1. Introduction
The complexity of automotive systems is rapidly increasing due to the incorporation of advanced features and technologies. The automotive industrial sectors are currently confronted with massive difficulties originating from managing the increasing complexity of systems [
1]. As more devices become automated, the volume of embedded software is increasing at 10 to 20 percent per year, depending on the domain [
2]. As a result, the amount of software code required to operate these systems is also rapidly increasing. This increase in software code introduces a multitude of security risks that must be addressed to ensure the safety and reliability of the vehicle. These risks include potential vulnerabilities that could be exploited by attackers as well as unintended consequences resulting from complex interactions between system components. Xiong et al. [
3] collected and analyzed vulnerabilities and software weaknesses in vehicles from the National Vulnerability Database (NVD). The three most common types of vulnerabilities identified were protection mechanism failure, buffer errors, and information disclosure. Among these, the most frequent type of vulnerability was protection mechanism failure, which refers to instances where the vehicle fails to use or improperly uses a protection mechanism that can provide adequate defense against targeted attacks directed at the vehicle. To mitigate these risks, it is essential to accurately and rapidly identify system risks and match them to corresponding security requirements. This requires a comprehensive and systematic approach to risk identification and mitigation that takes into account the entire system architecture and all potential attack vectors. By leveraging advanced techniques such as threat modeling and formal verification, it is possible to gain a deeper understanding of the security risks associated with automotive systems and develop effective strategies for mitigating those risks.
In the current automotive industry, where there is a highly competitive environment and rapid iteration of new functions is required, it is necessary for software engineers to develop engineering code that meets a series of strict security requirements in order to accurately describe and identify threats and risks in complex systems. This requires software engineers to possess both professional coding abilities and a certain level of expertise in information security. However, it is currently unrealistic or significantly increases the human resources costs of original equipment manufacturers (OEMs). Therefore, a cybersecurity requirements management framework tailored to the automotive industry is needed, which can meet the complex threat and risk descriptions of security experts for high-complexity systems to achieve accurate risk identification and can also help software engineers obtain corresponding security requirements before code development to assist them in completing agile development.
Many studies have proposed their own solutions to address this issue. Predrag Filipovikj et al. [
4] proposed a pattern-based approach to formally describe security requirements, seeking successful industrial applications of security requirements engineering. The EAST-ADL (i.e., Electronics Architecture and Software Technology—Architecture Description Language) framework language was proposed in [
5] to describe the automotive domain in accordance with the ISO 26262 standard. In article [
6], a flexible model-driven engineering-based architecture named Flex-eWare was proposed for designing and implementing embedded distributed systems, allowing for relatively complete modeling of embedded distributed systems. However, some of these solutions fail to balance the precision of system threat modeling with the ease of use for software engineers, while others are not specifically designed for the automotive domain and are unable to perform targeted modeling and analysis of automotive domain communication protocols, among other issues.
In this paper, we have proposed a cybersecurity requirements management system (CRMS) as a security requirement analysis framework applied to the automotive industry. The ultimate goal of the CRMS is to assist security experts in OEMs in conducting comprehensive automated threat analysis and risk assessment of the entire system, as well as to help system development engineers obtain the necessary security requirements before implementing software development. In article [
7], a complete review of threat analysis and risk assessment methods for automotive systems is presented. This review mentions that the threat analysis and risk assessment methods in the automotive field are mainly divided into two categories: formula-based methods and model-based methods. Model-based methods mainly include Unified Modeling Language (UML) and Systems Modeling Language (SysML) methods, which have the advantage of being able to intuitively display components, communication channels, and attributes in the system, but the description of system details is not sufficiently detailed. Formula-based methods mainly include first-order logic-based methods and Markov decision processes (MDP), which have the advantage of being able to describe the system in detail at a finer granularity, but their learning cost is higher.
Meanwhile, in order to reduce the communication difficulty and time cost between system development engineers and security experts, our proposed cybersecurity requirements management system needs to provide secure interfaces that can adapt to the professional skills of both parties. System development engineers prefer to use graphical and concise descriptions of the system through the UML-based method in the model-based approach, requiring visual views that are easy to understand and use. Security experts, on the other hand, need to model the system more accurately and rigorously for security, enabling them to identify threats more precisely. It is easy to see that the advantages and disadvantages of the two methods of threat analysis and risk assessment described in article [
7] match the requirements and abilities of system development engineers and security experts. Therefore, our proposed approach is to allow system development engineers to use the UML-based method in the model-based approach, while security experts use the first-order logic based method in the formula-based approach based on the STRIDE (i.e., Spoofing, Tampering, Repudiation, Information disclosure, Denial of service, and Elevation of privilege) threat analysis model to model the system, and then translate and match between the two to achieve the goal of helping security experts conduct comprehensive automated threat analysis and risk assessment of the entire system and helping software development engineers obtain security requirements that should be added to the system before implementing software development.
Based on the above considerations, a framework for cybersecurity requirements management in the automotive domain called CRMS is proposed in this paper. The contributions of this paper can be summarized as follows:
An accurate and fast threat analysis and security requirements system called CRMS, suitable for complex large-scale automotive systems, is proposed;
A secure communication framework for the automotive domain, named the component channel messaging and interface (CCMI) framework, which can serve as a middleware for converting formal and informal representation methods, has been proposed;
The proposed approach is applied to an autonomous emergency braking (AEB) system. Its risk detection rate, coverage rates of security requirements, and analysis time were evaluated and compared with the HEAVENS method.
The rest of this paper is organized as follows:
Section 2 introduces the related work of security requirement management methods.
Section 3 introduces the concepts of first-order logic and the formal tool Alloy.
