
Battery-SOC Estimation for Hybrid-Power UAVs Using Fast-OCV Curve with Unscented Kalman Filters

 ,
,  ,
, 
Abstract
:1. Introduction
2. Model Selection, Testing Method, and Parameter Identification
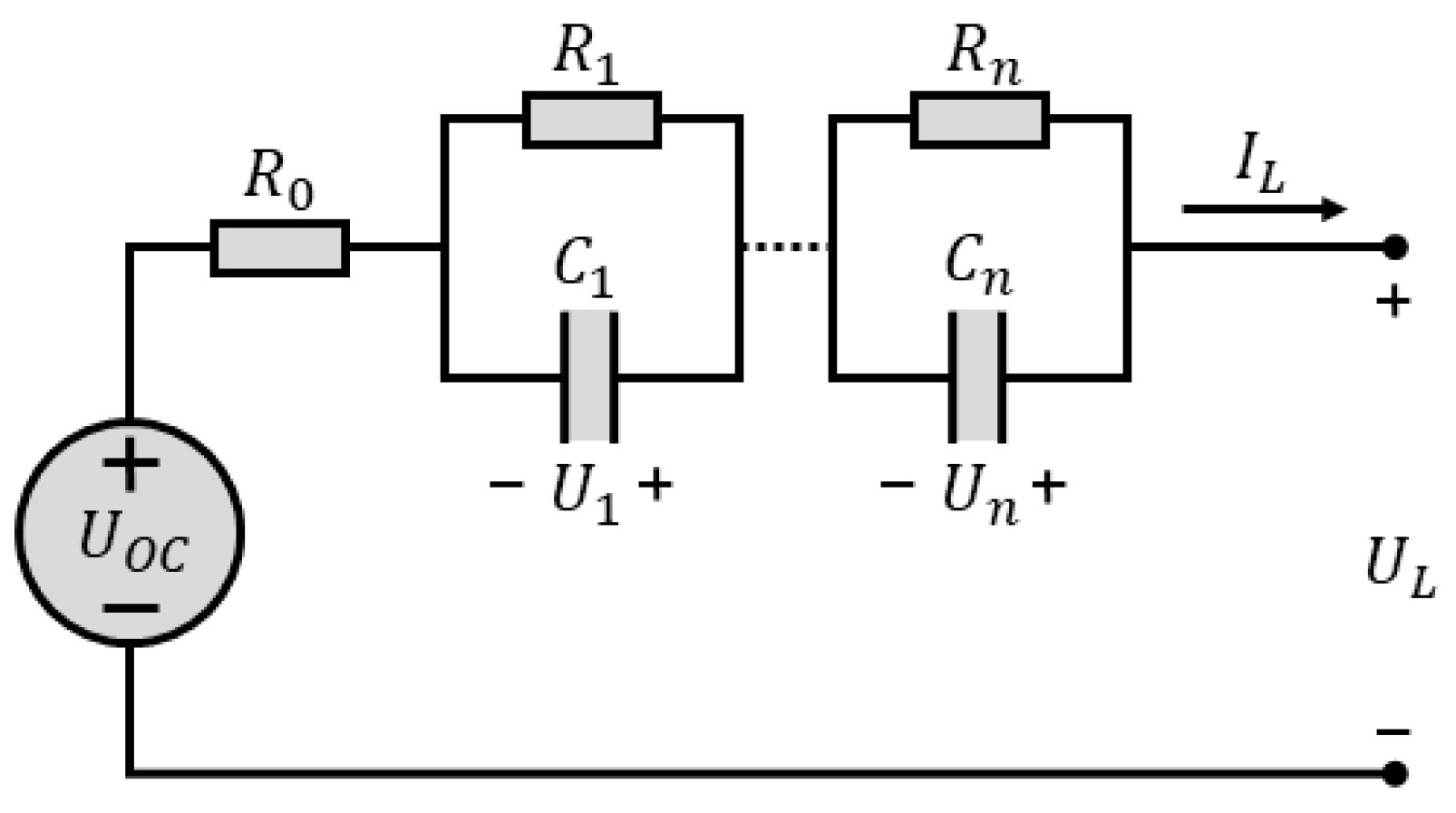
2.1. Equivalent Circuit Models
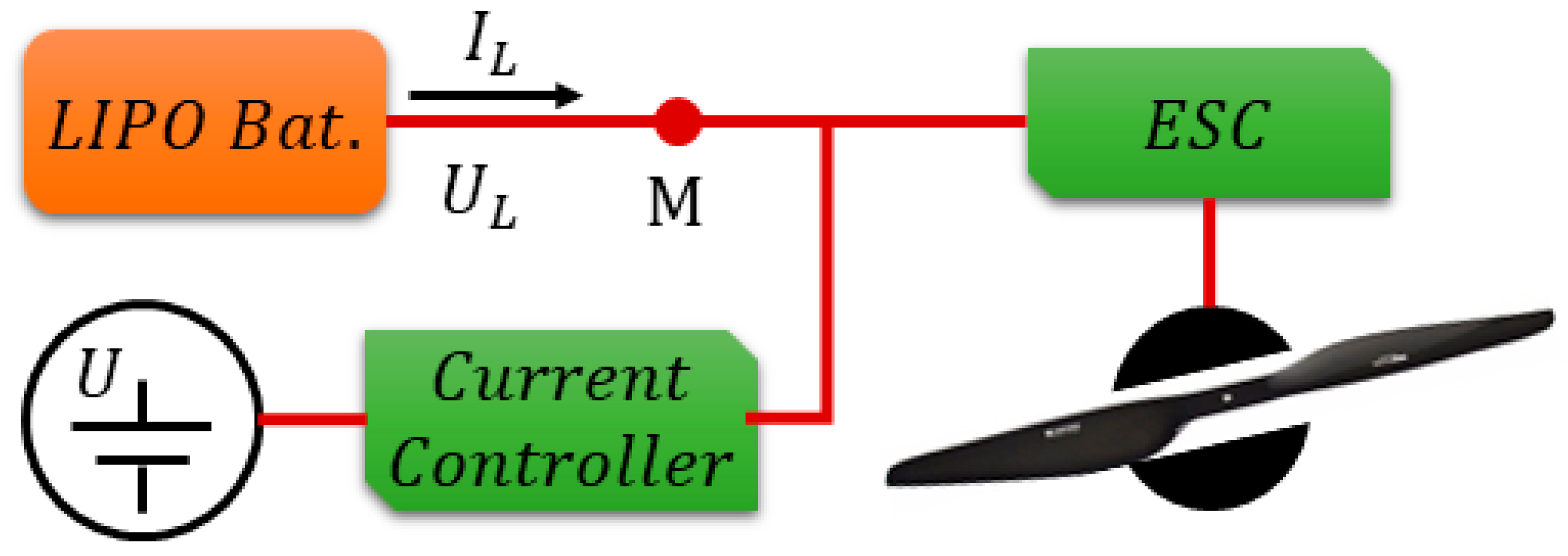
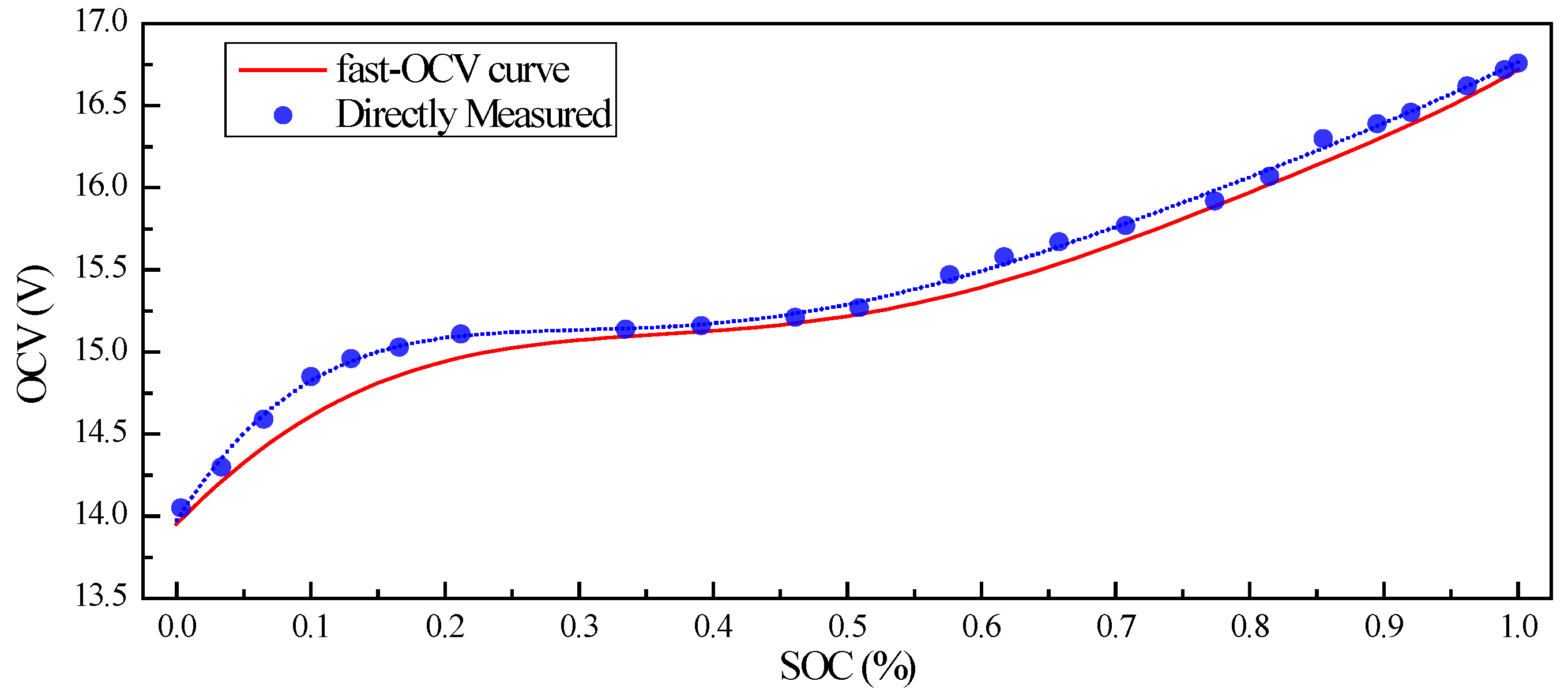
