
The Development of an Energy Efficient Temperature Controller for Residential Use and Its Generalization Based on LSTM
 ,
,  and
and 
Abstract
:1. Introduction
2. Theoretical Aspects of Heat Transfer Inside Residential Buildings
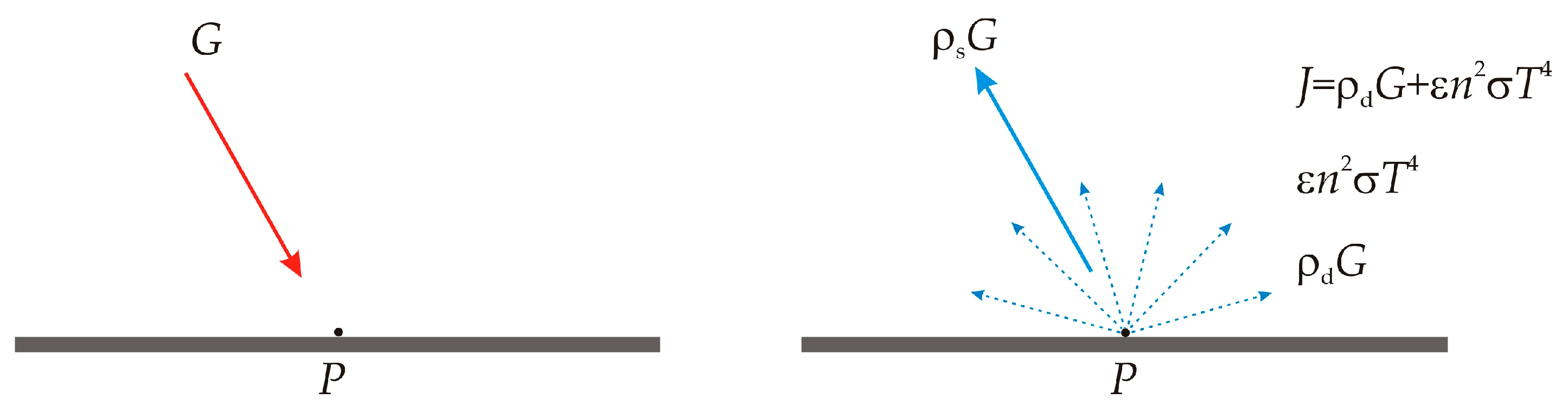
2.1. Radiative Heat Flux in the Case of Opaque Surfaces
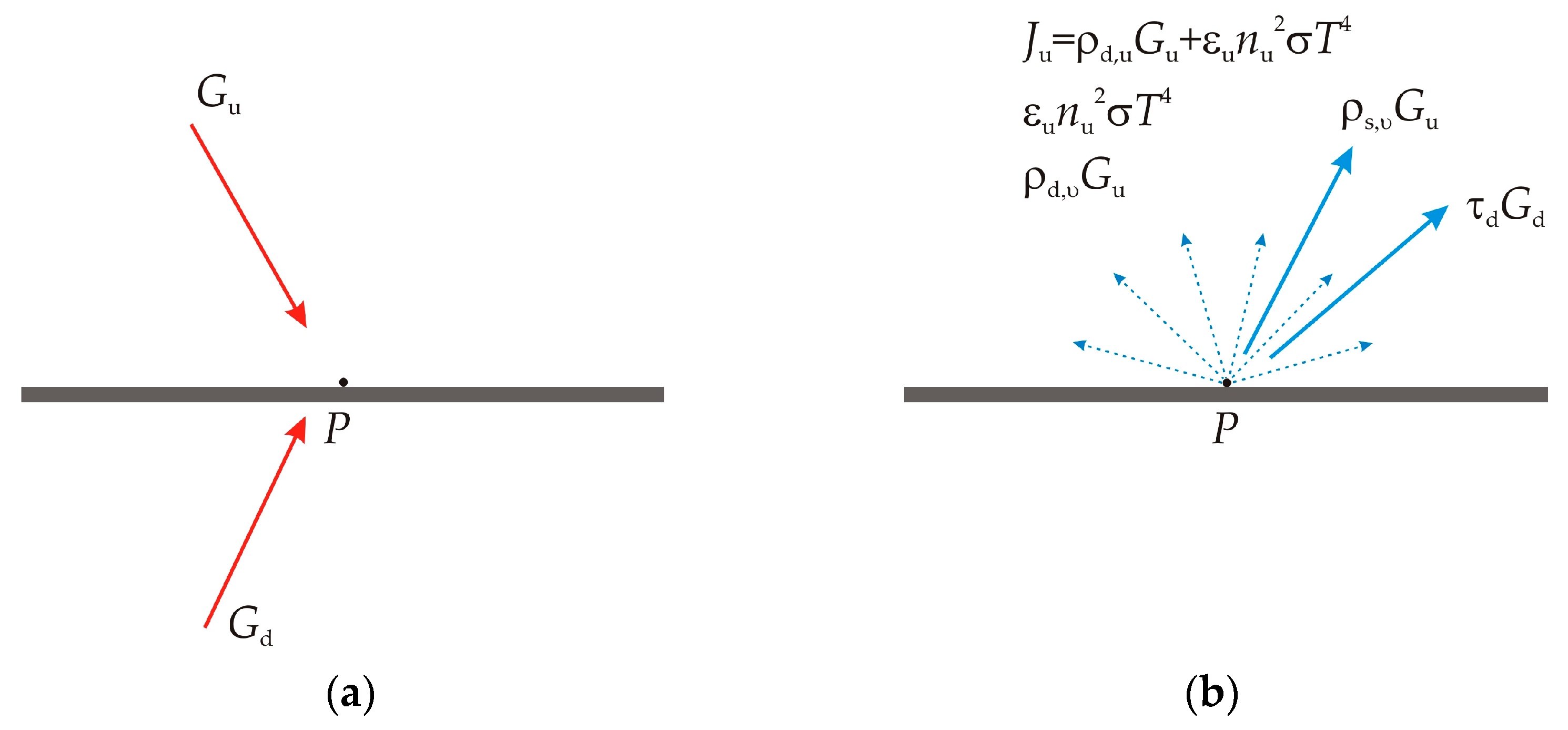
2.2. Radiative Heat Flux in the Case of Semi-Transparent Surfaces
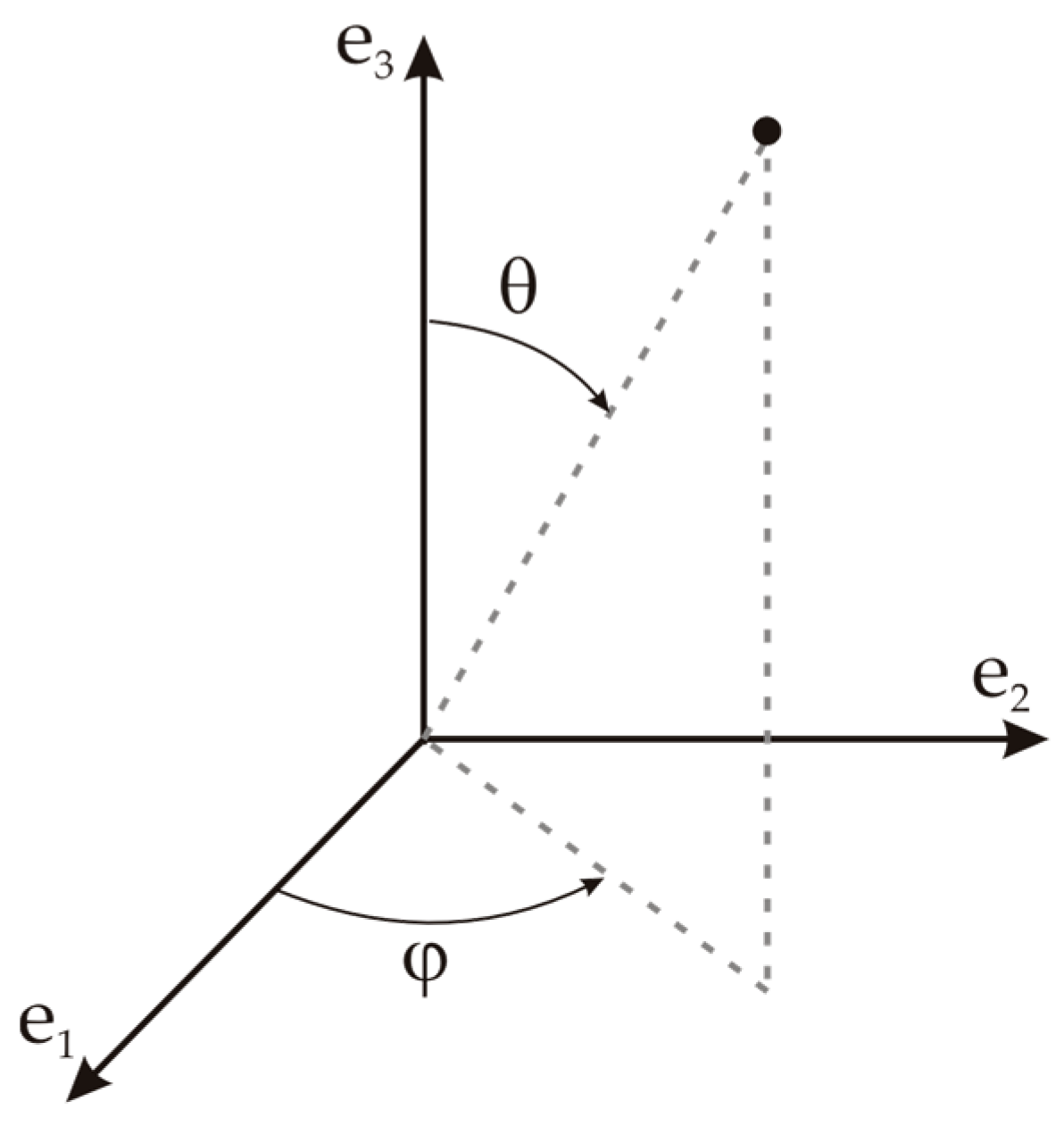
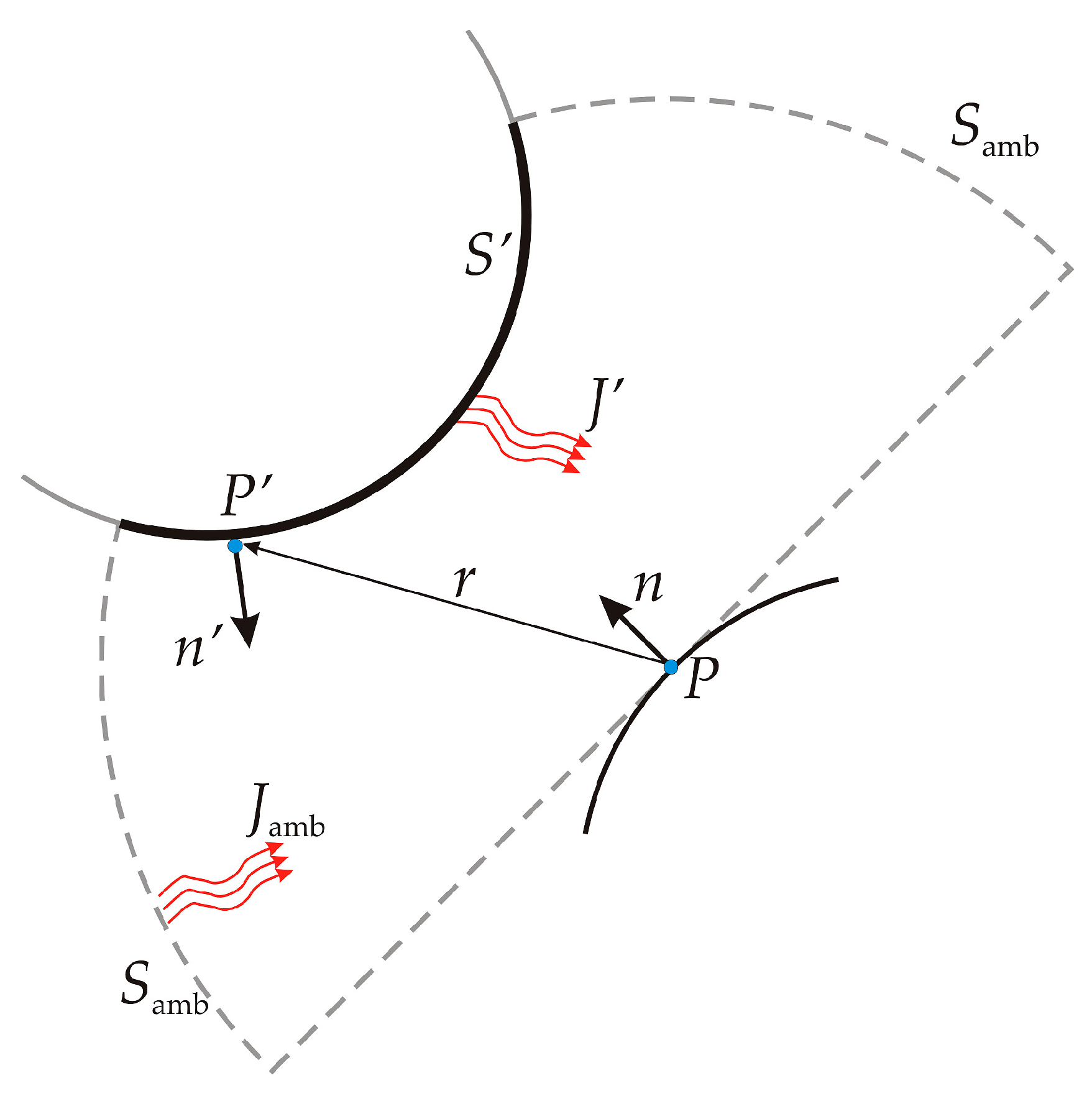
2.3. Evalation of the View Factor
3. Materials and Methods
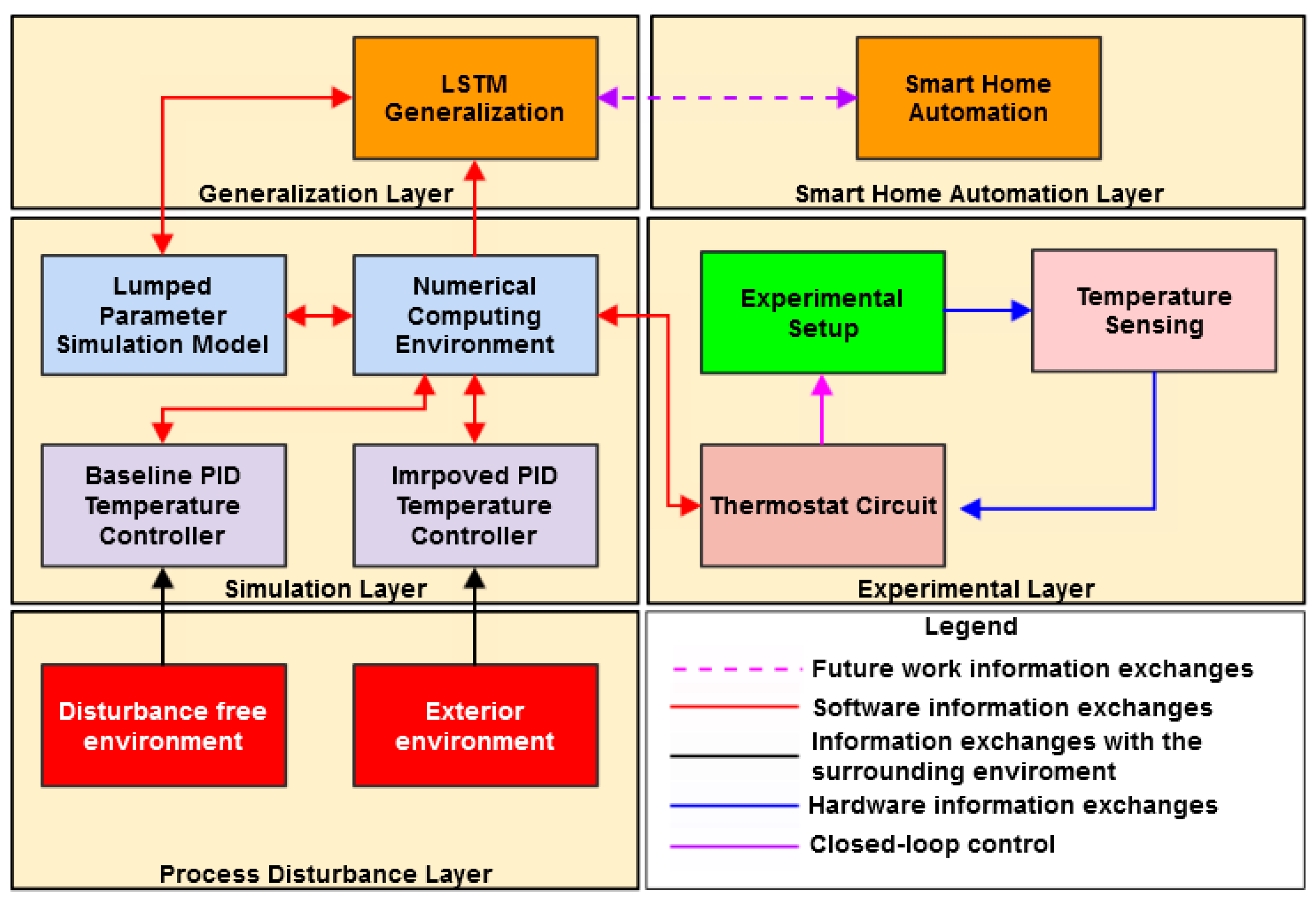
3.1. A Schematic Representation of the Proposed Approach
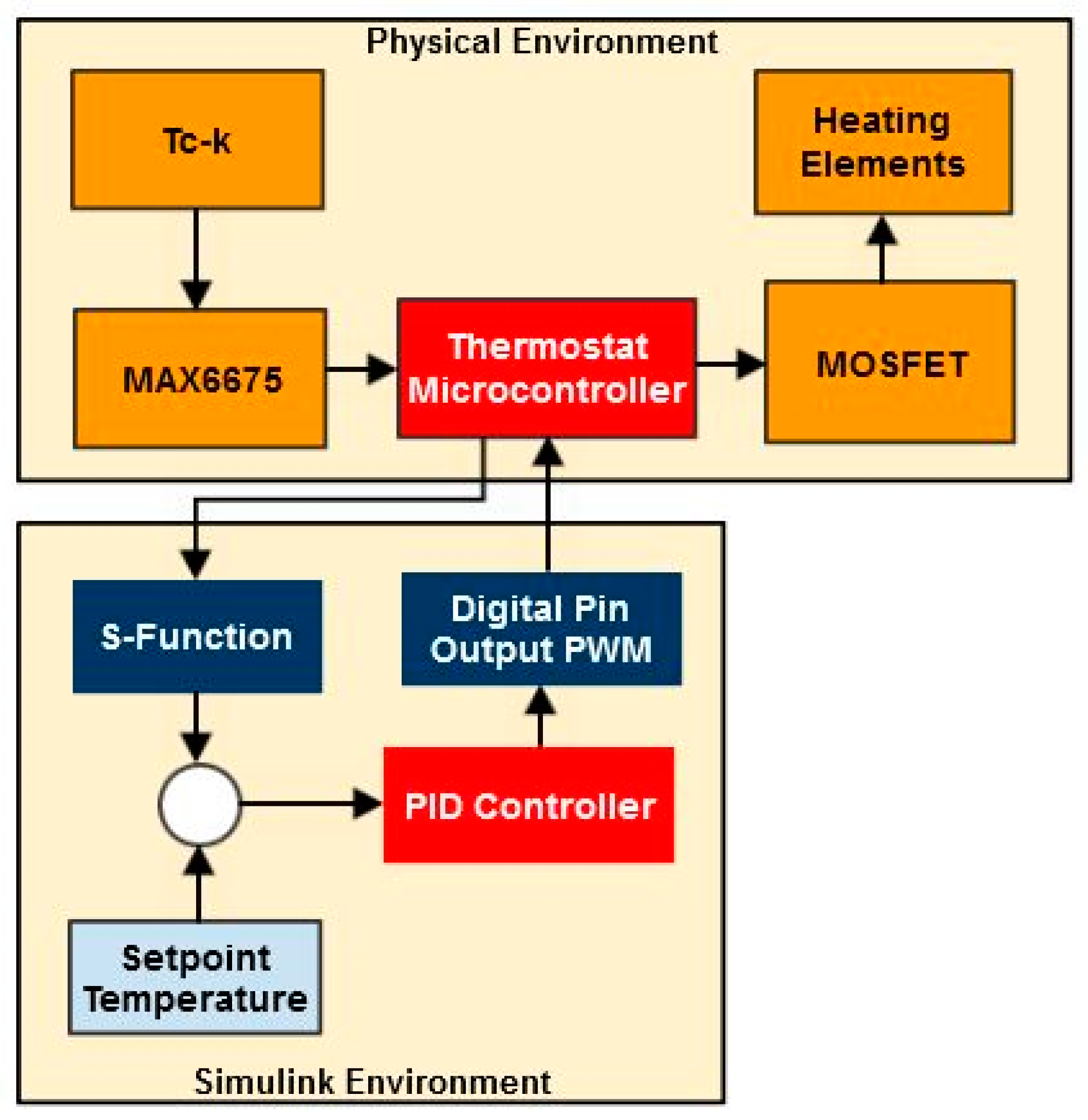
- The experimental layer stands at the core of the approach, comprising a laboratory scale experimental setup that is employed for capturing both the heat transfer and temperature control problems of interior spaces that are found in residential buildings. In this regard, temperature sensing hardware and a thermostat circuit are included. The interaction between the two materializes a closed-loop controller;
- The simulation layer includes the software that is required for modeling the plant (the combination between the experimental setup and its heating system) by means of a lumped parameter simulation model. Experimental data is used for parameterizing the conductance and capacitance of the fluid domain that is found in the interior space of the enclosure. A numeric computing environment