1.1. Radiological and Nuclear Threats
Illicit traffic of special nuclear materials (SNMs) and radioactive sources and materials is a cause for concern worldwide, due to the possible use of these materials in improvised nuclear devices (INDs) and radiological dispersal devices (RDDs) or radiological exposure devices (REDs). Large and heavy fixed radiation portal monitors (RPMs) are normally used at international borders, sea ports and airports in order to detect SNMs and radioactive sources or materials. RPMs are normally used to screen shipping-container cargo and vehicles. Portable RPMs can also be deployed for security screening (e.g., major events) and contamination monitoring, e.g., population monitoring after a radiological or nuclear (RN) incident [
1]; however their mobility is reduced, and they are also heavy.
Despite the fact that many radionuclides are used as radioactive and radiation sources in industry, medicine and research, only a few of them are widely available in concentrated amounts that could be used in RDDs, namely:
241Am,
252Cf,
137Cs,
60Co,
192Ir,
238Pu,
210Po,
226Ra, and
90Sr [
2]. Three of these radionuclides,
137Cs,
60Co and
192Ir, emit gamma rays with energies in the hundreds of keV or slightly above 1 MeV (for
60Co), whilst
241Am is considered a low-energy gamma-ray emitter (59.5 keV energy line).
90Sr is a beta emitter, and like the alpha emitters
241Am,
252Cf,
238Pu,
210Po, and
226Ra, is dangerous mainly when ingested or inhaled. Neutron sources, such as
252Cf (spontaneous fission source) or
241Am–beryllium (which results from the mixing of an alpha emitter with a light nucleus such as beryllium), are used for soil and concrete density and moisture measurements, and in the oil and gas well logging industry.
For Security and Defense, SNMs are a major concern, since the detonation of an IND would cause not only the dispersal of radioactive material, but would also lead to mass casualties. While plutonium can be detected by both gamma rays and neutrons (spontaneous fission source), highly enriched uranium (HEU) is extremely difficult to detect, since: (i) low-intensity and low-energy gamma rays (185 keV) are emitted, which can be easily shielded, concealed or masked; and (ii) it is characterized by a very low emission rate of neutrons [
3]. Active interrogation (using X-rays, gamma rays, neutrons or muons) is an alternative to passive detection equipment when sources are not detectable (weak or shielded sources) [
4,
5].
1.2. Screening of Shipping Containers
Since the sea freight corresponds to around 90% of traded goods worldwide, there is a challenge related to the screening of shipping-container cargo at seaports due to the volume and speed of trade flows. Therefore, maintaining the normal flow of legitimate goods and at the same time, undertaking the monitoring of nuclear and radioactive sources, as well as other illegal imports (e.g., explosives, narcotics and conventional weapons), can be a very difficult and challenging task given the number of front-line officers (FLO) available [
6].
To facilitate transportation via ships, rails or trucks, standard steel containers are used, which are 20 foot and 40 foot long. Some inspection techniques are available based on the cargo documentation check, a physical search of the container (which is very time consuming), and by deploying non-intrusive imaging (e.g., X-rays or gamma rays). Despite the advantages of non-intrusive imaging, such as faster detection times and preselection of containers for physical searches, expensive equipment is used and operation and maintenance costs have to be taken into account. For example, in European ports, only about 10% of incoming containers are scanned, and of these, only 2% are physically searched [
7]. While a complete scan of a container can take, on average, less than one minute, in the case of an alarm, the secondary inspection is normally carried out manually with a handheld radioisotope identification device (RIID) that may take up to twenty minutes. If the secondary inspection is inconclusive, a third and more exhaustive inspection is made by certified radiation experts and implies unpacking the container (this may take 3 h for a 40-foot long container). Scanning transshipments is also a challenging task, since the containers are offloaded from one ship and loaded into another ship without passing through the RPMs (which are normally located at the seaport exit/entrance points) [
6].
