

Real-Time Detection of Intruders Using an Acoustic Sensor and Internet-of-Things Computing
 , , , and
, , , and
Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Reference | Limitation |
|---|---|---|
| Video | [4,5] | Requires several sensors to cover different areas that are nearby and apart Needs light to work Infrared camera is quite expensive Poses a threat in the sense of violating the privacy of a place |
| Motion | [6,7] | Blind spots Range limitations |
| Magnetic contact | [7] | Do not detect motion or other types of intrusions |
| Radar | [8] | Not recommended for indoor intruder detection Works properly only in the line-of-site transmission |
| Pulsed light | [9,11] | Quite high cost Not suitable for indoor applications |
| Vibration | [12] | Not suitable for indoor applications |
| Acoustic | [9,13,14,15] | Affected by environmental noise |
2. System Development
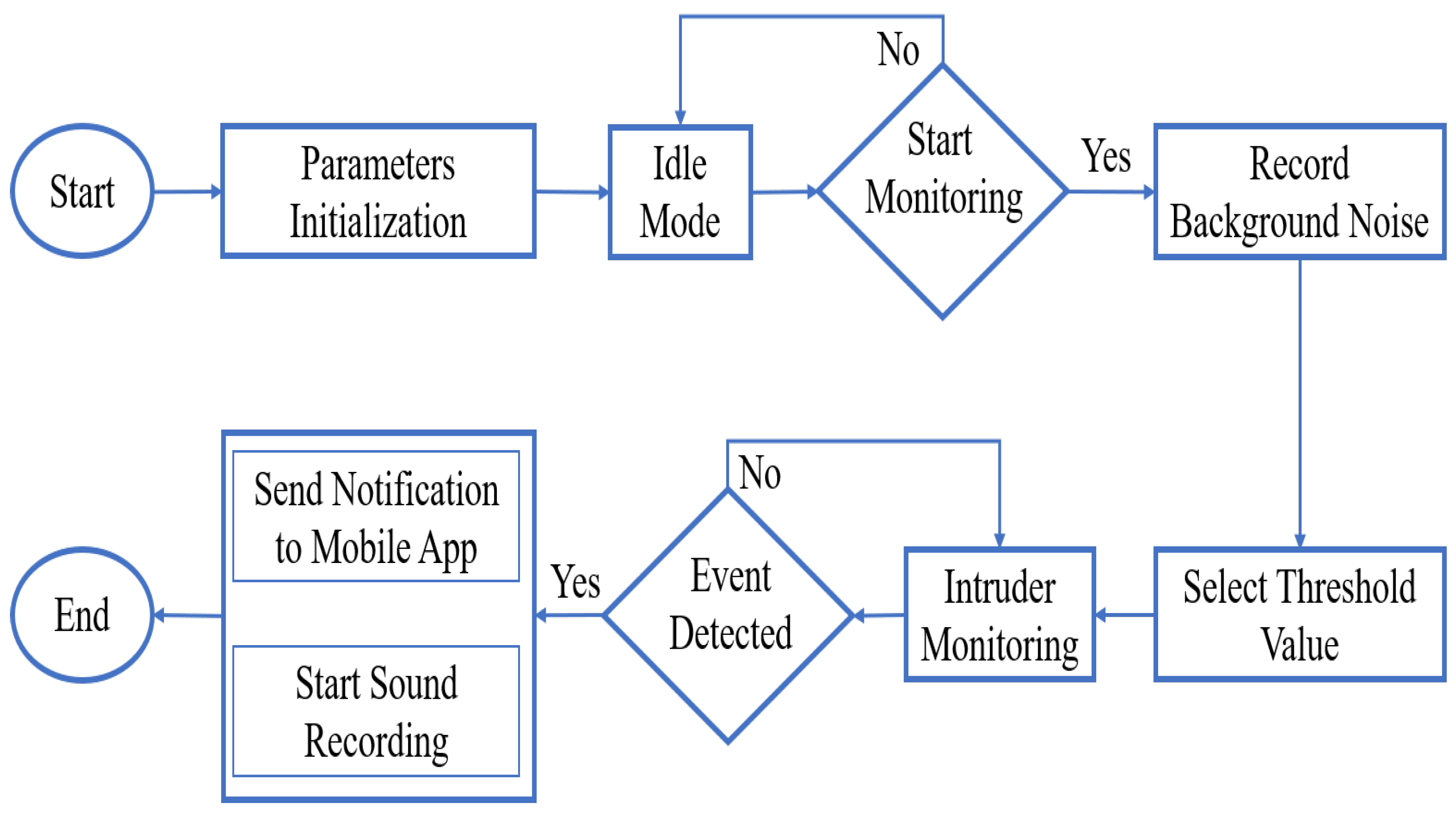
2.1. System Concept
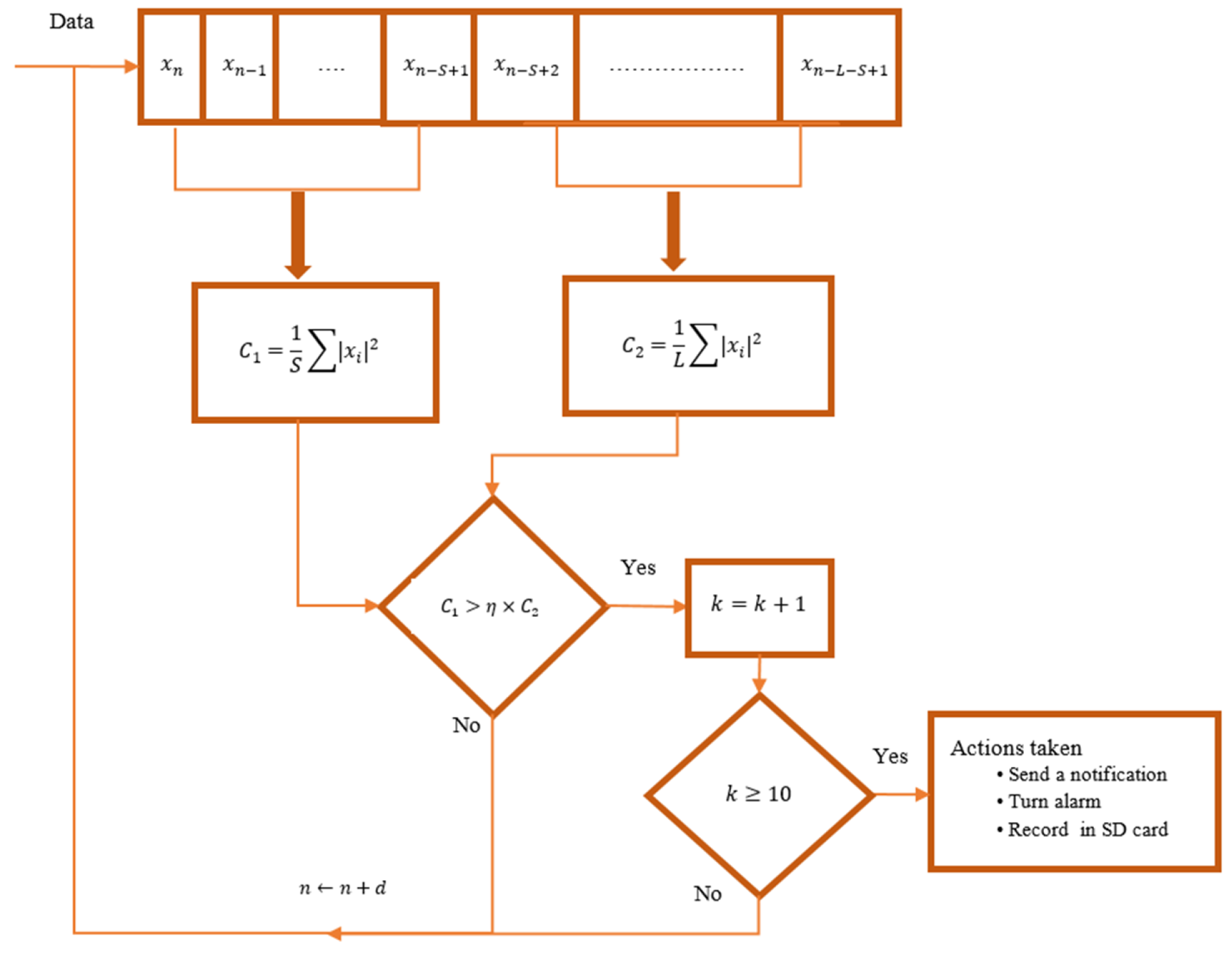
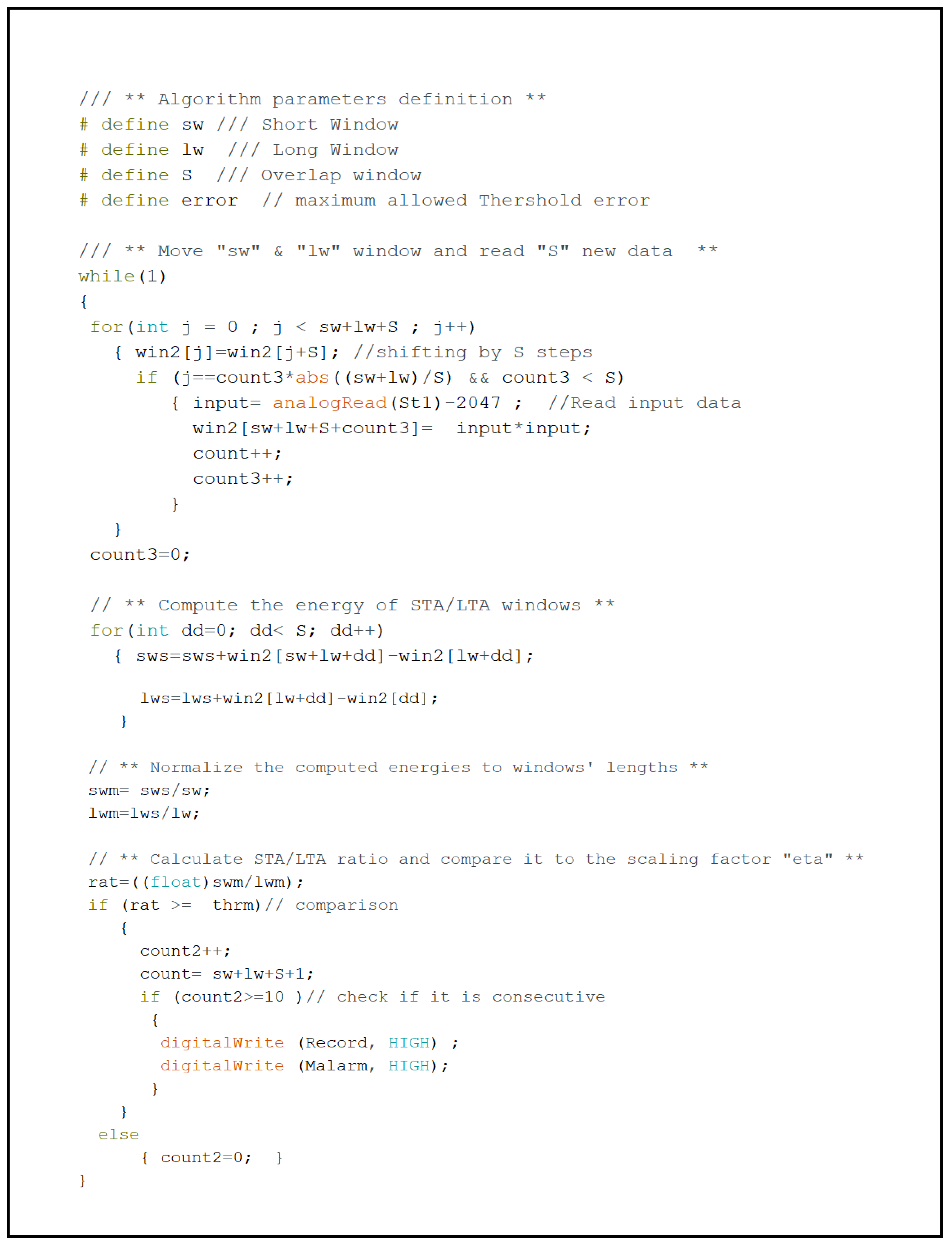
2.2. Detection Algorithm
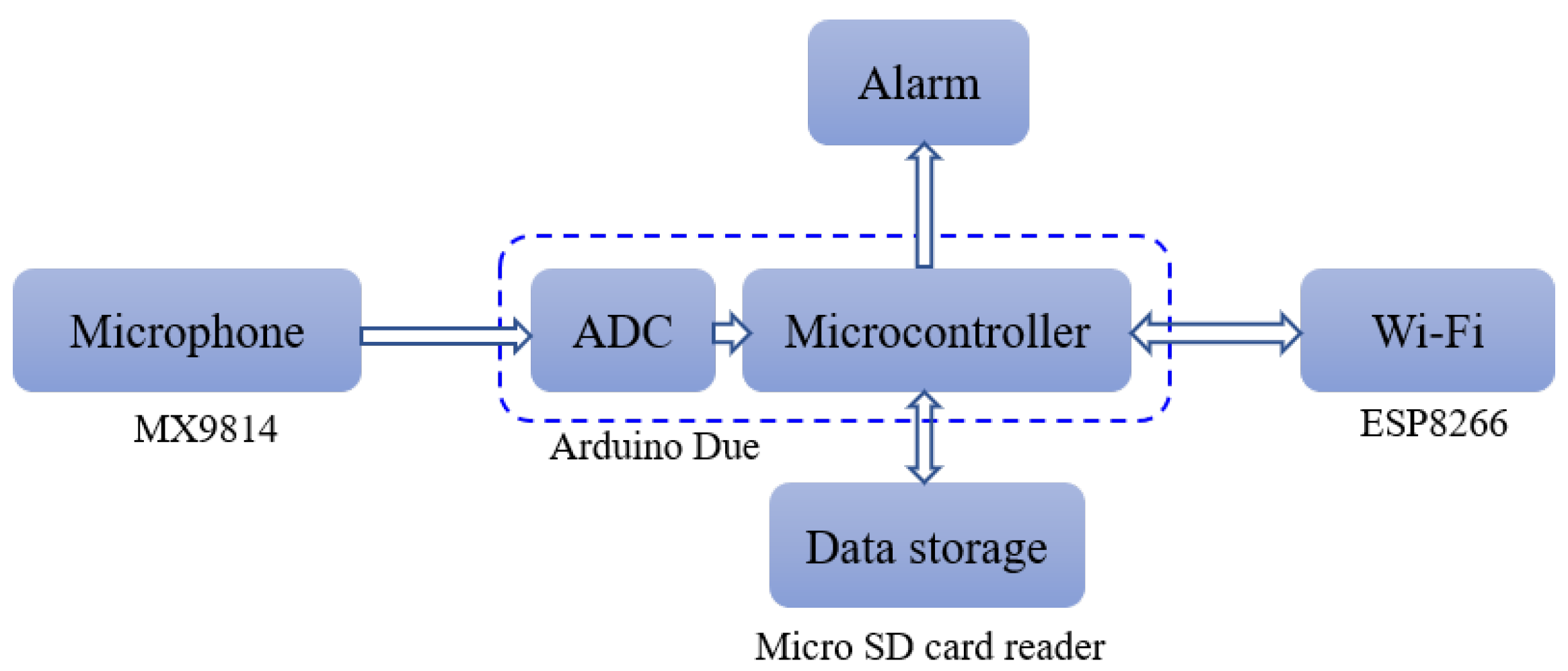
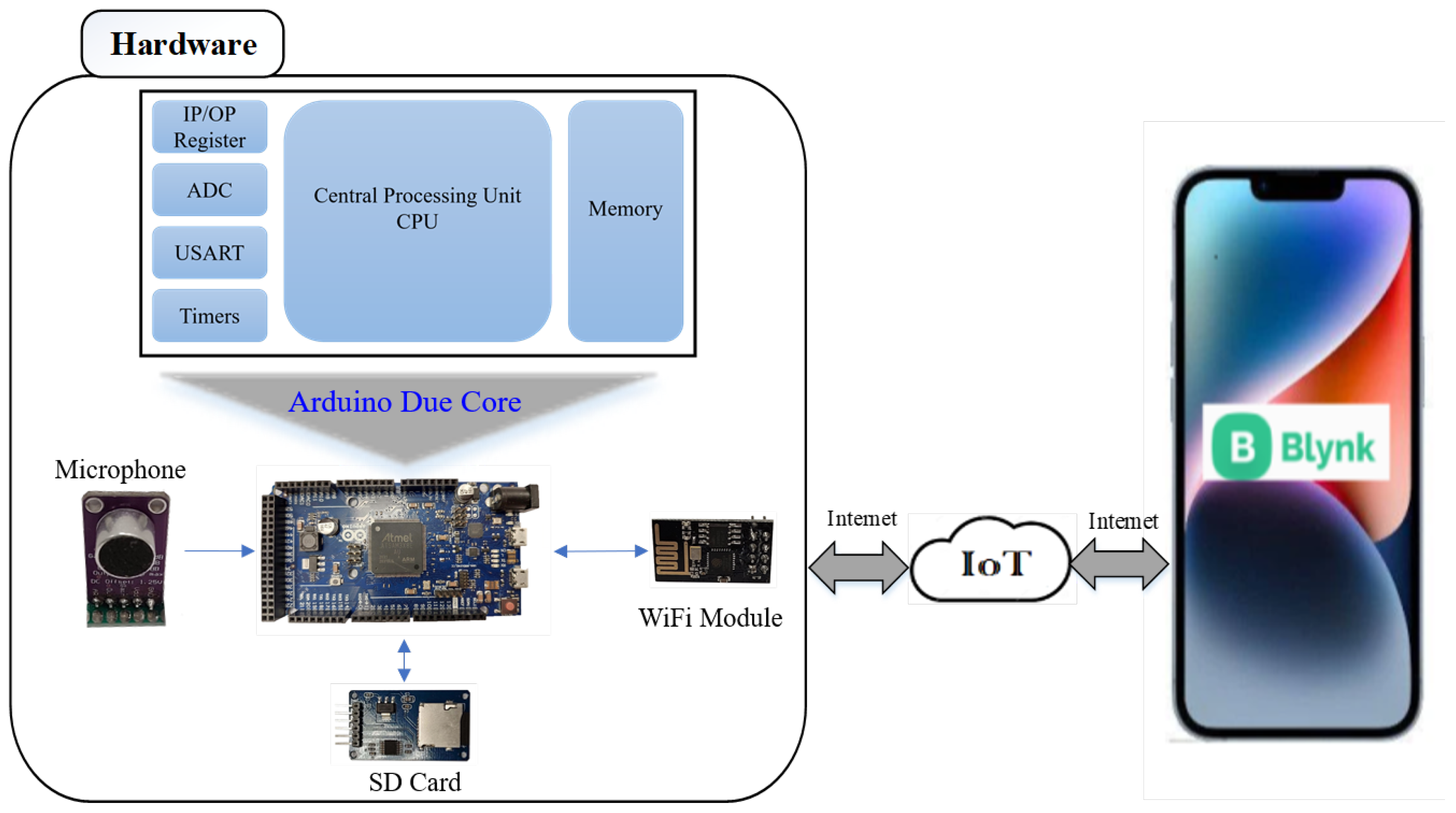
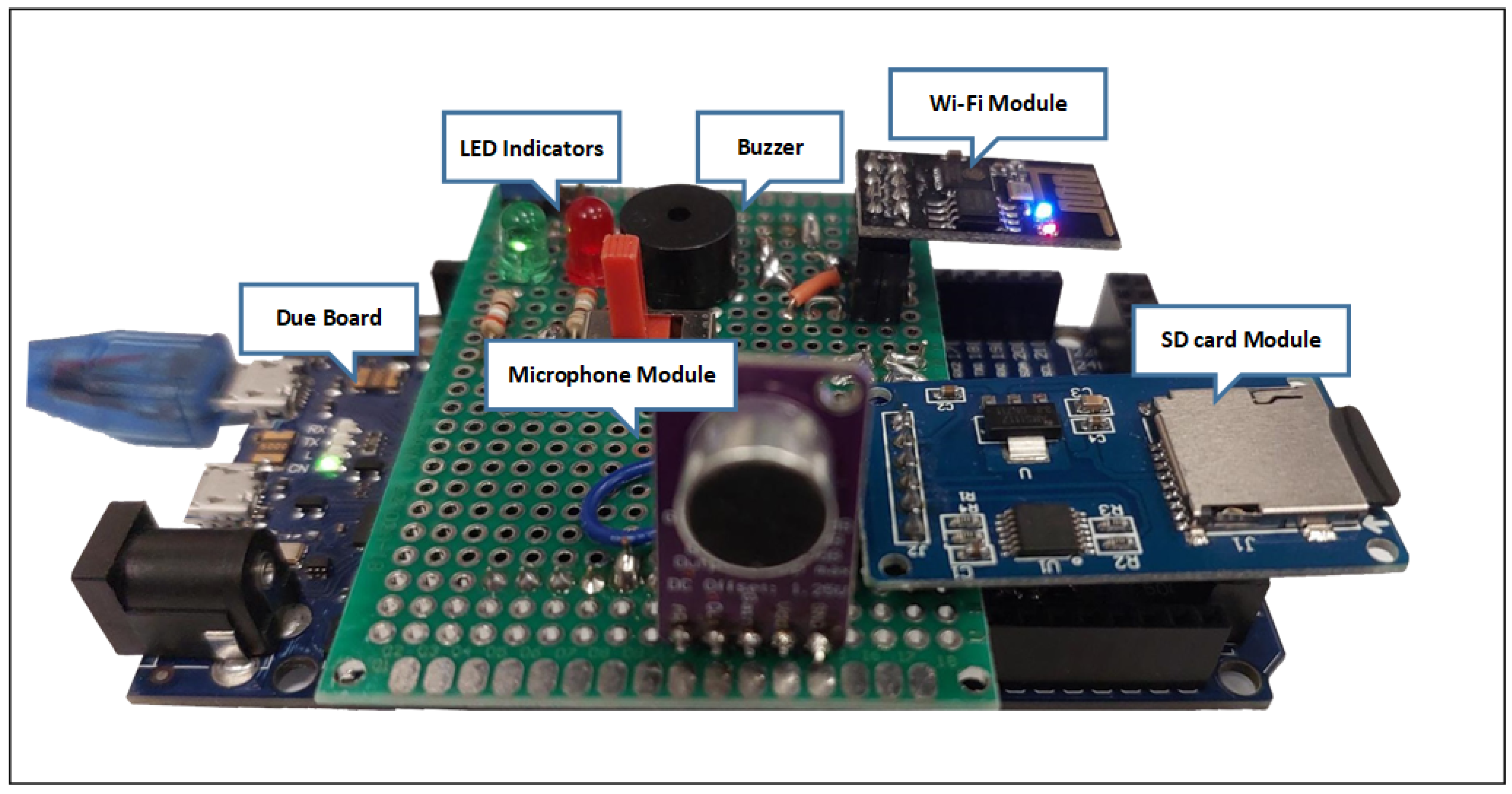
2.3. Hardware Implementation
3. Experimental Results
3.1. Selection of Algorithm’s Parameters
3.2. Hardware Demonstration
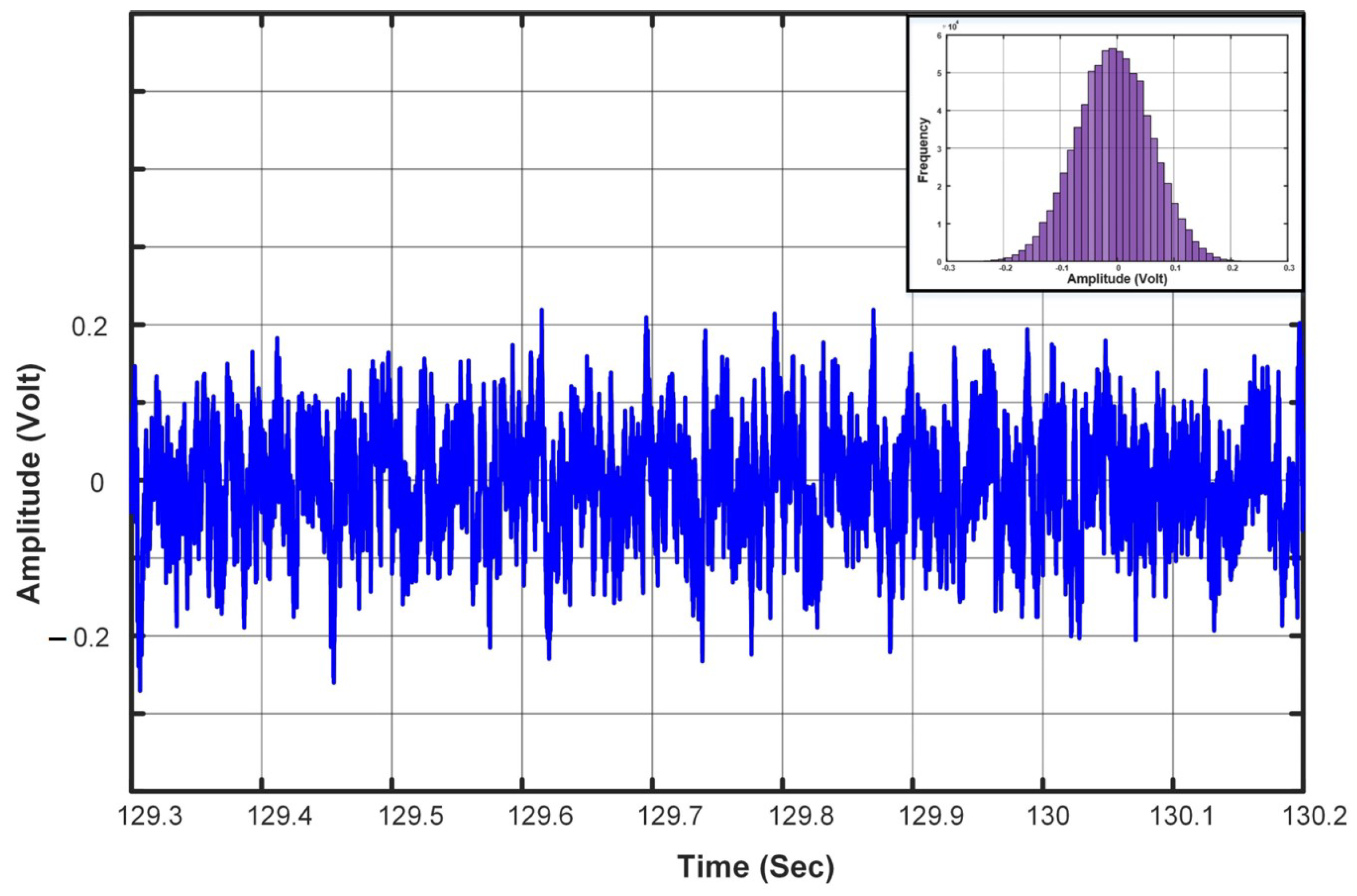
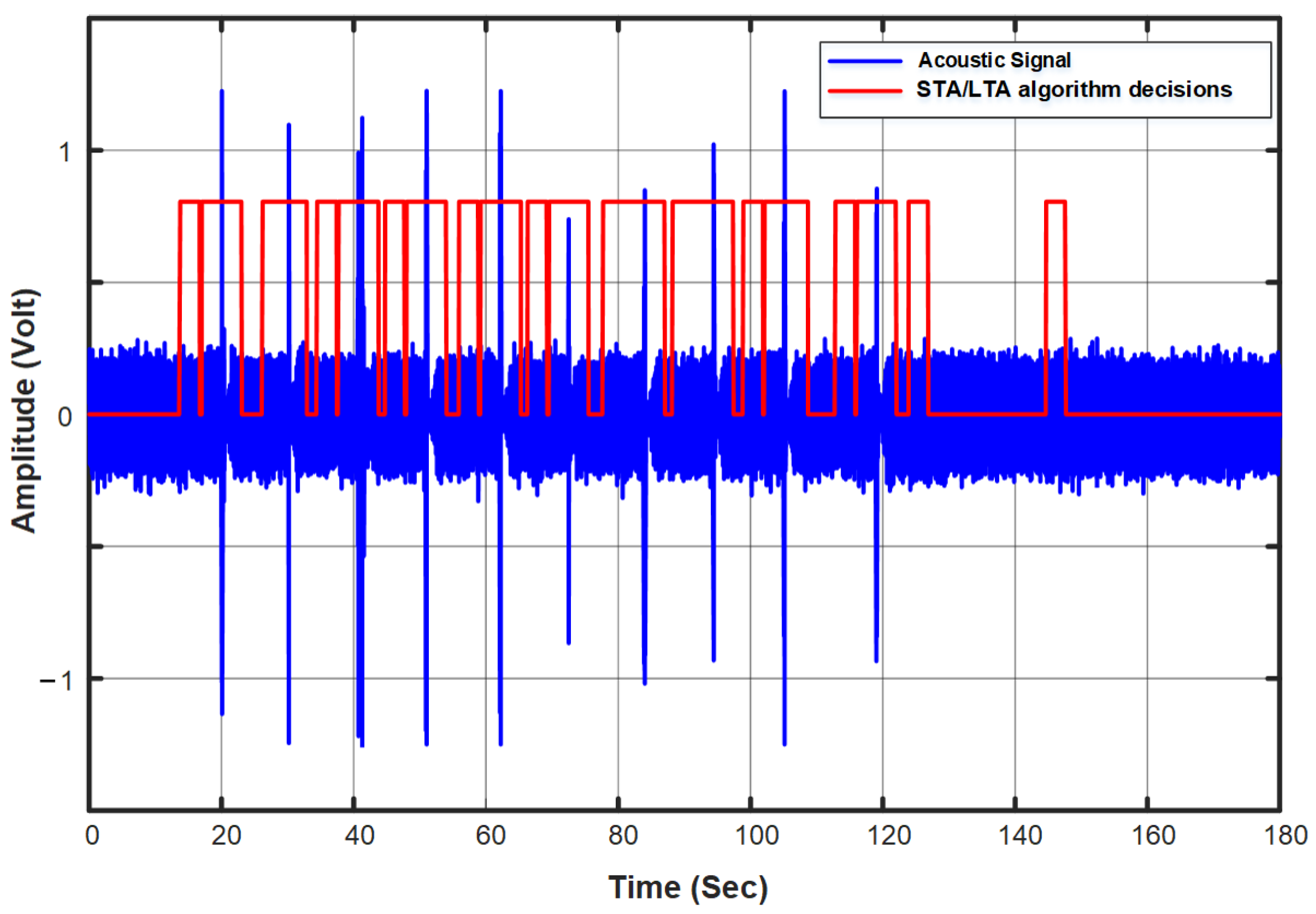
- The prototype was set to record 100 s of background noise, and then the STA/LTA algorithm was run over the recorded background signal to compute the threshold .
