1. Introduction
In a previous study, water level (WL) fluctuations in the Kaunas hydropower plant (HPP) reservoir were analyzed [
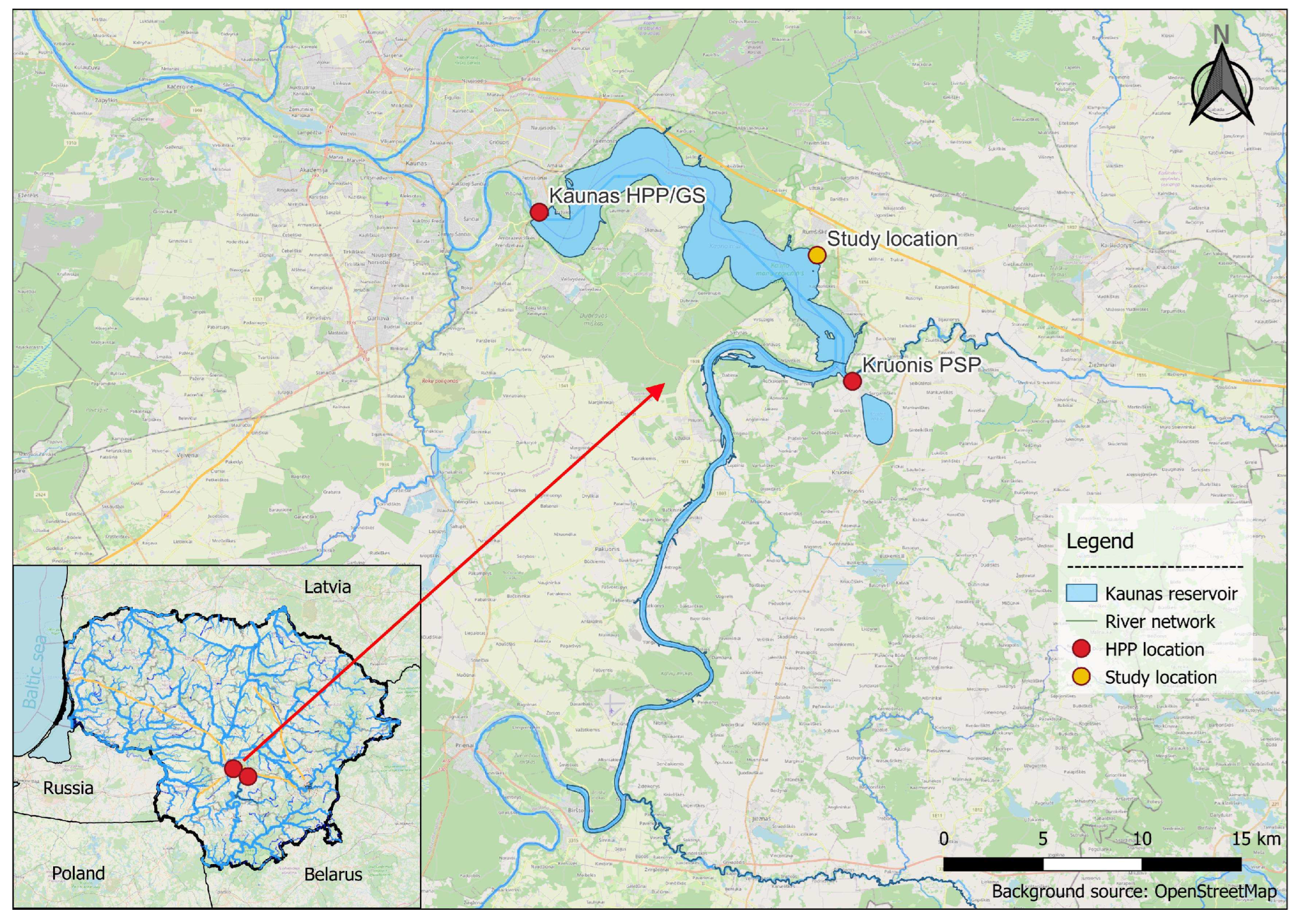
1]. It was found that the operations of the two large HPPs cause frequent short-term water level fluctuations. Daily drawdowns (the difference between min and max WL) range up to 0.4 m/day. These water level fluctuations frequently result in dewatered areas in the littoral zone of the reservoir. To observe and analyze these dewatered areas, a bathymetric survey was carried out.
The Kaunas HPP reservoir is situated on the East European Plain. The littoral zone (the nearshore area) of the reservoir is generally shallow with gentle slopes. It is a multipurpose reservoir, which is mainly used for power generation by the Kaunas hydropower plant and Kruonis pumped storage hydropower plant (PSP); however, it is also used for recreation, navigation, irrigation, industrial water supply, flood management, and recreational fishing [
2]. Frequent water level drawdowns have a negative impact on the environment, which is discussed in many studies. Aquatic ecosystems in the reservoirs are sensitive even to small water level changes. Scientists claim that when water levels fluctuate in reservoirs with shallow and gently sloping littoral slopes, they experience a greater magnitude of water quality change than those with steep slopes [
3]. In a review of the ecological impacts of winter water level drawdowns on lake littoral zones, many different ecological issues were discussed [
4]. Water level fluctuations can have adverse effects on the environment, most notably on hydrologic and biotic processes, ranging in magnitude from the microscale to landscape level. Dewatered areas that are exposed during drawdown operations are susceptible to sediment desiccation and erosion from precipitation, and wind/wave action consolidating the exposed sediment layer [
5,
6], which increases the sediment bulk density. A study of Newnans Lake, a eutrophic lake in Florida, showed that short-term drawdowns can greatly accelerate erosion of the fine littoral substrate [
7]. A relatively low rate of water drawdown and refill may enhance erosion by increasing the exposure time to wind/wave energy [
8]. In reservoirs, these processes typically create barren shorelines with low habitat diversity and low species richness. Furthermore, they are likely to accelerate eutrophication processes and increase the risk of cyanobacteria blooms [
9].