According to Martin and Connolly [
8] a well-designed screening system should efficiently detect and identify radioactive materials and SNMs that could be used to fabricate a RDD or an IND, while keeping the normal flow of cargo affordable so that it can be easily replicated. At the seaports, this is normally achieved via a two-stage process: (i) a primary inspection in which the shipping containers pass through a large polyvinyl-toluene (PVT) plastic scintillators (high geometric detection efficiency) for gamma-ray detection and, in some cases, neutron detectors based normally in
3He tube detectors. A “counts above threshold” alarm criteria is used to select the containers that will be further inspected; (ii) a secondary inspection for source identification and localization. In order to make better decisions, the following capabilities are highlighted as being of paramount importance: the use of data processing algorithms such as the energy windowing, rapid radionuclide identification, activity estimation and source localization. Some alternatives to fixed RPMs are a network of mobile or stationary high-resolution inorganic scintillators, for use in urban and border monitoring scenarios, that could be used not only for screening purposes but also for source characterization and localization. At seaports, this network of detectors could be transported by port vehicles and continuously map the radiation.
Algorithms described in literature for the detection and, in some cases, localization of radioactive sources using a detector network are: the maximum likelihood estimation (MLE) [
9,
10], triangulation radiation source detection (TriRSD), sequential probability ratio test (SPRT), source-attractor radiation detection (SRD) [
10] and the particle filter (PF) [
11,
12]. In [
9] a MLE algorithm could estimate the localization of a 189 kBq
137Cs source with an accuracy of 0.53 m from the measurements of five
5.1 cm × 5.1 cm NaI(Tl) detectors (fixed network) considering a 5 × 5 × 5 m
3 parameter space and an interval of 3 min. For a source of approximately 22.6–34 MBq, the authors predict a 1 s measurement time for the source localization. In [
12], the use of a PF algorithm allowed the authors to estimate the 281 kBq
137Cs source localization with accuracy of 1.5 m (in a 10 × 10 m
2 area) using the available experimental data from the intelligent radiation sensor systems (IRSS) tests of 22 stationary
5.1 cm × 5.1 cm NaI(Tl) scintillators (measurement time of 5 min).
A shipping container screening system must feature the highest possible true positive rate (TPR, related to the detection sensitivity), and at the same time, the lowest false-positive rate (FPR). To reduce the FPR, it is necessary to distinguish the radiological and nuclear threats from naturally occurring radioactive material (NORM) (40K, uranium and thorium decay series present in some materials), medical isotopes or at a smaller scale background variation.
Another cause for concern is the procurement of the chemical elements, compounds of mixtures used by the deployed radiation detection system and technology. Due to the worldwide shortage of the isotope
3He, it is necessary to find an alternative technology for the neutron-detection systems. Some security-related requirements for the replacing technology are: (i) high neutron detection efficiency; (ii) ability to detect both fast and slow neutrons, as neutrons might be attenuated by some shielding or by the cargo materials; and (iii) the lowest possible gamma-ray sensitivity (to avoid false alarms) [
13].
1.3. Mobile Radiation Detection Systems
As previously mentioned, in security scenarios, we are interested in detecting gamma rays, beta and alpha particles and neutrons. However, due to their long range in air, the detection of gamma rays and neutrons is preferable for mobile radiation detection systems. Since the range in air of the beta particles of
90Sr and
90Y are in the order of some meters (maximum beta range in air of
90Y is approx. 10.6 m) [
14], a mobile beta particle detection system should also be considered in platforms that operate near to the ground, such as cars, multirotors and handheld equipment.
According to [
15], in illicit traffic of nuclear and other radioactive materials scenario a combination of gamma-ray and neutron detection systems are normally used. Due to the large stand-off distances, possible weak and/or shielded radioactive sources, large detection systems (∼1 m
2) are used. In order to transport these radiation detection systems and contextual sensors, mobile platforms such as cars, vans and trucks are used. Examples of projects which developed a combination of radiation detection systems include the radiological multi-sensor analysis platform (Rad_Map) [
16,
17], the sistema mobile per analisi non distruttive e radiometriche (SLIMPORT) [
18], the modular detection system for special nuclear material (MODES_SNM) [
19], the mobile urban radiation search (MURS) [
20], and the real-time wide area radiation surveillance system (REWARD) [
21,
22,
23,
24]. In MODES_SNM, the detection system was also tested in the scanning of maritime containers as a primary control device (next to RPMs), as a secondary control (inspection of containers that already triggered an alarm in a RPM) and by using radioactive samples for identification purposes at Rotterdam seaport. Difficulties related to natural background variation were reported. The system was able to detect and identify gamma-ray sources and NORM, as well as neutron sources such as
252Cf,
241Am–beryllium (hereafter designated Am-Be), Pu-Be, SNM (Pu and U samples) and the presence of hydrogenated or lead shielding [
19]. The use of a dual-mode Cs
2LiYCl
6 (CLYC) scintillator with
6Li (simultaneous detection of gamma-rays and thermal neutrons by using pulse shape discrimination techniques) allows compact and lightweight detection systems which can be coupled with a multirotor [
25,
26,
27,
28]; however, the sensitive volume has only 12.86 cm
3.
