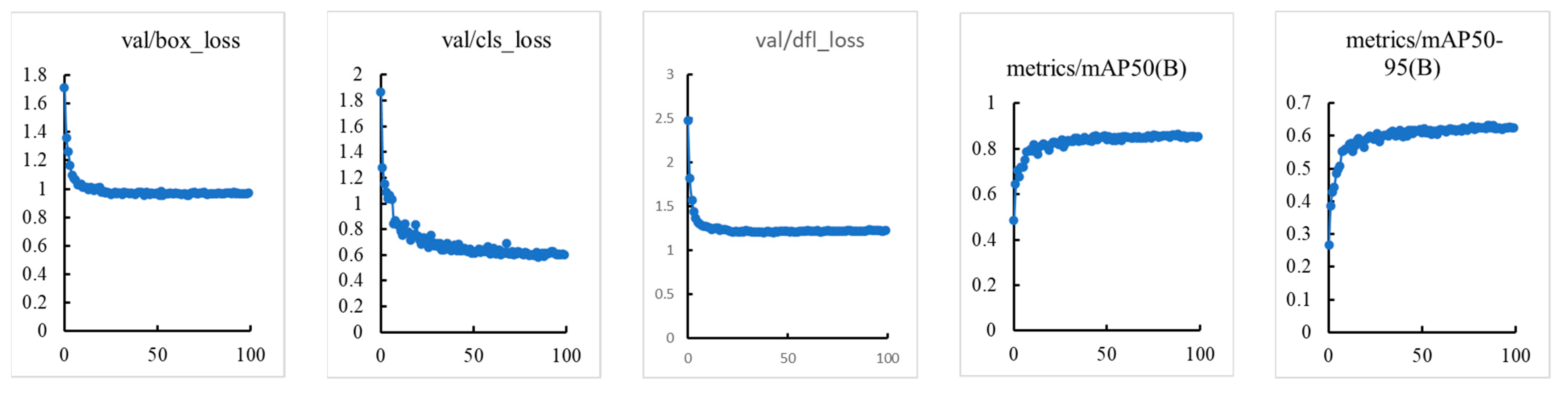
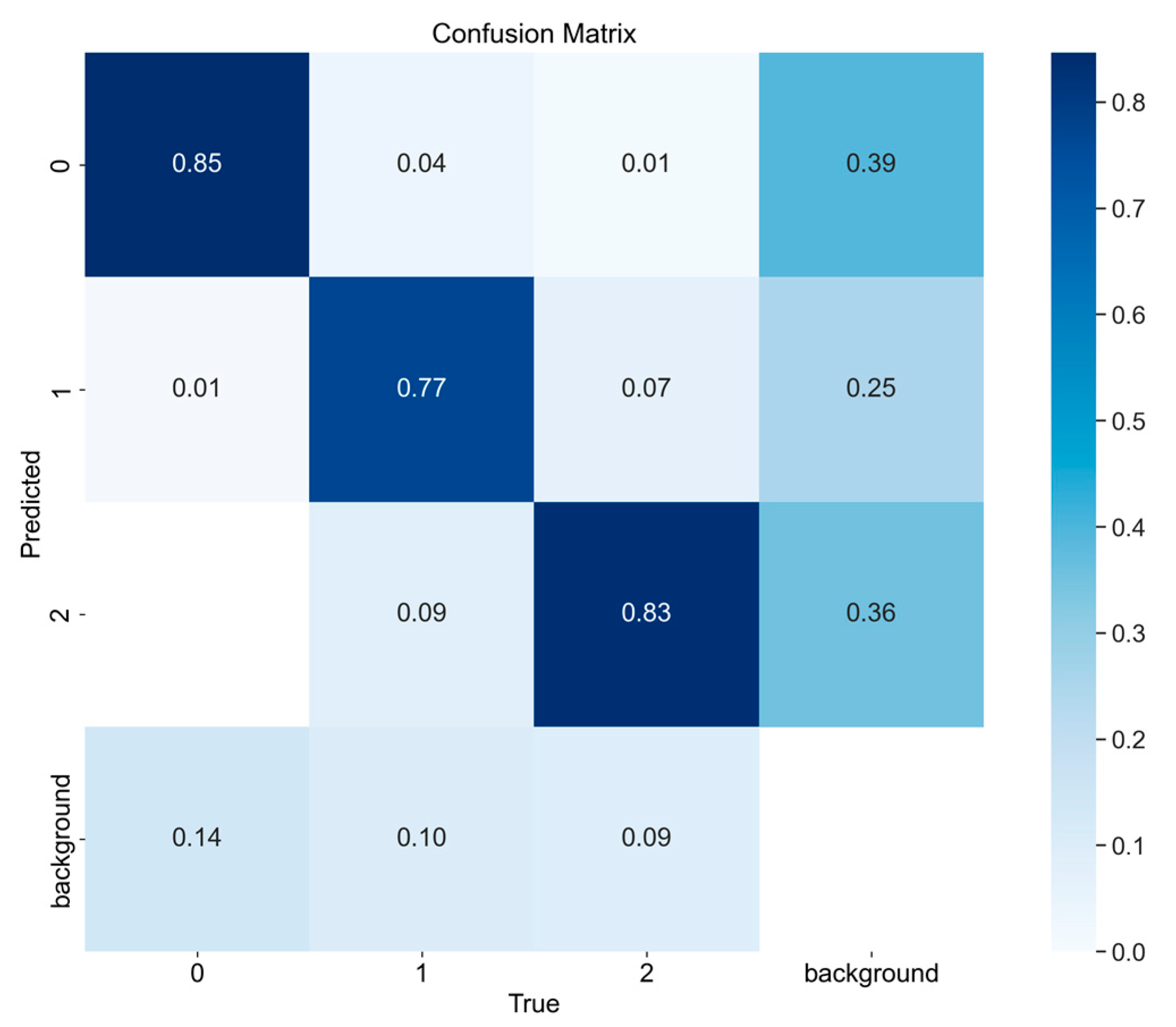
3.2. Modeling Results of Tomato Maturity Detection Model Based on MHSA-YOLOV8
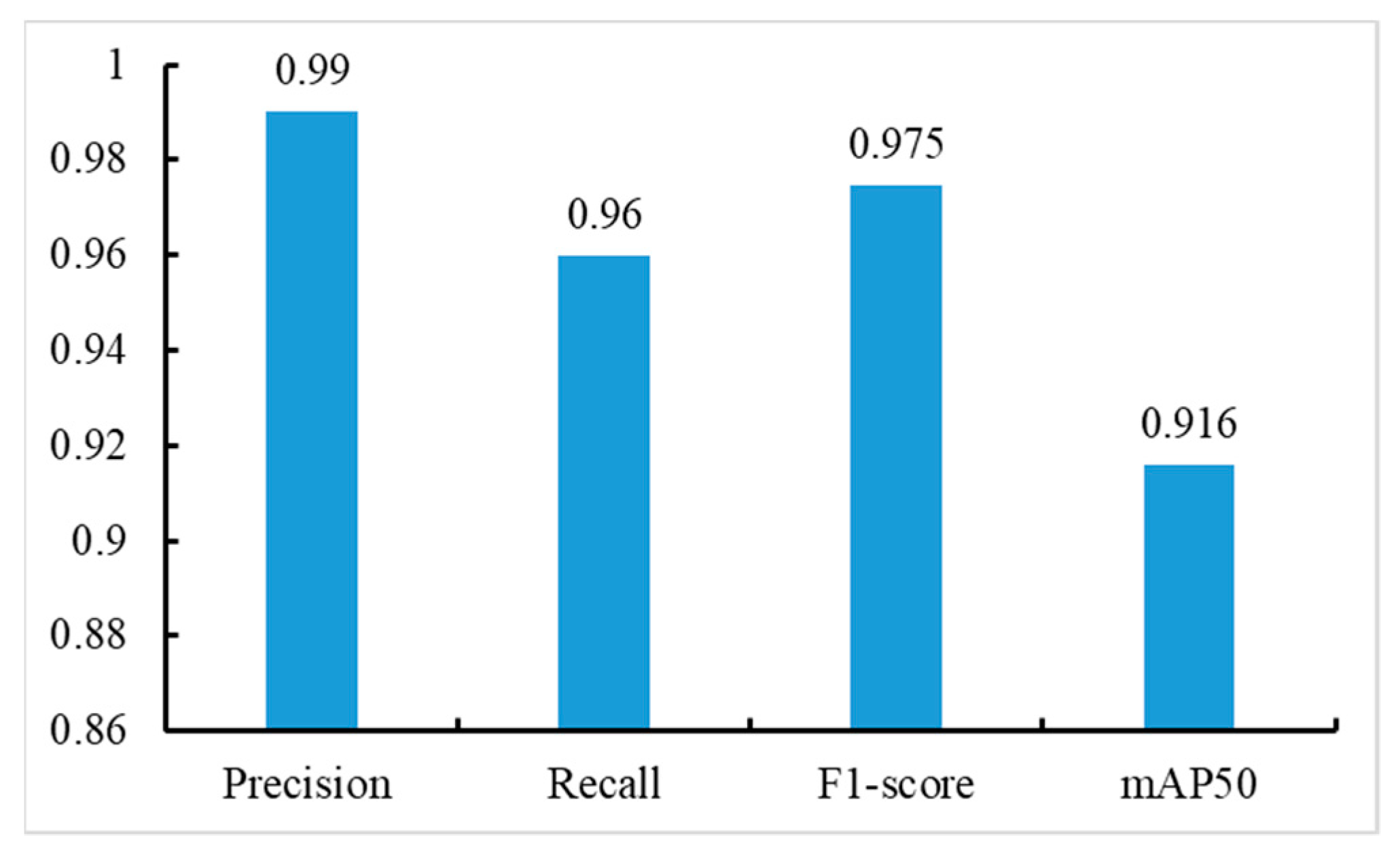
3.3. Modeling Results of Tomato Counting Model Based on MHSA-YOLOv8
3.4. Practical Application Effect of Tomato Maturity Detection and Counting
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Malik, M.H.; Zhang, T.; Li, H.; Zhang, M.; Shabbir, S.; Saeed, A. Mature Tomato Fruit Detection Algorithm Based on Improved HSV and Watershed Algorithm. IFAC PapersOnLine 2018, 51, 431–436. [Google Scholar] [CrossRef]
- Choi, K.; Lee, G.; Han, Y.J.; Bunn, J.M. Tomato Maturity Evaluation Using Color Image Analysis. Trans. Am. Soc. Agric. Eng. 1995, 38, 171–176. [Google Scholar] [CrossRef]
- Li, B.; Lecourt, J.; Bishop, G. Advances in Non-Destructive Early Assessment of Fruit Ripeness towards Defining Optimal Time of Harvest and Yield Prediction—A Review. Plants 2018, 7, 3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, X.; Yang, S.X. A Practical Solution for Ripe Tomato Recognition and Localisation. J. Real Time Image Process. 2013, 8, 35–51. [Google Scholar] [CrossRef]
- Fatchurrahman, D.; Amodio, M.L.; de Chiara, M.L.V.; Chaudhry, M.M.A.; Colelli, G. Early Discrimination of Mature-and Immature-Green Tomatoes (Solanum lycopersicum L.) Using Fluorescence Imaging Method. Postharvest Biol. Technol. 2020, 169, 111287. [Google Scholar] [CrossRef]
- Faisal, M.; Alsulaiman, M.; Arafah, M.; Mekhtiche, M.A. IHDS: Intelligent Harvesting Decision System for Date Fruit Based on Maturity Stage Using Deep Learning and Computer Vision. IEEE Access 2020, 8, 167985–167997. [Google Scholar] [CrossRef]