2.2. Open-Circuit Voltage and Testing Method
2.3. Parameter Identification
3. AUKF for SOC Estimation
3.1. State Equation and Observation Equation for Thevenin Battery Model
3.2. Adaptive Unscented Kalman Filter
- (1)
- State value and covariance initialization:
- (2)
- Sigma-point generation:
- (3)
- Coefficient calculation:
- (4)
- Process update for sigma points and covariance:
- (5)
- Kalman-gain calculation:
- (6)
- State and covariance update:
- (7)
- Adaptive noise estimation:
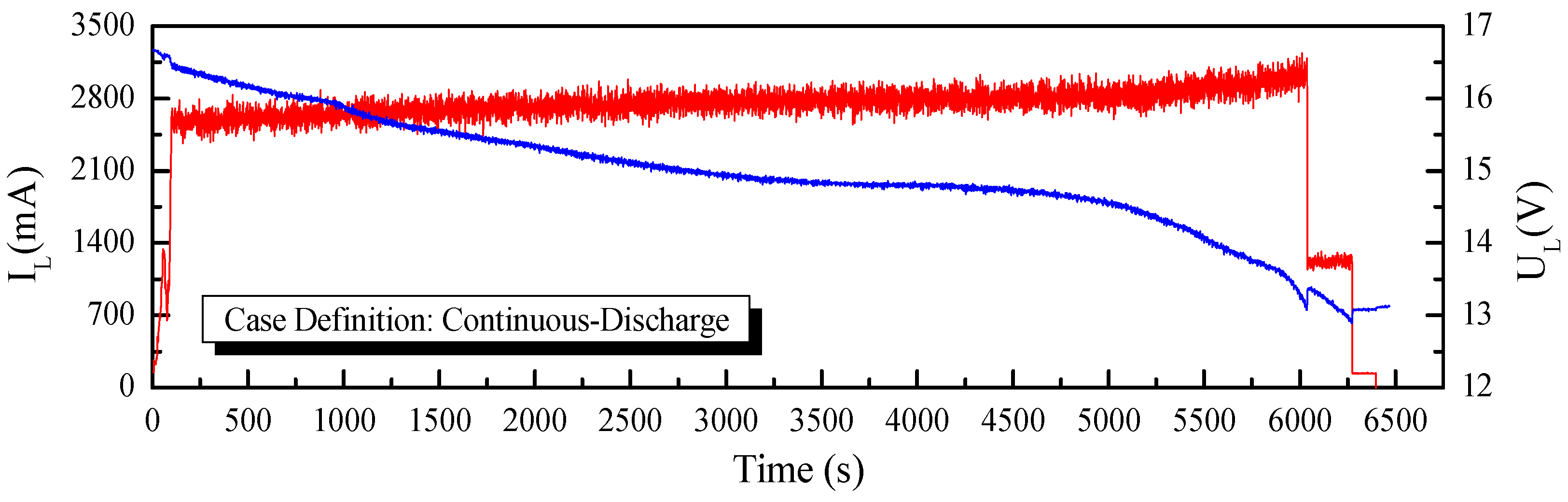
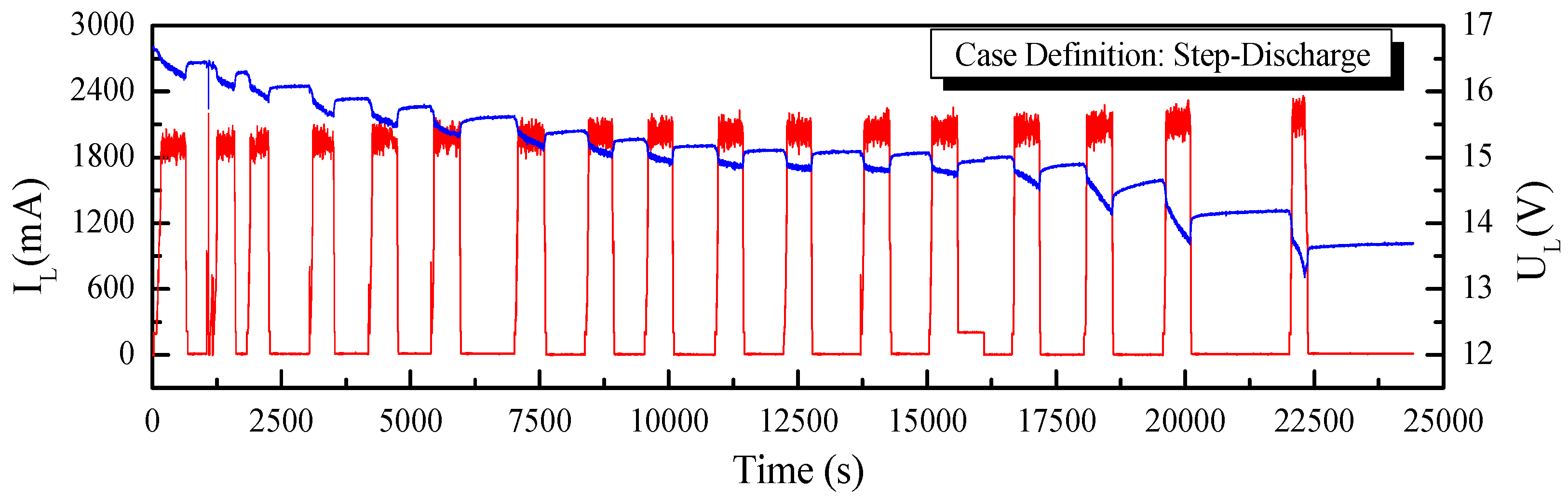
4. Experiments, Results, and Discussion
5. Conclusions
- (1)
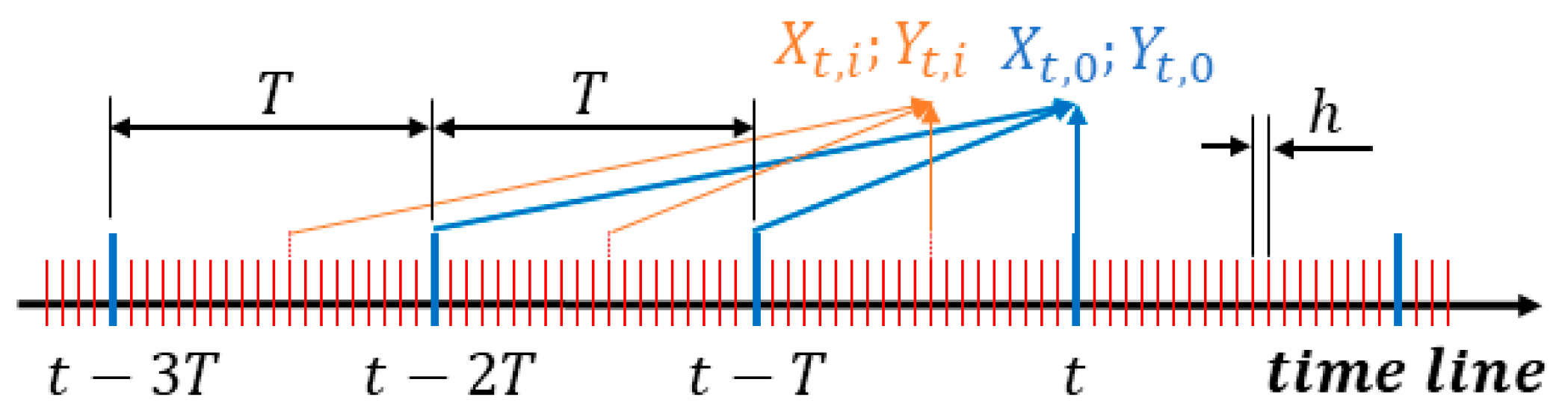
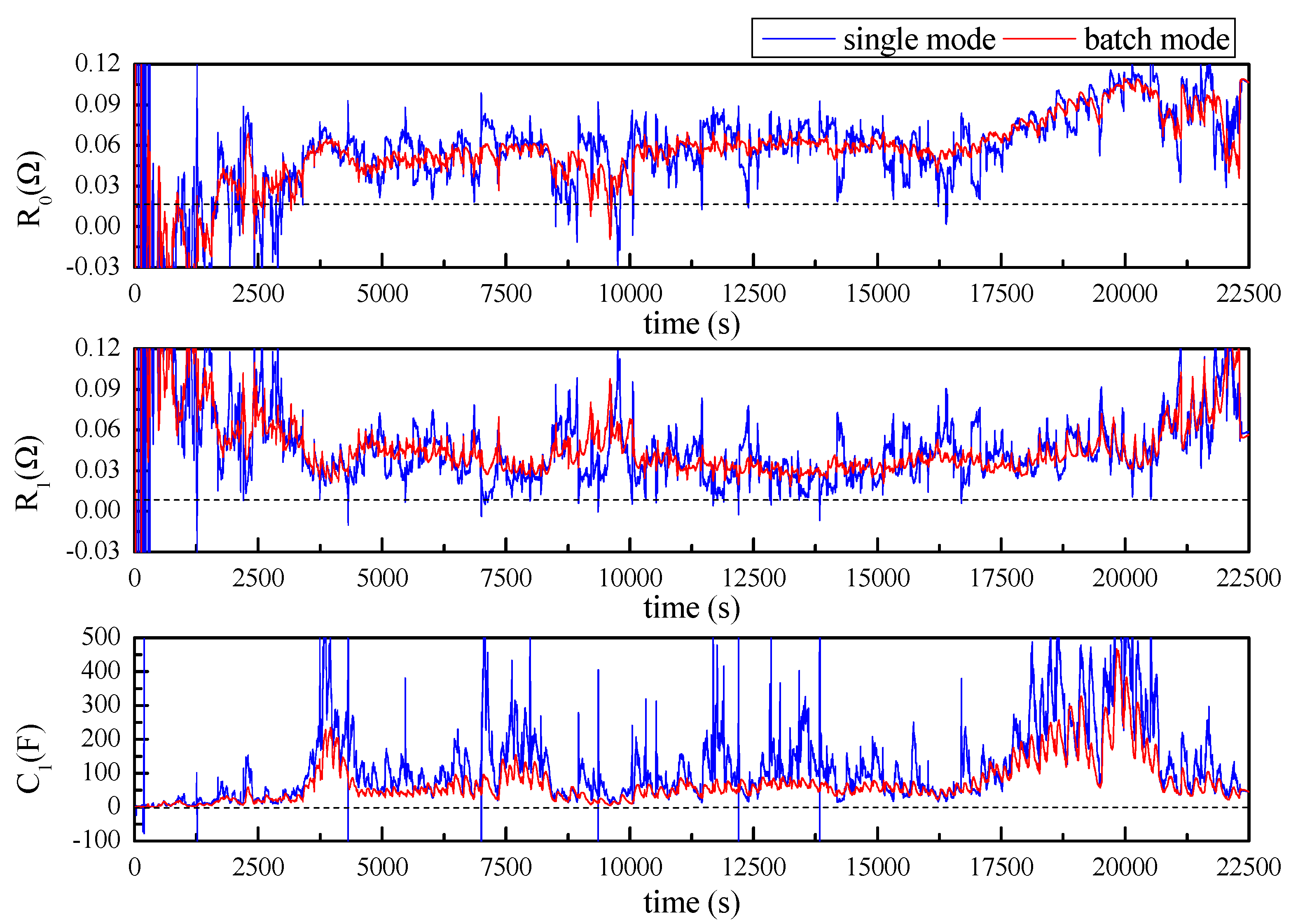
- The “batch-mode” proposed was able to make good use of all the data sampled, with a much higher frequency than the parameter-updating task, and it demonstrated a good de-noising effect in the battery-parameter estimation. Combined with the limited-memory recursive least-square algorithm, successful parameter estimation was achieved.