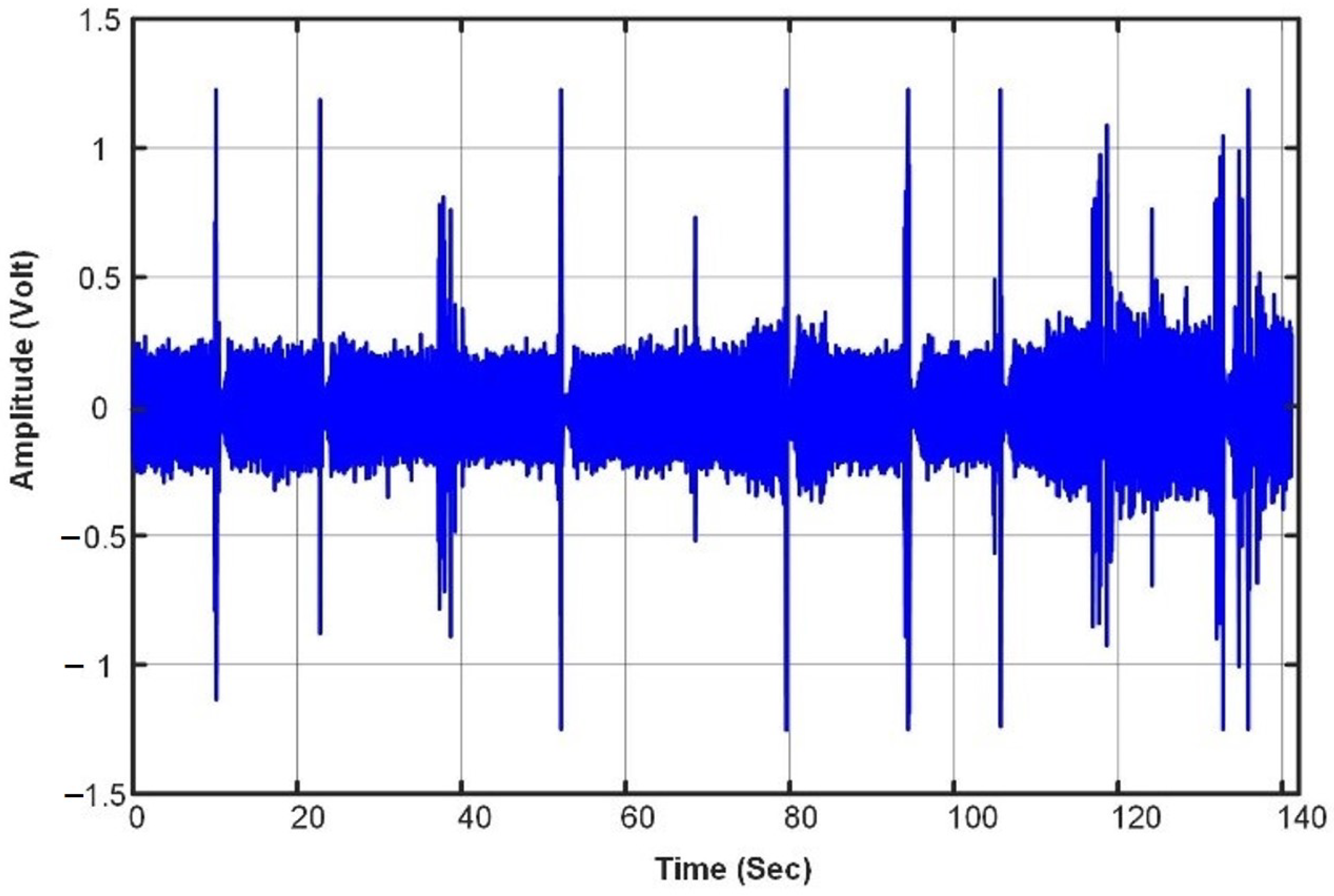
- A total of 20 different events (selected from the events mentioned in Table 2) were generated inside the lab and within a distance of 1, 2, and 5 m from the prototype location. All generated events were captured and processed by the proposed prototype.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- El-Sayed, H.; Sankar, S.; Prasad, M.; Puthal, D.; Gupta, A.; Mohanty, M.; Lin, C.T. Edge of things: The big picture on the integration of edge, IoT and the cloud in a distributed computing environment. IEEE Access 2017, 6, 1706–1717. [Google Scholar] [CrossRef]
- Cicero, S.; Cromwell, C.; Hunt, E. Cisco Predicts More IP Traffic in the Next Five Years Than in the History of the Internet; Cisco: San Jose, CA, USA, 2018. [Google Scholar]
