

Intelligent Drone Positioning via BIC Optimization for Maximizing LPWAN Coverage and Capacity in Suburban Amazon Environments
 , ,
, ,
Abstract
:1. Introduction
2. Related Works
Contributions
3. Methodology
3.1. Classical Propagation Model for UAV Base Stations
Empirical Propagation Models for LoRa in Forested Environments
3.2. Bioinspired Computing Algorithms
3.2.1. Cuckoo Search
- Each cuckoo lays one egg at a time, to be deposited in a random nest. Every egg is to be considered a unique solution to the problem;
- The best solutions (eggs) will be carried over through the next iterations, in accordance with the parasitic and survivalist nature of the cuckoo chicks;
- The number of available nests per iteration is fixed by the developer of the code. The probability of a cuckoo egg being discovered by the host bird is defined as . Then, a discard probability will define if the host bird will get rid of a cuckoo nest or let it hatch.
3.2.2. Flower Pollination Algorithm
- Both biotic and cross-pollination are considered a global pollination process, and are performed by pollinators carrying pollen and executing Lévy flights;
- In contrast, abiotic and self-pollination are considered as local pollination;
- Flower constancy is then taken as a measure of the probability of reproduction, which is directly proportional to the similarity between two flowers involved in the pollination process;
- To control both local and global pollination activities, a switch probability p with values from 0 to 1 is utilized. Local pollination can make up a significant fraction p in the overall pollination process due to physical proximity and other environmental factors such as wind.
3.2.3. Genetic Algorithm
3.3. Drone Positioning Simulations and Optimization Metrics
4. Results
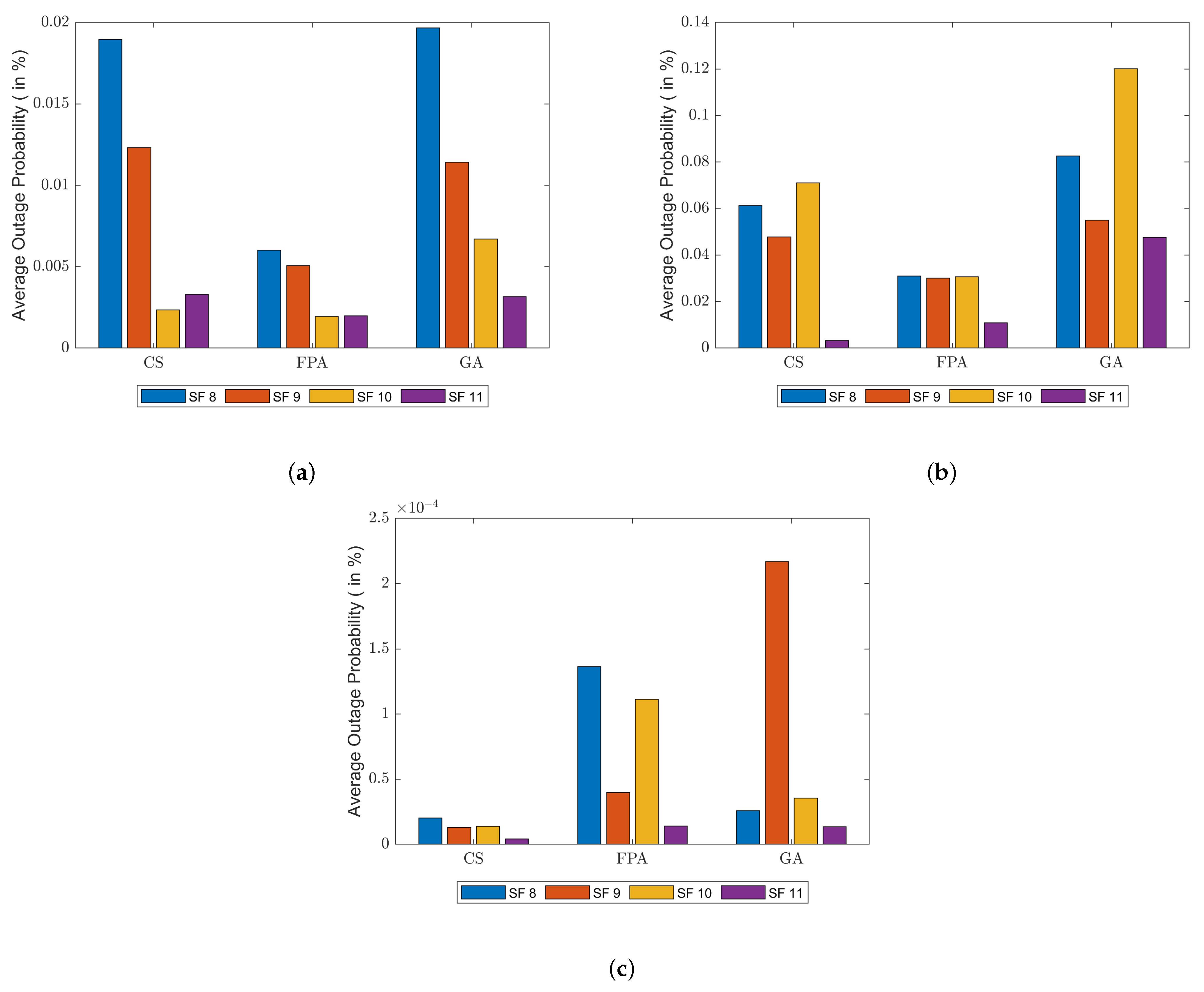
4.1. Fitness and Outage Probability
4.2. Spectral Efficiency and Cell Radius
4.3. Sine Contour Plots
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Borges, L.M.; Velez, F.J.; Lebres, A.S. Survey on the characterization and classification of wireless sensor network applications. IEEE Commun. Surv. Tutor. 2014, 16, 1860–1890. [Google Scholar] [CrossRef]
- Lavric, A.; Popa, V. Internet of things and LoRa™ low-power wide-area networks: A survey. In Proceedings of the 2017 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 13–14 July 2017; pp. 1–5. [Google Scholar]
- Caruso, A.; Chessa, S.; Escolar, S.; Barba, J.; López, J.C. Collection of Data with Drones in Precision Agriculture: Analytical Model and LoRa Case Study. IEEE Internet Things J. 2021, 8, 16692–16704. [Google Scholar] [CrossRef]