Section 4 presents the proposed framework for cybersecurity requirements management in the automotive domain.
Section 5 presents an illustration for applying the proposed CRMS framework to the autonomous emergency braking system. Finally,
Section 6 concludes this paper.
2. Related Work
There are now many studies on threat risk analysis and security requirements engineering. The methods of threat analysis and risk assessment are mainly divided into formula-based and model-based methods. Formula-based methods can be divided into asset-based methods, vulnerability-based methods, and attacker-based methods. Asset-based methods, such as the EVITA method (i.e., e-safety vehicle intrusion protected applications), evaluate the risk level of each asset in the system by performing an attack assessment and then assessing the potential level of risk that an attack could cause [
8]. However, such methods only provide evaluation techniques and do not offer a complete evaluation process. The HEAVENS (i.e., healing vulnerabilities to enhance software security and safety) method complements this limitation and is a suitable assessment method for evaluating information security risks in automotive electronic and electrical systems [
9]. The HEAVENS method first requires users to identify their security attributes and security goals and provide corresponding evaluation objects. Then, the Microsoft STRIDE threat analysis model is used for threat analysis. STRIDE associates threats with security attributes, and each type of STRIDE threat is statically mapped to a set of security attributes, including spoofing, tampering, repudiation, information disclosure, denial of service, and elevation of privilege, corresponding to authentication, integrity, non-repudiation, confidentiality, availability, and authority, respectively. Threats and evaluation objects are then categorized by considering both the threat level (TL) and impact level (IL) dimensions, leading to a security level classification. Finally, the four dimensions of threat, evaluation object, security attribute, and security level are integrated to form security requirements. Multi-metric approaches, such as SHIELD [
1,
10], evaluate the system’s level of security, privacy, and dependability by identifying multiple system configurations that meet established requirements. The SGM (i.e., security guide-word method) method, on the other hand, simplifies the identification of information assets and protection objectives, making it easy for non-security engineers to use [
11]. TVRA (i.e., threat vulnerability and risk analysis) defines the risk level of a system based on the probability of an attack occurring and the impact it could have on the system and can output a quantitative measure of system asset risk and a detailed set of security measures to minimize risk [
12]. Macher et al. [
13] proposed a method called SAHARA (i.e., security-aware hazard analysis and risk assessment), which incorporates the STRIDE threat model. Vulnerability-based methods, such as FMVEA (i.e., failure mode vulnerabilities and effects analysis) [
14], analyze a vulnerability’s potential to cause larger vulnerabilities or failures in the system. CHASSIS (i.e., combined harm assessment of safety and security for information systems) defines functionality, safety, and security requirements in two steps [
15]. ANP (i.e., analytical network process) is a matrix approach that can effectively consider dependencies and conflicts between attributes for joint evaluation [
16]. Attacker-based methods, such as SARA (i.e., security automotive risk analysis) [
17], conduct threat analysis and risk assessment based on the knowledge level of possible attackers, attack paths, attack motivations, and resources possessed. SAM (i.e., security abstraction model) [
18] combines safety management and model-based system engineering through an abstract description of automotive security modeling. The Bayesian Stackelberg game methodology models the attack and defense processes as a network security Stackelberg game [
19].
Model-based methods can be divided into graph-based methods and tree-based methods. Graph-based methods use nodes and directional edges to represent the system’s structure. The STRIDE model, which consists of six categories, namely spoofing, tampering, repudiation, information disclosure, denial of service, and elevation of privilege, has been widely used for threat analysis in software engineering [
20]. PASTA (i.e., process for attack simulation and threat analysis) [
21], a seven-stage threat analysis method, complements the STRIDE method. Markov chain methods can perform quantitative threat analysis, providing a more intuitive and convincing result for the entire system [
22,
23,
24,
25,
26]. The GTS (i.e., graph transformation system) method is a formal method of transforming the system structure graph, which can easily and quickly realize the conversion between the overall architecture and the module architecture [
27]. UMLsec (i.e., Unified Modeling Language Security), a UML extension, has been used for model-based security engineering in distributed information systems [
28,
29]. Shah et al. [
30] present a method of automatically creating a model transformation based on the original UML2Alloy transformation. Attack tree analysis, a tree-based method, uses a tree structure to represent the hierarchical relationships between nodes and has been widely used for threat analysis. The RISKEE (i.e., risk-tree) [
31] method calculates risk through forward propagation of frequencies and backward propagation of risk using the RISKEE propagation algorithm. Moreover, many studies have proposed improvements and extensions to existing methods, such as STPA-Sec (i.e., systems theoretic process analysis—security) [
32] and STPA-SafeSec (i.e., systems theoretic process analysis—safety and security) [
33]. The advantages and disadvantages of different relevant methods have been summarized in
Table 1.
Furthermore, Ansari et al. [
34] proposed a methodology named STORE for eliciting security requirements based on security threat analysis. This methodology includes the identification of four key points for effective security attack analysis: the point of attack, the point of belief, the point of conjecture, and the point of dependency. In addition, the article [
35] proposes a practical repository model for reusable security requirements that is user-friendly and understandable even for non-security experts. Mouratidis et al. [
36] presented a novel security modeling language and a set of original analysis techniques for capturing and analyzing security requirements for cloud computing environments. However, these approaches have not been adapted to the protocols used in the automotive industry and may not be directly applicable to security engineering in the automotive field. Bouskela et al. [
37] presented an integrated solution for formally defining system requirements and automating their verification through simulation. Kumar et al. [
38] proposed a supervised text categorization approach for automatically extracting and classifying non-functional requirements. However, these methods require a high level of expertise and may be challenging for software developers with limited knowledge of cybersecurity. Therefore, there is an urgent need for a network security requirement analysis and management framework in the automotive industry that can address all of these pain points.