- Hussain, A.; Pu, H.; Sun, D.W. Innovative Nondestructive Imaging Techniques for Ripening and Maturity of Fruits—A Review of Recent Applications. Trends Food Sci. Technol. 2018, 72, 144–152. [Google Scholar] [CrossRef]
- Garillos-Manliguez, C.A.; Chiang, J.Y. Multimodal Deep Learning and Visible-Light and Hyperspectral Imaging for Fruit Maturity Estimation. Sensors 2021, 21, 1288. [Google Scholar] [CrossRef] [PubMed]
- Muthulakshmi, A.; Renjith, P.N. Comprehensive Systematic Review on Fruit Maturity Detection Technique. In Proceedings of the Second International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, 4–6 August 2021; pp. 1234–1240. [Google Scholar] [CrossRef]
- Abdelhamid, M.A.; Sudnik, Y.; Alshinayyin, H.J.; Shaaban, F. Non-Destructive Method for Monitoring Tomato Ripening Based on Chlorophyll Fluorescence Induction. J. Agric. Eng. 2021, 52. [Google Scholar] [CrossRef]
- Lockman, N.A.; Hashim, N.; Onwude, D.I. Laser-Based Imaging for Cocoa Pods Maturity Detection. Food Bioprocess Technol. 2019, 12, 1928–1937. [Google Scholar] [CrossRef]
- Bonora, A.; Bortolotti, G.; Bresilla, K.; Grappadelli, L.C.; Manfrini, L. A Convolutional Neural Network Approach to Detecting Fruit Physiological Disorders and Maturity in ‘Abbé Fétel’ Pears. Biosyst. Eng. 2021, 212, 264–272. [Google Scholar] [CrossRef]
- Lu, S.; Chen, W.; Zhang, X.; Karkee, M. Canopy-Attention-YOLOv4-Based Immature/Mature Apple Fruit Detection on Dense-Foliage Tree Architectures for Early Crop Load Estimation. Comput. Electron. Agric. 2022, 193, 106696. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Surya Prabha, D.; Satheesh Kumar, J. Assessment of Banana Fruit Maturity by Image Processing Technique. J. Food Sci. Technol. 2015, 52, 1316–1327. [Google Scholar] [CrossRef] [Green Version]