- Hussain, M.Z.; Hanapi, Z.M. Efficient Secure Routing Mechanisms for the Low-Powered IoT Network: A Literature Review. Electronics 2023, 12, 482. [Google Scholar] [CrossRef]
- Abhinay, D.; Chaitanya, K.; Ram, P.S. Intruder Detection and Tracking Using Computer Vision and IoT. In Advances in Signal Processing and Communication Engineering: Select Proceedings of ICASPACE 2021; Springer: Berlin/Heidelberg, Germany, 2022; pp. 499–512. [Google Scholar]
- Vandana, G.; Pardhasaradhi, B.; Srihari, P. Intruder Detection and Tracking using 77GHz FMCW Radar and Camera Data. In Proceedings of the 2022 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 8–10 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Gami, H. Movement Direction and Distance Classification Using a Single PIR Sensor. IEEE Sens. Lett. 2018, 2, 6000104. [Google Scholar] [CrossRef]
- Smith, S.; Ellis, J.; Abrams, R. Chapter 8—Central Alarm Stations and Dispatch Operations. In The Professional Protection Officer; IFPO, Ed.; Butterworth-Heinemann: Boston, MA, USA, 2010; pp. 89–103. [Google Scholar] [CrossRef]
- Griffiths, H.; Cohen, L.; Watts, S.; Mokole, E.; Baker, C.; Wicks, M.; Blunt, S. Radar spectrum engineering and management: Technical and regulatory issues. Proc. IEEE 2014, 103, 85–102. [Google Scholar] [CrossRef]
- Choi, Y.K.; Kim, K.M.; Jung, J.W.; Chun, S.Y.; Park, K.S. Acoustic intruder detection system for home security. IEEE Trans. Consum. Electron. 2005, 51, 130–138. [Google Scholar] [CrossRef]