- (2)
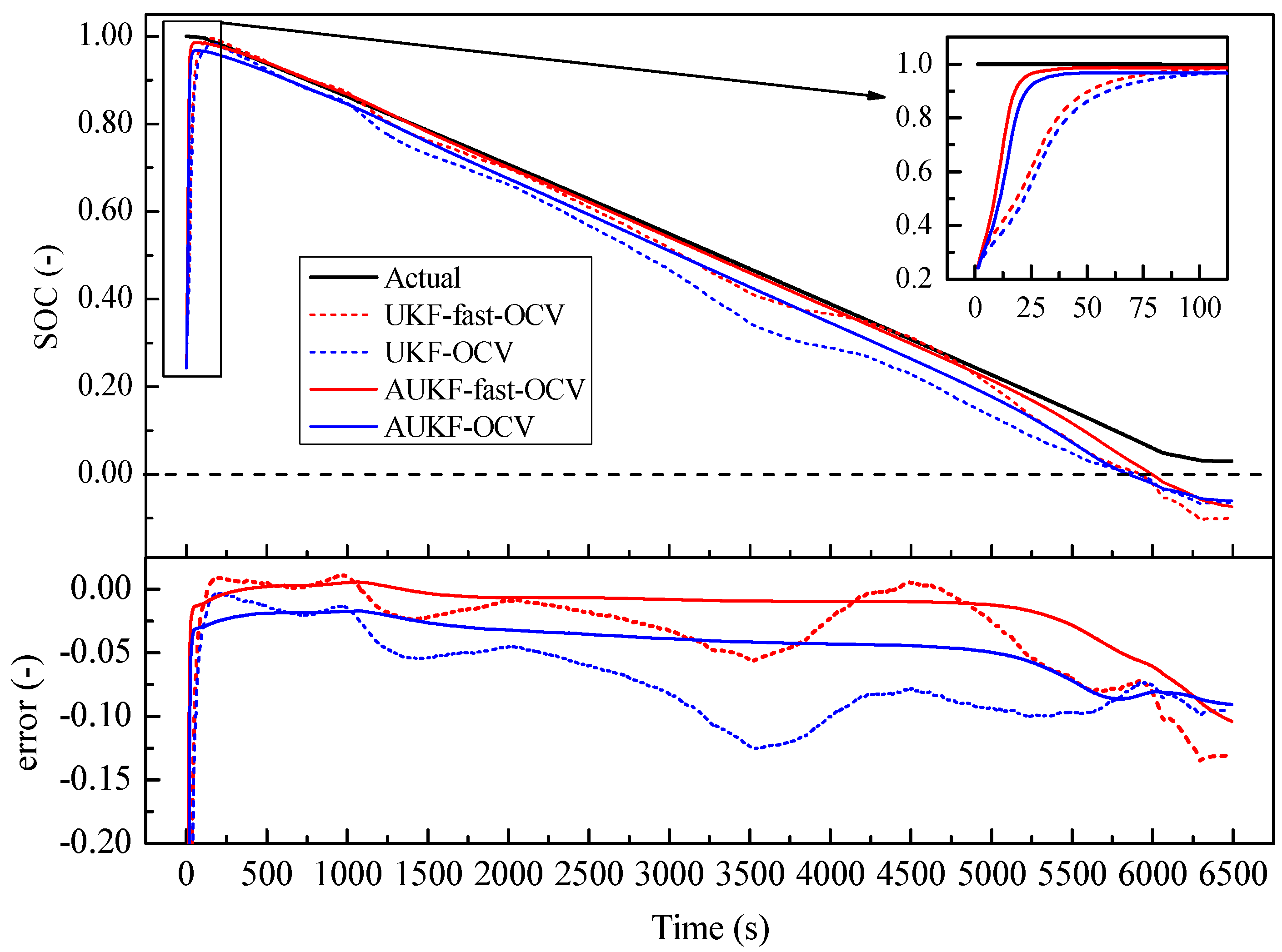
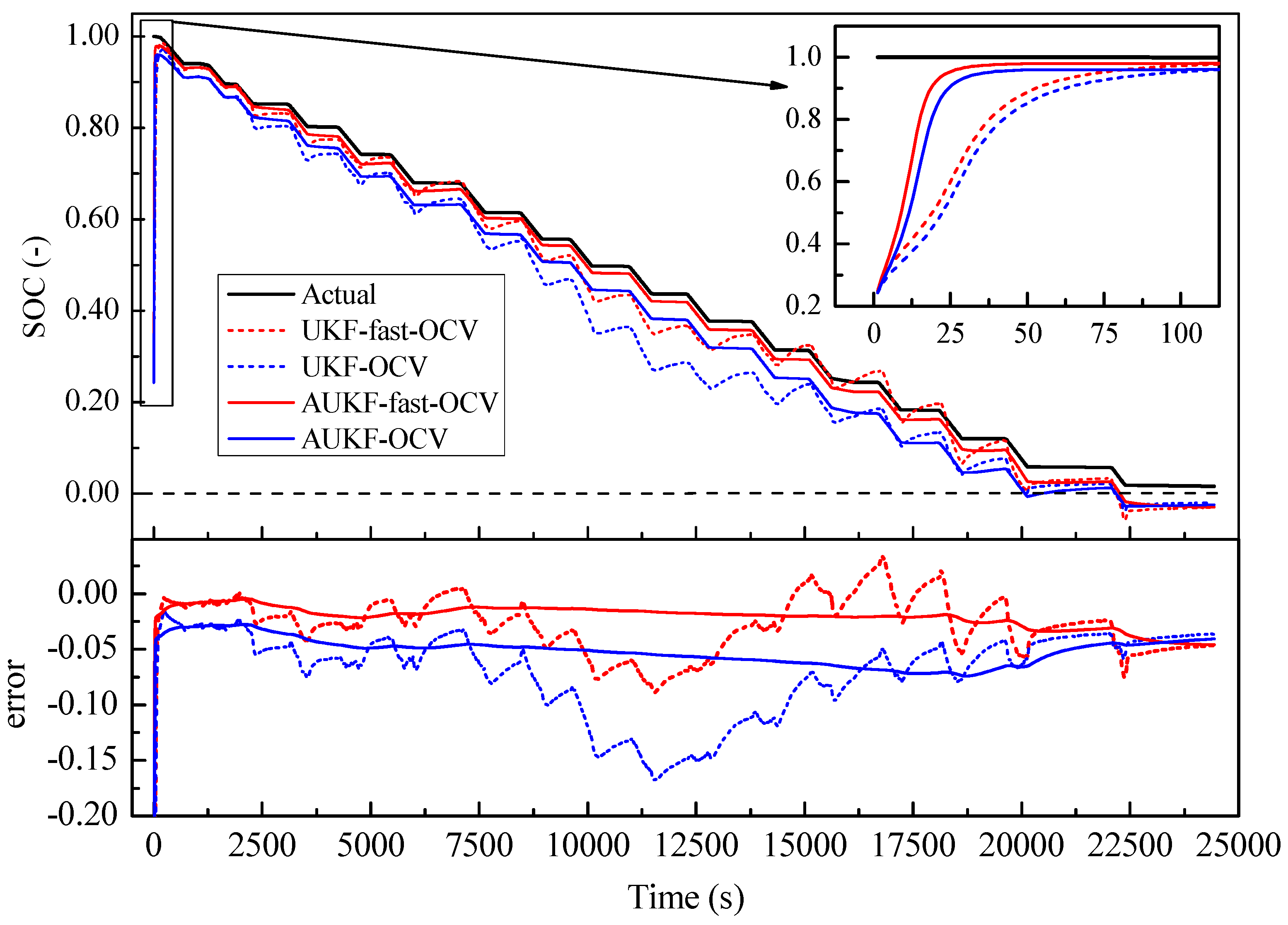
- The fast-OCV curve based on the Rint model was applied effectively for battery-SOC estimation. Compared with the traditionally obtained OCV curve, it even proved to offer much better accuracy in SOC estimation. Combined with an adaptive UKF, good accuracy in SOC estimation was achieved.
- (3)
- Compared with the traditional approach to OCV curve identification, the fast-OCV method is much more time-efficient, with a completely fluctuating charging-and-discharging process. As hybrid power for UAVs should be configured with low capacity (light batteries), the fast-OCV method is highly suitable for these situations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Adnan, N.; Nordin, S.M.; bin Bahruddin, M.A. Sustainable interdependent networks from smart autonomous vehicle to intelligent transportation networks. In Sustainable Interdependent Networks II: From Smart Power Grids to Intelligent Transportation Networks; Springer: Berlin/Heidelberg, Germany, 2019; pp. 121–134. [Google Scholar]
- Yang, T.; Jiang, Z.; Sun, R.; Cheng, N.; Feng, H. Maritime search and rescue based on group mobile computing for unmanned aerial vehicles and unmanned surface vehicles. IEEE Trans. Ind. Inform. 2020, 16, 7700–7708. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Wan, P.; Hao, B.; Li, Z.; Ma, X.; Zhao, Y. Accurate estimation the scanning cycle of the reconnaissance radar based on a single unmanned aerial vehicle. IEEE Access 2017, 5, 22871–22879. [Google Scholar] [CrossRef]
- Jaeger, M.; Adair, D. Conceptual design of a high-endurance hybrid electric unmanned aerial vehicle. Mater. Today Proc. 2017, 4, 4458–4468. [Google Scholar] [CrossRef]
- De Sutter, L.; Firouz, Y.; De Hoog, J.; Omar, N.; Van Mierlo, J. Battery aging assessment and parametric study of lithium-ion batteries by means of a fractional differential model. Electrochim. Acta 2019, 305, 24–36. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Noura, N.; Boulon, L.; Jemeï, S. A review of battery state of health estimation methods: Hybrid electric vehicle challenges. World Electr. Veh. J. 2020, 11, 66. [Google Scholar] [CrossRef]
- Rivera-Barrera, J.P.; Muñoz-Galeano, N.; Sarmiento-Maldonado, H.O. SoC estimation for lithium-ion batteries: Review and future challenges. Electronics 2017, 6, 102. [Google Scholar] [CrossRef] [Green Version]
- Partovibakhsh, M.; Liu, G. An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots. IEEE Trans. Control Syst. Technol. 2014, 23, 357–363. [Google Scholar] [CrossRef]
- How, D.N.; Hannan, M.; Lipu, M.H.; Ker, P.J. State of charge estimation for lithium-ion batteries using model-based and data-driven methods: A review. IEEE Access 2019, 7, 136116–136136. [Google Scholar] [CrossRef]