Table 1 summarizes the main characteristics of mobile radiation detection systems used in security scenarios (in some cases also applied to radiation safety scenarios) such as area monitoring, mapping and source localization and identification in urban environments.
A network of low-cost mobile detectors with georeferenced data was also proposed for source localization in an urban environment [
29].
Table 1.
Combination of mobile radiation detection systems used in security scenarios.
Table 1.
Combination of mobile radiation detection systems used in security scenarios.
| Gamma-Ray Detection System | Fast/Thermal Neutron Detection System | Mobile Platform | Project/Ref. |
|---|
| NaI(Tl) imager; HPGe | EJ-309 liquid scintillators (fast) | Truck | Rad_Map [16,17] |
| NaI(Tl) 1; LaBr3(Ce) | NE-213 liquid scintillator (fast); 3He proportional counter (thermal) | Not specified | SLIMPORT [18] |
| Xe scintillator | 4He scintillator (fast); 6Li-lined 4He tubes (fast and thermal) | Van | MODES_SNM [19] |
| NaI(Tl) | 6LiF (thermal) | Car | MURS [20] |
| - | EJ-309 liquid
scintillator (fast); BF3 and 3He detectors with HDPE (thermal) | Truck | [30] |
| Two stacked 1 cm3 CdZnTe (CZT) | Thin planar silicon PIN diodes covered with hydrogenated plastic radiators (fast); Silicon backfilled with 10B (thermal) | Not specified | REWARD [21,22,23,24] |
| CZT (1 cm3); CLYC with 6Li 2 | CLYC with 6Li (thermal) | Multirotor | [27,28] |
| CLYC with 6Li 2 | CLYC with 6Li (thermal) | Multirotor | [25,26] |
The choice of the right mobile platform for the radiation detection system will have an impact on the radiation measurements’ quality and effectiveness. Some requirements that should be considered when selecting the mobile platform are the weather sensitivity, payload capacity, cost, ease of operation, and spatial resolution obtained during radiation mapping measurements. The mobile platform can be ground based (terrestrial or maritime), air based or hybrid, and each of them can be manned or unmanned (teleoperated, semi-autonomous or autonomous operation). The use of unmanned platforms allows us to avoid unnecessary radiation exposure risks to humans, perform autonomous mapping and monitoring, and is a more cost-beneficial solution than manned platforms [
15].
The ground-based platform solutions have the advantage of greater payload capacity and autonomy; however, obstacles on the ground can limit their operation and normally require greater data-collecting times compared to air-based platforms [
15].
The use of an unmanned aerial vehicle (UAV), such as a multirotor (also known as a drone), to carry a small unmanned ground vehicle (UGV), could help to overcome the obstacles on the ground (e.g., emergency scenarios) and then the UGV could perform the survey in greater detail [
31].
The literature also refers to the combined use of an UAV and an UGV (cooperative operation). To improve the path planning and hotspot localization of the UGV, the UAV could provide photogrammetry (3D terrain reconstruction) and a broader area radiation mapping [
32]. In [
33], the use of an UGV to improve the navigation accuracy of an UAV is also described.
Unlike manned aircraft, UAVs allow operation at lower altitudes and speeds, improving the spatial accuracy in radiation measurements. The advantage of using multiple low-cost UAVs (e.g., cooperative radioactive search or a swarm of UAVs) over a single-UAV approach was also demonstrated for low-altitude source localization and contour mapping, in particular for urgent radiation detection (e.g., emergency scenario) and for large areas [
34,
35,
36]. Challenges in security and safety scenarios (e.g., nuclear accident mitigation) such as all-terrain and confined spaces operation (e.g., mountain or urban areas) and the search for low-activity sources can be overcome with the use of multirotor platforms [
35]. Multirotors are easy to operate, are very maneuverable, and have vertical take-off and landing (VTOL) and hovering capabilities; however, their payload is limited to a few kilograms [
15].