- Cheong, K.M.; Shen, Y.L.; Chi, T.S. Active acoustic scene monitoring through spectro-temporal modulation filtering for intruder detection. J. Acoust. Soc. Am. 2022, 151, 2444–2452. [Google Scholar] [CrossRef] [PubMed]
- Basutli, B.; Zungeru, A.M.; Mtengi, B.; Diarra, B. Design of a Short Range Optical Pulse Transceiver System for Intruder Detection. In Proceedings of the 2019 2nd International Conference on Electronics and Electrical Engineering Technology, Penang, Malaysia, 25–27 September 2019; pp. 68–73. [Google Scholar]
- Anchal, S.; Mukhopadhyay, B.; Kar, S. Person identification and imposter detection using footstep generated seismic signals. IEEE Trans. Instrum. Meas. 2020, 70, 1–11. [Google Scholar] [CrossRef]
- Lee, C.; Kim, D.; Kim, K. Acoustic detection based on coherence bandwidth. Electron. Lett. 2015, 51, 1387–1388. [Google Scholar] [CrossRef]
- Lin, C.H.; Cheong, K.M.; Huang, M.C.; Chen, M.Y.; Chang, C.K.; Chi, T.S. Acoustic scene change detection by spectro-temporal filtering on spectrogram using chirps. In Proceedings of the 2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Jeju, Republic of Korea, 13–15 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Park, H.; Park, J.; Kim, H.; Lee, S.Q.; Park, K.H.; Paik, J. Hybrid Sensor Network-Based Indoor Surveillance System for Intrusion Detection. Symmetry 2018, 10, 181. [Google Scholar] [CrossRef] [Green Version]
- Raspberry Pi Documentation. Available online: https://www.raspberrypi.com/documentation/ (accessed on 1 March 2023).