is employed for developing and tuning a PID temperature controller. This objective is achieved at first in a disturbance free environment and then by repeating the experiments in the exterior for one month. The conductance and capacitance of the fluid domain are adjusted to account for process disturbances due to weather conditions. Thus, an improved control methodology can be achieved;
- The process disturbance layer materializes two physical environments: one interior environment that is characterized by no disturbing factors (i.e., temperature variations or fluctuating heat transfer due to forced convection) and the exterior environment that is subjected to process disturbances due to the weather conditions. Both environments are used for developing and tuning an adequate control methodology;
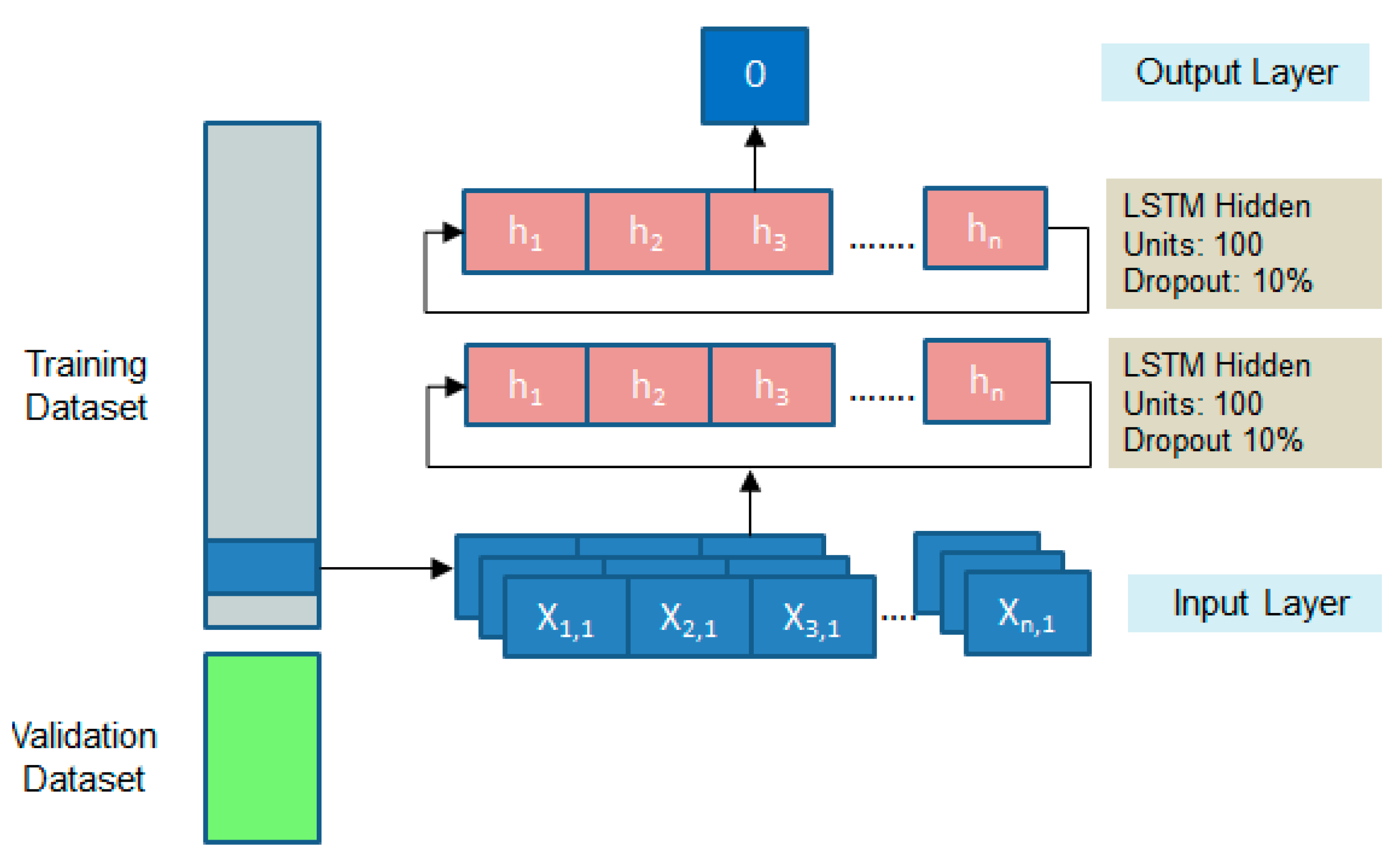
- The generalization layer: the knowledge gained throughout the research can be encompassed in sequential data that characterizes the response of the improved control methodology when subjected to process disturbances. Thus, a LSTM recurrent neural network can be employed to generalize the behavior of the controller for any given scenario;
- The smart home automation layer: machine learning is a constitutive part of smart home automation. Thus, the LSTM model developed in the previous layer can interact with such domestic systems. Furthermore, multiple features can be included in the supervised learning process for widening the sources of process disturbances.