- Kinjo, H.; Oshiro, N.; Duong, S.C. Fruit Maturity Detection Using Neural Network and an Odor Sensor: Toward a Quick Detection. In Proceedings of the 10th Asian Control Conference (ASCC), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 39–42. [Google Scholar] [CrossRef]
- Hasanuddin, N.H.; Wahid, M.H.A.; Shahimin, M.M.; Hambali, N.A.M.A.; Yusof, N.R.; Nazir, N.S.; Khairuddin, N.Z.; Azidin, M.A.M. Metal Oxide Based Surface Acoustic Wave Sensors for Fruits Maturity Detection. In Proceedings of the 2016 3rd International Conference on Electronic Design (ICED), Phuket, Thailand, 11–12 August 2016; pp. 52–55. [Google Scholar] [CrossRef]
- Chen, L.Y.; Wong, D.M.; Fang, C.Y.; Chiu, C.I.; Chou, T.I.; Wu, C.C.; Chiu, S.W.; Tang, K.T. Development of an Electronic-Nose System for Fruit Maturity and Quality Monitoring. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 1129–1130. [Google Scholar] [CrossRef]
- Kaur, H.; Sawhney, B.K.; Jawandha, S.K. Evaluation of Plum Fruit Maturity by Image Processing Techniques. J. Food Sci. Technol. 2018, 55, 3008–3015. [Google Scholar] [CrossRef]
- Fadchar, N.A.; Cruz, J.C.D. A Non-Destructive Approach of Young Coconut Maturity Detection Using Acoustic Vibration and Neural Network. In Proceedings of the 2020 16th IEEE International Colloquium on Signal Processing & Its Applications (CSPA), Langkawi, Malaysia, 28–29 February 2020; pp. 136–140. [Google Scholar] [CrossRef]