- Jones, J.P.; van der Baan, M. Adaptive STA–LTA with outlier statistics. Bull. Seismol. Soc. Am. 2015, 105, 1606–1618. [Google Scholar] [CrossRef]
- Mukhopadhyay, B.; Anchal, S.; Kar, S. Detection of an intruder and prediction of his state of motion by using seismic sensor. IEEE Sens. J. 2017, 18, 703–712. [Google Scholar] [CrossRef]
- Allwood, G.; Wild, G.; Hinckley, S. Optical fiber sensors in physical intrusion detection systems: A review. IEEE Sens. J. 2016, 16, 5497–5509. [Google Scholar] [CrossRef] [Green Version]
- Blynk. Low-Code IoT Software Platform for Electronics Manufacturers. Available online: https://blynk.io/ (accessed on 1 March 2023.).













| Event | Duration (s) |
|---|---|
| Use of keys | 0.219 |
| Falling of a small object | 0.1485 |
| Shrinking a plastic bag | 1.036 |
| Speaking | 0.2606 |
| Footsteps | 0.29 |
| Light switch | 0.0433 |
| Dragging table | 0.5752 |
| Wardrobe | 1.033 |
| Open door | 0.38 |
| Close door | 0.91 |
| Average | 0.49 |
| Keys | Small Object | Plastic Bag | Speaking | Steps | Switch | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D | M | F | D | M | F | D | M | F | D | M | F | D | M | F | D | M | F | |
| SE | 10 | 0 | 8 | 10 | 0 | 10 | 10 | 0 | 9 | 10 | 0 | 7 | 10 | 0 | 6 | 10 | 0 | 8 |
| AV | 10 | 0 | 9 | 10 | 0 | 13 | 10 | 0 | 1 | 10 | 0 | 10 | 10 | 0 | 3 | 20 | 0 | 10 |
| LE | 10 | 0 | 7 | 10 | 0 | 6 | 10 | 0 | 1 | 10 | 0 | 6 | 10 | 0 | 4 | 10 | 0 | 5 |
| Drag Table | Wardrobe | Open Door | Close Door | Background | ||||||||||||||
| D | M | F | D | M | F | D | M | F | D | M | F | D | M | F | ||||
| SE | 10 | 0 | 5 | 10 | 0 | 21 | 10 | 0 | 30 | 10 | 0 | 25 | 0 | 0 | 18 | |||
| AV | 10 | 0 | 2 | 10 | 0 | 8 | 10 | 0 | 10 | 10 | 0 | 9 | 0 | 0 | 2 | |||
| LE | 10 | 0 | 2 | 10 | 0 | 7 | 10 | 0 | 7 | 10 | 0 | 6 | 0 | 0 | 4 | |||
| STA | k = 1 | k = 5 | k = 10 | k = 20 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D | M | F | D | M | F | D | M | F | D | M | F | |
| SE = 0.043 | 18 | 0 | 8 | 14 | 0 | 4 | 11 | 0 | 1 | 10 | 0 | 0 |
| AV = 0.49 | 19 | 0 | 9 | 19 | 0 | 9 | 19 | 0 | 9 | 19 | 0 | 9 |
| LE = 1.036 | 17 | 0 | 7 | 16 | 0 | 6 | 16 | 0 | 6 | 15 | 0 | 5 |
| STA | Step Size | k = 1 | k = 5 | k = 10 | k = 20 |
|---|---|---|---|---|---|
| SE = 0.043 | 14 | 8 | 4 | 1 | 0 |
| 28 | 8 | 1 | 0 | 0 | |
| 42 | 8 | 1 | 0 | 0 | |
| 56 | 8 | 0 | 0 | 0 |
| Recorded | BG #1 | BG #2 | BG #3 | BG #4 | BG #5 | Avg. Time (ms) |
|---|---|---|---|---|---|---|
| System | 2.1 | 1.95 | 2.2 | 2.25 | 2.25 | 523.36 |
| MATLAB | 2.1 | 1.95 | 2.2 | 2.25 | 2.25 | 1.71 |
| Record | D #1 | D #2 | D #3 | D #4 | D #5 |
|---|---|---|---|---|---|
| System | 5 | 5 | 5 | 5 | 5 |
| MATLAB | 5 | 5 | 5 | 5 | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Khalli, N.; Alateeq, S.; Almansour, M.; Alhassoun, Y.; Ibrahim, A.B.; Alshebeili, S.A. Real-Time Detection of Intruders Using an Acoustic Sensor and Internet-of-Things Computing. Sensors 2023, 23, 5792. https://doi.org/10.3390/s23135792
Al-Khalli N, Alateeq S, Almansour M, Alhassoun Y, Ibrahim AB, Alshebeili SA. Real-Time Detection of Intruders Using an Acoustic Sensor and Internet-of-Things Computing. Sensors. 2023; 23(13):5792. https://doi.org/10.3390/s23135792
Chicago/Turabian StyleAl-Khalli, Najeeb, Saud Alateeq, Mohammed Almansour, Yousef Alhassoun, Ahmed B. Ibrahim, and Saleh A. Alshebeili. 2023. "Real-Time Detection of Intruders Using an Acoustic Sensor and Internet-of-Things Computing" Sensors 23, no. 13: 5792. https://doi.org/10.3390/s23135792