The littoral zone provides a spawning habitat for fish and water birds [
10]. It is a physically complex system containing macrophytes, coarse woody debris, and other refuge for fish, which mediates competition and predation [
11,
12]. Although natural water level fluctuations are necessary for the aquatic ecosystem structure and function, water level regulation that exceeds natural variability may be very harmful to ecosystems in reservoirs [
10,
13]. Water level regulation and related habitat losses due to dewatering threaten ecosystem functioning and biodiversity in reservoirs [
14]. Water level drawdowns tend to reduce benthic invertebrate density in the dewatered zones [
15] as invertebrates are not particularly mobile, and they often become stranded and die from asphyxiation and desiccation [
16]. All these factors tend to influence the abundance, density, and diversity of fish. Decreased fish growth rate, biomass, and abundance correlate with the losses of littoral physical habitat complexity [
17]. Water level drawdown is a threat to fish species that use the littoral zone for all or part of their lives, especially in the spawning season [
13,
18]
The most abundant fish species in the Kaunas HPP reservoir belong to the phytophilic ecological group of fishes. It was determined that the main fish species whose spawning conditions may be affected by the fluctuating water level in the Kaunas HPP reservoir are pike, common roach, perch, and bream [
19]. They usually spawn in the shallow areas of the reservoir, which contain aquatic macrophytes (where the water depth ranges from 0.2 to 2 m). Regulated water level fluctuations (e.g., rises and recessions) during spawning can negatively affect juvenile fish densities [
20]. The Kaunas HPP reservoir operation rules are in force to mitigate the impact on the ecosystems and secure other reservoir stakeholders’ needs [
2]. One of the most important issues is the assessment of dewater areas in fish spawning sites during the spawning period. Despite the wide scope of this issue, very few studies provide quantitative evaluations of the dewatering areas during short-term WL drawdown operations, which occur in hydropower plant reservoirs with shallow nearshore zones. Knowledge of potential fish spawning site locations, how they change in space and time, and how water level fluctuations affect the area is crucial for the optimal usage of reservoirs in terms of simultaneously increasing power generation and protecting the environment where it is most vulnerable. In previous research, a detailed traditional bathymetric survey of an area containing several potential spawning grounds (about 5 ha) was carried out. The water depth was measured with a water measuring pole with markings every centimeter and a plate on the bottom to prevent it from sinking into the sediment. A special iron weight attached to a graduated lead-line was also used to verify the results. The exact position of each measurement was collected with the Trimble R6 GNSS receiver. The point positioning accuracy using LitPOS RTK was 3–5 cm in the horizontal axis and 5–8 cm in the vertical axis. In total, over 1000 measurements were taken, elevation profiles were drawn, and a digital elevation model (DEM) was generated using the Kriging interpolation method, which was determined as the most suiting after statistical analysis of the accuracy of different interpolation methods. DEM was used for shoreline derivation and evaluation of the dewatering area in the selected fish spawning sites during different stages of HPP operation [
1]. Traditional bathymetric surveys can provide reliable data concerning the selected area, but their application is limited as this kind of survey is challenging in difficult conditions.