- Raj, T.; Hashim, F.H.; Huddin, A.B.; Hussain, A.; Ibrahim, M.F.; Abdul, P.M. Classification of Oil Palm Fresh Fruit Maturity Based on Carotene Content from Raman Spectra. Sci. Rep. 2021, 11, 18315. [Google Scholar] [CrossRef]
- Zhang, Y.; Yin, X.; Zou, X.; Zhao, J. On-Line Sorting Maturity of Cherry Tomato by Machine Vision. IFIP Adv. Inf. Commun. Technol. 2009, 295, 2223–2229. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Mao, H.; Han, X.; Yin, J. Vision-Based Judgment of Tomato Maturity under Growth Conditions. Afr. J. Biotechnol. 2011, 10, 3616–3623. [Google Scholar]
- El-Bendary, N.; El Hariri, E.; Hassanien, A.E.; Badr, A. Using Machine Learning Techniques for Evaluating Tomato Ripeness. Expert Syst. Appl. 2015, 42, 1892–1905. [Google Scholar] [CrossRef]
- Tanvi, M.; Vinay, K.; Gupta, P. Maturity and Disease Detection in ToMato Using Computer Vision. In Proceedings of the 2016 Fourth International Conference on Parallel, Distributed and Grid Computing (PDGC), Waknaghat, India, 22–24 December 2016; pp. 399–403. [Google Scholar] [CrossRef]
- Lu, H.; Wang, F.; Liu, X.; Wu, Y. Rapid Assessment of Tomato Ripeness Using Visible/Near-Infrared Spectroscopy and Machine Vision. Food Anal. Methods 2017, 10, 1721–1726. [Google Scholar] [CrossRef]
- Mohammadi, V.; Kheiralipour, K.; Ghasemi-Varnamkhasti, M. Detecting Maturity of Persimmon Fruit Based on Image Processing Technique. Sci. Hortic. 2015, 184, 123–128. [Google Scholar] [CrossRef]
- Abbas, M. Image Analysis for Mango Fruit Defect Identification and Maturity Detection. 2017. Available online: https://www.researchgate.net/publication/369025864_Image_Analysis_for_Mango_Fruit_Defect_Identification_and_Maturity_Detection (accessed on 27 June 2023).
