
NR5G-SAM: A SLAM Framework for Field Robot Applications Based on 5G New Radio

Abstract
:1. Introduction
- Which are the relevant attempts for radio localization and mapping in field robotics?
- Can we perform localization assisted by cellular 5G NR signals and Millimeter Wave (mmWave) and what accuracy can we expect?
- Can we use 5G NR CSI to interpolate REMs at a given geographic location?
- Can we use 5G NR coupled with other sensor modalities for localization and a REM as a radio SLAM framework?
- How would the NR5G-SAM framework perform compared to a state-of-the-art LiDAR SLAM approach in a relevant outdoor environment?
2. Related Work
2.1. Radio Technologies and 5G NR
2.2. SLAM
3. Methodology
3.1. NR5G-SAM System
3.2. User Equipment Block (UEB)
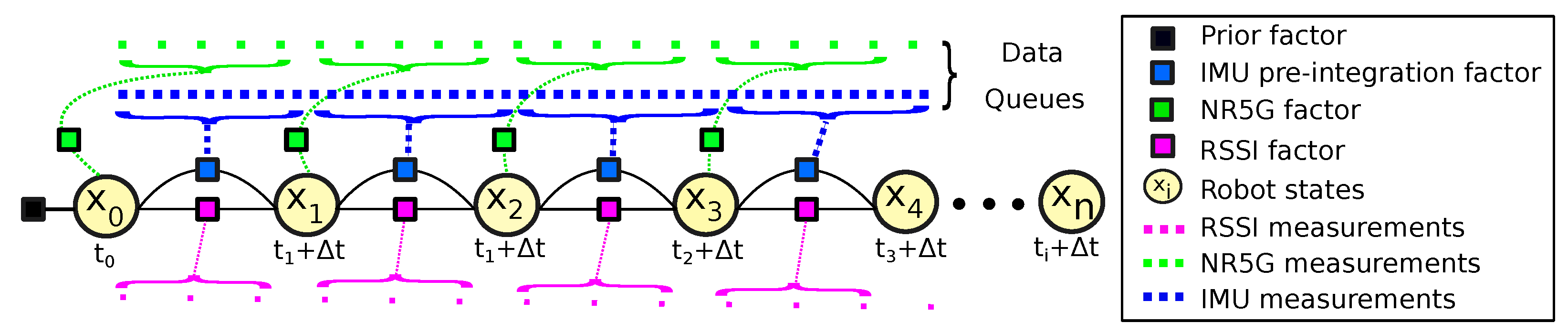
3.3. Front-End Block (FEB)
3.3.1. Prior Factor
3.3.2. NR5G Factors
3.3.3. IMU Factors
3.3.4. RSSI Factors
3.4. Back-End Block (BEB)
4. Experimental Validation
Evaluation Metrics
5. Results and Discussion
6. Lessons Learned
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3GPP | Third Generation Partnership Project |
| 5G | Fifth Generation Mobile Network |
| ACF | Auto Correlation Function |
| A/D | Analog-to-Digital |
| AoA | Angle of Arrival |
| AoD | Angle of Departure |
| AP | Access Point |
| BEB | Back-End Block |
| BLE | Bluetooth Low Energy |
| BS | Base Station |
| BP | Back Propagation |
| CAV | Connected Autonomous Vehicle |
| CLP | Collaborative Localization Protocol |
| CRLB | Cramér–Rao Lower Bound |
| CSI | Channel State Information |
| CSI-RS | Channel State Information Reference Signal |
| DoA | Direction of Arrival |
| DoF | Degrees of Freedom |
| dBm | Decibel Milliwatts |
| DL | Down-Link |
| ESPRIT | Estimation of Signal Parameters by Rotational Invariance Technique |
| EKF | Extended Kalman Filter |
| FEB | Front-End Block |
| FFT | Fast Fourier Transform |
| FIM | Fisher Information Matrix |
| GA | Genetic Algorithm |
| GGMR | Growing Gaussian Mixture Regression |
| GNSS | Global Navigation Satellite Systems |
| gNB | gNodeB |
| IDW | Inverse Distance Weighted |
| IMU | Inertial Measurement Unit |
| IoT | Internet of Things |
| LS | Least Squares |
| LiDAR | Light Detection And Ranging |
| LoS | Line-of-Sight |
| LoRa | Long-Range Protocol |
| LTE | Long-Term Evolution |
| MAP | Maximum A Posteriori |
| MCS | Modulation Carrier Scheme |
| MEC | Mobile Edge Computing |
| MIMO | Multiple-Input Multiple-Output |
| MLE | Maximum Likelihood Estimator |
| mmWave | Millimeter Wave |
| MPC | Multi-Path Components |
| MLP | Multi-Layer Perceptron |
| NLoS | Non-Line-of-Sight |
| NSA | Non Stand Alone |
| NR | New Radio |
| OEB | Orientation Error Bound |
| OFDM | Orthogonal Frequency-Division Multiplexing |
| PEB | Position Error Bound |
| PF | Particle Filter |
| PRS | Position Reference Signal |
| PHY | Physical Layer |
| PDSCH | Physical Downlink Shared Channel |
| PRS | Positioning Reference Signal |
| QPSK | Quadrature Phase Shift Keying |
| RF | Radio Frequency |
| RBPF | Rao-Blackwellized Particle Filter |
| RLP | Round-Trip Localization Protocol |
| RMSE | Root Mean Square Error |
| RSRP | Reference Signal Received Power |
| RSRQ | Reference Signal Received Quality |
| RSS | Received Signal Strength |
| RSSI | Received Signal Strength Indicator |
| REM | Radio Environmental Map |
| ROS | Robot Operating System |
| RIS | Reconfigurable Intelligent Surfaces |
| SA | Stand Alone |
| SAM | Smoothing and Mapping |