3. Preliminaries of Proposed Approach
3.1. First-Order Logic
First-order logic, also known as first-order predicate calculus, is a branch of mathematical logic that deals with logical systems based on objects, properties, and relations. In first-order logic, there is a set of objects, and these objects can be assigned properties and related to each other. It can be used to describe complex propositions in natural language and provide tools and methods for analyzing and proving these propositions.
The language of first-order logic can be represented by a set of symbols, including constants, variables, predicates, functions, and logical symbols. Constants are symbols that represent fixed objects; variables are symbols that represent any object. Predicates represent relations or properties, and functions map a set of objects to another set of objects. Logical symbols include negation, conjunction, disjunction, implication, biconditional, and quantifiers.
First-order logic has the following characteristics:
Precision: First-order logic is a precise mathematical language that can describe complex problems and various relationships clearly and accurately;
Completeness: First-order logic is a complete language that can describe any countable thing or relationship;
Natural expression: First-order logic has a natural expression form that can express and understand complex problems and relationships in a human-readable form;
Computability: First-order logic has computability and can perform automatic reasoning and proof through computers;
Scalability: First-order logic has high scalability and can handle new problems and domains by adding new symbols and rules;
Wide application: First-order logic is widely used in formal language, formal proof, and formal methods, especially in computer science, artificial intelligence, and human-computer interaction.
By using first-order logic, the accuracy and precision of problems can be improved, the difficulty of reasoning and proof can be reduced, the efficiency of computer automatic reasoning can be improved, and more reliable and effective solutions can be provided in various fields.
3.2. Alloy
Alloy is a formal modeling language and analyzer that is widely used in industry and academia to model and analyze complex systems, particularly in the context of safety and security-critical applications. Alloy’s main advantage over traditional modeling and analysis tools is its ability to integrate high-level, declarative modeling with formal, precise reasoning using first-order logic.
At its core, Alloy is a language for describing abstract models of systems in a way that is both intuitive and precise. The language is based on a subset of predicate calculus, which is a formal language for expressing logical statements about sets and their elements. In Alloy, models are expressed as collections of sets and predicates, which describe the relationships and constraints that govern the behavior of the system.
One of the main advantages of Alloy is its ability to automatically generate and explore the space of possible models that satisfy a given set of constraints. The Alloy analyzer, which is a tool for analyzing Alloy models, uses a SAT solver to explore the space of possible models up to a certain depth or bound and returns a counterexample if the constraints are not satisfied. The analyzer can also generate visualizations of the models and counterexamples, which can help in debugging and understanding the model.
The integration of Alloy with first-order logic provides several advantages over traditional modeling and analysis tools. First, it allows the user to express complex, abstract models in a high-level, declarative way while still being able to reason about their properties using the precise, formal language of first-order logic. This makes it easier for the user to understand and reason about the model, as well as to communicate it to others. Second, it allows the user to take advantage of the powerful tools and techniques developed for first-order logic, such as automated theorem proving and deductive reasoning, to verify the properties of the model.
Alloy’s ability to generate counterexamples is also a powerful tool for detecting design flaws and potential security vulnerabilities in complex systems. By automatically exploring the space of possible models and returning counterexamples when the constraints are not satisfied, Alloy provides a systematic way to check the correctness of the model and identify potential problems. This makes it a valuable tool for modeling and analyzing safety and security-critical systems, where even small design flaws or errors can have catastrophic consequences.
Overall, Alloy is a powerful tool for modeling and analyzing complex systems, particularly in the context of safety and security-critical applications. Its integration with first-order logic provides a formal, precise language for reasoning about the model, while its high-level, declarative syntax makes it easier to specify and understand complex models. The Alloy analyzer provides an automatic solver that greatly reduces the need for the user to manually explore the search space, as well as a counterexample generator and a graphical visualization tool that help in debugging and understanding the model.
Alloy’s ability to integrate high-level modeling with formal, precise reasoning using first-order logic is a key advantage that sets it apart from traditional modeling and analysis tools. By providing a systematic way to check the correctness of the model and identify potential problems, Alloy is a valuable tool for modeling and analyzing safety and security-critical systems.
5. Illustration
Autonomous emergency braking (AEB) is an advanced driver assistance system (ADAS) that automatically applies the brakes of a vehicle to prevent or mitigate a collision. AEB is a key feature of intelligent connected vehicles (ICVs), as it can significantly reduce the risk of crashes and save lives. With the increasing adoption of ICVs, AEB has become a critical technology for enhancing passenger safety. Its main architecture is shown in
Figure 3. AEB systems use a variety of sensors, such as radar, lidar, and cameras, to detect potential collisions with other vehicles, pedestrians, or obstacles. When a collision is imminent, the system can automatically apply the brakes to avoid or reduce the severity of the impact. AEB is particularly effective at preventing or mitigating rear-end collisions, which are among the most common types of crashes.
Despite its potential to improve passenger safety, AEB also poses significant information security threats. The sensors used in AEB systems are vulnerable to a variety of attacks, including jamming, spoofing, and replay attacks. An attacker could use these attacks to manipulate the sensor data and cause the AEB system to apply the brakes unnecessarily or not apply them when needed. This could lead to accidents or create opportunities for other types of attacks. Furthermore, the AEB system is also vulnerable to software and firmware attacks, which could be used to exploit vulnerabilities in the system and compromise its security. An attacker could gain unauthorized access to the system and modify its behavior, potentially causing harm to passengers or other road users.