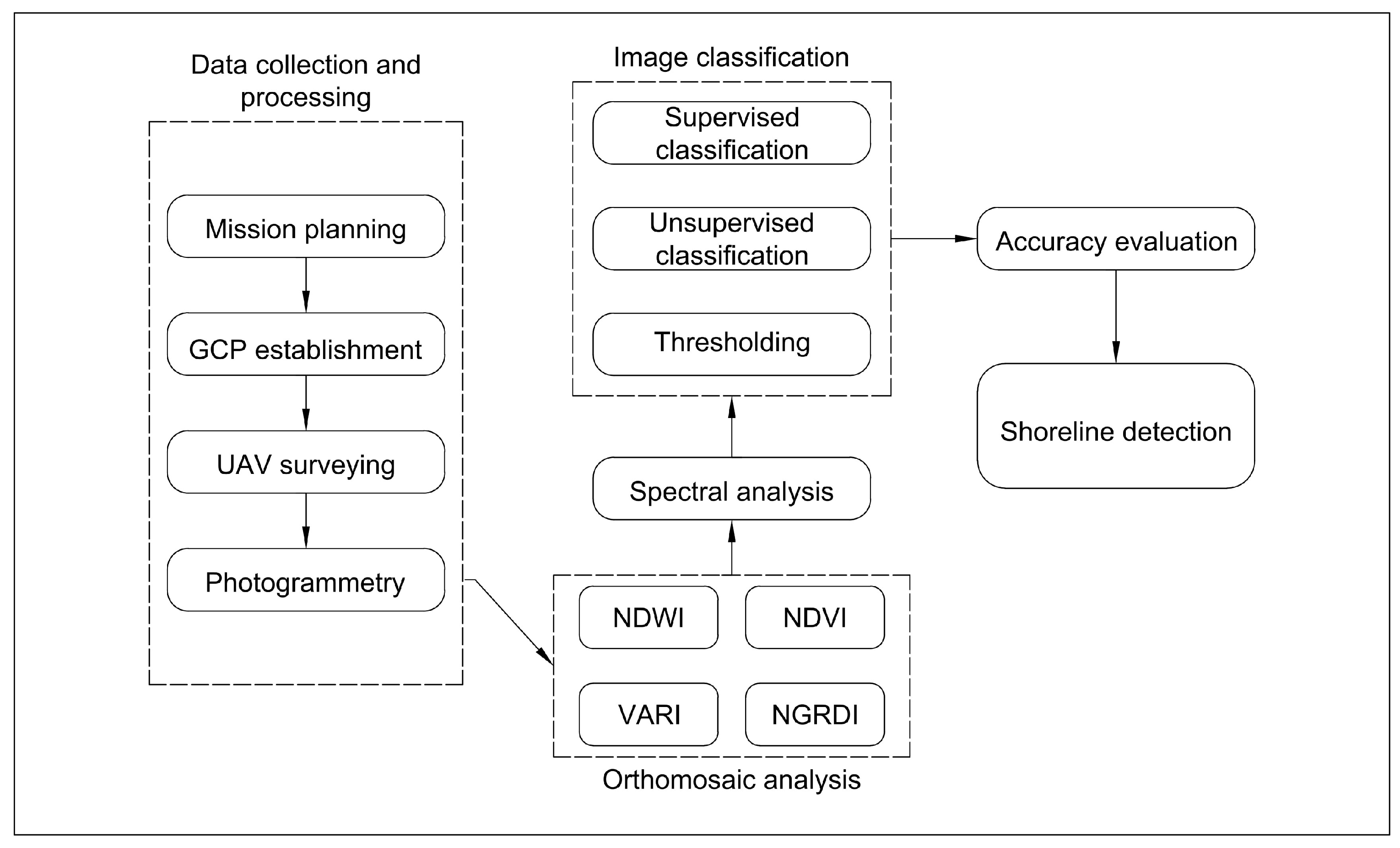
The main focus of this study was to implement remote sensing (RS) techniques to track changes in drawdown areas in potential fish spawning sites. With the fast development of RS technologies, software, and the popularity of drones, surveying difficult areas has become easier and more accessible. Surveying with drones is a cost-effective and time-efficient method to collect data from the air, providing imagery or point cloud data from which a variety of deliverables can be extracted. According to various sources, data can generally be captured five times faster with drones than with traditional land-based methods [
21,
22]. For these reasons, several missions were carried out using Unmanned Aerial Vehicles (UAVs) to collect data from the aforementioned selected potential fish spawning sites at various water levels in the reservoir. After data collection, processing, and the analysis steps, the results were compared with the data gathered in the traditional field survey from the previous study.
Studying reservoir drawdown areas is a complex task, and several different approaches can be implemented. Different drone surveying methods for high-resolution river landscape mapping of the Belá River in the northern part of Slovakia were discussed in [
23]. Three imaging methods for 3D model creation of the study area were used: (i) nadir, (ii) oblique, and (iii) horizontal. This minimized geometric error and captured topography under the treetop cover and overhanging banks. The article by [
24] assesses the accuracy of UAV data processing using different software applications (Microsoft Photosynth, Agisoft PhotoScan and ARC3d) and discusses different processing schemes and validation strategies.
After data acquisition, processing, and validation, the resulting orthomosaic images can be used to detect the reservoir shorelines. A comparison of the shorelines detected at different stages of the HPP operation indicate the dewatered areas. There are many studies using various remote sensing techniques for shoreline detection. Moreover, various techniques have been used for different RS data sources. Satellite images (Sentinel, Landsat, etc.), data collected by Light Detection and Ranging (LiDAR), and aerial photography from the planes or UAVs were used in previous studies, some of which are discussed in
Section 4. In a review of shoreline detection using optical RS carried out by [
25], different water segmentation techniques were discussed and some were implemented in this study.
Spectral reflections from different surfaces are the key to the techniques used in this study. In 1996, McFeeters introduced the Normalized Difference Water Index (NDWI), which makes use of reflected near-infrared (NIR) and visible green light radiation for assessing quantity (e.g., the surface area) and quality (e.g., the turbidity) of water resources [
26]. Hanqiu Xu modified the NDWI by substituting middle-infrared for near-infrared radiation in the NDWI in order to enhance open water features while efficiently suppressing and even removing built-up land noise and soil noise [
27]. Indices can be used to obtain a simplified data representation by separating and highlighting different surfaces from one another. Another commonly used index is the Normalized Difference Vegetation Index (NDVI). The NDVI is calculated by measuring the difference between near-infrared (which vegetation strongly reflects) and red light (which vegetation absorbs). It is able to quickly delineate vegetation and vegetative stress, which has many uses in commercial agriculture and land-use studies [
28]. In our case, this was also useful for indexing water, because infrared radiation is strongly absorbed by water and thus it can easily be identified by the low (close to zero or negative) NDVI values. Moreover, this index helps to separate aquatic and land vegetation.