| SLAM | Simultaneous Localization and Mapping |
| SNR | Signal to Noise Ratio |
| SLAM | Simultaneous Localization and Mapping |
| SCS | Sub-Carrier Spacing |
| ToF | Time of Flight |
| TDoA | Time Difference of Arrival |
| ToA | Time of Arrival |
| TWL | Two-Way Localization |
| UAVs | Unmanned Aerial Vehicles |
| UDN | Ultra-Dense Network |
| UE | User Equipment |
| UEB | User Equipment Block |
| UWB | Ultra Wideband |
| UMa | Urban Macro-Cell |
| UL | Up-Link |
| UGV | Unmanned Ground Vehicle |
| VA | Virtual Anchor |
| WiFi | Wireless Fidelity |
References
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.U.; Zaidi, S.A.A.; Ishtiaq, A.; Bukhari, S.U.R.; Samer, S.; Farman, A. A Comparative Survey of LiDAR-SLAM and LiDAR based Sensor Technologies. In Proceedings of the Mohammad Ali Jinnah University International Conference on Computing (MAJICC), Karachi, Pakistan, 15–17 July 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Lategahn, H.; Geiger, A.; Kitt, B. Visual SLAM for autonomous ground vehicles. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1732–1737. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, H.; Wang, P.; Nogueira, L.; Scherer, S. Super Odometry: IMU-centric LiDAR-Visual-Inertial Estimator for Challenging Environments. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 8729–8736. [Google Scholar] [CrossRef]
- Xhafa, A.; del Peral-Rosado, J.A.; López-Salcedo, J.A.; Seco-Granados, G. Evaluation of 5G Positioning Performance Based on UTDoA, AoA and Base-Station Selective Exclusion. Sensors 2022, 22, 101. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Xiao, B.; Wu, C.; Guo, Y.; Li, L. Factor graph based navigation and positioning for control system design: A review. Chin. J. Aeronaut. 2022, 35, 25–39. [Google Scholar] [CrossRef]
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Kaess, M.; Johannsson, H.; Roberts, R.; Ila, V.; Leonard, J.J.; Dellaert, F. iSAM2: Incremental smoothing and mapping using the Bayes tree. Int. J. Robot. Res. 2012, 31, 216–235. [Google Scholar] [CrossRef]
- Oguejiofor, O.; Okorogu, V.; Abe, A.; Bo, O. Outdoor Localization System Using RSSI Measurement of Wireless Sensor Network. Int. J. Innov. Technol. Explor. Eng. 2013, 2, 1–6. [Google Scholar]
- Dinh-Van, N.; Nashashibi, F.; Thanh-Huong, N.; Castelli, E. Indoor Intelligent Vehicle localization using WiFi received signal strength indicator. In Proceedings of the 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 19–21 March 2017; pp. 33–36. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.W.; Yang, S.X.; Yang, L. Method of improving WiFi SLAM based on spatial and temporal coherence. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1991–1996. [Google Scholar] [CrossRef]
- ETSI. Study on Channel Model for Frequencies from 0.5 to 100 GHz (3GPP TR 38.901 Version 16.1.0 Release 16 (V16.1.0)); Technical Report; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- Zhang, K.; Zhang, R.; Wu, J.; Jiang, Y.; Tang, X. Measurement and Modeling of Path Loss and Channel Capacity Analysis for 5G UMa Scenario. In Proceedings of the 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar] [CrossRef]
- Karfakis, P.T.; Couceiro, M.S.; Portugal, D.; Antunes, C.H. A Comparative Study of Mobile Robot Positioning Using 5G-NR. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Workshop in Innovation in Forestry Robotics: Research and Industry Adoption, Philadelphia, PA, USA, 23–27 May 2022. [Google Scholar] [CrossRef]