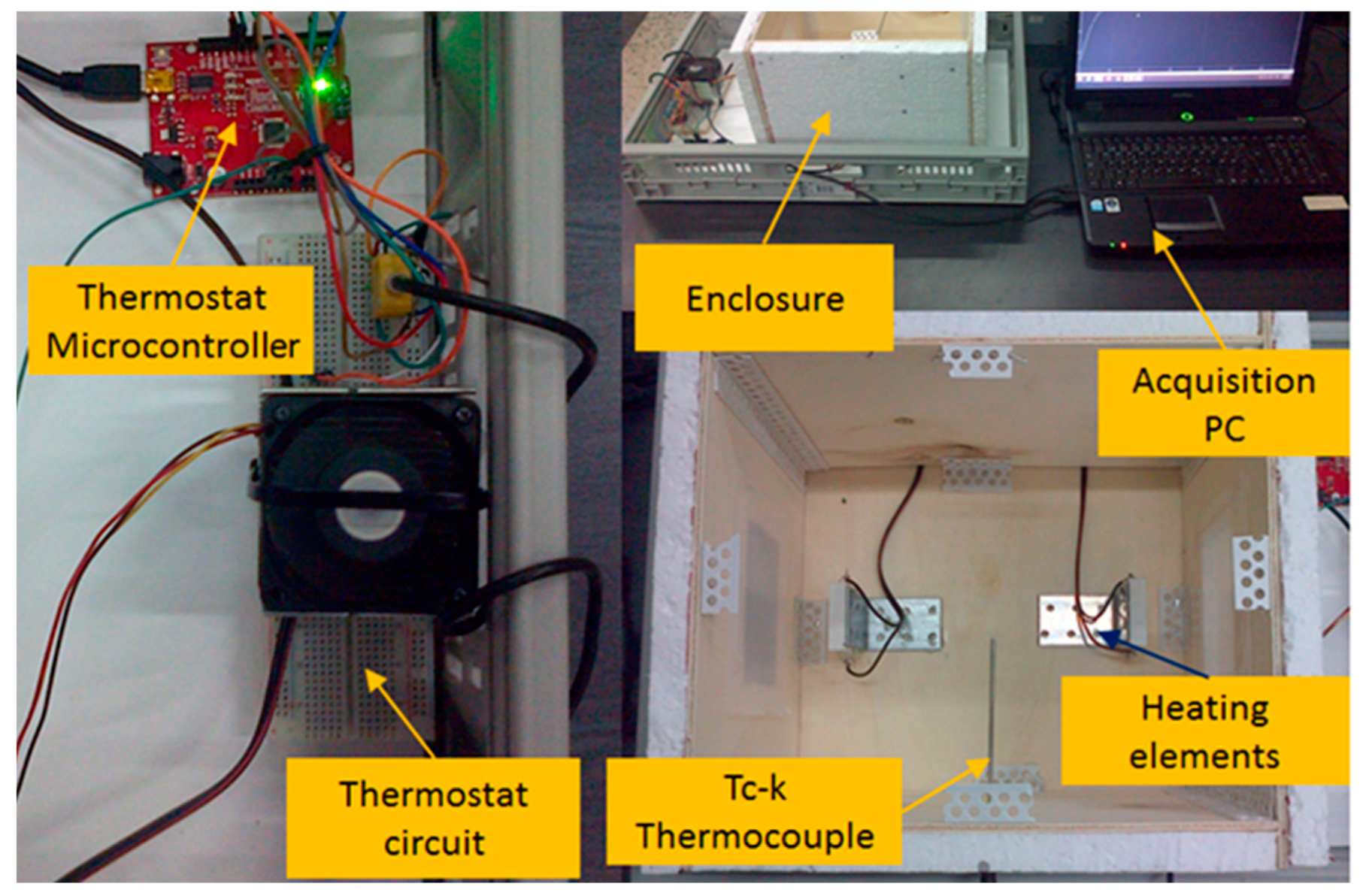
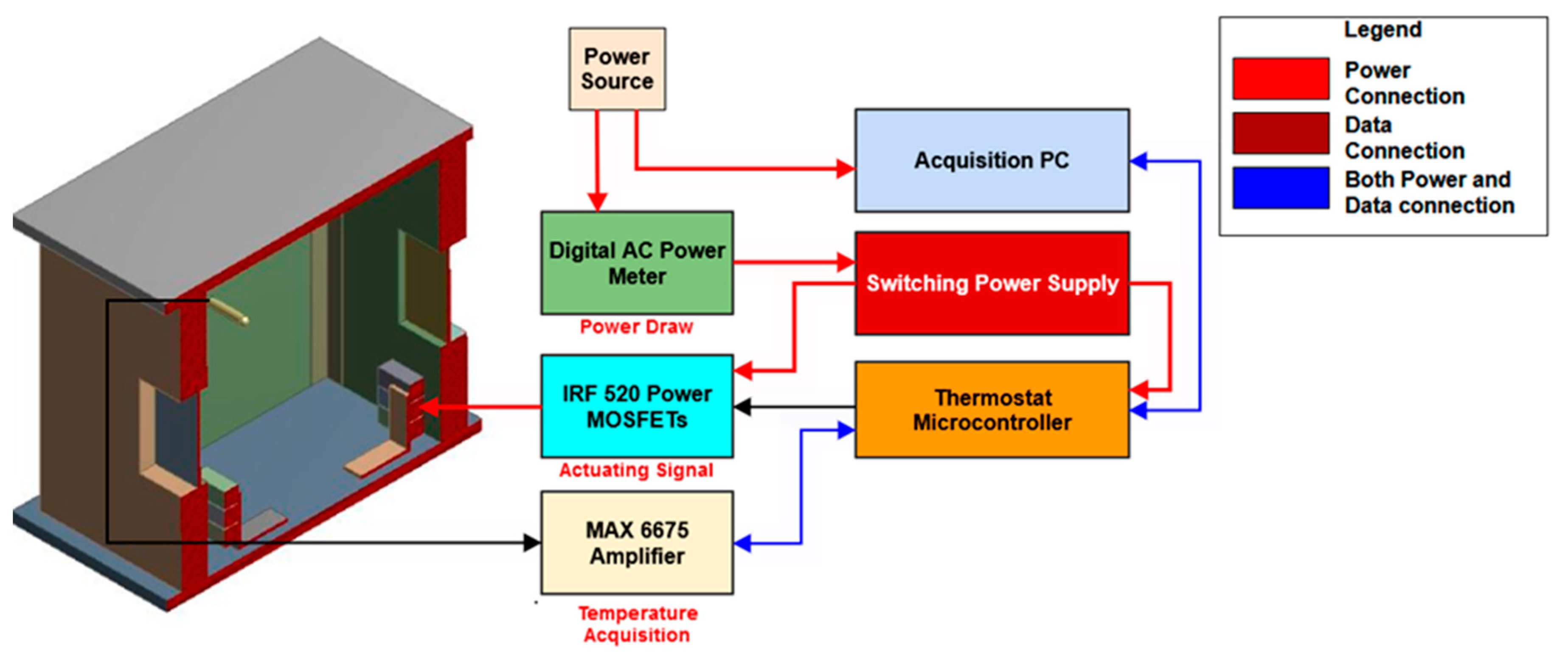
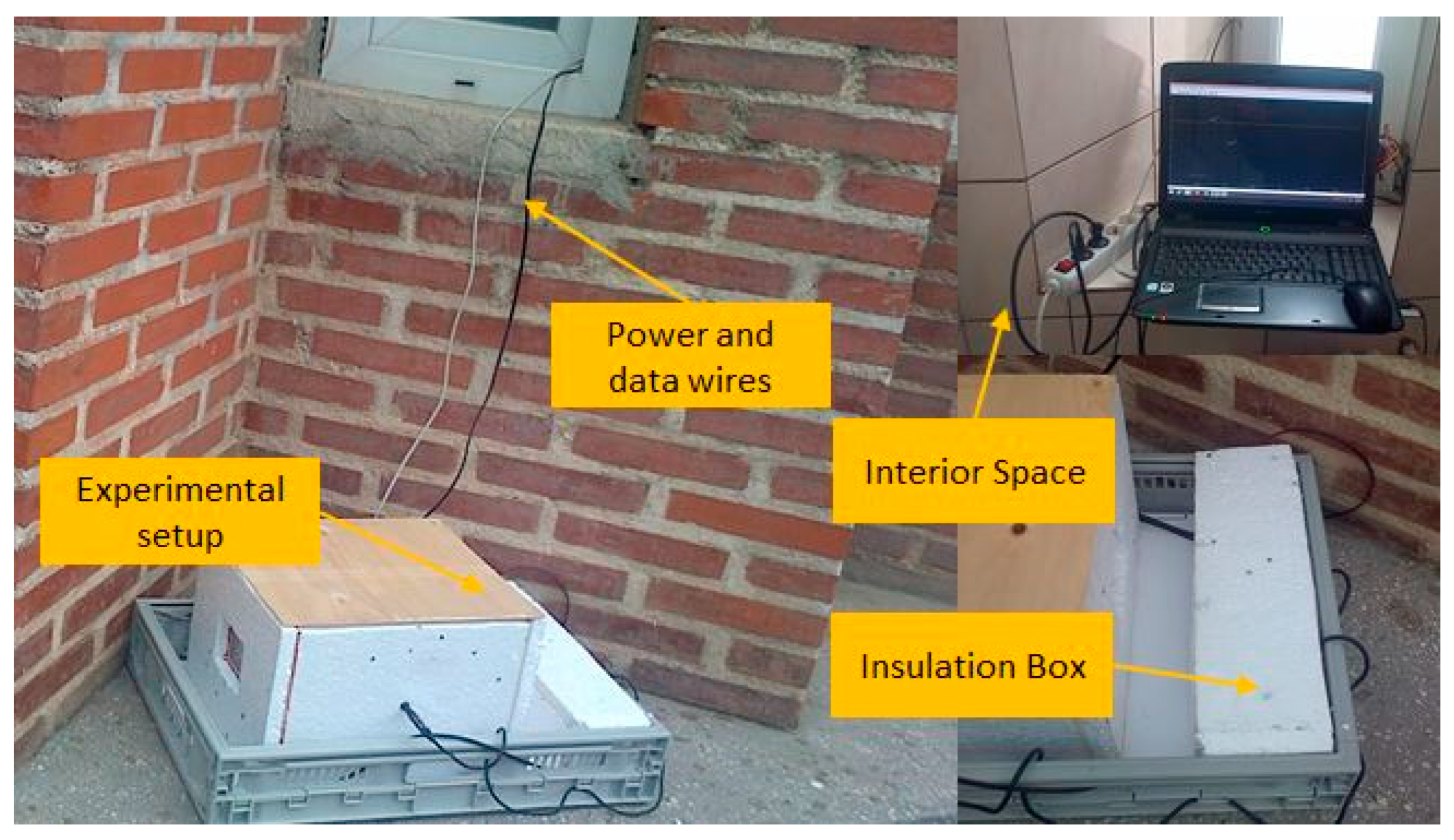
3.2. The Experimental Platform
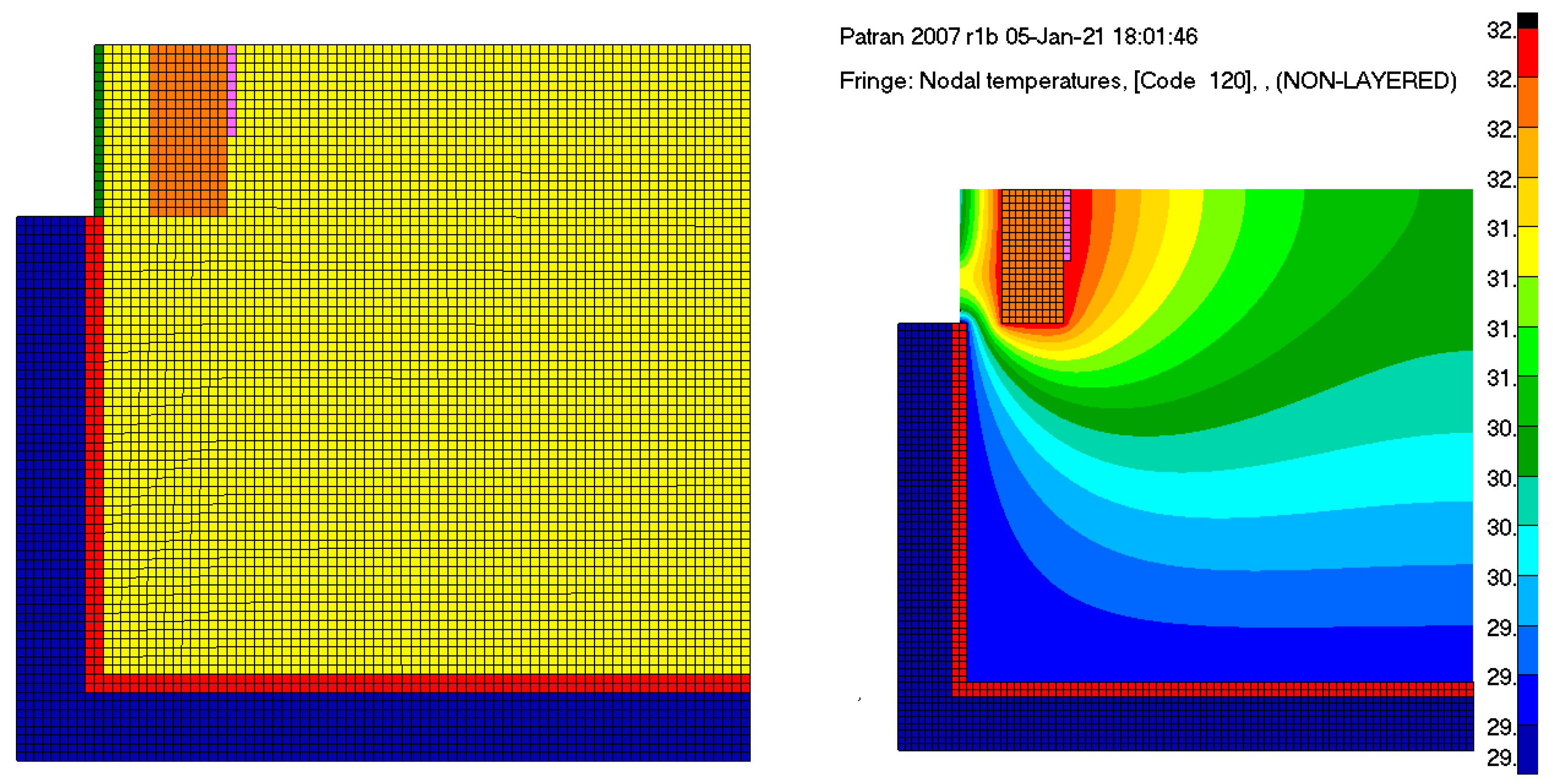
3.3. The Simulation Model
- MSC Patran 2007: a general purpose pre- and postprocessor which was used in the first stage for the graphical definition of the finite elements that materialize the experimental setup. Sections of the simulation input file (i.e., the material data or the heat transfer conditions) were defined based on an automated procedure. After solving the equations, the result files were processed as tabular data and fringe plots;
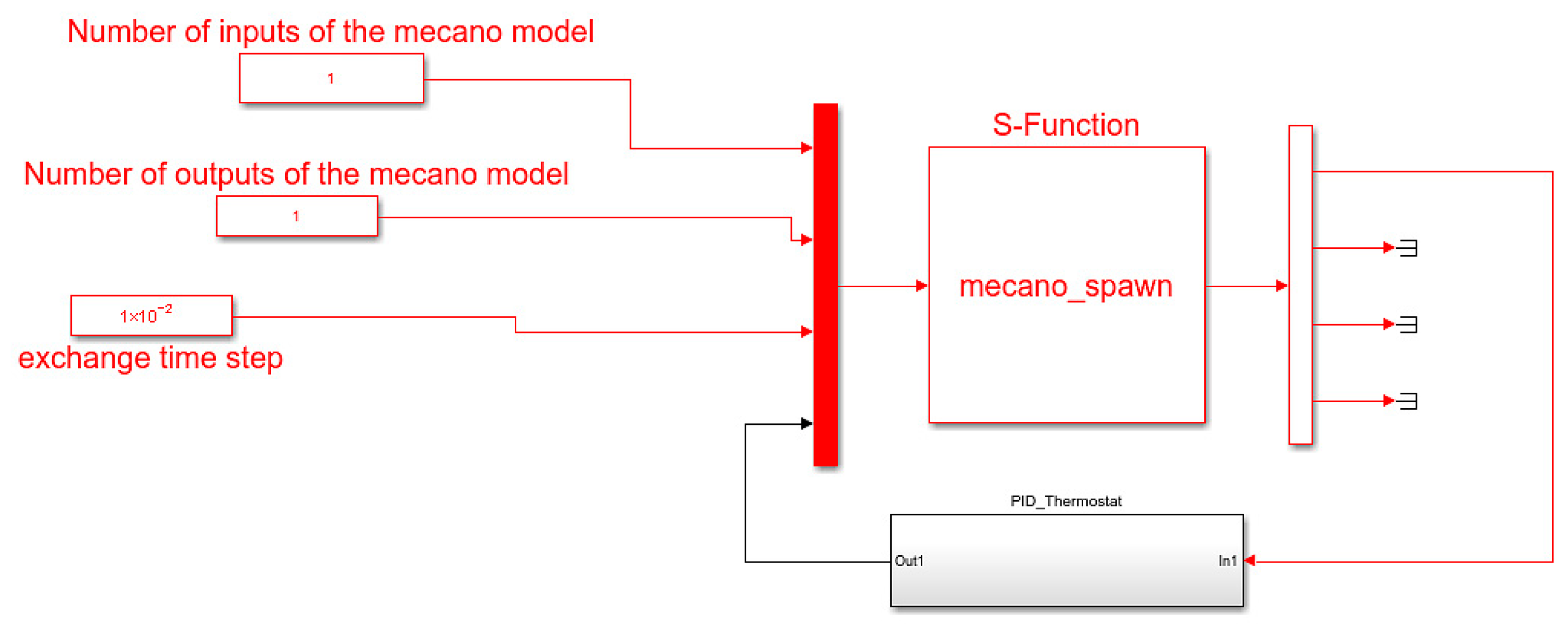