- Ghazali, M.H.M.; Teoh, K.; Rahiman, W. A Systematic Review of Real-Time Deployments of UAV-Based LoRa Communication Network. IEEE Access 2021, 9, 124817–124830. [Google Scholar] [CrossRef]
- Dave, M.; Patel, R.; Joshi, I.; Goradiya, B. Versatile Multipurpose Crashproof UAV: Machine Learning and IoT approach. In Proceedings of the 2020 International Conference for Emerging Technology (INCET), Belgaum, India, 5–7 June 2020; pp. 1–7. [Google Scholar]
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned aerial vehicle based wireless sensor network for marine-coastal environment monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef]
- Zorbas, D.; O’Flynn, B. A network architecture for high volume data collection in agricultural applications. In Proceedings of the 2019 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini, Greece, 29–31 May 2019; pp. 578–583. [Google Scholar]
- Al-Turjman, F.; Lemayian, J.P.; Alturjman, S.; Mostarda, L. Enhanced deployment strategy for the 5G drone-BS using artificial intelligence. IEEE Access 2019, 7, 75999–76008. [Google Scholar] [CrossRef]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the number and 3D placement of drone base stations in wireless cellular networks. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Yuheng, Z.; Liyan, Z.; Chunpeng, L. 3-d deployment optimization of uavs based on particle swarm algorithm. In Proceedings of the 2019 IEEE 19th International Conference on Communication Technology (ICCT), Xi’an, China, 16–19 October 2019; pp. 954–957. [Google Scholar]
- Aggarwal, K.; Goyal, A. Particle Swarm Optimization based UAV for Disaster management. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 1235–1238. [Google Scholar]
- Zhicai, R.; Jiang, B.; Hong, X. A Cooperative Search Algorithm Based on Improved Particle Swarm Optimization Decision for UAV Swarm. In Proceedings of the 2021 IEEE 6th International Conference on Computer and Communication Systems (ICCCS), Chengdu, China, 23–26 April 2021; pp. 140–145. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone small cells in the clouds: Design, deployment and performance analysis. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Mozaffari, M.; Saad, W.; Yin, C.; Debbah, M.; Hong, C.S. Caching in the sky: Proactive deployment of cache-enabled unmanned aerial vehicles for optimized quality-of-experience. IEEE J. Sel. Areas Commun. 2017, 35, 1046–1061. [Google Scholar] [CrossRef]