- Sato, A.; Nakajima, M.; Kohtake, N. Rapid BLE Beacon Localization with Range-Only EKF-SLAM Using Beacon Interval Constraint. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, J.; Meng, Z.; Wang, L. Efficient Probabilistic Approach to Range-Only SLAM With a Novel Likelihood Model. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Huang, J.; Millman, D.; Quigley, M.; Stavens, D.; Thrun, S.; Aggarwal, A. Efficient, generalized indoor WiFi GraphSLAM. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1038–1043. [Google Scholar] [CrossRef] [Green Version]
- Kwasme, H.; Ekin, S. RSSI-Based Localization Using LoRaWAN Technology. IEEE Access 2019, 7, 99856–99866. [Google Scholar] [CrossRef]
- Margolies, R.; Becker, R.; Byers, S.; Deb, S.; Jana, R.; Urbanek, S.; Volinsky, C. Can you find me now? Evaluation of network-based localization in a 4G LTE network. In Proceedings of the IEEE INFOCOM 2017—IEEE Conference on Computer Communications, Atlanta, GA, USA, 1–4 May 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Gante, J.; Sousa, L.; Falcao, G. Dethroning GPS: Low-Power Accurate 5G Positioning Systems Using Machine Learning. IEEE J. Emerg. Sel. Top. Circuits Syst. 2020, 10, 240–252. [Google Scholar] [CrossRef]
- Shah, B.M.; Murtaza, M.; Raza, M. Comparison of 4G and 5G Cellular Network Architecture and Proposing of 6G, a new era of AI. In Proceedings of the 5th International Conference on Innovative Technologies in Intelligent Systems and Industrial Applications (CITISIA), Sydney, Australia, 25–27 November 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A Survey of Enabling Technologies for Network Localization, Tracking, and Navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef] [Green Version]
- Sivasakthiselvan, S.; Nagarajan, V. Localization Techniques of Wireless Sensor Networks: A Review. In Proceedings of the 2020 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 28–30 July 2020; pp. 1643–1648. [Google Scholar] [CrossRef]
- del Peral-Rosado, J.A.; Raulefs, R.; López-Salcedo, J.A.; Seco-Granados, G. Survey of Cellular Mobile Radio Localization Methods: From 1G to 5G. IEEE Commun. Surv. Tutor. 2018, 20, 1124–1148. [Google Scholar] [CrossRef]
- Esposti, V.D. Ray tracing: Techniques, applications and prospect. In Proceedings of the 2020 International Symposium on Antennas and Propagation (ISAP), Osaka, Japan, 25–28 January 2021; pp. 307–308. [Google Scholar] [CrossRef]
- Chaloupka, Z. Technology and Standardization Gaps for High Accuracy Positioning in 5g. IEEE Commun. Stand. Mag. 2017, 1, 59–65. [Google Scholar] [CrossRef]
- Witrisal, K.; Meissner, P.; Leitinger, E.; Shen, Y.; Gustafson, C.; Tufvesson, F.; Haneda, K.; Dardari, D.; Molisch, A.F.; Conti, A.; et al. High-Accuracy Localization for Assisted Living: 5G systems will turn multipath channels from foe to friend. IEEE Signal Process. Mag. 2016, 33, 59–70. [Google Scholar] [CrossRef]
- Koivisto, M.; Costa, M.; Werner, J.; Heiska, K.; Talvitie, J.; Leppänen, K.; Koivunen, V.; Valkama, M. Joint Device Positioning and Clock Synchronization in 5G Ultra-Dense Networks. IEEE Trans. Wirel. Commun. 2017, 16, 2866–2881. [Google Scholar] [CrossRef] [Green Version]
- Abu-Shaban, Z.; Zhou, X.; Abhayapala, T.; Seco-Granados, G.; Wymeersch, H. Error Bounds for Uplink and Downlink 3D Localization in 5G Millimeter Wave Systems. IEEE Trans. Wirel. Commun. 2018, 17, 4939–4954. [Google Scholar] [CrossRef] [Green Version]