- LMS SAMCEF v15.1: a finite element analysis solver package which includes an extended library of macro elements. Using it, lumped parameter modeling can be carried out for a wide range of thermal and mechanical problems. Another advantage of this software suite is its direct interfacing ability with numerical computing environments, such as MATLAB. Therefore, the solver can operate either standalone (when an input file is provided) or as co-simulation (when results of the analysis are used as input for the numerical computing environment or vice-versa).
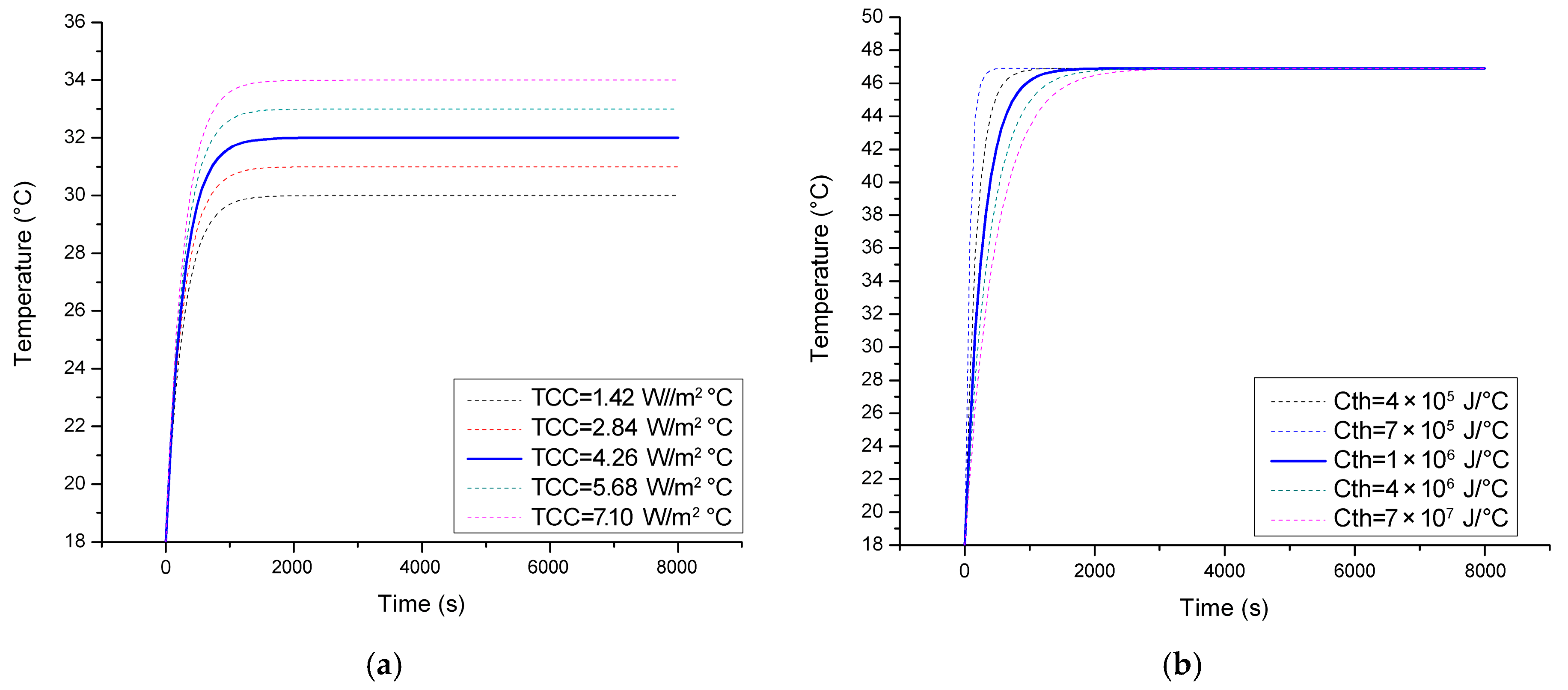
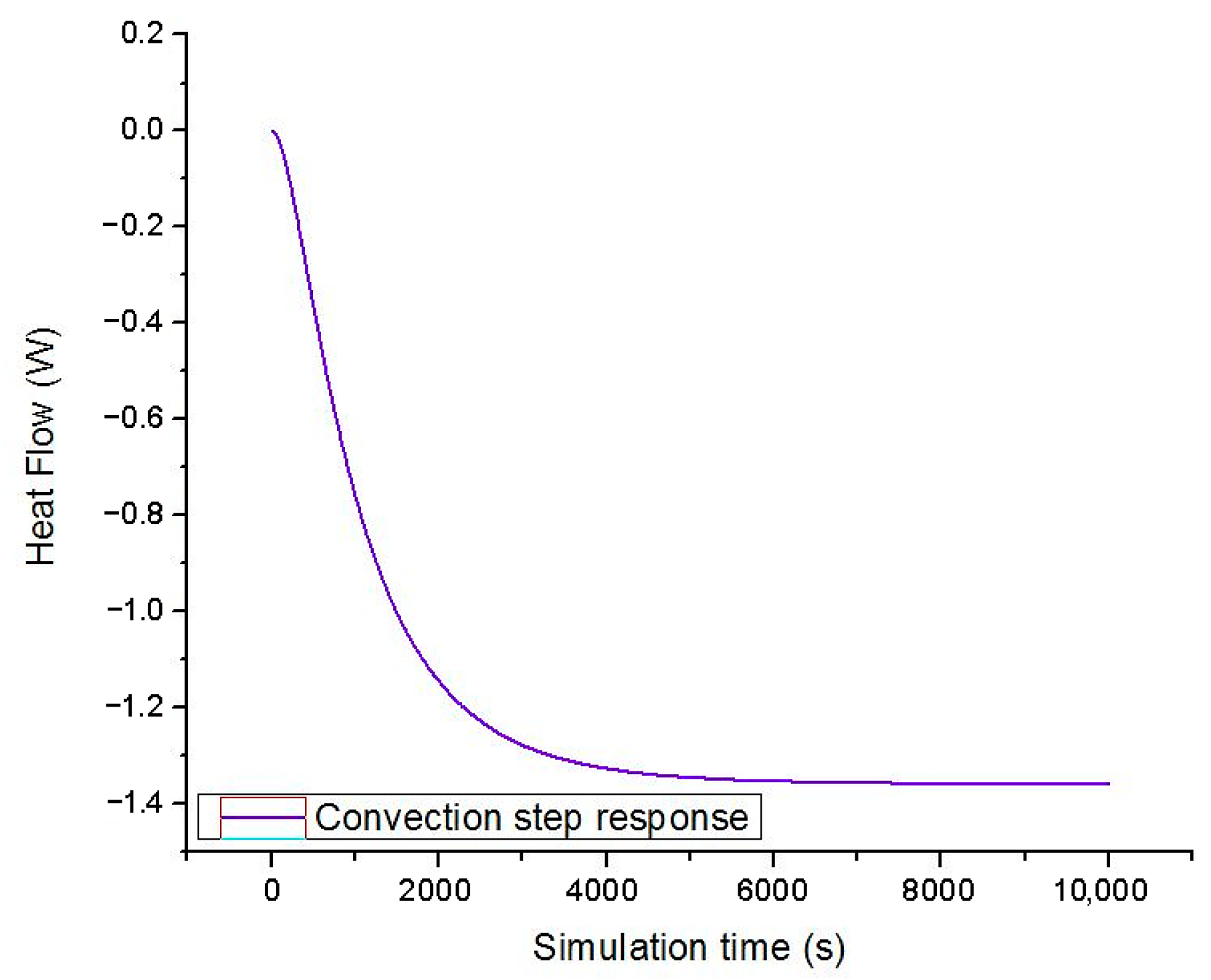
3.4. Identifying the Lumped Parameters of the Simulation Model
3.5. Development of a PID Thermostat