Recent literature refers to the use of compact gamma-ray detection systems coupled with multirotors, normally to obtain radiation mapping of contaminated areas, such as areas near to the Fukushima Daiichi Nuclear Power Station (FDNPS) or legacy uranium mines, as well as to detect, localize and identify radioactive sources (
Table 2). CZT is the most commonly used detector, but its small volume limits its use for weak or shielded gamma-ray sources (small solid angle). A good alternative to CZT is, for example, the inorganic scintillator CsI(Tl) with SiPM readout; however, a commercial SIGMA50 detector is limited to 32.8 cm
3 and the energy resolution is 7.2% at 662 keV [
37,
38]. The use of a SiPM-based scintillator was also demonstrated for the detection of radioactive sources in scrap metal (waste and recycle material monitoring) when strong magnetic fields (0.1 T) are present [
39]. Due to its high density and atomic number, BGO detectors are very sensitive to gamma rays; however, they feature poor energy resolution and are very heavy (a total sensitive volume of 206 cm
3 weights 4 kg).
Multirotors are also referred in the literature as a platform suitable for carrying lightweight Compton cameras (gamma-ray imaging); however, they are used in radiation safety scenarios, and the measurements were obtained inside radioactive contaminated buildings of the FDNPS (with significant radiation intensity) [
56,
57].
In [
15] the use of multiple UAVs was suggested, firstly to detect and localize a radioactive source(s) using plastic detectors (poor energy resolution but low price) and afterwards, in a second phase, to use an inorganic scintillator for identification purpose. Moreover, plastic scintillators are lighter materials and can be manufactured in several shapes so that they can be used in small platforms with payload restrictions such as multirotors. In
Table 3, some advantages and limitations of plastic scintillators are highlighted.