- Abu-Shaban, Z.; Wymeersch, H.; Abhayapala, T.; Seco-Granados, G. Single-Anchor Two-Way Localization Bounds for 5G mmWave Systems. IEEE Trans. Veh. Technol. 2020, 69, 6388–6400. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Zhang, F.; Wang, B.; Liu, K.J.R. Massive MIMO for High-Accuracy Target Localization and Tracking. IEEE Internet Things J. 2021, 8, 10131–10145. [Google Scholar] [CrossRef]
- Wu, Z.H.; Han, Y.; Chen, Y.; Liu, K.J.R. A Time-Reversal Paradigm for Indoor Positioning System. IEEE Trans. Veh. Technol. 2015, 64, 1331–1339. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, C.; Wang, B.; Lai, H.Q.; Han, Y.; Liu, K.J.R. WiBall: A Time-Reversal Focusing Ball Method for Decimeter-Accuracy Indoor Tracking. IEEE Internet Things J. 2018, 5, 4031–4041. [Google Scholar] [CrossRef] [Green Version]
- Pesko, M.; Javornik, T.; Košir, A.; Štular, M.; Mohorčič, M. Radio Environment Maps: The Survey of Construction Methods. KSII Trans. Internet Inf. Syst. 2014, 8, 3789–3809. [Google Scholar] [CrossRef]
- Denkovski, D.; Atanasovski, V.; Gavrilovska, L.; Riihijårvi, J.; Måhønen, P. Reliability of a Radio Environment Map: Case of Spatial Interpolation Techniques. In Proceedings of the 7th IEEE International ICST Conference on Cognitive Radio Oriented Wireless Networks and Communications (CROWNCOM), Stockholm, Sweden, 18–20 June 2012; pp. 248–253. [Google Scholar] [CrossRef] [Green Version]
- Alaya-Feki, A.B.H.; Jemaa, S.B.; Sayrac, B.; Houze, P.; Moulines, E. Informed spectrum usage in cognitive radio networks: Interference cartography. In Proceedings of the 19th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Cannes, France, 15–18 September 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Phillips, C.; Ton, M.; Sicker, D.; Grunwald, D. Practical radio environment mapping with geostatistics. In Proceedings of the 2012 IEEE International Symposium on Dynamic Spectrum Access Networks, Bellevue, WA, USA, 16–19 October 2012; pp. 422–433. [Google Scholar] [CrossRef]
- Angjelicinoski, M.; Atanasovski, V.; Gavrilovska, L. Comparative analysis of spatial interpolation methods for creating radio environment maps. In Proceedings of the 2011 19th Telecommunications Forum (TELFOR) Proceedings of Papers, Belgrade, Serbia, 22–24 November 2011; pp. 334–337. [Google Scholar] [CrossRef]
- Yilmaz, H.B.; Tugcu, T. Location estimation-based radio environment map construction in fading channels. Wirel. Commun. Mob. Comput. 2015, 15, 561–570. [Google Scholar] [CrossRef]
- Sun, G.; van de Beek, J. Simple distributed interference source localization for radio environment mapping. In Proceedings of the IFIP Wireless Days, Venice, Italy, 20–22 October 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Ould Isselmou, Y.; Wackernagel, H.; Tabbara, W.; Wiart, J. Geostatistical interpolation for mapping radio-electric exposure levels. In Proceedings of the 2006 First European Conference on Antennas and Propagation, Nice, France, 6–10 November 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Barneto, C.B.; Riihonen, T.; Turunen, M.; Koivisto, M.; Talvitie, J.; Valkama, M. Radio-based sensing and environment mapping in millimeter-wave 5G and beyond networks. In Proceedings of the IEEE International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, X.; Letaief, K.B. Hybrid Beamforming for 5G and Beyond Millimeter-Wave Systems: A Holistic View. IEEE Open J. Commun. Soc. 2020, 1, 77–91. [Google Scholar] [CrossRef] [Green Version]