To address these threats, it is essential to conduct a thorough security analysis of AEB systems and implement appropriate security measures. This could include the use of secure communication protocols between the various components of the AEB system, the integration of intrusion detection and prevention systems, and the adoption of secure software development practices. Additionally, regular security testing and maintenance should be conducted to ensure that the AEB system remains secure and effective.
In our AEB system, vehicles are able to detect the distance and movement speed of different obstacles in front of them through cameras, lidar, and radar and transmit the monitored data to the ADAS domain controller through different communication channels after preprocessing the data internally. A camera is a sensor that captures images of the environment in front of the vehicle and is typically used for object detection, recognition, and tracking. The images captured by the camera are usually transmitted to the ADAS domain controller via LVDS. Lidar, on the other hand, uses laser beams to measure distances to objects in the environment and is useful for generating a 3D map of the environment around the vehicle. Due to the large amount of data generated by the Lidar, Ethernet is used for data transmission between the Lidar and the ADAS domain controller. Radar is a sensor that uses radio waves to detect the presence of objects in the environment and is useful for detecting objects in adverse weather conditions. Since the data generated by radar is usually small, the CAN FD communication method can meet the requirements. After receiving the heterogeneous data from the three sensors, the ADAS domain controller performs data fusion and, based on this, carries out path planning and final motion control decisions. The final control signals of the ADAS domain controller will be sent to the central gateway and then forwarded to the corresponding motion control ECUs, such as EPS, EM, and BCM, through the corresponding domain controller to achieve the corresponding vehicle longitudinal and lateral control, thus realizing the emergency avoidance of the AEB system to avoid collision. At the same time, the central gateway also sends the motion decision signals and warning signals of the ADAS domain controller to the IVI for display on the vehicle screen, making it convenient for the driver to view and warn. If an emergency occurs and the AEB system is triggered for emergency avoidance, the central gateway will also send the emergency signal to the TSP cloud through TBox to remind the OEMs and related departments to take emergency measures, ensuring the safety of passengers’ lives.