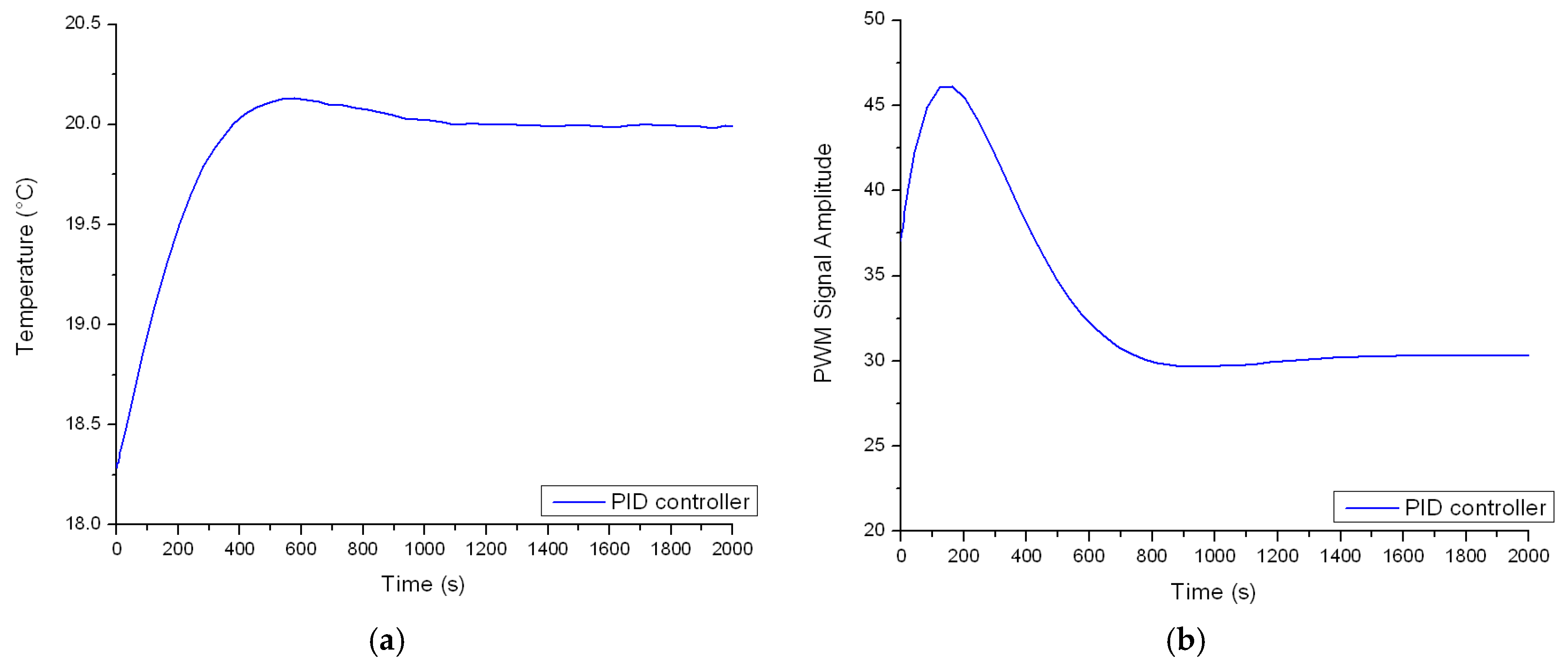
3.6. Ideal Environment Simulation
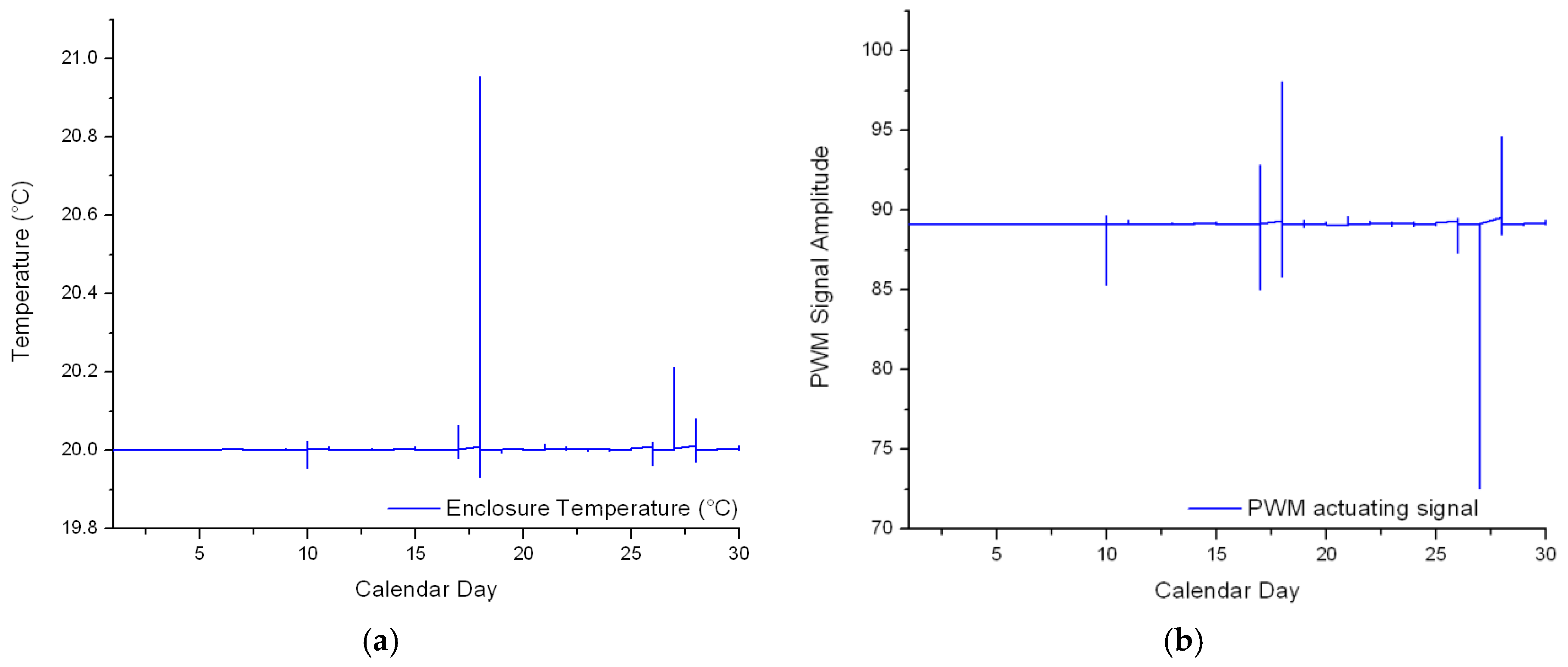
3.7. Simulation in the Exterior Environment
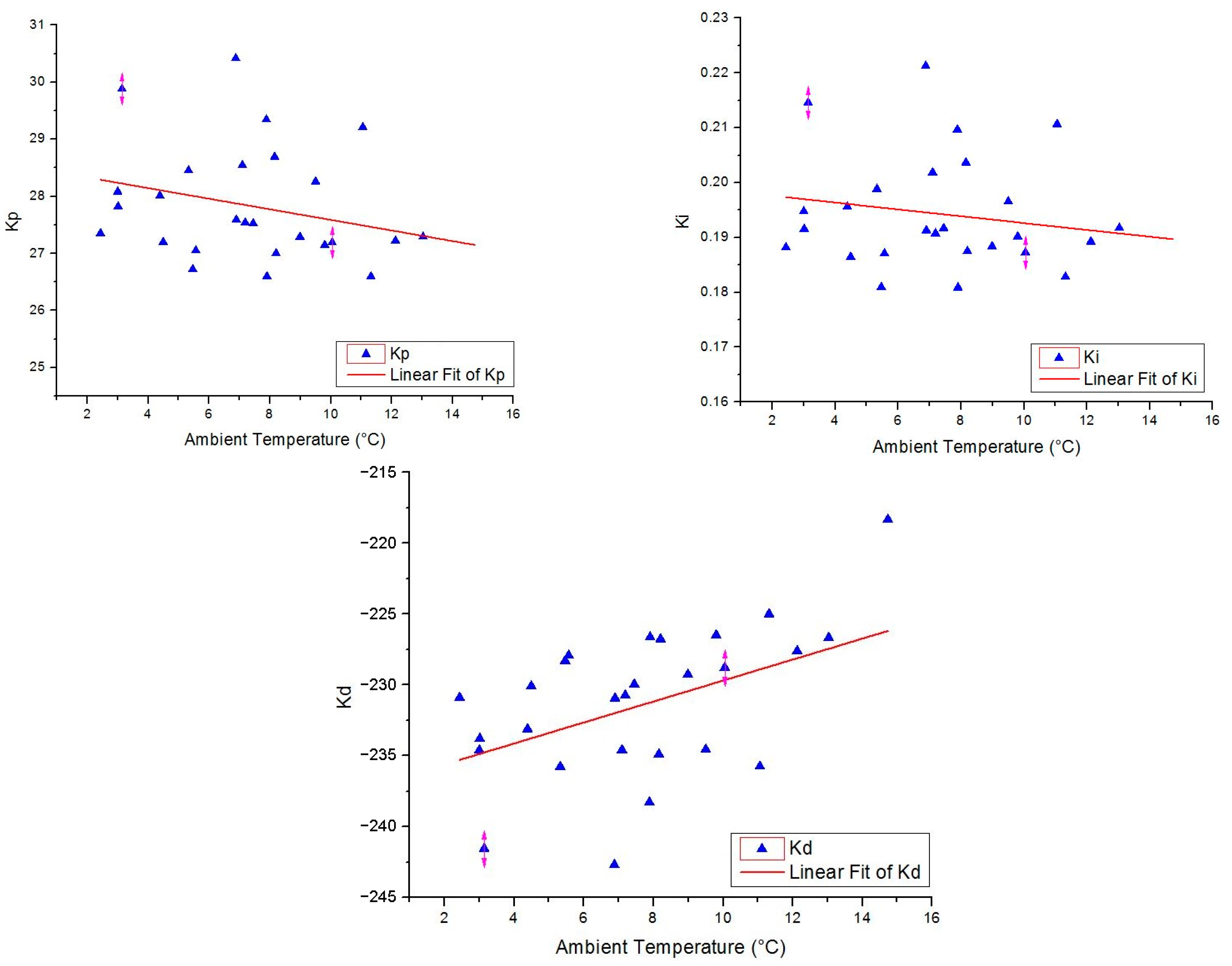
3.8. Evaluation of the Process Disturbances
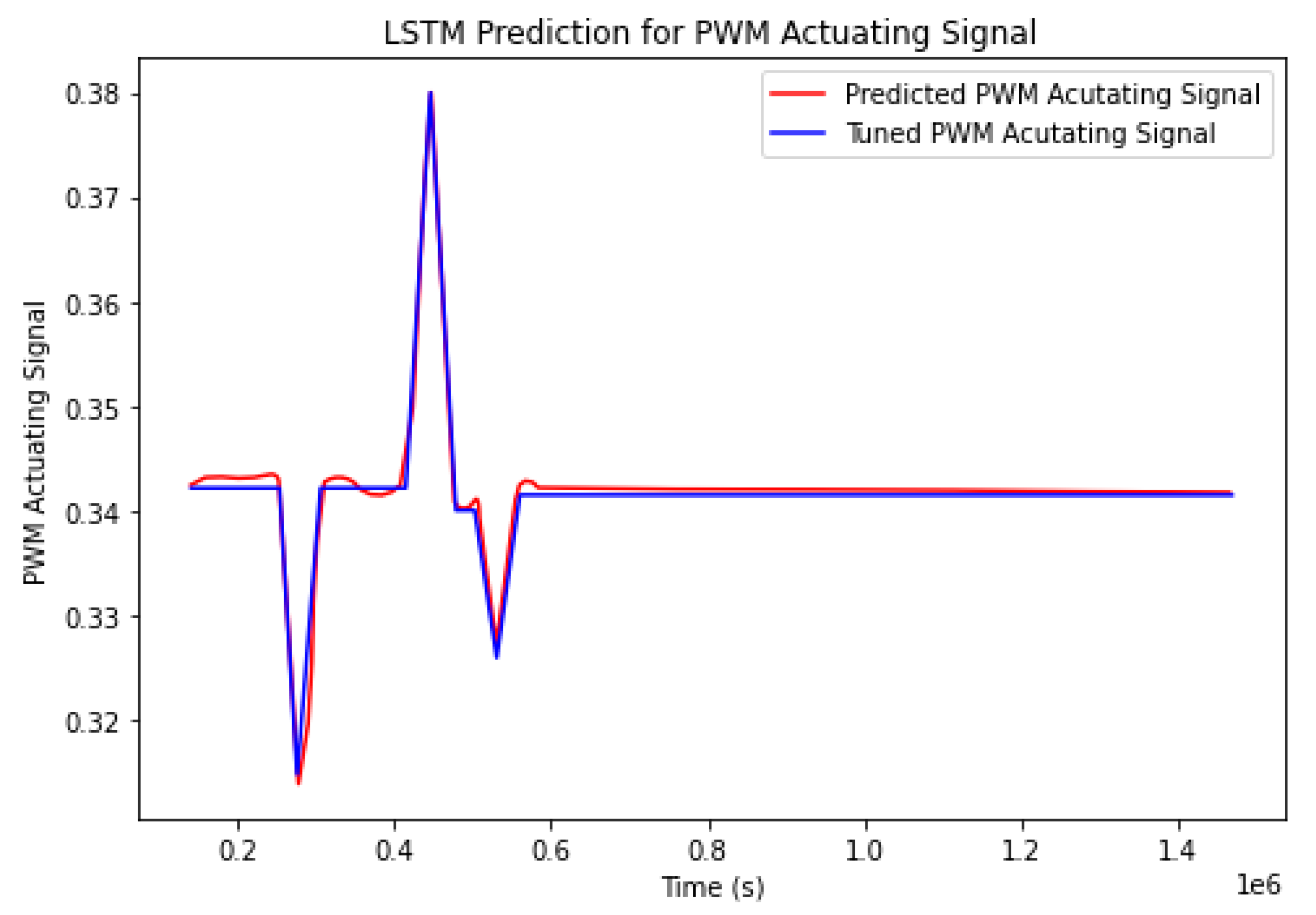
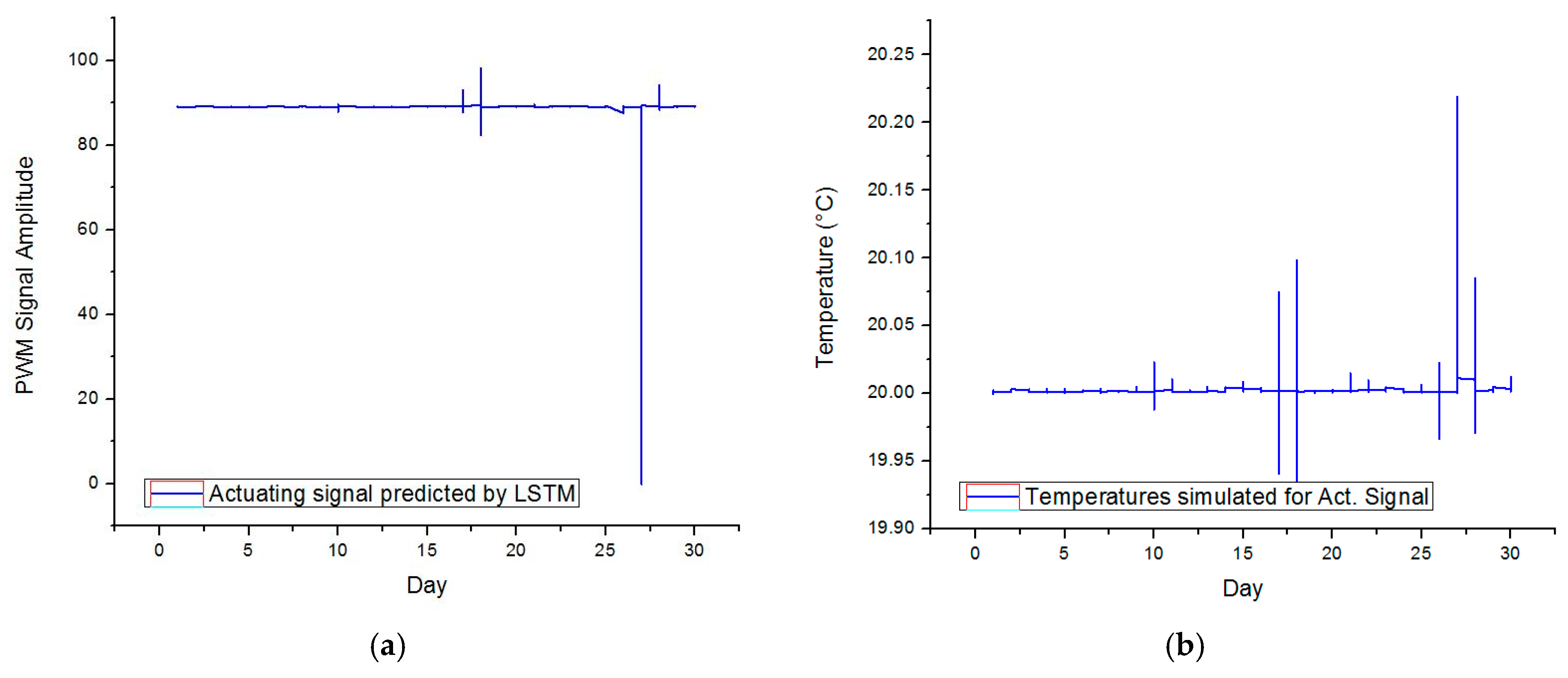
3.9. LSTM Generalization
- Ideal conditions occur when the weather is found in an equilibrium state for long time periods. In this scenario, the effort of the controller to maintain the set point value is low;
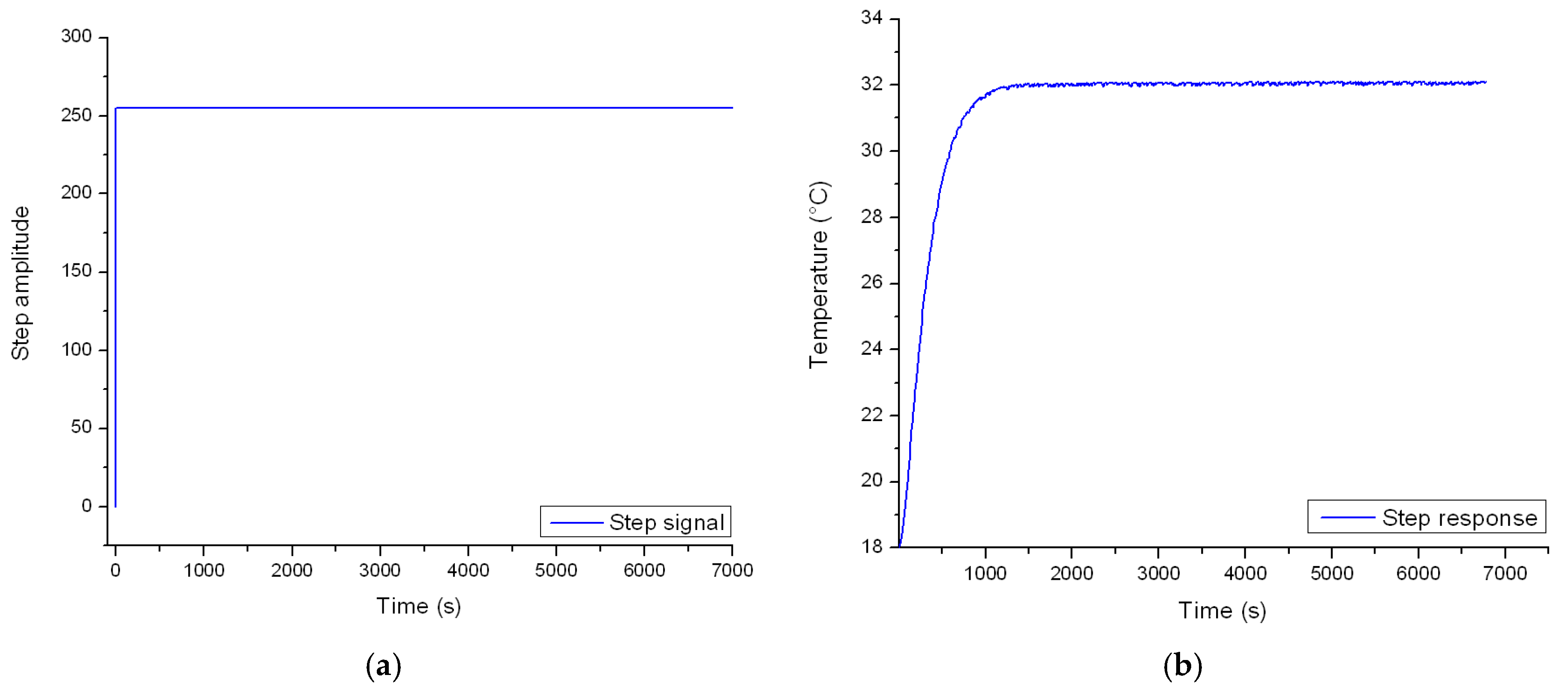
- Step response occurs due to the sudden change of the weather conditions (i.e., varying ambient temperature or wind speeds). This state is characterized by spikes in the actuating signal that compensate the disturbances;
- Limit response is characterized by severe weather conditions (i.e., days with average high wind speeds and low temperatures). In this operational state, the actuating signal is close to its saturation limit;
- Limit overshot represents an operational state in which the weather conditions cause the controller to switch off (i.e., ambient temperatures that exceed the set point value). During such periods, the actuating signal decreases to 0 while overshoot from the set point occurs due to the external factors.
- Mean Absolute error: 0.0025;
- Mean Squared error: 1.60 · 10−5;
- Root Mean Squared Error: 0.004.