- Azpilicueta, L.; Lopez-Iturri, P.; Zuñiga-Mejia, J.; Celaya-Echarri, M.; Rodríguez-Corbo, F.A.; Vargas-Rosales, C.; Aguirre, E.; Michelson, D.G.; Falcone, F. Fifth-generation (5G) mmWave spatial channel characterization for urban environments’ system analysis. Sensors 2020, 20, 5360. [Google Scholar] [CrossRef]
- Heimann, K.; Tiemann, J.; Yolchyan, D.; Wietfeld, C. Experimental 5G mmWave Beam Tracking Testbed for Evaluation of Vehicular Communications. In Proceedings of the 2019 IEEE 2nd 5G World Forum (5GWF), Dresden, Germany, 30 September–2 October 2019; pp. 382–387. [Google Scholar] [CrossRef]
- Kim, H.; Wymeersch, H.; Garcia, N.; Seco-Granados, G.; Kim, S. 5G mmWave Vehicular Tracking. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 541–547. [Google Scholar] [CrossRef] [Green Version]
- Win, M.Z.; Meyer, F.; Liu, Z.; Dai, W.; Bartoletti, S.; Conti, A. Efficient Multisensor Localization for the Internet of Things: Exploring a New Class of Scalable Localization Algorithms. IEEE Signal Process. Mag. 2018, 35, 153–167. [Google Scholar] [CrossRef] [Green Version]
- Chiang, K.; Tsai, G.; Chang, H.; Joly, C.; EI-Sheimy, N. Seamless navigation and mapping using an INS/GNSS/grid-based SLAM semi-tightly coupled integration scheme. Inf. Fusion 2019, 50, 181–196. [Google Scholar] [CrossRef]
- Leitinger, E.; Meyer, F.; Hlawatsch, F.; Witrisal, K.; Tufvesson, F.; Win, M.Z. A Belief Propagation Algorithm for Multipath-Based SLAM. IEEE Trans. Wirel. Commun. 2019, 18, 5613–5629. [Google Scholar] [CrossRef] [Green Version]
- Gentner, C.; Jost, T.; Wang, W.; Zhang, S.; Dammann, A.; Fiebig, U.C. Multipath Assisted Positioning with Simultaneous Localization and Mapping. IEEE Trans. Wirel. Commun. 2016, 15, 6104–6117. [Google Scholar] [CrossRef] [Green Version]
- Gentner, C.; Ulmschneider, M.; Karásek, R.; Dammann, A. Simultaneous Localization of a Receiver and Mapping of Multipath Generating Geometry in Indoor Environments. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Schouten, G.; Steckel, J. RadarSLAM: Biomimetic SLAM using ultra-wideband pulse-echo radar. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Kadambi, S.; Behboodi, A.; Soriaga, J.B.; Welling, M.; Amiri, R.; Yerramalli, S.; Yoo, T. Neural RF SLAM for unsupervised positioning and mapping with channel state information. arXiv 2022, arXiv:2203.08264. [Google Scholar]
- Leitinger, E.; Teague, B.; Zhang, W.; Liang, M.; Meyer, F. Data Fusion for Radio Frequency SLAM with Robust Sampling. arXiv 2022, arXiv:2206.09746. [Google Scholar] [CrossRef]
- Ismail, K.; Liu, R.; Qin, Z.; Athukorala, A.; Lau, B.P.L.; Shalihan, M.; Yuen, C.; Tan, U.X. Efficient WiFi LiDAR SLAM for Autonomous Robots in Large Environments. arXiv 2022, arXiv:2206.08733. [Google Scholar] [CrossRef]
- Arun, A.; Ayyalasomayajula, R.; Hunter, W.; Bharadia, D. P2SLAM: Bearing Based WiFi SLAM for Indoor Robots. IEEE Robot. Autom. Lett. 2022, 7, 3326–3333. [Google Scholar] [CrossRef]
- Gao, X.; Liu, Y.; Mu, X. SLARM: Simultaneous Localization and Radio Mapping for Communication-aware Connected Robot. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Jirků, M.; Kubelka, V.; Reinstein, M. WiFi localization in 3D. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4551–4557. [Google Scholar] [CrossRef]