Part of the study was carried out with a drone equipped with a simple RGB camera. Data of NIR were unavailable for these datasets; the NDVI and NDWI could not be calculated. Different combinations of red, green, and blue bands were used to separate water, aquatic, and land vegetation. The purpose was to establish the best-performing technique as compared to methods that rely on NIR. In this way, the technique could be adopted for datasets that only contain red, green, and blue bands, which correspond to the visible part of the electromagnetic spectrum and can be captured with a simple camera sensor. The Visible Atmospherically Resistant Index (VARI) and the Normalized Green–Red Difference Index (NGRDI) indices using only the visible range of the spectrum were calculated. The VARI was proposed by [
29] for remote vegetation fraction estimation. The index was found to be minimally sensitive to atmospheric effects, allowing for vegetation fraction estimation with an error of <10% in a wide range of atmospheric optical thicknesses. In addition, the NGRDI was used in comparison with the NDVI for highlighting water. The NGRDI is similar to the NDVI, but uses green instead of NIR bands [
30].
This research differs from others in the following ways: We are interested in changes in the submerged area in potential fish spawning sites, which means that the shoreline must be detected in areas containing aquatic macrophytes. In areas that are clear of aquatic vegetation, many known techniques, as discussed above, can be implemented; however, in the areas with thick water vegetation, it is very difficult to detect and segment water. Therefore, the best methods and indices to achieve this were evaluated.
A spectral signature analysis was carried out for aquatic and land vegetation in order to separate one from the other. This means that potential fish spawning sites could be detected over the entire reservoir and their area could be calculated. This knowledge would allow us to locate the most vulnerable areas and estimate how much water level fluctuations affect them. A similar study of spectral signatures was conducted for automatic blackgrass weed mapping using a supervised classification technique [
31]. A number of advanced techniques were used: feature generation to enhance the feature discrimination ability, feature selection for dimension reduction, Random Forest (RF) for classification, and guided filter for spatial information enhancement.
The aim of the study was to implement modern remote sensing techniques to investigate dewatering areas in the fish spawning sites. Current assessments of spawning sites in the reservoir are mostly based on studies that were carried out in the 1990s. Surveying fish spawning sites is typically a difficult task that is usually carried out by performing manual bathymetric measurements due to the limitations of sonar. Majority of the devices based on echo-sounding (sonar) cannot operate in the shallow waters containing aquatic macrophytes—the typical spawning sites for many species of fish. Our hypothesis is that RS can be used to assist in surveying difficult and vulnerable areas, where the current and accurate data are needed. This knowledge could assist in making decisions for better use of reservoir storage while increasing power generation.
Various tasks were set for this study:
To review current practice related to reservoir drawdown/hydropower operating rules and policies;
To conduct surveys of the study area using remote sensing methods;
To detect shorelines during different stages of reservoir operation;
To evaluate the effectiveness of different methods of shoreline detection in various nearshore conditions;
To analyze the spectral signatures of aquatic macrophytes and to evaluate the possibility of implementing the results for automatic classification over the entire Kaunas HPP reservoir;
To summarize the findings in order to provide insights for deriving the optimal operating rules for the reservoir.
3. Results
3.1. Shoreline Detection Using Remote Sensing Techniques
The different shoreline detection techniques exhibited different strengths and shortcomings when appd in different conditions. A comparison of the resulting shorelines is presented in
Figure 3.