- Ruan, L.; Wang, J.; Chen, J.; Xu, Y.; Yang, Y.; Jiang, H.; Zhang, Y.; Xu, Y. Energy-efficient multi-UAV coverage deployment in UAV networks: A game-theoretic framework. China Commun. 2018, 15, 194–209. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Wireless communication using unmanned aerial vehicles (UAVs): Optimal transport theory for hover time optimization. IEEE Trans. Wirel. Commun. 2017, 16, 8052–8066. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Cardoso, E.H.S.; De Araújo, J.P.L.; De Carvalho, S.V.; Vijaykumar, N.; Francês, C.R.L. Novel multilayered cellular automata for flying cells positioning on 5g cellular self-organising networks. IEEE Access 2020, 8, 227076–227099. [Google Scholar] [CrossRef]
- Semtech. LoRa Modulation Basics; Report AN1200.22; Semtech Corporation: Camarillo, CA, USA, 2015. [Google Scholar]
- Semtech. LoRa and LoRaWAN: A Technical Overview; Technical Report; Semtech Corporation: Camarillo, CA, USA, 2019. [Google Scholar]
- Andersen, J.B.; Rappaport, T.S.; Yoshida, S. Propagation measurements and models for wireless communications channels. IEEE Commun. Mag. 1995, 33, 42–49. [Google Scholar] [CrossRef] [Green Version]
- El Chall, R.; Lahoud, S.; El Helou, M. LoRaWAN network: Radio propagation models and performance evaluation in various environments in Lebanon. IEEE Internet Things J. 2019, 6, 2366–2378. [Google Scholar] [CrossRef]
- Alsayyari, A.; Kostanic, I.; Otero, C.E.; Aldosary, A. An empirical path loss model for wireless sensor network deployment in a dense tree environment. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar]
- Robles-Enciso, R.; Morales-Aragón, I.P.; Serna-Sabater, A.; Martínez-Inglés, M.T.; Mateo-Aroca, A.; Molina-Garcia-Pardo, J.M.; Juan-Llácer, L. LoRa, Zigbee and 5G Propagation and Transmission Performance in an Indoor Environment at 868 MHz. Sensors 2023, 23, 3283. [Google Scholar] [CrossRef]
- Onykiienko, Y.; Popovych, P.; Yaroshenko, R.; Mitsukova, A.; Beldyagina, A.; Makarenko, Y. Using RSSI Data for LoRa Network Path Loss Modeling. In Proceedings of the 2022 IEEE 41st International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 10–14 October 2022; pp. 576–580. [Google Scholar]
- Del Ser, J.; Osaba, E.; Molina, D.; Yang, X.S.; Salcedo-Sanz, S.; Camacho, D.; Das, S.; Suganthan, P.N.; Coello, C.A.C.; Herrera, F. Bio-inspired computation: Where we stand and what’s next. Swarm Evol. Comput. 2019, 48, 220–250. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-inspired optimization algorithms: Challenges and open problems. J. Comput. Sci. 2020, 46, 101104. [Google Scholar] [CrossRef] [Green Version]
- Dao, S.D.; Abhary, K.; Marian, R. A bibliometric analysis of Genetic Algorithms throughout the history. Comput. Ind. Eng. 2017, 110, 395–403. [Google Scholar] [CrossRef]