- Lee, Y.C.; Yu, W. 3D Portable Mapping System to Build Radio Fingerprints and Spatial Map. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 21–23 October 2020; pp. 1641–1643. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M. Geometric Approach in Simultaneous Context Inference, Localization and Mapping using mm-Wave. In Proceedings of the 2018 25th International Conference on Telecommunications (ICT), Saint-Malo, France, 26–28 June 2018; pp. 159–164. [Google Scholar] [CrossRef]
- Iozsa, A.; Vesa, A. The ESPRIT algorithm. Variants and precision. In Proceedings of the 2010 9th International Symposium on Electronics and Telecommunications, Timisoara, Romania, 11–12 November 2010; pp. 165–168. [Google Scholar] [CrossRef]
- Ge, Y.; Jiang, F.; Zhu, M.; Wen, F.; Svensson, L.; Wymeersch, H. 5G SLAM with Low-complexity Channel Estimation. In Proceedings of the 2021 15th European Conference on Antennas and Propagation (EuCAP), Dusseldorf, Germany, 22–26 March 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Wen, F.; Wymeersch, H. 5G Synchronization, Positioning, and Mapping From Diffuse Multipath. IEEE Wirel. Commun. Lett. 2021, 10, 43–47. [Google Scholar] [CrossRef]
- Mendrzik, R.; Meyer, F.; Bauch, G.; Win, M. Localization, Mapping, and Synchronization in 5G Millimeter Wave Massive MIMO Systems. In Proceedings of the 2019 IEEE 20th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Cannes, France, 2–5 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Ge, Y.; Wen, F.; Kim, H.; Zhu, M.; Jiang, F.; Kim, S.; Svensson, L.; Wymeersch, H. 5G SLAM Using the Clustering and Assignment Approach with Diffuse Multipath. Sensors 2020, 20, 4656. [Google Scholar] [CrossRef] [PubMed]
- Casarrubias-Vargas, H.; Petrilli-Barceló, A.; Bayro-Corrochano, E. EKF-SLAM and Machine Learning Techniques for Visual Robot Navigation. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 396–399. [Google Scholar] [CrossRef]
- Al-Tarras, A.E.; Yacoub, M.I.; Asfoor, M.S.; Sharaf, A.M. Experimental Evaluation of Computation Cost of FastSLAM Algorithm for Unmanned Ground Vehicles. In Proceedings of the 2019 7th International Conference on Control, Mechatronics and Automation (ICCMA), Delft, The Netherlands, 6–8 November 2019; pp. 78–83. [Google Scholar] [CrossRef]
- Ren, J. An improved binocular LSD_SLAM method for object localization. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 27–29 June 2020; pp. 30–33. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardós, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- Yuan, W.; Li, Z.; Su, C.Y. RGB-D sensor-based visual SLAM for localization and navigation of indoor mobile robot. In Proceedings of the 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), Macau, China, 18–20 August 2016; pp. 82–87. [Google Scholar] [CrossRef]
- Grisetti, G.; Kümmerle, R.; Stachniss, C.; Burgard, W. A Tutorial on Graph-Based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Andersone, I. Heterogeneous Map Merging: State of the Art. Robotics 2019, 8, 74. [Google Scholar] [CrossRef] [Green Version]
- Mirowski, P.; Ho, T.K.; Yi, S.; MacDonald, M. SignalSLAM: Simultaneous localization and mapping with mixed WiFi, Bluetooth, LTE and magnetic signals. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013; pp. 1–10. [Google Scholar] [CrossRef]