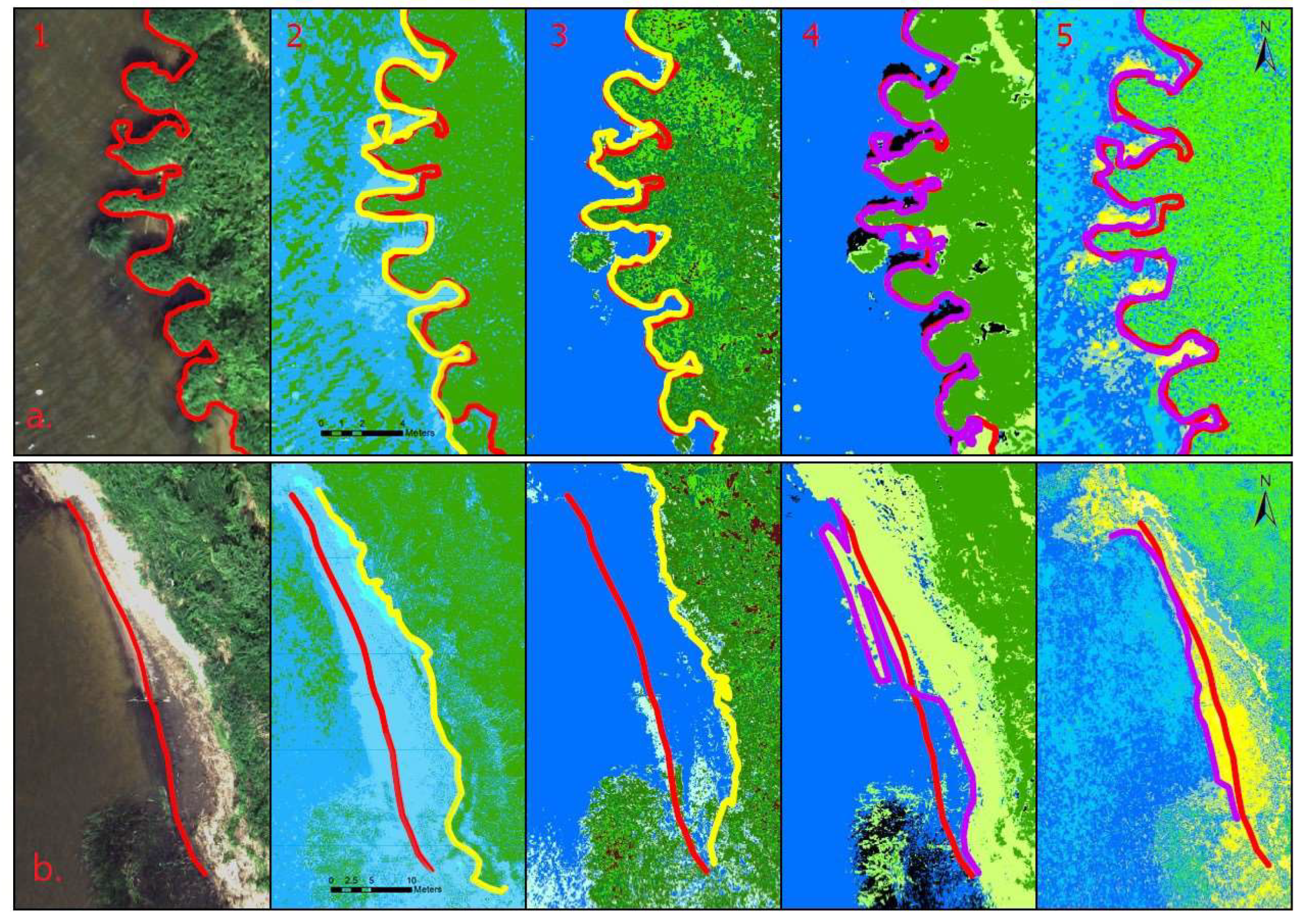
The first set of pictures was the orthomosaics of the two selected locations (a and b). The shorelines were detected by visual inspection from high-resolution orthomosaic images and are shown as the red line. This remains in all the other pictures as a reference. The second set of pictures is the classified NGRDI pictures using unsupervised classification. The algorithm detected five different classes, which is the same outcome as that of the VARI raster image classification. Overall, the outcome of the NGRDI and VARI unsupervised classification was essentially the same, and NGRDI was chosen for further investigations as it is easily readable, where values range from −1 to 1. The outcome of the classified NGRDI/VARI raster images was the worst. There was a great deal of noise (incorrectly classified pixels) in the water and land areas. In the first location (a), the shoreline was the least defined, and in the second location (b), the algorithm was unable to separate water from the wet sand on the shore. The third set of the pictures is classified images of NDVI and NDWI values. In both cases, the unsupervised classification algorithm (ISO clustering) detected seven classes and both outcomes were very similar. The NDWI represented water with a little less noise as it is designed to do, but overall, in this case, the two techniques were essentially interchangeable. The use of the NIR band helped to separate water from the vegetation. In the first location, the shoreline was best defined and the shadows did not have an impact on the outcome. However, in the second location, this method was unable to separate the water from the sand. Bare wet sand absorbs NIR in a similar manner to water. In both cases, the difference in the indexed values was not enough to separate wet sand from water. The fourth set of pictures was classified orthomosaic. The algorithm detected five different classes. Unlike in the other cases, it separated a class for shadows (dark areas). The noise in the classified pictures was average. The algorithm was considering the entire light reflectance spectrum captured by the camera and was able to separate water from sand, assigning it a different class. However, this was not done accurately, i.e., the area with silt on the sand was assigned to the water class and the shallow part of the reservoir with sand on the bottom was assigned to sand. The resulting shoreline in the shallow part of the reservoir was not accurate.
The assessment of accuracy and quality of unsupervised image classification was carried out to determine the best-suiting indices for highlighting water. The results of accuracy evaluation are provided in
Table 2.
The accuracy assessment showcased that the best index for water identification was NDWI, which was to be expected. NGRDI showed to be a valuable option of water and vegetation identification if NIR is not available. It has performed well at OA of 92% and KC 0.837, which is according to categorization of the Kappa statistic—almost perfect [
43]. These indices showcase classification ability to separate vegetation from the water area. It is the most important part in our study as in most cases shoreline marks the transition between land vegetation and the water area. But there are other surfaces that are difficult to classify—sand (wet and dry) and areas containing aquatic macrophytes. These surfaces are too heterogeneous to calculate OA and KC.