- Zhang, R.; Li, X.; Sun, C.; Yang, S.; Tian, Y.; Tian, J. State of Charge and Temperature Joint Estimation Based on Ultrasonic Reflection Waves for Lithium-Ion Battery Applications. Batteries 2023, 9, 335. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.-S.; Chen, Y.-P.; Hsieh, Y.-C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Theiler, M.; Schneider, D.; Endisch, C. Kalman Filter Tuning Using Multi-Objective Genetic Algorithm for State and Parameter Estimation of Lithium-Ion Cells. Batteries 2022, 8, 104. [Google Scholar] [CrossRef]
- Vidal, C.; Malysz, P.; Kollmeyer, P.; Emadi, A. Machine learning applied to electrified vehicle battery state of charge and state of health estimation: State-of-the-art. IEEE Access 2020, 8, 52796–52814. [Google Scholar] [CrossRef]
- Deng, Z.; Yang, L.; Cai, Y.; Deng, H. Online identification with reliability criterion and state of charge estimation based on a fuzzy adaptive extended Kalman filter for lithium-ion batteries. Energies 2016, 9, 472. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Ye, M.; Jiao, S.; Meng, W.; Xu, X. A novel state estimation approach based on adaptive unscented Kalman filter for electric vehicles. IEEE Access 2020, 8, 185629–185637. [Google Scholar] [CrossRef]
- Peng, S.; Chen, C.; Shi, H.; Yao, Z. State of charge estimation of battery energy storage systems based on adaptive unscented Kalman filter with a noise statistics estimator. IEEE Access 2017, 5, 13202–13212. [Google Scholar] [CrossRef]
- Yu, Q.-Q.; Xiong, R.; Wang, L.-Y.; Lin, C. A comparative study on open circuit voltage models for lithium-ion batteries. Chin. J. Mech. Eng. 2018, 31, 65. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Ouyang, M.; Han, X.; Lu, L.; Li, J. Investigating the error sources of the online state of charge estimation methods for lithium-ion batteries in electric vehicles. J. Power Sources 2018, 377, 161–188. [Google Scholar] [CrossRef]
- Chen, Z.; Fu, Y.; Mi, C.C. State of charge estimation of lithium-ion batteries in electric drive vehicles using extended Kalman filtering. IEEE Trans. Veh. Technol. 2012, 62, 1020–1030. [Google Scholar] [CrossRef]
- Weng, C.; Sun, J.; Peng, H. A unified open-circuit-voltage model of lithium-ion batteries for state-of-charge estimation and state-of-health monitoring. J. Power Sources 2014, 258, 228–237. [Google Scholar] [CrossRef]
- Lin, C.; Yu, Q.; Xiong, R. A study on the impact of open circuit voltage tests on state of charge estimation for lithium-ion batteries. Appl. Energy 2017, 205, 892–902. [Google Scholar] [CrossRef]
- Campestrini, C.; Kosch, S.; Jossen, A. Influence of change in open circuit voltage on the state of charge estimation with an extended Kalman filter. J. Energy Storage 2017, 12, 149–156. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. A study on the dependency of the open-circuit voltage on temperature and actual aging state of lithium-ion batteries. J. Power Sources 2017, 347, 1–13. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, X. A novel non-experiment-based reconstruction method for the relationship between open-circuit-voltage and state-of-charge/state-of-energy of lithium-ion battery. Electrochim. Acta 2022, 403, 139637. [Google Scholar] [CrossRef]