- Sahu, D.; Potdar, R.M. Defect Identification and Maturity Detection of Mango Fruits Using Image Analysis. Am. J. Artif. Intell. 2017, 1, 5–14. [Google Scholar] [CrossRef]
- Khojastehnazhand, M.; Mohammadi, V.; Minaei, S. Maturity Detection and Volume Estimation of Apricot Using Image Processing Technique. Sci. Hortic. 2019, 251, 247–251. [Google Scholar] [CrossRef]
- Khisanudin, I.S. Murinto Dragon Fruit Maturity Detection Based-HSV Space Color Using Naive Bayes Classifier Method. IOP Conf. Ser. Mater. Sci. Eng. 2020, 771, 6–12. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Chen, J. Detecting Maturity in Fresh Lycium barbarum L. Fruit Using Color Information. Horticulturae 2021, 7, 108. [Google Scholar] [CrossRef]
- Kasampalis, D.S.; Tsouvaltzis, P.; Ntouros, K.; Gertsis, A.; Gitas, I.; Siomos, A.S. The Use of Digital Imaging, Chlorophyll Fluorescence and Vis/NIR Spectroscopy in Assessing the Ripening Stage and Freshness Status of Bell Pepper Fruit. Comput. Electron. Agric. 2021, 187, 106265. [Google Scholar] [CrossRef]
- Mutha, S.A.; Shah, A.M.; Ahmed, M.Z. Maturity Detection of Tomatoes Using Deep Learning. SN Comput. Sci. 2021, 2, 441. [Google Scholar] [CrossRef]
- Garillos-Manliguez, C.A.; Chiang, J.Y. Multimodal Deep Learning via Late Fusion for Non-Destructive Papaya Fruit Maturity Classification. In Proceedings of the 2021 18th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 10–12 November 2021. [Google Scholar] [CrossRef]
- Quan, P.; Lou, Y.; Lin, H.; Liang, Z.; Di, S. Research on Fast Identification and Location of Contour Features of Electric Vehicle Charging Port in Complex Scenes. IEEE Access 2021, 10, 26702–26714. [Google Scholar] [CrossRef]
- Liu, J.; Pi, J.; Xia, L. A Novel and High Precision Tomato Maturity Recognition Algorithm Based on Multi-Level Deep Residual Network. Multimed. Tools Appl. 2020, 79, 9403–9417. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, P.; Dai, G.; Yan, J.; Yang, Z. Tomato Fruit Maturity Detection Method Based on YOLOV4 and Statistical Color Model. In Proceedings of the 2021 IEEE 11th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Jiaxing, China, 27–31 July 2021; pp. 904–908. [Google Scholar]
- Hsieh, K.W.; Huang, B.Y.; Hsiao, K.Z.; Tuan, Y.H.; Shih, F.P.; Hsieh, L.C.; Chen, S.; Yang, I.C. Fruit Maturity and Location Identification of Beef Tomato Using R-CNN and Binocular Imaging Technology. J. Food Meas. Charact. 2021, 15, 5170–5180. [Google Scholar] [CrossRef]
- Valiente, L.D.; Parco, K.M.R.; Sangalang, G.C.P. Non-Destructive Image Processing Analysis for Defect Identification and Maturity Detection on Avocado Fruit. In Proceedings of the 2021 5th International Conference on Communication and Information Systems (ICCIS), Chongqing, China, 15–17 October 2021; pp. 175–179. [Google Scholar] [CrossRef]