- Shehab, M.; Khader, A.T.; Al-Betar, M.A. A survey on applications and variants of the cuckoo search algorithm. Appl. Soft Comput. 2017, 61, 1041–1059. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Ferreira, F.H. Intelligent Positioning of Drones via Metaheuristic Optimization Algorithms for Maximizing Signal Coverage Area in Forested Environments. Masters’ Thesis, Federal University of Pará (UFPA), Belém, Pará, Brazil, 2022. [Google Scholar]
- Yang, X.S. Flower pollination algorithm for global optimization. In International Conference on Unconventional Computing and Natural Computation; Springer: Berlin/Heidelberg, Germany, 2012; pp. 240–249. [Google Scholar]
- Yang, X.S.; Karamanoglu, M.; He, X. Flower pollination algorithm: A novel approach for multiobjective optimization. Eng. Optim. 2014, 46, 1222–1237. [Google Scholar] [CrossRef] [Green Version]
- Alam, T.; Qamar, S.; Dixit, A.; Benaida, M. Genetic algorithm: Reviews, implementations, and applications. arXiv 2020, arXiv:2007.12673. [Google Scholar] [CrossRef]
- Khadir, K.; Guermouche, N.; Guittoum, A.; Monteil, T. A genetic algorithm-based approach for fluctuating QoS aware selection of IoT services. IEEE Access 2022, 10, 17946–17965. [Google Scholar] [CrossRef]
- Roy, S.K.; De, D. Genetic algorithm based internet of precision agricultural things (IoPAT) for agriculture 4.0. Internet Things 2022, 18, 100201. [Google Scholar] [CrossRef]
- Mirjalili, S.; Song Dong, J.; Sadiq, A.S.; Faris, H. Genetic algorithm: Theory, literature review, and application in image reconstruction. Nature-Inspired Optimizers: Theories, Literature Reviews and Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 69–85. [Google Scholar]
- Harik, G.R.; Lobo, F.G.; Goldberg, D.E. The compact genetic algorithm. IEEE Trans. Evol. Comput. 1999, 3, 287–297. [Google Scholar] [CrossRef] [Green Version]
- Lauridsen, M.; Nguyen, H.; Vejlgaard, B.; Kovács, I.Z.; Mogensen, P.; Sorensen, M. Coverage comparison of GPRS, NB-IoT, LoRa, and SigFox in a 7800 km2 area. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Vejlgaard, B.; Lauridsen, M.; Nguyen, H.; Kovács, I.Z.; Mogensen, P.; Sorensen, M. Interference impact on coverage and capacity for low power wide area IoT networks. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Rappaport, T.S. Wireless Communications–Principles and Practice, (The Book End). Microw. J. 2002, 45, 128–129. [Google Scholar]
- Wang, W.; Capitaneanu, S.L.; Marinca, D.; Lohan, E.S. Comparative analysis of channel models for industrial IoT wireless communication. IEEE Access 2019, 7, 91627–91640. [Google Scholar] [CrossRef]
- Tu, L.T.; Bradai, A.; Pousset, Y. Coverage Probability and Spectral Efficiency Analysis of Multi-Gateway Downlink LoRa Networks. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 1–6. [Google Scholar]