The use of high-Z sensitized plastic scintillators using organometallics or nanocomposites is an active research area. Considering the use of organometallics, the addition of bismuth to the plastic scintillator formulation improves its spectroscopy capability but degrades the light yield. The use of iridium complex fluors improve the light yield of plastic scintillators for counting purposes [
58].
In order to convert the scintillation light produced by the interaction of gamma rays and charged particles (primary or secondary) within the detection sensitive volume into electrical signals, silicon photomultipliers (SiPMs) are quickly replacing the photomultipliers tubes (PMTs) technology, in particular for mobile applications [
15]. Unlike PMTs, SiPMs are very compact, lightweight, require low bias voltage (normally 5 V), low power consumption and are immune to magnetic fields interference.
In this work, a novel radiation detection system is proposed, consisting of:
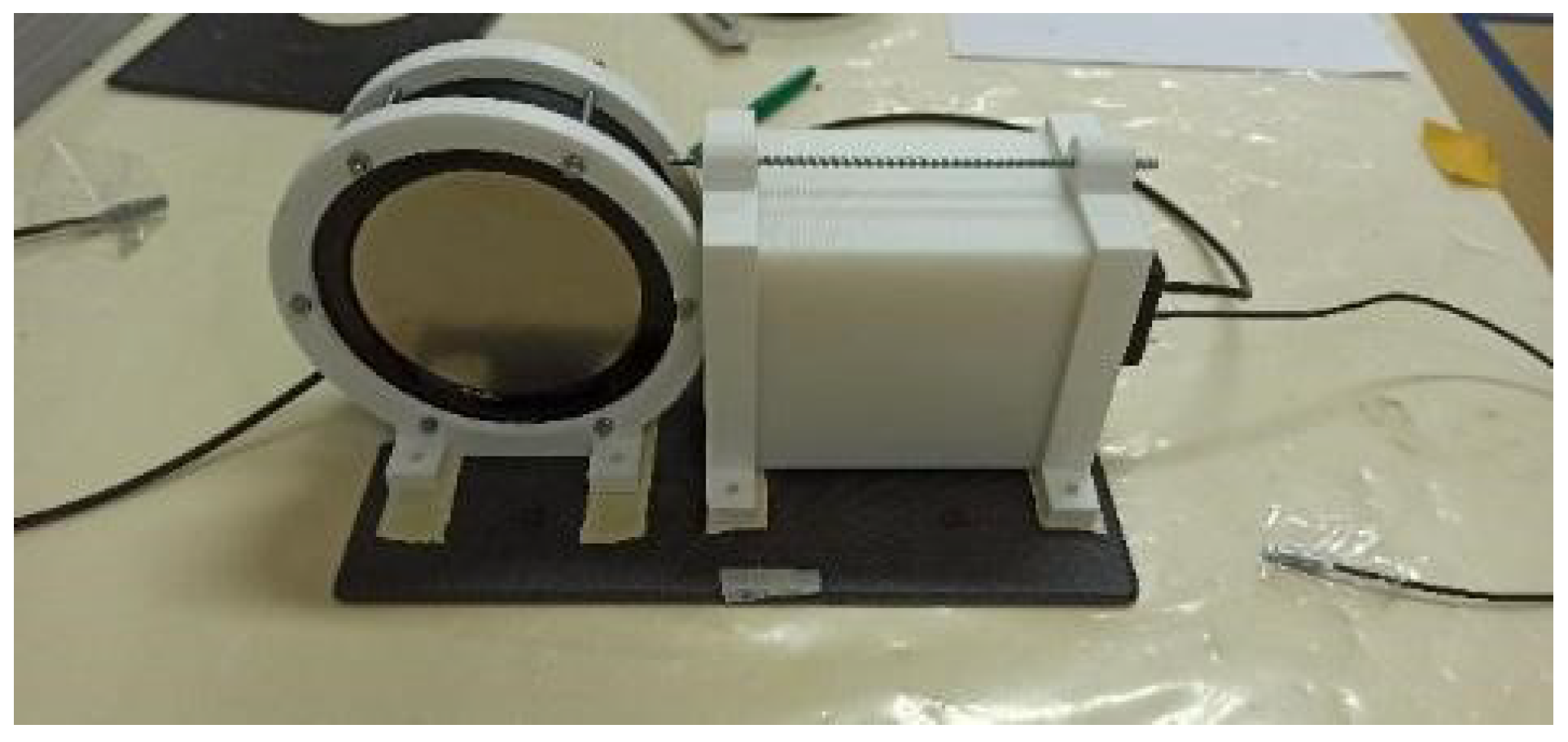
A larger cross sectional area EJ-200 plastic scintillator for gamma-ray and beta particles detection (improving solid angle in measurements performed at a distance, instead of the heavy, smaller and more expensive semiconductors and inorganic scintillation crystals);
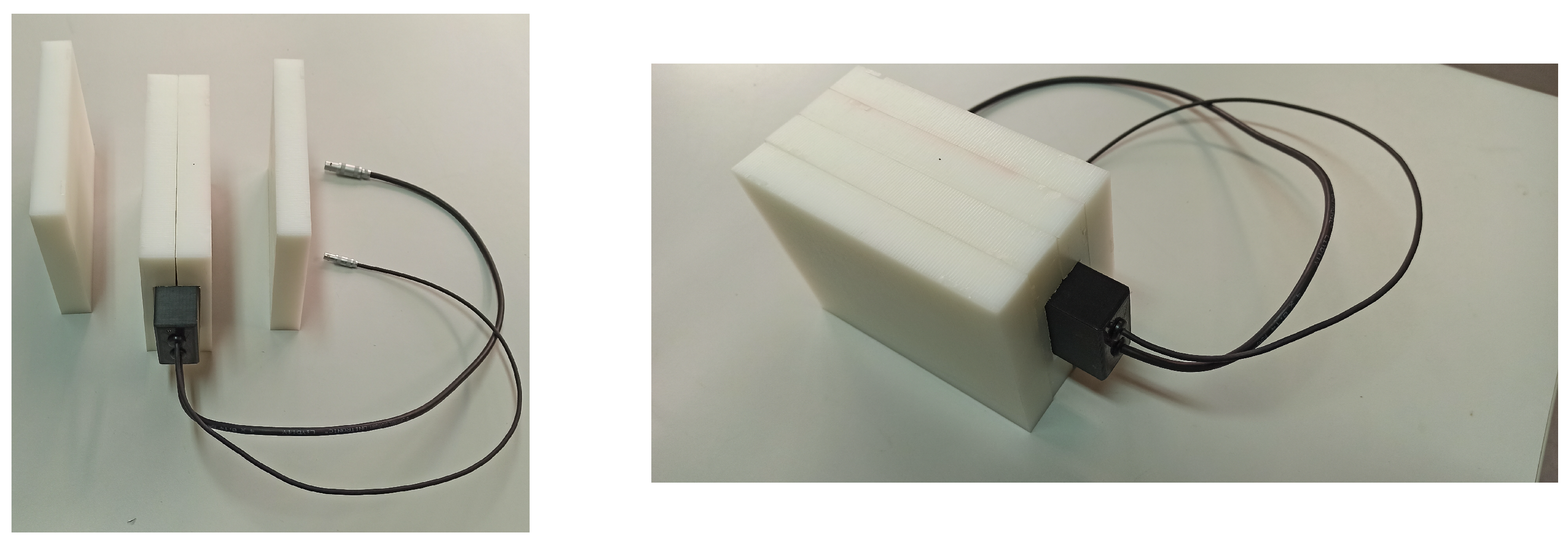
A plastic scintillator EJ-426HD with 6Li content. A compact and modular high-density polyethylene (HDPE) moderator for neutron detection (thermal and fast component) was added;
SiPM readout for both plastic scintillators;
A highly maneuverable multirotor platform used to carry the radiation detection system. This platform allows hovering, VTOL and offers the ability to fly at very low altitudes and speeds. By reducing the source–detector distance, an increase in the overall geometric detection efficiency is also obtained;
Able to simultaneously detect gamma rays, beta particles and neutrons, as well as to perform source characterization and localization.