4. Results and Discussion
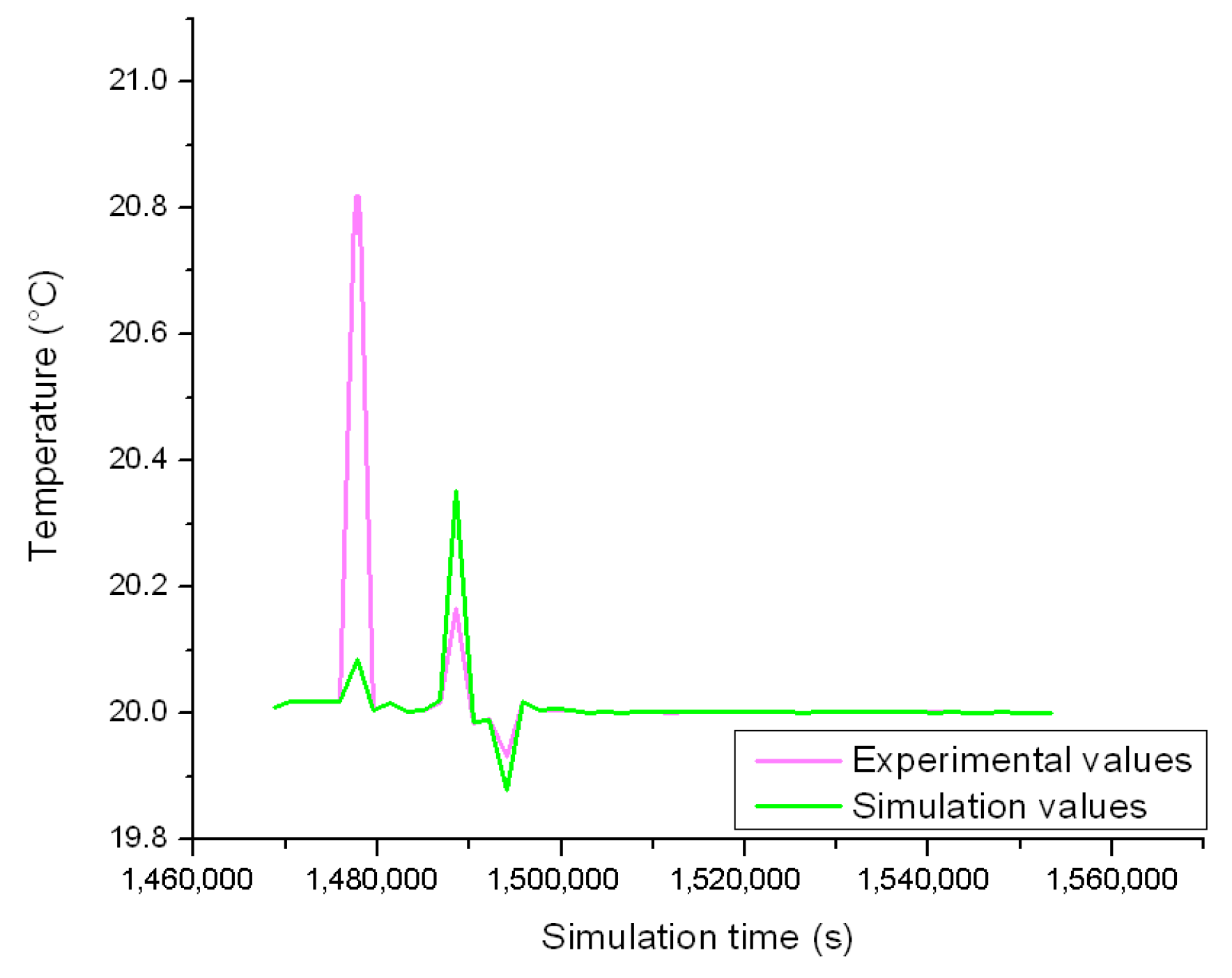
- By matching the conductance and capacitance of the lumped parameter model with the experimental data. In this regard, the temperatures derived from the simulation model match the temperature curves derived from the experiments under step-loading;
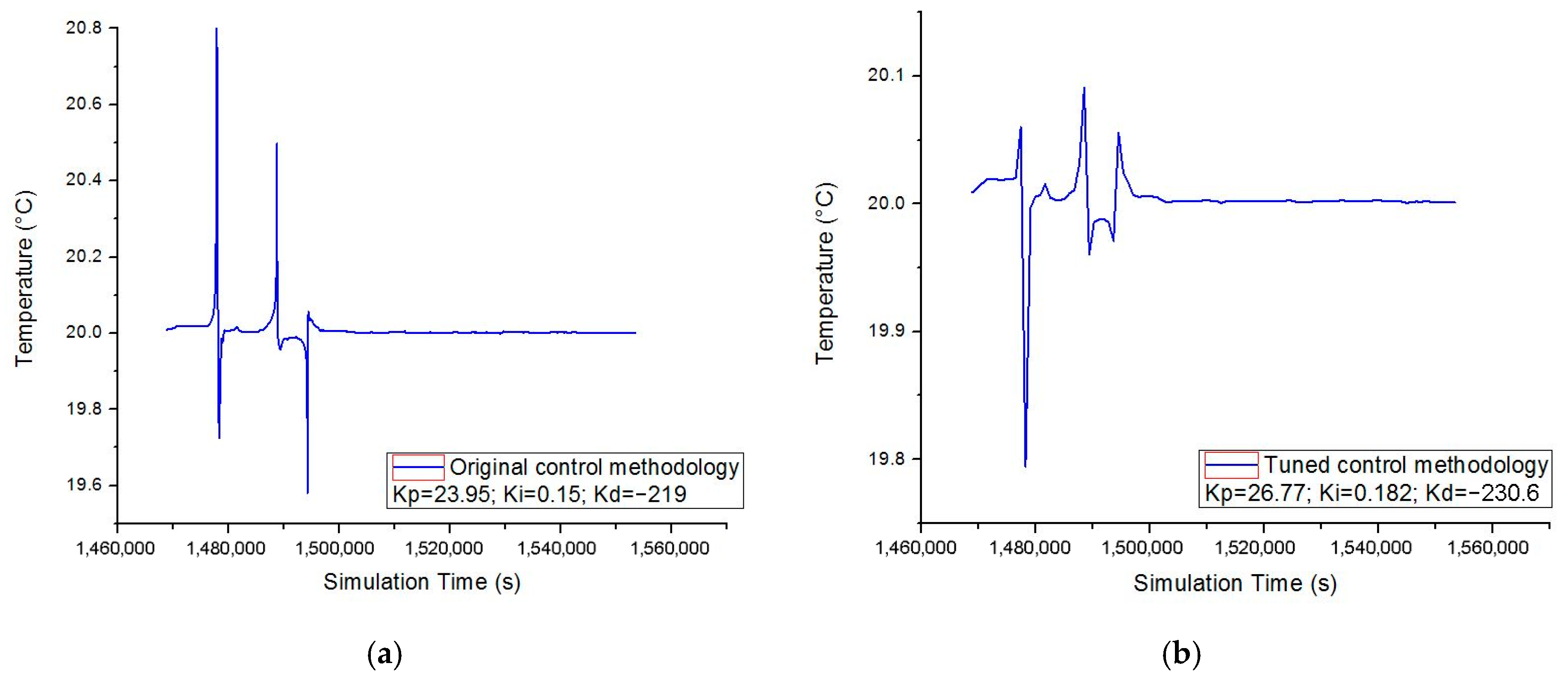
- By testing the control methodology that was developed with the support of the simulation model on a physical thermostat circuit. In this regard, the ability of the PID controller to maintain its setpoint value proves the accuracy of the simulated vs. real-world plant;
- By generalizing the behavior of the actuating signal that was derived by the improved control methodology. The stable operation and increased power efficiency of the thermostat confirms the validity of the given concepts.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Santamouris, M.; Vasilakopoulou, K. Present and future energy consumption of buildings: Challenges and opportunities towards decarbonisation. e-Prime-Adv. Electr. Eng. Electron. Energy 2021, 1, 100002. [Google Scholar] [CrossRef]
- IEA. Global Status Report for Buildings and Construction 2019; IEA: Paris, France, 2019; Available online: https://www.iea.org/reports/global-status-report-for-buildings-and-construction-2019 (accessed on 12 October 2022).
- IEA. Energy Technology Perspectives 2020; IEA: Paris, France, 2020; Available online: https://www.iea.org/reports/energy-technology-perspectives-2020 (accessed on 12 October 2022).
- Cao, X.; Dai, X.; Liu, J. Building energy-consumption status worldwide and the state-of-the-art technologies for zero-energy buildings during the past decade. Energy Build. 2016, 128, 198–213. [Google Scholar] [CrossRef]
- Franco, A.; Miserocchi, L.; Testi, D. HVAC Energy Saving Strategies for Public Buildings Based on Heat Pumps and Demand Controlled Ventilation. Energies 2021, 14, 5541. [Google Scholar] [CrossRef]
- Simpeh, E.K.; Pillay, J.-P.G.; Ndihokubwayo, R.; Nalumu, D.J. Improving energy efficiency of HVAC systems in buildings: A review of best practices. Int. J. Build. Pathol. Adapt. 2022, 40, 165–182. [Google Scholar] [CrossRef]
- Eichhammer, W.; Fleiter, T.; Schlomann, B.; Faberi, S.; Fioretto, M.; Piccioni, N.; Lechtenböhmer, S.; Schüring, A.; Resch, G. Study on the Energy Savings Potentials in EU Member States, Candidate Countries and EEA Countries: Final Report for the European Commission Directorate-General Energy and Transport; Fraunhofer Institute for Systems and Innovation Research ISI: Karlsruhe, Germany, 2011. [Google Scholar]
- CEU. European Council-Conclusions-EUCO (169/14); CEU: Brussels, Belgium, 2014. [Google Scholar]
- Ruparathna, H.K.; Sadiq, R. Improving the energy efficiency of the existing building stock: A critical review of commercial and institutional buildings. Renew. Sustain. Energy Rev. 2016, 53, 1032–1045. [Google Scholar] [CrossRef]
- Afram, A.; Janabi-Sharifi, F. Review of modeling methods for HVAC systems. Appl. Thermal Eng. 2014, 67, 507–519. [Google Scholar] [CrossRef]
- Rao, D.V.; Ukil, A. Modeling of room temperature dynamics for efficient building energy management. IEEE Trans. Syst. Man Cybern.-Syt. 2017, 50, 717–725. [Google Scholar] [CrossRef]
- Foucquier, A.; Robert, S.; Suard, F.; Stéphan, L.; Jay, A. State of the art in building modeling and energy performance prediction: A review. Renew. Sustain. Energy Rev. 2013, 23, 272–288. [Google Scholar] [CrossRef] [Green Version]
- Milanowski, M.; Cazorla-Marín, A.; Montagud-Montalvá, C. Energy Analysis and Cost-Effective Design Solutions for a Dual-Source Heat Pump System in Representative Climates in Europe. Energies 2022, 15, 8460. [Google Scholar] [CrossRef]
- TRNSYS. Transient System Simulation Tool. Available online: http://www.trnsys.com (accessed on 15 October 2022).
- EnergyPlus. Available online: https://energyplus.net (accessed on 15 October 2022).
- Jeon, B.-K.; Kim, E.-J. White-Model Predictive Control for Balancing Energy Savings and Thermal Comfort. Energies 2022, 15, 2345. [Google Scholar] [CrossRef]
- Popescu, F.D.; Radu, S.M.; Andraș, A.; Brînaș, I.; Budilică, D.I.; Popescu, V. Comparative Analysis of Mine Shaft Hoisting Systems’ Brake Temperature Using Finite Element Analysis (FEA). Materials 2022, 15, 3363. [Google Scholar] [CrossRef] [PubMed]
- Andras, A.; Brînaș, I.; Radu, S.M.; Popescu, F.D.; Popescu, V.; Budilică, D.I. Investigation of the Thermal Behaviour for the Disc-Pad Assembly of a Mine Hoist Brake Using COMSOL Multiphysics. Acta Tech. Napoc.-Ser. Appl. Math. Mech. Eng. 2021, 64, 227–234. [Google Scholar]
- Jorissen, F.; Helsen, L. Integrated Modelica Model and Model Predictive Control of a Terraced House Using IDEAS. In Proceedings of the 13th Modelica Conference, Regensburg, Germany, 4–6 March 2019. [Google Scholar]
- Modelica. Available online: https://modelica.org (accessed on 15 October 2022).