- Semtech. SX1272/73—860 MHz to 1020 MHz Low Power Long Range Transceiver; Datasheet SX1272/73; Semtech Corporation: Camarillo, CA, USA, 2019. [Google Scholar]
- Semtech. LoRa Core™ PicoCell Gateway, SX1308, 915 MHz; Web Page SX1308; Semtech Corporation: Camarillo, CA, USA, 2022. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Multiple UAVs? | LoRa-Related? | Channel Modeling? | Environment | Optimization Method |
|---|---|---|---|---|---|
| [3] | – | X | – | Rural | – |
| [5] | – | X | – | Rural, Suburban | Machine Learning |
| [6] | – | X | – | Coastal | – |
| [7] | – | X | – | Rural | – |
| [8] | X | – | – | Urban | GA, SA |
| [9] | X | – | – | Urban | PSO |
| [10] | X | – | – | Urban | PSO |
| [11] | X | – | – | Urban | PSO |
| [12] | X | – | – | Urban | PSO, Bayesian |
| [13] (Survey) | X | – | X | Several | Several |
| [14] (Survey) | X | – | – | Several | Several |
| This Study | X | X | X | Suburban, Forested | CS, FPA, GA |
| Mode | Bit Rate (kbps) | Sensitivity (dBm) | (dB) | Estimated Value |
|---|---|---|---|---|
| FSK | 1.2 | −122 | – | N/A |
| SF 12 | 0.293 | −137 | +15 | 10–12 km |
| SF 11 | 0.537 | −134.5 | +12.5 | 10 km |
| SF 10 | 0.976 | −132 | +10 | 8 km |
| SF 9 | 1.757 | −129 | +7 | 6 km |
| SF 8 | 3.125 | −126 | +4 | 4 km |
| SF 7 | 5.468 | −123 | +1 | 2 km |
| SF 6 | 9.375 | −118 | −3 | N/A |
| Mode | PLE (n) | |
|---|---|---|
| SF 11 (h = 6 m) | 4.93 | 9.43 |
| SF 11 (h = 24 m) | 4.15 | 7.95 |
| SF 11 (h = 42 m) | 3.92 | 7.24 |
| SF 11 (h = 60 m) | 3.89 | 6.74 |
| SF 10 (h = 6 m) | 4.92 | 9.93 |
| SF 10 (h = 24 m) | 4.29 | 7.89 |
| SF 10 (h = 42 m) | 3.97 | 7.06 |
| SF 10 (h = 60 m) | 3.89 | 6.47 |
| SF 9 (h = 6 m) | 4.98 | 9.26 |
| SF 9 (h = 24 m) | 4.30 | 6.64 |
| SF 9 (h = 42 m) | 4.04 | 7.15 |
| SF 9 (h = 60 m) | 3.92 | 5.82 |
| SF 8 (h = 6 m) | 4.85 | 9.05 |
| SF 8 (h = 24 m) | 4.06 | 8.61 |
| SF 8 (h = 42 m) | 3.85 | 7.58 |
| SF 8 (h = 60 m) | 3.62 | 6.72 |
| Mode | PLE (n) | |
|---|---|---|
| SF 11 (h = 6 m) | 3.17 | 9.34 |
| SF 11 (h = 24 m) | 2.76 | 9.43 |
| SF 11 (h = 42 m) | 2.63 | 7.89 |
| SF 11 (h = 60 m) | 2.61 | 7.35 |
| SF 10 (h = 6 m) | 3.15 | 10.12 |
| SF 10 (h = 24 m) | 2.82 | 8.53 |
| SF 10 (h = 42 m) | 2.66 | 7.72 |
| SF 10 (h = 60 m) | 2.63 | 7.41 |
| SF 9 (h = 6 m) | 3.17 | 9.21 |
| SF 9 (h = 24 m) | 2.82 | 6.91 |
| SF 9 (h = 42 m) | 2.68 | 7.14 |
| SF 9 (h = 60 m) | 2.61 | 6.20 |
| SF 8 (h = 6 m) | 3.07 | 9.03 |
| SF 8 (h = 24 m) | 2.69 | 8.68 |
| SF 8 (h = 42 m) | 2.59 | 8.03 |
| SF 8 (h = 60 m) | 2.43 | 7.06 |
| Parameters | Values |
|---|---|
| Lower bounds (x, y and h) | [0; 0] m |
| Upper bounds (x, y and h) | [8000; 8000] m |
| Height bounds (h) | [6, 24, 42, 60] m |
| Lower and Upper bounds (UAV) | 1 to 10 UAVs |