The accuracy assessment of the classification of the forementioned surfaces was done by careful visual inspection. To improve the classification accuracy, the thresholding technique was applied for the NGRDI, NDWI, and NDVI raster images. This technique allowed us to assign an interval of index values to different classes. This technique allowed us to fine-tune the results, to study the index values of certain areas, and to assign their range to a different class. Thresholding the NDVI and NDWI allowed us to separate sand, but the part with the silt on the sand had no distinguishable difference from the water. Thresholding the NGRDI was promising. The index is calculated from the reflections of the wavelengths in the red and green spectrum and was able to separate sand from water relatively well (see the fifth set of images in
Figure 3). The dark areas in the images were the weak points, with the very dark and very bright areas having similar index values. In some cases, this can denote dry areas, such as sand, and other times shady areas, which could also be water, and both areas will have a very similar index value. Such areas must be doublechecked and conscious decisions must be made. Overall classification of raster images with NDWI values can be used to automatically detect shorelines, but it would not work accurately if the shores were very shallow and sandy. Other indices and methods are just a tool to help highlight water from other areas, but the shorelines should be defined manually. The NIR spectrum gives more information about the surfaces and is not affected by shadows to the same extent. The results indicate that orthomosaics containing the visual RGB spectrum can also be used for shoreline detection coupled with the thresholding technique.
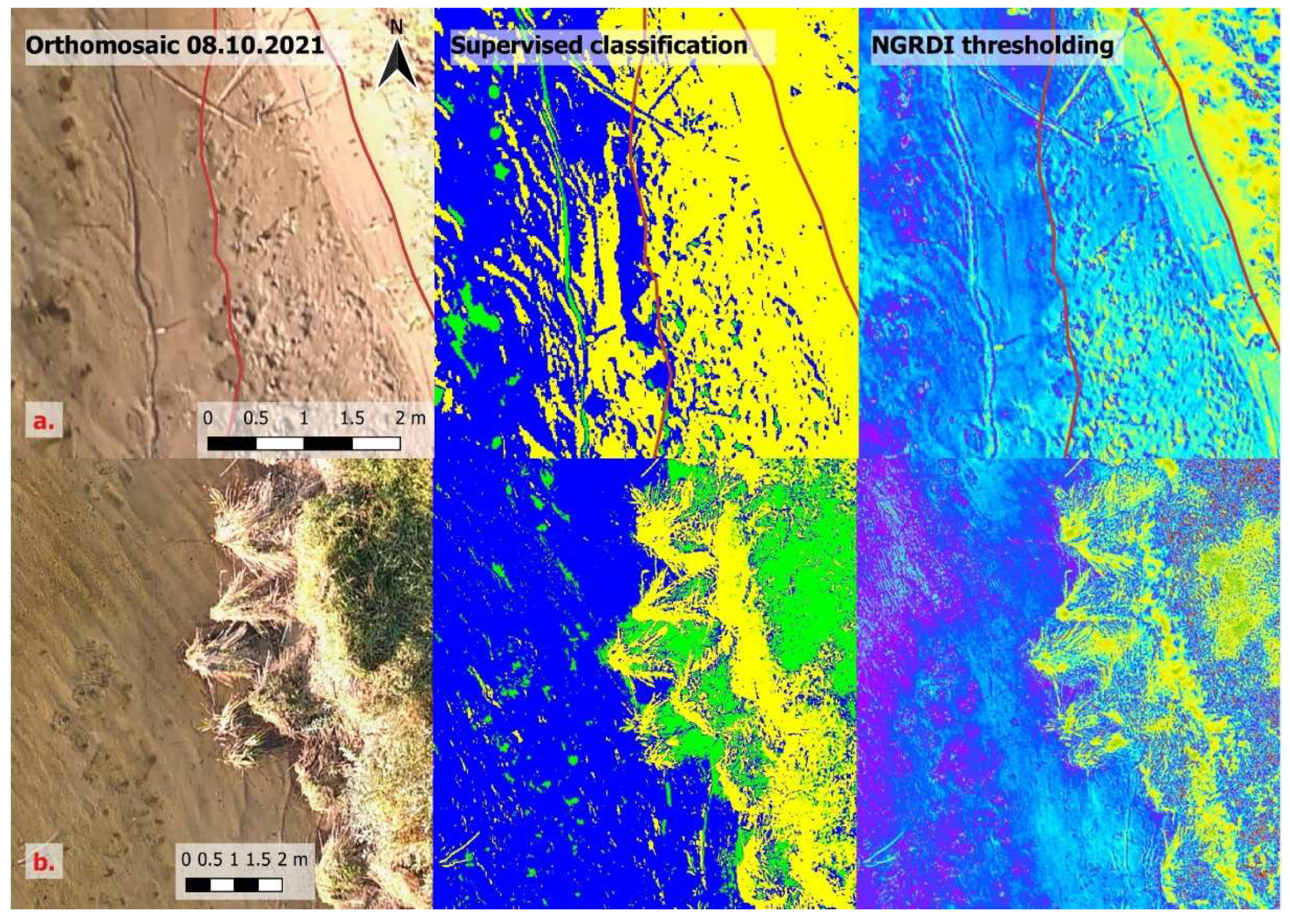
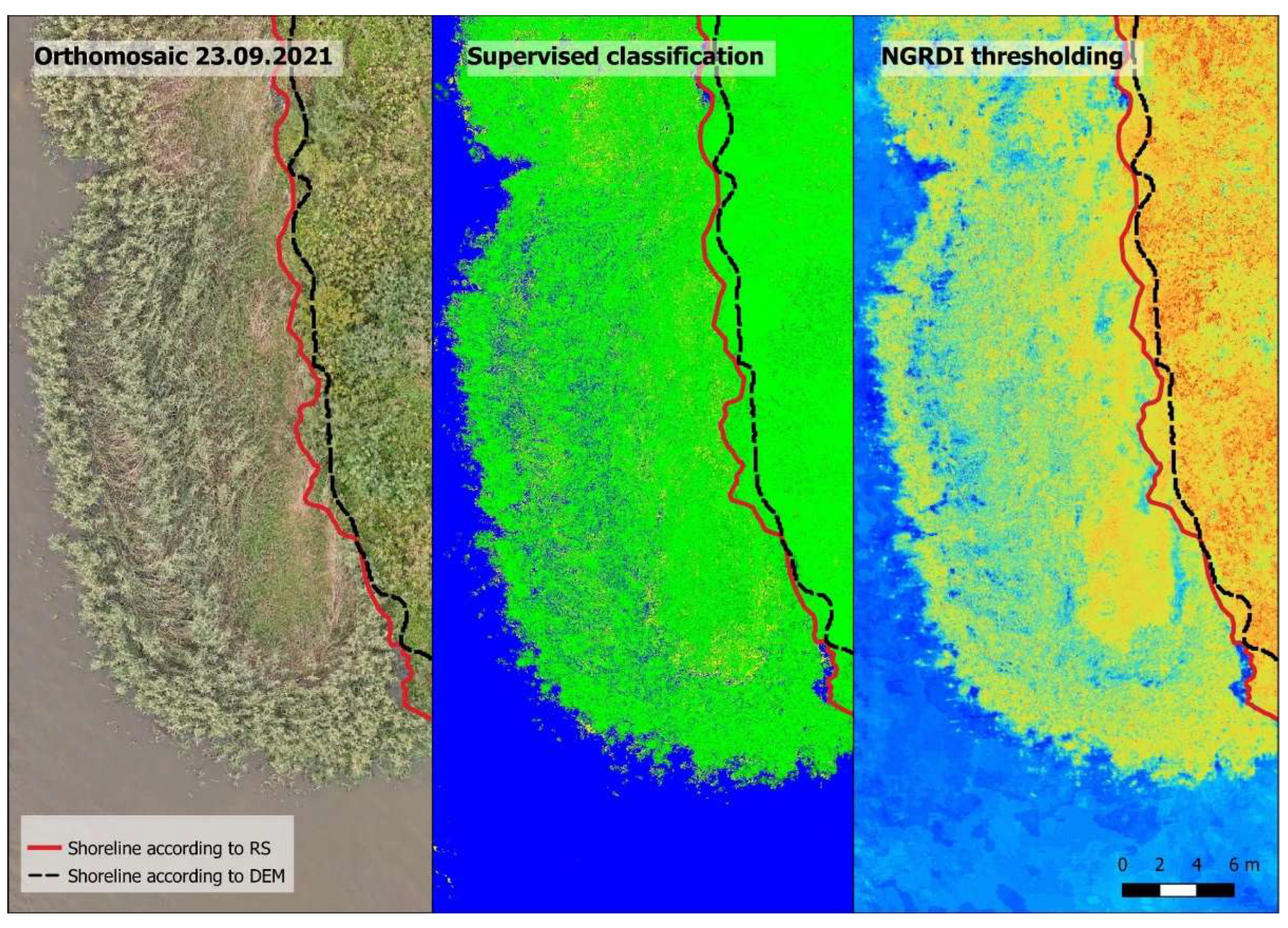
Performing supervised classification using the machine learning algorithm slightly improved the results of image segmentation. The outcome was compared with the thresholding of NGRDI in the two areas with different shore conditions (