The mobile radiation detection system is composed of a 110 mm × 30 mm EJ-200 plastic scintillator (285 cm3) and a EJ-426HD (with 6Li content) plastic scintillator with a modular HDPE moderator sheets, both with SiPM readout, that were developed and tested by the authors for screening shipping-container cargo.
The working principle of a neutron detection system based on the
6Li isotope is related to the following thermal neutron capture reaction (cross section of 940 barns) [
59]:
To the best of the authors’ knowledge, no work has been carried out using plastic scintillators with SiPM readout coupled with a multirotor for the screening of shipping-container cargo.
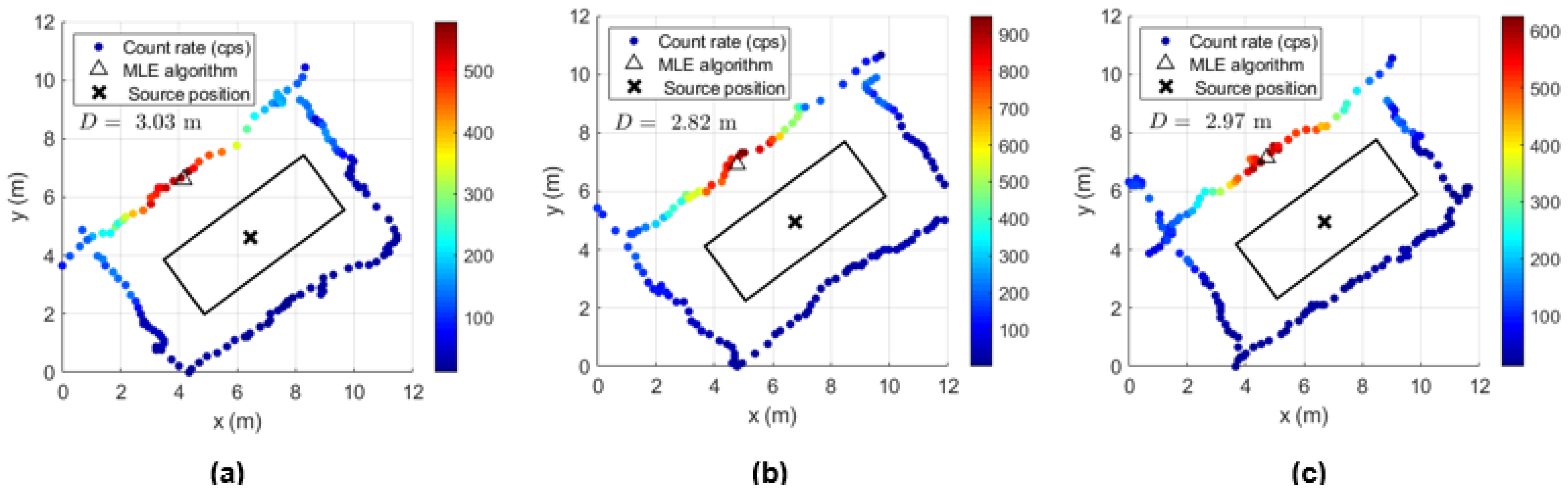
The proposed mobile radiation detection system can be used to detect and localize SNMs and other radionuclides inside shipping containers, acting as the primary inspection device (as an alternative or complement to RPMs) or as secondary inspection device when the container triggers an alarm at RPMs and is subject to a more exhaustive search (currently performed by handheld equipment). For a fast detection on the primary inspection phase a lateral wall screening of the container (drone at half the height) will be performed and tested with a time to inspect lower than 50 s. If more time is available for the inspection, for example in a secondary inspection, the following characteristics will be assessed: (i) the benefits of lateral wall screening of the container at different heights or; (ii) a complete turn to the container will also provide information about the source localization inside the container using a maximum likelihood estimation (MLE) algorithm. It must be highlighted that the secondary inspection performed by the developed mobile radiation detection system (few minutes) allows a significant time reduction compared to the inspection performed by handheld equipment, and avoids unnecessary exposure risks to humans.