- Tu, S.; Xue, Y.; Zheng, C.; Qi, Y.; Wan, H.; Mao, L. Detection of Passion Fruits and Maturity Classification Using Red-Green-Blue Depth Images. Biosyst. Eng. 2018, 175, 156–167. [Google Scholar] [CrossRef]
- Schumann, A.W.; Mood, N.S.; Mungofa, P.D.K.; MacEachern, C.; Zaman, Q.U.; Esau, T. Detection of Three Fruit Maturity Stages in Wild Blueberry Fields Using Deep Learning Artificial Neural Networks. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2010; pp. 2–8. [Google Scholar] [CrossRef]
- MacEachern, C.B.; Esau, T.J.; Schumann, A.W.; Hennessy, P.J.; Zaman, Q.U. Deep Learning Artificial Neural Networks for Detection of Fruit Maturity Stage in Wild Blueberries. In Proceedings of the2021 ASABE Annual International Virtual Meeting, Virtual, 12–16 July 2021; pp. 1–11. [Google Scholar]
- Siricharoen, P.; Yomsatieankul, W.; Bunsri, T. Fruit Maturity Grading Framework for Small Dataset Using Single Image Multi-Object Sampling and Mask R-CNN. Smart Agric. Technol. 2023, 3, 100130. [Google Scholar] [CrossRef]
- Chen, S.; Xiong, J.; Jiao, J.; Xie, Z.; Huo, Z.; Hu, W. Citrus Fruits Maturity Detection in Natural Environments Based on Convolutional Neural Networks and Visual Saliency Map. Precis. Agric. 2022, 23, 1515–1531. [Google Scholar] [CrossRef]
- Qiu, C.; Tian, G.; Zhao, J.; Liu, Q.; Xie, S.; Zheng, K. Grape Maturity Detection and Visual Pre-Positioning Based on Improved YOLOv4. Electronics 2022, 11, 2677. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, L.; Liu, Y. Hemerocallis Citrina Baroni Maturity Detection Method Integrating Lightweight Neural Network and Dual Attention Mechanism. Electronics 2022, 11, 2743. [Google Scholar] [CrossRef]
- Begum, N.; Hazarika, M.K. Maturity Detection of Tomatoes Using Transfer Learning. Meas. Food 2022, 7, 100038. [Google Scholar] [CrossRef]
- Li, Z.; Jiang, X.; Shuai, L.; Zhang, B.; Yang, Y.; Mu, J. A Real-Time Detection Algorithm for Sweet Cherry Fruit Maturity Based on YOLOX in the Natural Environment. Agronomy 2022, 12, 2482. [Google Scholar] [CrossRef]
- Reis, D.; Kupec, J.; Hong, J.; Daoudi, A. Real-Time Flying Object Detection with YOLOv8. arXiv 2023, arXiv:2305.09972. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. Adv. Neural Inf. Process. Syst. 2017, 2017, 5999–6009. [Google Scholar]
- MacEachern, C.B.; Esau, T.J.; Schumann, A.W.; Hennessy, P.J.; Zaman, Q.U. Detection of Fruit Maturity Stage and Yield Estimation in Wild Blueberry Using Deep Learning Convolutional Neural Networks. Smart Agric. Technol. 2023, 3, 100099. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | From | n | Params | Module | Arguments |
|---|---|---|---|---|---|
| 0 | −1 | 1 | 928 | Conv | [3, 32, 3, 2] |
| 1 | −1 | 1 | 18,560 | Conv | [32, 64, 3, 2] |
| 2 | −1 | 1 | 29,056 | C2f | [64, 64, 1, True] |
| 3 | −1 | 1 | 79,384 | Conv | [64, 128, 3, 2] |