Based on the AEB system architecture diagram and communication signals, we can identify the assets in the AEB system. The threat analysis and risk assessment process in ISO/SAE 21434 defines a method for asset identification in the AEB system. In this example, assets in the AEB system are defined and classified into components, channels, messaging, and interfaces according to the CCMI communication model. The defined CCMI components are listed in
Table 3, the defined CCMI channels are listed in
Table 4, the defined CCMI messaging is listed in
Table 5, and the defined CCMI interfaces are listed in
Table 6.
Then, the assets identified in the CCMI communication model are represented using EMF in the Eclipse IDE. Firstly, the AEB system is defined using UML diagrams in EMF. Due to the size of the AEB system, it is not possible to fully display the details of the UML diagrams in EMF.
Figure 4 shows the AEB Class UML Diagram, which represents the CCMI model and its instances in the system. After modeling the AEB system using UML in EMF, the ‘Generate Model Code’ function in the ‘.genmodel’ file of EMF is used to automatically generate Java model code using the CCMI communication model framework. Then, the Python-based translation engine is used to convert the Java file to Alloy file code using the mapping method provided in
Table 2, resulting in an AEB system model defined in the Alloy language.
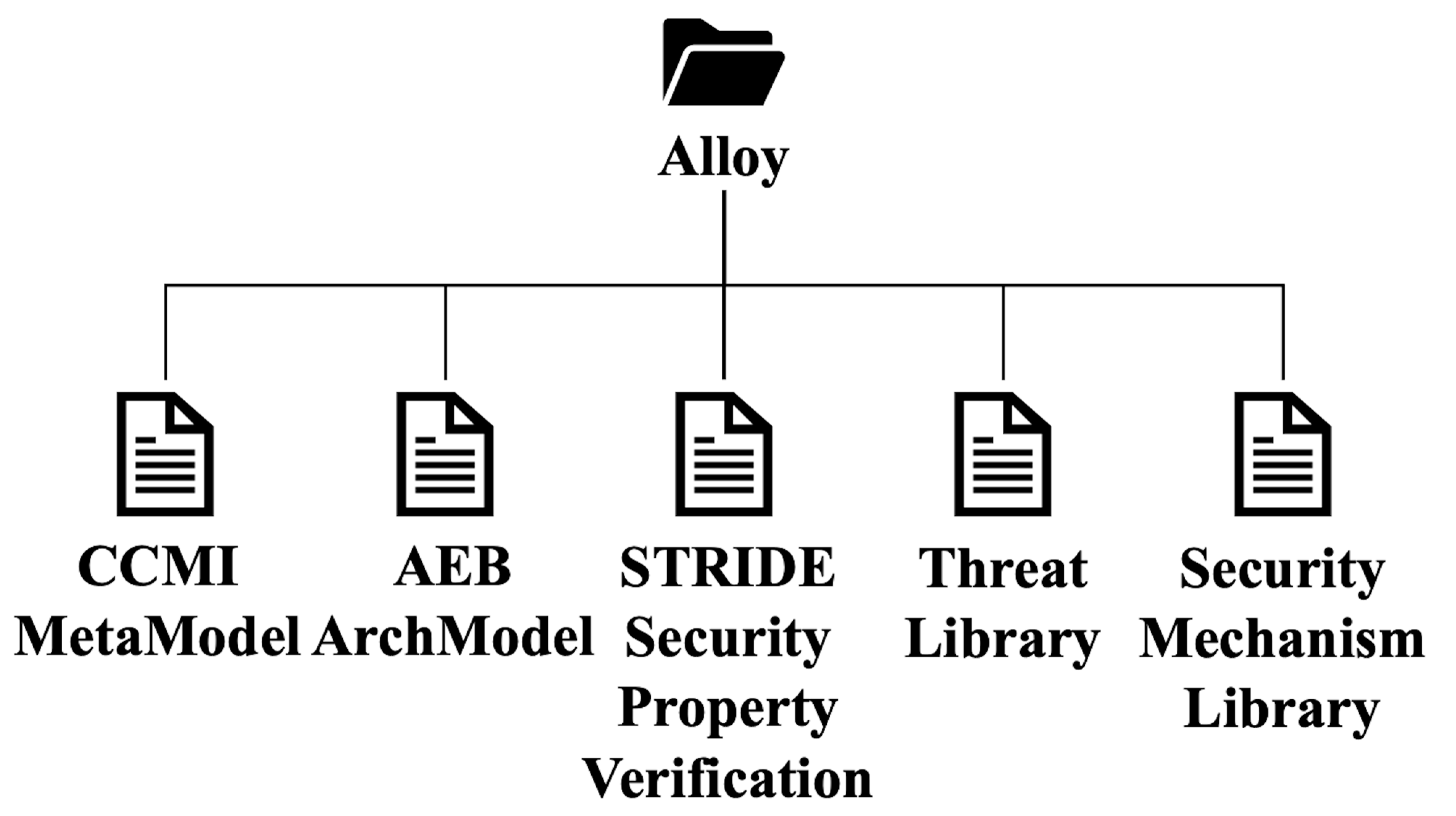
The generated Alloy system model consists of five files, as shown in
Figure 5. The file named ‘CCMI MetaModel’ contains the definitions of the four metamodels of the CCMI communication model, while the ‘AEB ArchModel’ file defines the instances of the CCMI model for the AEB system. These two files can be obtained by translating the Java model into EMF using the translation engine. This way, we can complete the AEB system modeling using the Alloy language. At the same time, the translation engine will also enumerate the instances of the AEB system’s CCMI model in the ‘STRIDE Security Property Verification’ file for later automated risk