| Number of iterations (All BIC) | 2000 |
| Solutions per iterations (All BIC) | 25 |
| 50 | |
| 10 | |
| Nest Discard Probability (CS) | 0.25 |
| Switch Probability (FPA) | 0.3 |
| Crossover Rate (GA) | 0.6 |
| Mutation Rate (GA) | 0.1 |
| Elitism Rate (GA) | 0.1 |
| Transmitted Frequency | 915 MHz |
| Bandwidth | 125 kHz |
| 9.6 | |
| 0.28 | |
| 1 dB | |
| 20 dB | |
| and | 0 dB |
| Transmitted Power (all UAVs) | 14 dBm |
| SF | Algorithm | Best Fitness | UAVs | Run Time (s) |
|---|---|---|---|---|
| CS (Classical) | 0.6046 | 7 | 185 | |
| CS (Classical) | 0.6000 | 7 | 201 | |
| CS (Classical) | 0.5586 | 7 | 203 | |
| CS (Classical) | 0.5501 | 7 | 197 | |
| FPA (Classical) | 0.6049 | 7 | 110 | |
| FPA (Classical) | 0.5544 | 7 | 91 | |
| FPA (Classical) | 0.5558 | 7 | 94 | |
| FPA (Classical) | 0.5538 | 7 | 96 | |
| GA (Classical) | 0.7896 | 8 | 28 | |
| GA (Classical) | 0.9001 | 9 | 30 | |
| GA (Classical) | 0.7004 | 8 | 29 | |
| GA (Classical) | 0.8000 | 9 | 27 | |
| CS (LDPL) | 1.7823 | 10 | 145 | |
| CS (LDPL) | 2.4969 | 10 | 144 | |
| CS (LDPL) | 1.5741 | 10 | 145 | |
| CS (LDPL) | 1.2437 | 10 | 168 | |
| FPA (LDPL) | 1.8464 | 10 | 60 | |
| FPA (LDPL) | 3.1950 | 10 | 88 | |
| FPA (LDPL) | 1.9204 | 10 | 81 | |
| FPA (LDPL) | 1.2815 | 10 | 84 | |
| GA (LDPL) | 4.4031 | 10 | 27 | |
| GA (LDPL) | 6.4865 | 10 | 29 | |
| GA (LDPL) | 4.0611 | 10 | 27 | |
| GA (LDPL) | 2.4539 | 10 | 26 | |
| CS (CI) | 0.6002 | 7 | 159 | |
| CS (CI) | 0.6002 | 7 | 163 | |
| CS (CI) | 0.5534 | 7 | 167 | |
| CS (CI) | 0.5504 | 7 | 164 | |
| FPA (CI) | 0.5649 | 7 | 75 | |
| FPA (CI) | 0.5553 | 7 | 68 | |
| FPA (CI) | 0.5766 | 7 | 72 | |
| FPA (CI) | 0.5555 | 7 | 71 | |
| GA (CI) | 0.8966 | 10 | 28 | |
| GA (CI) | 0.5758 | 7 | 27 | |
| GA (CI) | 0.9011 | 10 | 26 | |
| GA (CI) | 0.7567 | 9 | 29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferreira, F.H.C.d.S.; Neto, M.C.d.A.; Barros, F.J.B.; Araújo, J.P.L.d. Intelligent Drone Positioning via BIC Optimization for Maximizing LPWAN Coverage and Capacity in Suburban Amazon Environments. Sensors 2023, 23, 6231. https://doi.org/10.3390/s23136231
Ferreira FHCdS, Neto MCdA, Barros FJB, Araújo JPLd. Intelligent Drone Positioning via BIC Optimization for Maximizing LPWAN Coverage and Capacity in Suburban Amazon Environments. Sensors. 2023; 23(13):6231. https://doi.org/10.3390/s23136231
Chicago/Turabian StyleFerreira, Flávio Henry Cunha da Silva, Miércio Cardoso de Alcântara Neto, Fabrício José Brito Barros, and Jasmine Priscyla Leite de Araújo. 2023. "Intelligent Drone Positioning via BIC Optimization for Maximizing LPWAN Coverage and Capacity in Suburban Amazon Environments" Sensors 23, no. 13: 6231. https://doi.org/10.3390/s23136231