Figure 4).
In the case of the shallow nearshore with sandy banks (a), the transitional area that is constantly affected by the waves (wet sand) was noisy, with some pixels being classified as water and others being classified as sand. The area with wet sand is marked between the two red lines. NGRDI thresholding is more useful in this scenario because the water, and wet and dry sand have some separation from each other, according to the NGRDI values. In the case of steep banks, where the shoreline can be defined as the separation between water and land vegetation (b), the supervised classification worked very well and the shoreline was defined very accurately. The resulting image of NGRDI thresholding has more noise, which would make automatic shoreline detection difficult without filtering. Overall, manually defining different classes for the machine learning algorithm improved the results and classified images had less noise. The separation of water from the sand was more pronounced and the algorithm was able recognize more surfaces. The resulting images were more detailed, but it struggled in the same conditions as unsupervised classification, i.e., shallow sandy areas where improvement was just slight, and trying to define those areas with more input for machine learning algorithm resulted in more noise in the rest of the image (pixels that were assigned to wrong classes), which produced the opposite effect. Classification of the images with NGRDI values did not produce better results than thresholding. Thus, supervised classification is not always the best solution, and sometimes, depending on the conditions of the nearshore of the reservoir, NGRDI thresholding is a better approach. Studying NGRDI values of different surfaces can result in accurate image segmentation into different classes, and in the case of the shallow sandy areas it was the most accurate option.