- Fan, K.; Wan, Y.; Wang, Z.; Jiang, K. Time-efficient identification of lithium-ion battery temperature-dependent OCV-SOC curve using multi-output Gaussian process. Energy 2023, 268, 126724. [Google Scholar] [CrossRef]
- Cui, Z.; Cui, N.; Li, C.; Lu, J.; Zhang, C. Online Identification and Reconstruction of Open-Circuit Voltage for Capacity and Electrode Aging Estimation of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2023, 70, 4716–4726. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W.; Sun, F. Electrode ageing estimation and open circuit voltage reconstruction for lithium ion batteries. Energy Storage Mater. 2021, 37, 283–295. [Google Scholar] [CrossRef]
- Xu, X.; Xu, Z.; Wang, T.; Xu, J.; Pei, L. Open-circuit voltage curve reconstruction for degrading lithium-ion batteries utilizing discrete curve fragments from an online dataset. J. Energy Storage 2022, 56, 106003. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, Y.; Xiong, Y.; Yan, Q. Estimation of battery open-circuit voltage and state of charge based on dynamic matrix control-extended Kalman filter algorithm. J. Energy Storage 2022, 52, 104860. [Google Scholar] [CrossRef]
- Chen, X.; Lei, H.; Xiong, R.; Shen, W.; Yang, R. A novel approach to reconstruct open circuit voltage for state of charge estimation of lithium ion batteries in electric vehicles. Appl. Energy 2019, 255, 113758. [Google Scholar] [CrossRef]
- Yang, X.; Pei, X. Hybrid system for powering unmanned aerial vehicles: Demonstration and study cases. In Hybrid Technologies for Power Generation; Elsevier: Amsterdam, The Netherlands, 2022; pp. 439–473. [Google Scholar]
- Ye, X.; Savvarisal, A.; Tsourdos, A.; Zhang, D.; Jason, G. Review of hybrid electric powered aircraft, its conceptual design and energy management methodologies. Chin. J. Aeronaut. 2021, 34, 432–450. [Google Scholar]
- Pan, Z.; An, L.; Wen, C. Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles. Appl. Energy 2019, 240, 473–485. [Google Scholar] [CrossRef]
- Li, S.; Gu, C.; Zhao, P.; Cheng, S. A novel hybrid propulsion system configuration and power distribution strategy for light electric aircraft. Energy Convers. Manag. 2021, 238, 114171. [Google Scholar] [CrossRef]
- Xie, Y.; Savvaris, A.; Tsourdos, A. Fuzzy logic based equivalent consumption optimization of a hybrid electric propulsion system for unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 85, 13–23. [Google Scholar] [CrossRef] [Green Version]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Yu, M.; Lan, D.; Huang, Y.; Wang, H.; Jiang, C.; Zhao, L. Event-based sequential prognosis for uncertain hybrid systems with intermittent faults. IEEE Trans. Ind. Inform. 2018, 15, 4455–4468. [Google Scholar] [CrossRef]