identification and traversal. The ‘Threat Library’ and ‘Security Mechanism Library’ files are the formal Threat Library and Security Mechanism Library established by the security experts using the Alloy language based on their previous security experience. By matching the elements in the CCMI communication model of the AEB system with the Threat Library and Security Mechanism Library in the ‘STRIDE Security Property Verification’ file, we can obtain the threats and risk points in the AEB system, as well as the corresponding security mechanisms and security requirements. This enables automated identification of system threats and risk points and provides corresponding security requirements.
With the aforementioned file structure of the Alloy system, we can perform threat analysis and risk assessment based on the STRIDE threat model for assets in the system. We have established two libraries, namely the threat library and the security mechanism library, which match threats and security mechanisms with asset attributes in the libraries. In the ‘STRIDE Security Property Verification’ file, the asset attributes of AEB instances in the ‘AEB ArchModel’ file are traversed and matched with the threat and security mechanism libraries using Alloy’s ‘
asset’ and ‘
check’ syntax. If a counterexample is found during the search, indicating that the asset matches the threat and is at risk of attack, the output will show ‘
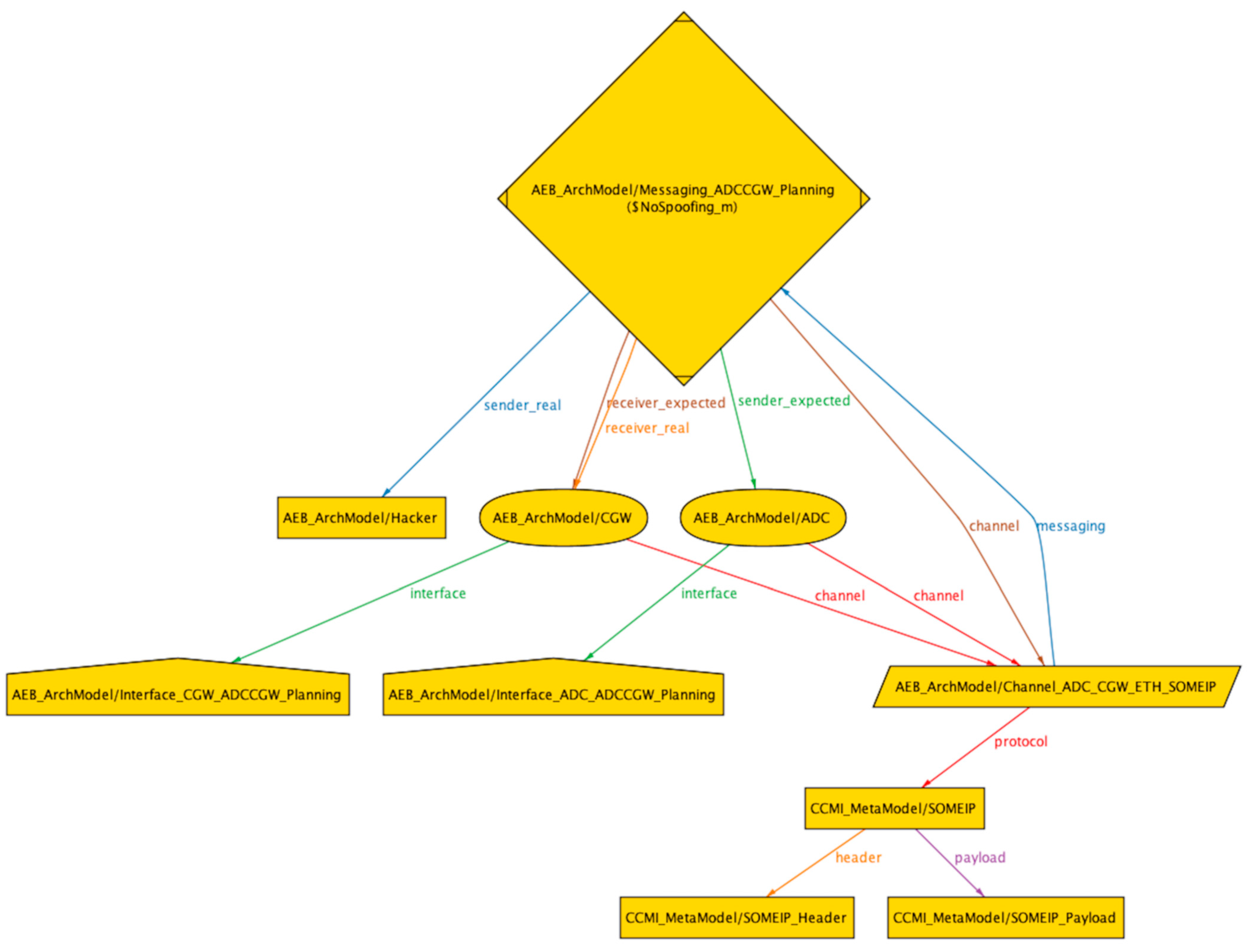
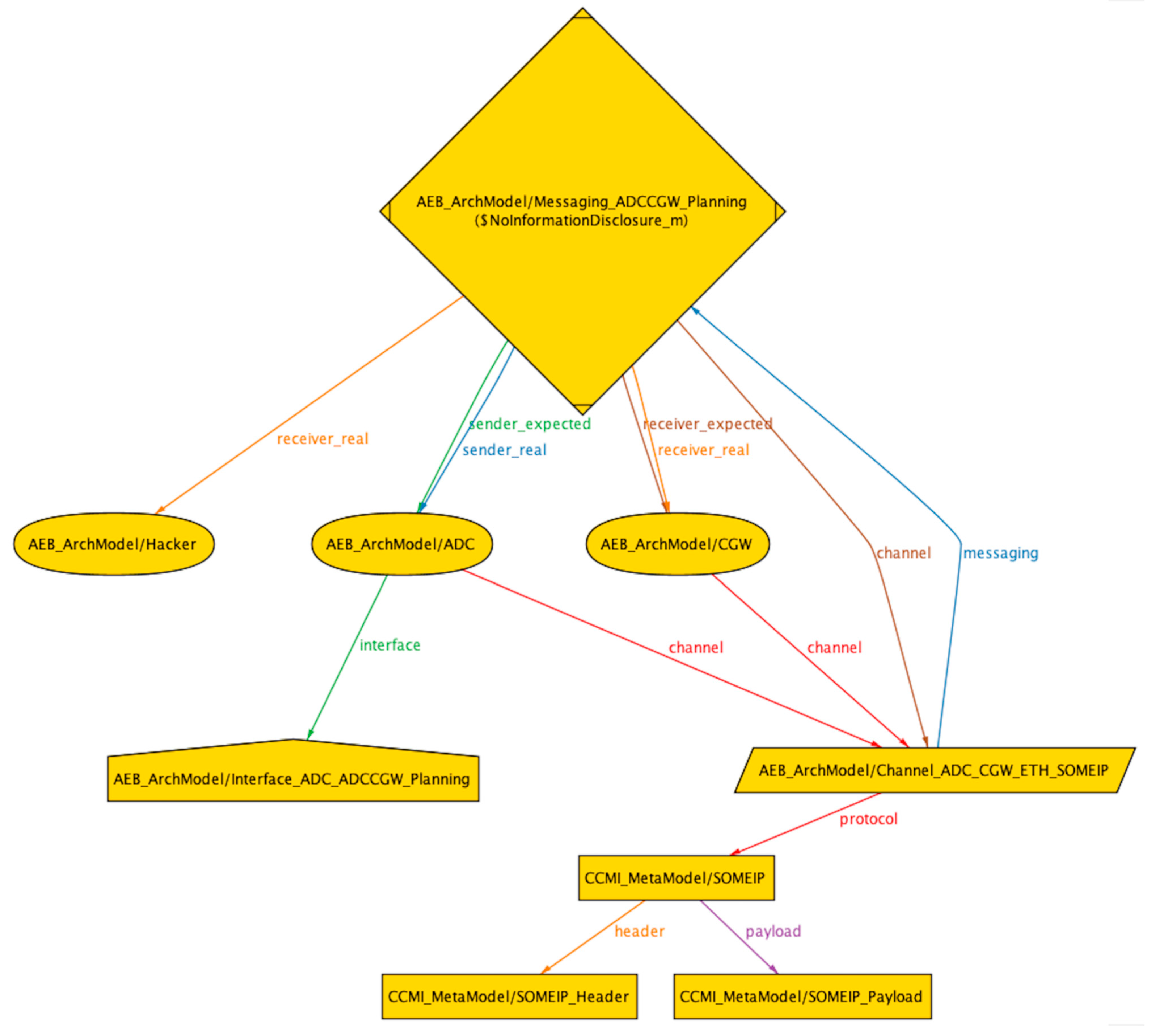
Counterexample found’. If a security requirement from the security mechanism library is enabled and the threat can no longer be matched to the asset, it means that the security requirement is matched with the threat and thus provides an automated mechanism for matching asset threats and security mechanisms. In this article, we provide graphical representations of counterexamples matched to three typical threats, namely spoofing, tampering, and information disclosure. The algorithm for checking the spoofing threat is given in Formula (6), and the visualization of the counterexample is shown in
Figure 6. The algorithm for checking the tampering threat is given in Formula (7), and the visualization of the counterexample is shown in
Figure 7. The algorithm for checking the information disclosure threat is given in Formula (9), and the visualization of the counterexample is shown in
Figure 8.