- Macas, M.; Moretti, F.; Fonti, A.; Giantomassi, A.; Comodi, G.; Annunziato, M.; Pizzuti, S.; Capra, A. The role of data sample size and dimensionality in neural network based forecasting of building heating related variables. Energy Build. 2016, 111, 299–310. [Google Scholar] [CrossRef]
- Afram, A.; Janabi-Sharifi, F.; Fung, A.S.; Raahemifar, K. Artificial neural network (ANN) based model predictive control (MPC) and optimization of HVAC systems: A state of the art review and case study of a residential HVAC system. Energy Build. 2017, 141, 96–113. [Google Scholar] [CrossRef]
- Bile, A.; Tari, H.; Grinde, A.; Frasca, F.; Siani, A.M.; Fazio, E. Novel Model Based on Artificial Neural Networks to Predict Short-Term Temperature Evolution in Museum Environment. Sensors 2022, 22, 615. [Google Scholar] [CrossRef] [PubMed]
- Ríos-Moreno, G.J.; Trejo-Perea, M.; Castañeda-Miranda, R.; Hernández-Guzmán, V.M.; Herrera-Ruiz, G. Modelling temperature in intelligent buildings by means of autoregressive models. Automat. Constr. 2007, 16, 713–722. [Google Scholar] [CrossRef]
- Delcroix, B.; Ny, J.L.; Bernier, M.; Azam, M.; Qu, B.; Venne, J.S. Autoregressive neural networks with exogenous variables for indoor temperature prediction in buildings. Build. Simul. 2021, 14, 165–178. [Google Scholar] [CrossRef]
- Thilker, C.A.; Bacher, P.; Cali, D.; Madsen, H. Identification of non-linear autoregressive models with exogenous inputs for room air temperature modelling. Energy AI 2022, 9, 100165. [Google Scholar] [CrossRef]
- Aliberti, A.; Bottaccioli, L.; Macii, E.; Di Cataldo, S.; Acquaviva, A.; Patti, E. A Non-Linear Autoregressive Model for Indoor Air-Temperature Predictions in Smart Buildings. Electronics 2019, 8, 979. [Google Scholar] [CrossRef] [Green Version]
- Killian, M.; Mayer, B.; Kozek, M. Effective fuzzy black-box modeling for building heating dynamics. Energy Build. 2015, 96, 175–186. [Google Scholar] [CrossRef]
- Chen, K.; Jiao, Y.; Lee, E.S. Fuzzy adaptive networks in thermal comfort. Appl. Math. Lett. 2006, 19, 420–426. [Google Scholar] [CrossRef]
- Bacher, P.; Madsen, H. Identifying suitable models for the heat dynamics of buildings. Energy Build. 2011, 43, 1511–1522. [Google Scholar] [CrossRef] [Green Version]
- Coffman, A.R.; Barooah, P. Simultaneous identification of dynamic model and occupant-induced disturbance for commercial buildings. Build. Environ. 2018, 128, 153–160. [Google Scholar] [CrossRef] [Green Version]
- Cui, B.; Fan, C.; Munk, J.; Mao, N.; Xiao, F.; Dong, J.; Kuruganti, T. A hybrid building thermal modeling approach for predicting temperatures in typical, detached, two-story houses. Appl. Energy 2019, 236, 101–116. [Google Scholar] [CrossRef]
- Ellis, M.J. Machine learning enhanced grey-box modeling for building thermal modeling. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 3927–3932. [Google Scholar]
- Xu, C.; Chen, H.; Wang, J.; Guo, Y.; Yuan, Y. Improving prediction performance for indoor temperature in public buildings based on a novel deep learning method. Build Environ. 2019, 148, 128–135. [Google Scholar] [CrossRef]
- Elmaz, F.; Eyckerman, R.; Casteels, W.; Latré, S.; Hellinckx, P. CNN-LSTM architecture for predictive indoor temperature modeling. Build Environ. 2021, 206, 108327. [Google Scholar] [CrossRef]
- Cotta, R.M.; Mikhailov, M.D. Heat Conduction–Lumped Analysis, Integral Transforms, Symbolic Computation; John Wiley and Sons: Chichester, UK, 1997. [Google Scholar]
- Sadat, H. A general lumped model for transient heat conduction in one-dimensional geometries. Appl. Therm. Eng. 2005, 25, 567–576. [Google Scholar] [CrossRef]
- Zarrella, A.; Prataviera, E.; Romano, P.; Carnieletto, L.; Vivian, J. Analysis and application of a lumped-capacitance model for urban building energy modelling. Sustain. Cities Soc. 2020, 63, 102450. [Google Scholar] [CrossRef]
- Panão, M.J.O.; Santos, C.A.; Mateus, N.M.; da Graça, G.C. Validation of a lumped RC model for thermal simulation of a double skin natural and mechanical ventilated test cell. Energy Build. 2016, 121, 92–103. [Google Scholar] [CrossRef]
- Underwood, C.P. An improved lumped parameter method for building thermal modeling. Energy Build. 2014, 79, 191–201. [Google Scholar] [CrossRef] [Green Version]
- Dimitriou, V.; Firth, S.K.; Hassan, T.M.; Kane, T.; Coleman, M. Data-driven simple thermal models: The importance of the parameter estimates. Energy Procedia 2015, 78, 2614–2619. [Google Scholar] [CrossRef]
- Ramallo-González, A.P.; Eames, M.E.; Coley, D.A. Lumped Parameter Models for Building Thermal Modelling: An Analytic Approach to Simplifying Complex Multi-Layered Constructions. Energy Build. 2013, 60, 174–184. [Google Scholar] [CrossRef] [Green Version]
- Incropera, F.P.; DeWitt, D.P.; Bergman, T.L.; Lavine, A.S. Fundamentals of Heat and Mass Transfer, 8th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Woodbury, K.A.; Najafi, H.; Beck, J.V. Exact analytical solution for 2-D transient heat conduction in a rectangle with partial heating on one edge. Int. J. Therm. Sci. 2017, 112, 252–262. [Google Scholar] [CrossRef]
- Kumar, A.; Rana, S.; Gori, Y.; Sharma, N.K. Thermal Contact Conductance Prediction Using FEM-Based Computational Techniques. In Advanced Computational Methods in Mechanical and Materials Engineering; CRC Press: Boca Raton, FL, USA, 2021; pp. 183–217. [Google Scholar]
- Rincon-Tabares, J.S.; Velasquez-Gonzalez, J.C.; Ramirez-Tamayo, D.; Montoya, A.; Millwater, H.; Restrepo, D. Sensitivity Analysis for Transient Thermal Problems Using the Complex-Variable Finite Element Method. Appl. Sci. 2022, 12, 2738. [Google Scholar] [CrossRef]
- Samtech, S.A. SAMCEF User Manuals; Crouzier Régis: Liege, France, 2013; pp. 1–94. [Google Scholar]
- Chaturvedi, M.; Juneja, P.K.; Chauhaan, P. Effect of implementing different PID algorithms on controllers designed for SOPDT process. In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 853–858. [Google Scholar]
- Nath, U.M.; Dey, C.; Mudi, R.K. Designing of anti-windup feature for internal model controller with real-time performance evaluation on temperature control loop. In Proceedings of the 2019 2nd International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 5–6 July 2019; Volume 1, pp. 787–790. [Google Scholar]
- Shein, W.W.; Tan, Y.; Lim, A.O. PID controller for temperature control with multiple actuators in cyber-physical home system. In Proceedings of the 2012 15th International Conference on Network-Based Information Systems, Melbourne, Australia, 26–28 September 2012; pp. 423–428. [Google Scholar]
- Wheather in Bucharest and Ilfov County (Vremea în București și județul Ilfov). Available online: https://vremea.ido.ro/Bucuresti.htm (accessed on 7 November 2022).
- Royer, S.; Thil, S.; Talbert, T.; Polit, M. A procedure for modeling buildings and their thermal zones using co-simulation and system identification. Energy Build. 2014, 78, 231–237. [Google Scholar] [CrossRef]
- Kothapalli, S.; Totad, S.G. A real-time weather forecasting and analysis. In Proceedings of the 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, India, 21–22 September 2017; pp. 1567–1570. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
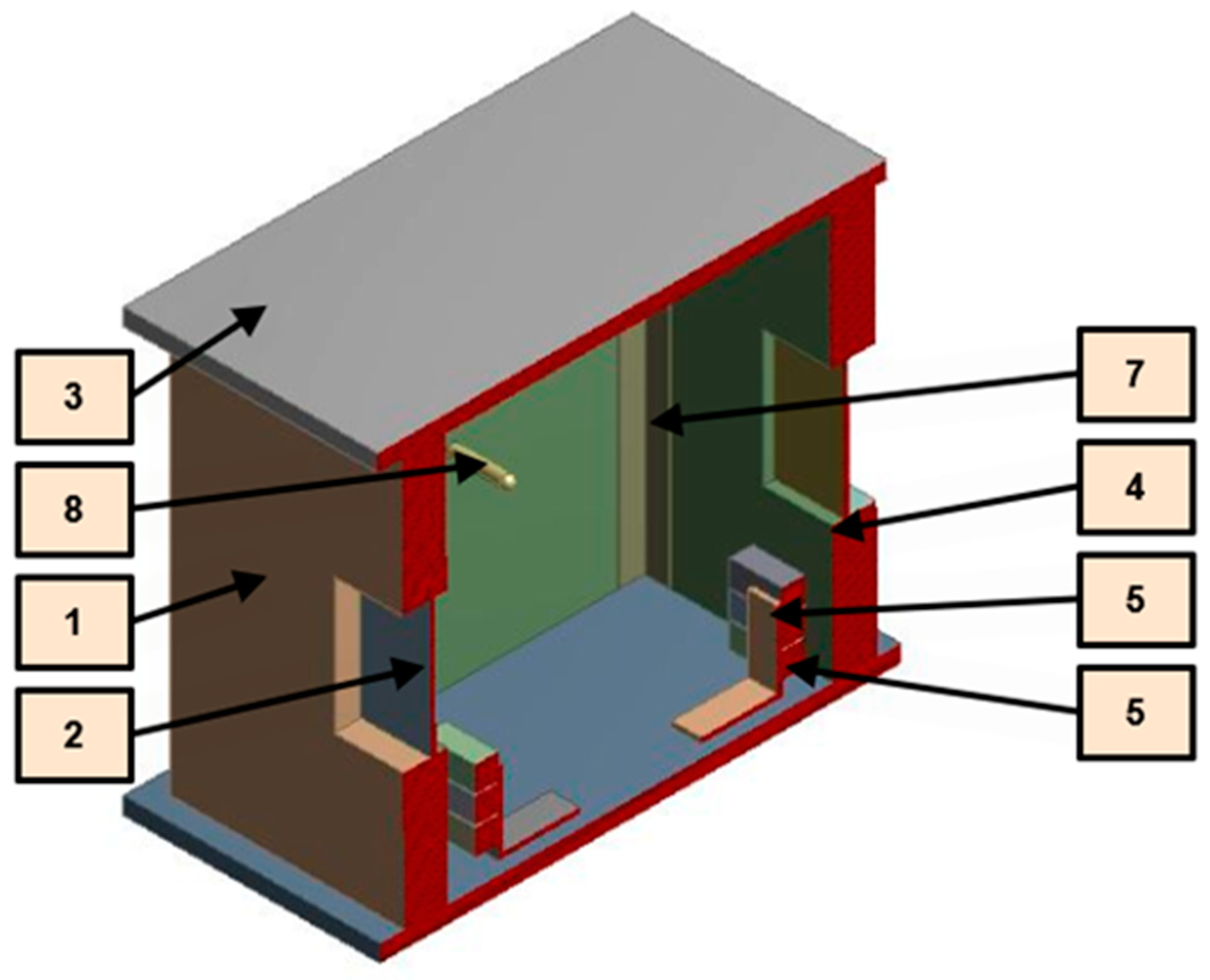
| Number | Name of the Component | Description |
|---|---|---|
| 1 | Side walls polystyrene insulation | 15 mm thickness expanded polystyrene insulation panels |
| 2 | Plexiglas window | 100 × 100 × 3 mm Plexiglas panel |
| 3 | Poplar plywood celling/floor | 6 mm thickness |
| 4 | Poplar plywood walls | |
| 5 | Steel elbow | 2 mm thickness standard steel |
| 6 | Group of resistors | 30 W total power dissipation |
| 7 | PVC cornice | 0.5 mm thickness |
| 8 | Tc-k thermocouple | ±0.25 °C resolution |
| Date | Temperature (°C) | Humidity (%) | Wind Speed (Km/h) | Pressure (mmHg) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Max | Avg. | Min | Max | Avg. | Min | Max | Avg. | Min | Max | Avg. | |
| 10 November 2021 | 0 | 8.88 | 4.36 | 53 | 100 | 81.1 | 1.6 | 14.4 | 7.3 | 768 | 771 | 770 |
| 18 November 2021 | 1.11 | 8.9 | 5.56 | 54 | 93 | 74.3 | 0 | 11.2 | 6.23 | 759.7 | 763.5 | 760.8 |
| Day | Average Temperature (°C) | Average Humidity (%) | Average Wind Speed (Km/h) | Average Pressure (mmHg) | Corrections | Tuned Gains | |||
|---|---|---|---|---|---|---|---|---|---|
| TCC (%) | Cth (%) | Kp | Ki | Kd | |||||
| 1 November 2021 | 10.04 | 85.4 | 3.97 | 753.8 | −4.23 | +5.51 | 26.393 | 0.178 | −228.965 |
| 5 November 2021 | 13.73 | 78.6 | 3.52 | 753.9 | +0.08 | +2.34 | 24.485 | 0.161 | −219.555 |
| 10 November 2021 | 4.36 | 81.1 | 7.3 | 770 | −6.2 | +7.7 | 27.489 | 0.190 | −233.453 |
| 13 November 2021 | 5.23 | 88.8 | 7.51 | 759 | −7.00 | +7.59 | 27.719 | 0.191 | −235.467 |
| 18 November 2021 | 5.56 | 74.3 | 6.23 | 760.8 | −4.97 | +6.23 | 26.775 | 0.182 | −230.648 |
| 24 November 2021 | 3.00 | 86.3 | 4.76 | 762.1 | −6.7 | +6.81 | 27.413 | 0.188 | −234.830 |
| 26 November 2021 | 2.99 | 85.3 | 5.86 | 748.4 | −7.55 | +6.68 | 27.642 | 0.189 | −236.997 |
| 29 November 2021 | 7.88 | 89.18 | 11.7 | 738.5 | −8.95 | +9.12 | 28.713 | 0.201 | −240.261 |
| 30 November 2021 | 3.13 | 86.7 | 11.7 | 744.7 | −10.6 | +10.1 | 29.504 | 0.208 | −244.545 |
| Regression Statistics | |||
|---|---|---|---|
| Prediction for Kp | Prediction for Ki | Prediction for Kd | |
| Multiple R | 0.910 | 0.913 | 0.964 |
| R Square | 0.828 | 0.834 | 0.930 |
| Adjusted R Square | 0.809 | 0.815 | 0.922 |
| Standard Error | 0.532 | 0.005 | 1.493 |
| Observations | 30 | ||
| Intercept and Coefficients | |||
|---|---|---|---|
| Prediction for Kp | Prediction for Ki | Prediction for Kd | |
| Intercept | 20.924 | 0.136 | −194.030 |
| Average temperature (°C) | −0.150 | −0.001 | 0.917 |
| Average humidity (%) | 0.069 | 0.001 | −0.431 |
| Average wind speed (Km/h) | 0.296 | 0.003 | −1.107 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexandru, T.G.; Alexandru, A.; Popescu, F.D.; Andraș, A. The Development of an Energy Efficient Temperature Controller for Residential Use and Its Generalization Based on LSTM. Sensors 2023, 23, 453. https://doi.org/10.3390/s23010453
Alexandru TG, Alexandru A, Popescu FD, Andraș A. The Development of an Energy Efficient Temperature Controller for Residential Use and Its Generalization Based on LSTM. Sensors. 2023; 23(1):453. https://doi.org/10.3390/s23010453
Chicago/Turabian StyleAlexandru, Tudor George, Adriana Alexandru, Florin Dumitru Popescu, and Andrei Andraș. 2023. "The Development of an Energy Efficient Temperature Controller for Residential Use and Its Generalization Based on LSTM" Sensors 23, no. 1: 453. https://doi.org/10.3390/s23010453