Compared to other mobile radiation detection systems, this solution presents advantages such as lower costs, compactness, light weight (and consequently, more flight time available), an increase in overall detection efficiency due to the significant increase in the geometric detection efficiency and source–detector distance reduction (using a multirotor).
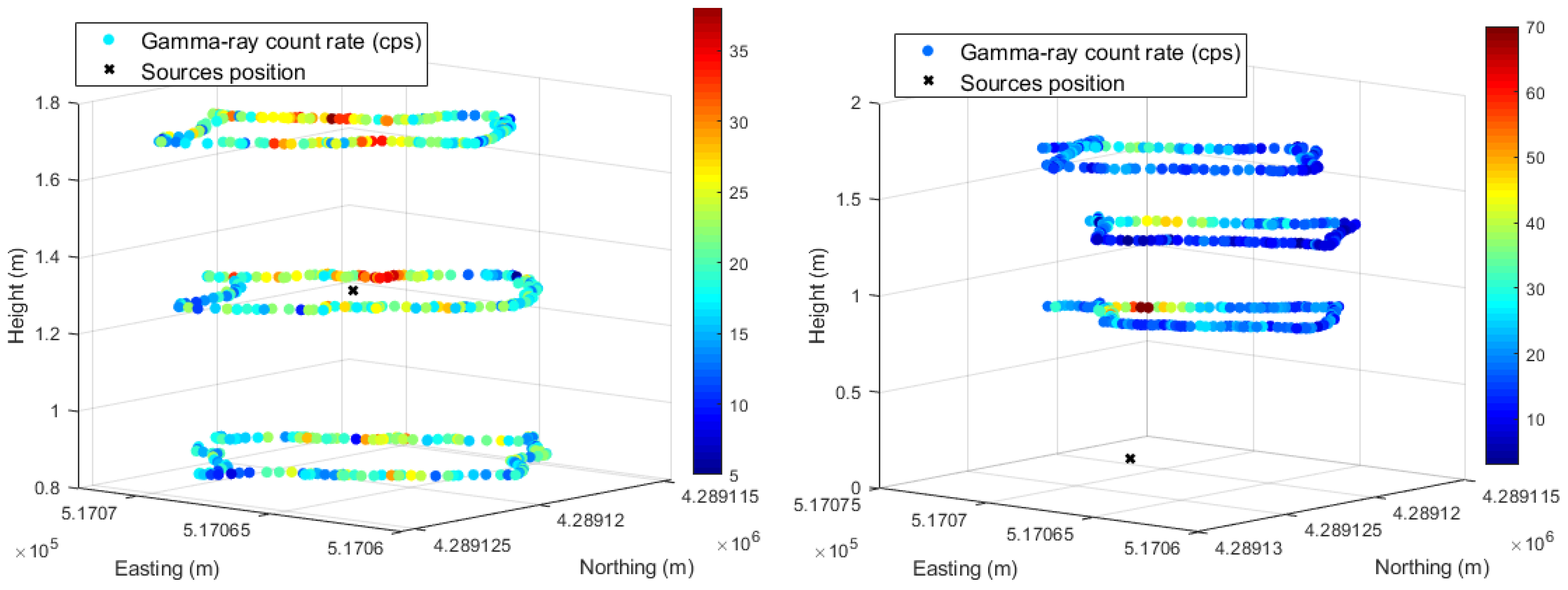
This detection system can also be used to screen other infrastructures (e.g., urban environments) or vehicles. If the detection system is reoriented 90°, it is possible to map contaminated areas and search for lost sources on the ground. The first results showed that the mobile radiation detection system can detect and localize a 4 MBq 137Cs source within one meter, and can detect a mixed source with 1.45 GBq Am-Be and 215 MBq 137Cs (shielded or not) placed inside a shipping container.



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




