The AEB system, as a critical function in intelligent connected vehicles, involves multiple system components and has high system interdependence. Therefore, the threat analysis and risk assessment process for the AEB system is quite lengthy and complex. After conducting a comprehensive analysis of the AEB system, we obtained the final experimental results. To evaluate the superiority of the formalized and automated threat analysis and risk assessment method proposed in this paper for the CRMS system, we compared this method with the HEAVENS threat analysis and risk assessment method. The HEAVENS method provides a systematic approach and a complete evaluation process, allowing threat modeling and assessment to be applied throughout the entire software development cycle. Its structured approach enables rapid identification of security issues, improving the manageability and efficiency of system security. As a result, the HEAVENS method is recommended in international regulations for vehicle information security, such as SAE J3061, and has been widely used in threat analysis and risk assessment activities by major OEMs and their suppliers in the automotive industry. In addition, the HEAVENS method uses the STRIDE threat model in its threat analysis process, which is consistent with the threat analysis model in the CRMS framework proposed in this paper. This enables a direct comparison of threat detection rates and coverage rates of security requirements for the six types of threats, making the experimental results of this paper more convincing. Therefore, the HEAVENS method was chosen to be compared with the CRMS method proposed in this paper.
Firstly, the threat analysis and risk assessment processes require accurate identification of corresponding threats. Failure to identify threats in the system can lead to the existence of many vulnerabilities, thereby increasing the possibility of attacks on the system. Therefore, the first step is to evaluate whether the threat detection rates of the evaluation method can be improved. We used the two methods mentioned above to perform threat analysis and risk assessment on the AEB system and compared their results with known threats in the real system. The results of threat detection rates are shown in
Figure 9. It can be seen that the threat detection rates of the proposed method are higher than the HEAVENS method in spoofing, tampering, and information disclosure, all exceeding 92%. The detection rates for spoofing threats reached 97%, which is a 7% improvement over the HEAVENS method. Since spoofing is a common threat in automotive systems, this improvement can help OEMs detect more spoofing threats, thereby effectively improving the overall cybersecurity of vehicles. Moreover, the detection rate for information disclosure threats increased from 86% to 92%, which is a 6% increase compared to the HEAVENS method. As another common threat in vehicle systems, identifying more confidential information leakage risks more accurately means that OEMs can block many malicious attacks on vehicles from the source, greatly reducing the attack surface of vehicles and the feasibility of other threats. However, the threat detection rates for denial of service and elevation of privilege are slightly lower than the HEAVENS method but still within an acceptable range.
After the system detects threats and risks, it is necessary to provide corresponding security requirements to mitigate the identified threats and risks. If the system can detect threats and risks but cannot provide appropriate security requirements, or if the given security requirements cannot mitigate the identified threats and risks, then the system has not achieved the desired effect. Therefore, we evaluated the ability of the system to match security requirements to identified threats and risks using the coverage rates of security requirements. The results are shown in
Figure 10. It can be seen that the coverage rates of security requirements of the method proposed in this paper are higher than those of the HEAVENS method in spoofing, tampering, repudiation, and information disclosure. Especially, the coverage rates of spoofing, tampering, and information disclosure are 98%, 99%, and 98%, respectively. We believe that security requirements with coverage rates like these are already suitable for practical applications. Spoofing, tampering, and information disclosure are three common threats in automotive systems. Improving the coverage rates of security requirements for these three threats is of great significance. This means that once the system successfully identifies these three threats, it can automatically match them with corresponding effective security measures, thus achieving a timely and effective defense against them. Additionally, accurately and correctly matching security measures for identified threats can effectively defend against almost all identified threats and risks at the conceptual stage, thereby avoiding product iteration caused by the discovery of new threats and risks in subsequent development and testing phases. This can greatly reduce OEMs’ costs of repetitive development in terms of both money and time.
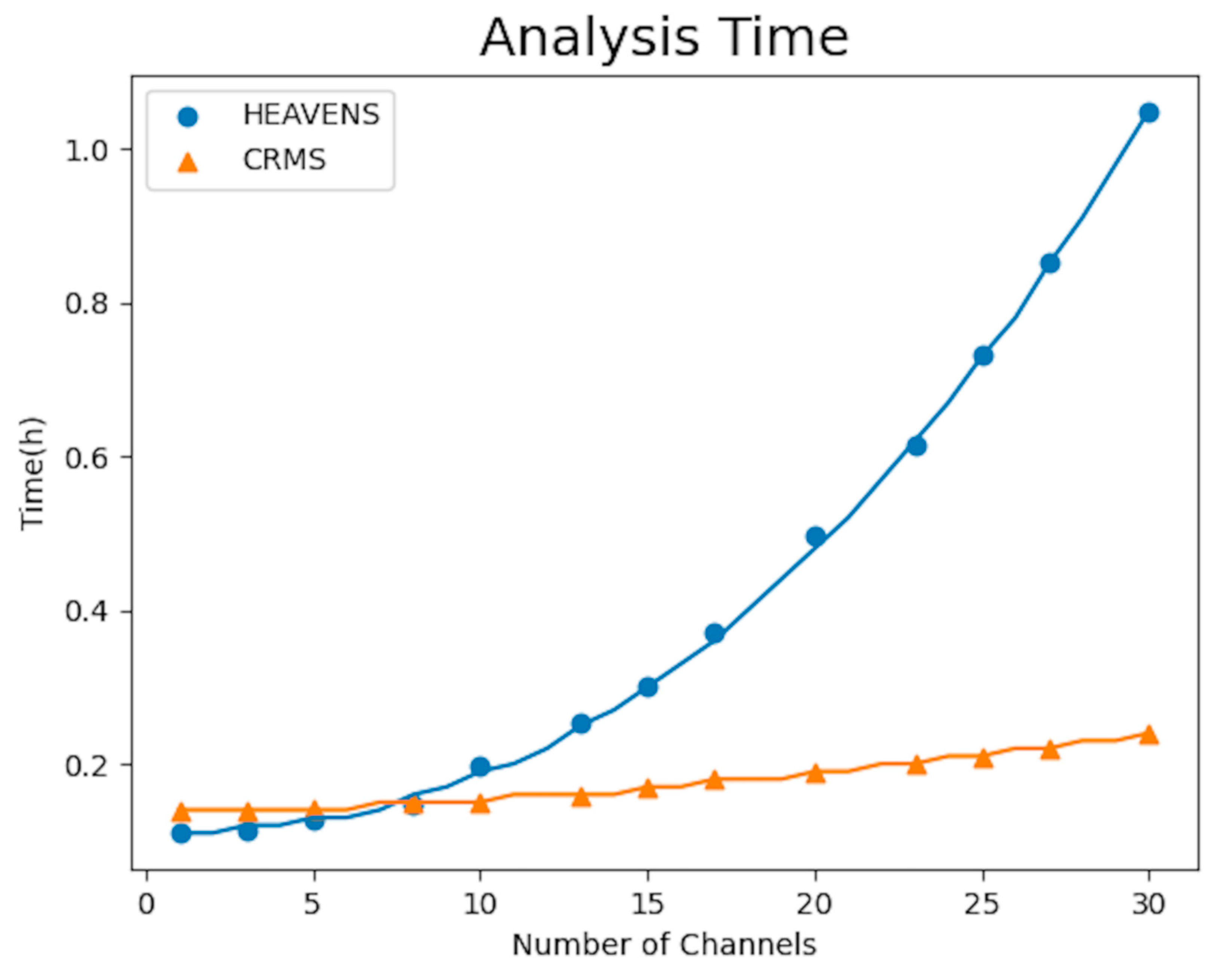