- Yi, S.; Zorzi, M. Robust kalman filtering under model uncertainty: The case of degenerate densities. IEEE Trans. Autom. Control 2021, 67, 3458–3471. [Google Scholar] [CrossRef]
- He, H.; Qin, H.; Sun, X.; Shui, Y. Comparison study on the battery SoC estimation with EKF and UKF algorithms. Energies 2013, 6, 5088–5100. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Wu, J.; Kang, G. SOC Estimation of Lithium Battery by UKF Algorithm Based on Dynamic Parameter Model. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; IEEE: Manhattan, NY, USA, 2016; pp. 945–950. [Google Scholar]
- Huang, C.; Yu, X.; Wang, Y.; Zhou, Y.; Li, R. State of charge estimation of li-ion batteries based on the noise-adaptive interacting multiple model. Energy Rep. 2021, 7, 8152–8161. [Google Scholar] [CrossRef]
- He, Z.; Li, Y.; Sun, Y.; Zhao, S.; Lin, C.; Pan, C.; Wang, L. State-of-charge estimation of lithium ion batteries based on adaptive iterative extended Kalman filter. J. Energy Storage 2021, 39, 102593. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ) | ) | ) | ) |
|---|---|---|---|
| 50 A | 0~±100 A | 1:2000 | ±12~15 V |
| ) | ||||
|---|---|---|---|---|
| Power Voltage | @TA = 70 °C | @TA = 85 °C | ||
| Min | Max | Min | Max | |
| with ±12 V | 0 Ω | 215 Ω | 0 Ω | 210 Ω |
| 0 Ω | 35 Ω | 0 Ω | 30 Ω | |
| with ±15 V | 0 Ω | 335 Ω | 30 Ω | 330 Ω |
| 0 Ω | 95 Ω | 30 Ω | 90 Ω | |
| Linearity Error | (1) | ||||
|---|---|---|---|---|---|
| @±15 V (±5%) | @±12~15 V (±5%) | <0.15% | within ±0.10 mA | <500 ns | <1 μs |
| ±0.65% | ±0.90% | ||||
| Coefficient | Value | Coefficient | Value | Coefficient | Value |
|---|---|---|---|---|---|
| 0.18178 | −0.92811 | 3.6568 | |||
| −6.8357 | 5.9269 | −1.7057 | |||
| −0.22173 | 13.951 | 8.3961 | |||
| −18.459 | −4.6272 | 69.866 | |||
| −82.283 | 29.877 | ||||
| Battery information: Lipo, 4S1P, 14.8V,45C | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Martín Gómez, D.; de la Escalera Hueso, A.; Flores Peña, P.; Lu, X.; Armingol Moreno, J.M. Battery-SOC Estimation for Hybrid-Power UAVs Using Fast-OCV Curve with Unscented Kalman Filters. Sensors 2023, 23, 6429. https://doi.org/10.3390/s23146429
He Z, Martín Gómez D, de la Escalera Hueso A, Flores Peña P, Lu X, Armingol Moreno JM. Battery-SOC Estimation for Hybrid-Power UAVs Using Fast-OCV Curve with Unscented Kalman Filters. Sensors. 2023; 23(14):6429. https://doi.org/10.3390/s23146429
Chicago/Turabian StyleHe, Zhuoyao, David Martín Gómez, Arturo de la Escalera Hueso, Pablo Flores Peña, Xingcai Lu, and José María Armingol Moreno. 2023. "Battery-SOC Estimation for Hybrid-Power UAVs Using Fast-OCV Curve with Unscented Kalman Filters" Sensors 23, no. 14: 6429. https://doi.org/10.3390/s23146429