| 4 | −1 | 2 | 197,632 | C2f | [128, 128, 2, True] |
| 5 | −1 | 1 | 295,424 | Conv | [128, 256, 3, 2] |
| 6 | −1 | 2 | 788,480 | C2f | [256, 256, 2, True] |
| 7 | −1 | 1 | 1,180,672 | Conv | [256, 512, 3, 2] |
| 8 | −1 | 1 | 1,838,080 | C2f | [512, 512, 1, True] |
| 9 | −1 | 1 | 656,896 | SPPF | [512, 512, 5] |
| 10 | −1 | 1 | 787,968 | MHSA | [512, 14, 14, 4] |
| 11 | −1 | 1 | 0 | Upsample | [None, 2, ‘nearest’] |
| 12 | [−1, 6] | 1 | 0 | Concat | [1] |
| 13 | −1 | 1 | 591,360 | C2f | [768, 256, 1] |
| 14 | −1 | 1 | 0 | Upsample | [None, 2, ‘nearest’] |
| 15 | [−1, 4] | 1 | 0 | Concat | [1] |
| 16 | −1 | 1 | 148,224 | C2f | [384, 128, 1] |
| 17 | −1 | 1 | 147,712 | Conv | [128, 128, 3, 2] |
| 18 | [−1, 13] | 1 | 0 | Concat | [1] |
| 19 | −1 | 1 | 493,056 | C2f | [384, 256, 1] |
| 20 | −1 | 1 | 590,336 | Conv | [256, 256, 3, 2] |
| 21 | [−1, 10] | −1 | 0 | Concat | [1] |
| 22 | −1 | 1 | 1,969,152 | C2f | [768, 512, 1] |
| 23 | [16, 19, 22] | 1 | 2,117,209 | Detect | [3, [128, 256, 512]] |
| summary: 230 layers, 11,924,729 parameters, 11,924,713 gradients, 29.3 GFLOPs | |||||
| Parameters | Value |
|---|---|
| Image-size | 640 × 640 |
| Epochs | 100 |
| Batch-size | 8 |
| lr | 0.01 |
| Momentum | 0.937 |
| Weight_decay | 0.0005 |
| warmup_epochs | 3 |
| Optimizer | SGD |
| Loss | VFL_loss, CIOU_loss + DFL |
| Methods | Precision | Recall | F1-Score | mAP50 | Model-Size |
|---|---|---|---|---|---|
| Faster-RCNN | 54.0% | 0.616 | 0.576 | 0.597 | 108 M |
| YOLOv3 | 80.9% | 0.761 | 0.784 | 0.772 | 235 M |
| YOLOv4 | 81.6% | 0.671 | 0.736 | 0.768 | 244 M |
| YOLOv5 | 84.0% | 0.684 | 0.754 | 0.778 | 14.1 M |
| YOLOv7 | 74.7% | 0.751 | 0.749 | 0.798 | 72 M |
| YOLOv8 | 84.7% | 0.763 | 0.803 | 0.859 | 21.4 M |
| Methods | Class | Precision | Recall | F1-Score | mAP50 | Model-Size |
|---|---|---|---|---|---|---|
| YOLOv8 | all | 84.7% | 0.763 | 0.803 | 0.859 | 21.4 M |
| IM | 89.4% | 0.779 | 0.833 | 0.878 | ||
| SM | 80.8% | 0.702 | 0.751 | 0.815 | ||
| M | 83.9% | 0.809 | 0.824 | 0.883 | ||
| MHSA-YOLOv8 | all | 80.6% | 0.807 | 0.806 | 0.864 | 22.9 M |
| IM | 84.6% | 0.829 | 0.837 | 0.88 | ||
| SM | 76.4% | 0.764 | 0.764 | 0.824 | ||
| M | 80.7% | 0.828 | 0.817 | 0.888 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Zheng, J.; Li, P.; Long, H.; Li, M.; Gao, L. Tomato Maturity Detection and Counting Model Based on MHSA-YOLOv8. Sensors 2023, 23, 6701. https://doi.org/10.3390/s23156701
Li P, Zheng J, Li P, Long H, Li M, Gao L. Tomato Maturity Detection and Counting Model Based on MHSA-YOLOv8. Sensors. 2023; 23(15):6701. https://doi.org/10.3390/s23156701
Chicago/Turabian StyleLi, Ping, Jishu Zheng, Peiyuan Li, Hanwei Long, Mai Li, and Lihong Gao. 2023. "Tomato Maturity Detection and Counting Model Based on MHSA-YOLOv8" Sensors 23, no. 15: 6701. https://doi.org/10.3390/s23156701