In addition, a significant advantage of the proposed method is its automation, which can help companies save time and money when conducting threat analysis and risk assessment on their systems. In order to assess the efficacy of the automated threat analysis and risk assessment approach proposed in this study, a comparative analysis was performed between the proposed method and the HEAVENS method for threat analysis and risk assessment in systems with varying numbers of channels. The time required for these analyses was used as the performance metric. The number of channels in a system can represent its complexity, and we fitted the experimental results to obtain the relationship between the analysis time and system complexity. The results are shown in
Figure 11. As shown in
Figure 11, when the system is relatively simple, the proposed method in this paper requires slightly more time than the HEAVENS method, mainly due to the need to use UML to model the system with CCMI. However, as the system complexity increases, at around 8 channels, the analysis time required by the proposed method is lower than that required by the HEAVENS method. Moreover, as the system complexity further increases, the growth curve of the analysis time required by the proposed method remains slow, while the HEAVENS method shows a significant increase in analysis time. Therefore, the proposed automated method can save more time compared to the HEAVENS method, and the efficiency advantage of the proposed method in this paper becomes more apparent. In conclusion, the proposed automated method in this paper has a more significant effect on reducing the time cost of threat analysis and risk assessment in large and complex systems, and this effect becomes more apparent as the system complexity increases.
6. Conclusions
In this paper, we have proposed a cybersecurity requirements management framework for the automotive domain. This method can help security experts transform their security expertise into formal language using the Alloy tool and establish a formal threat and security requirement library. Moreover, software development engineers can quickly model systems in UML form by using the EMF framework in this method. By using the CCMI communication framework proposed in this method, formal and informal models can be mapped, helping software development engineers obtain corresponding security requirements before developing code and assisting security experts in quickly and accurately identifying system risks in bulk. The case study in this paper demonstrated that our proposed approach outperforms the commonly used HEAVENS approach in terms of threat detection rates and coverage rates of security requirements. The proposed method exhibits higher rates of threat detection than the HEAVENS method across the categories of spoofing, tampering, and information disclosure, all surpassing 92%. In particular, the rate of detection for spoofing threats reached 97%. The comparison of the coverage rates of security requirements between the proposed method and the HEAVENS method indicates that the former outperforms the latter in the categories of spoofing, tampering, repudiation, and information disclosure. Notably, the coverage rates for spoofing, tampering, and information disclosure reach 98%, 99%, and 98%, respectively. Our method is more efficient in terms of threat analysis time for large-scale complex systems with more than 8 channels, and its effectiveness becomes more prominent with the increasing complexity of the system.
In the future, we plan to extend our framework to analyze larger and more complex automotive systems. Additionally, we will perform more adaptation work for the latest communication protocols, such as time-sensitive networking (TSN) and industry-specific standards like Diagnostics over Internet Protocol (DoIP), to make our architecture more comprehensive in adapting to the automotive industry. These identified threats and security requirements will be added to our formalized threat and security requirements library, making our proposed framework more comprehensive in identifying security risks and performing accurate matching in the system. We also plan to compare our method’s performance with other industry methods, such as SAHARA, to further validate the superiority of our approach. Moreover, we will continue to improve our method, making it more automated and efficient and adding functionality to generate risk reports for building an integrated system. In addition to identifying all the risks in the system and matching them with the corresponding security requirements using Alloy, we will also generate a comprehensive system risk assessment report. This report will provide detailed information on the identified risks, their potential impact, and recommendations for mitigating them. Furthermore, since the Alloy tool is open-source, the risk assessment report generation feature will be integrated into the tool as a plugin, which will enable users to quickly and easily generate risk assessment reports. This will enhance the usability and agility of the framework, making it an ideal choice for conducting system risk assessments in the automotive domain.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}