- Farnham, T. Radio environment map techniques and performance in the presence of errors. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Kakalou, I.; Psannis, K.; Goudos, S.K.; Yioultsis, T.V.; Kantartzis, N.V.; Ishibashi, Y. Radio Environment Maps for 5G Cognitive Radio Network. In Proceedings of the 2019 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Kaniewski, P.; Golan, E. Localization of Transmitters in VHF Band Based on the Radio Environment Maps Concept. In Proceedings of the 2019 Communication and Information Technologies (KIT), Vysoke Tatry, Slovakia, 9–11 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Moore, T.; Stouch, D. A Generalized Extended Kalman Filter Implementation for the Robot Operating System. In Proceedings of the 13th International Conference on Intelligent Autonomous Systems (IAS-13), Padova, Italy, 15–18 July 2014. [Google Scholar] [CrossRef]
- Särkkä, S.; Svensson, L. Levenberg-Marquardt and Line-Search Extended Kalman Smoothers. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 5875–5879. [Google Scholar] [CrossRef]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual–Inertial Odometry. IEEE Trans. Robot. 2017, 33, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Taheribakhsh, M.; Jafari, A.; Peiro, M.M.; Kazemifard, N. 5G Implementation: Major Issues and Challenges. In Proceedings of the 2020 25th International Computer Conference, Computer Society of Iran (CSICC), Tehran, Iran, 1–2 January 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Dellaert, F.; GTSAM Contributors. GTSAM: Georgia Tech Smoothing and Mapping; Version: 4.2a8; Georgia Tech Borg Lab: Atlanta, GA, USA, 2022. [Google Scholar] [CrossRef]
- Bao, F.; Mazokha, S.; Hallstrom, J.O. MobIntel: Passive Outdoor Localization via RSSI and Machine Learning. In Proceedings of the 2021 17th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Bologna, Italy, 11–13 October 2021; pp. 247–252. [Google Scholar] [CrossRef]
- Ismail, M.; Mohamad, I.; Mohd Ali, M.A. Availability of GPS and A-GPS signal in UKM campus for hearability check. In Proceedings of the 2011 IEEE 10th Malaysia International Conference on Communications, Sabah, Malaysia, 11–13 October 2011; pp. 59–64. [Google Scholar] [CrossRef]
- Borio, D.; Sokolova, N.; Lachapelle, G. Doppler Measurements and Velocity Estimation: A Theoretical Framework with Software Receiver Implementation. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS), Savannah, GA, USA, 22–25 September 2009; pp. 304–316. [Google Scholar]
- Karfakis, P.T.; Couceiro, M.S.; Portugal, D.; Cortesão, R. UWB Aided Mobile Robot Localization with Neural Networks and the EKF. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 93–99. [Google Scholar] [CrossRef]
- Anjum, M.; Khan, M.A.; Hassan, S.A.; Mahmood, A.; Qureshi, H.K.; Gidlund, M. RSSI Fingerprinting-Based Localization Using Machine Learning in LoRa Networks. IEEE Internet Things Mag. 2020, 3, 53–59. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | 5G Positioning | NR5G-SAM | LIO-SAM |
|---|---|---|---|
| Prior | |||
| Post |
| Case | 5G Positioning | NR5G-SAM | LIO-SAM |
|---|---|---|---|
| Prior | |||
| Post |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karfakis, P.T.; Couceiro, M.S.; Portugal, D. NR5G-SAM: A SLAM Framework for Field Robot Applications Based on 5G New Radio. Sensors 2023, 23, 5354. https://doi.org/10.3390/s23115354
Karfakis PT, Couceiro MS, Portugal D. NR5G-SAM: A SLAM Framework for Field Robot Applications Based on 5G New Radio. Sensors. 2023; 23(11):5354. https://doi.org/10.3390/s23115354
Chicago/Turabian StyleKarfakis, Panagiotis T., Micael S. Couceiro, and David Portugal. 2023. "NR5G-SAM: A SLAM Framework for Field Robot Applications Based on 5G New Radio" Sensors 23, no. 11: 5354. https://doi.org/10.3390/s23115354