3.2. Shoreline Detection in the Fish Spawning Sites
It is possible to detect shorelines in areas with medium-density aquatic macrophytes (bulrushes in this case). NGRDI thresholding was able to indicate water in such conditions with relative ease (
Figure 5).
Remote sensing techniques have great advantages over the traditional methods in these areas because the vegetation does not obstruct the water, and shorelines can be detected easily. Traditional bathymetric surveys in such areas are difficult. Echo-sounding is not possible due to vegetation, and measuring points with an RTK-GPS receiver is physically demanding. Areas in which traditional methods have a clear advantage are those with dense aquatic vegetation (
Figure 6).
When the density of aquatic vegetation is high (in this case, areas with dense and high reeds), it is very difficult to detect the shoreline using RS techniques. Dense aquatic macrophytes almost completely obstruct the water. There were not many pixels indexed as water and judging the location of the shoreline was very difficult. The thresholding of NGRDI allowed for better separation of the surfaces, but in these cases, the shoreline could only be approximated.
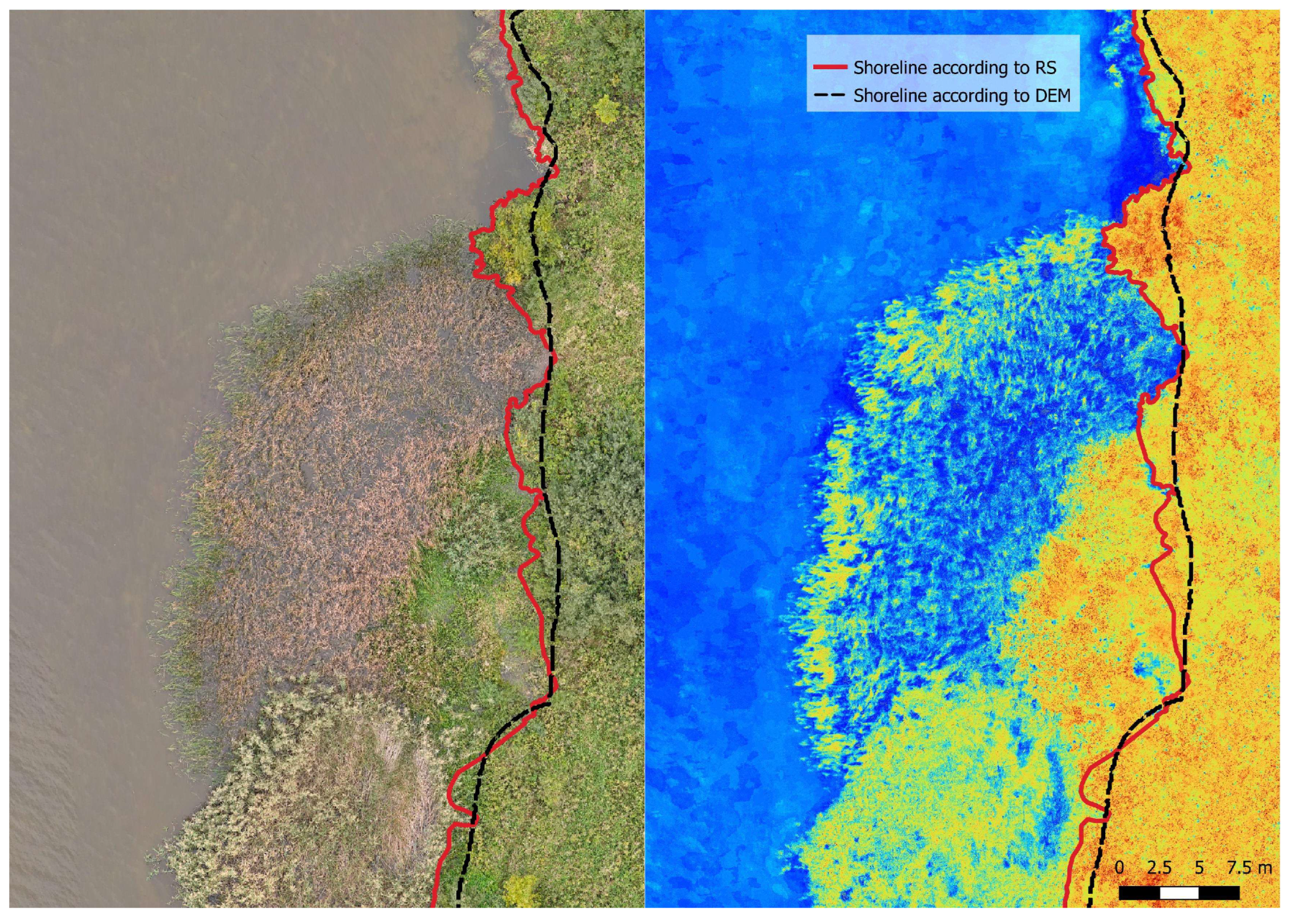
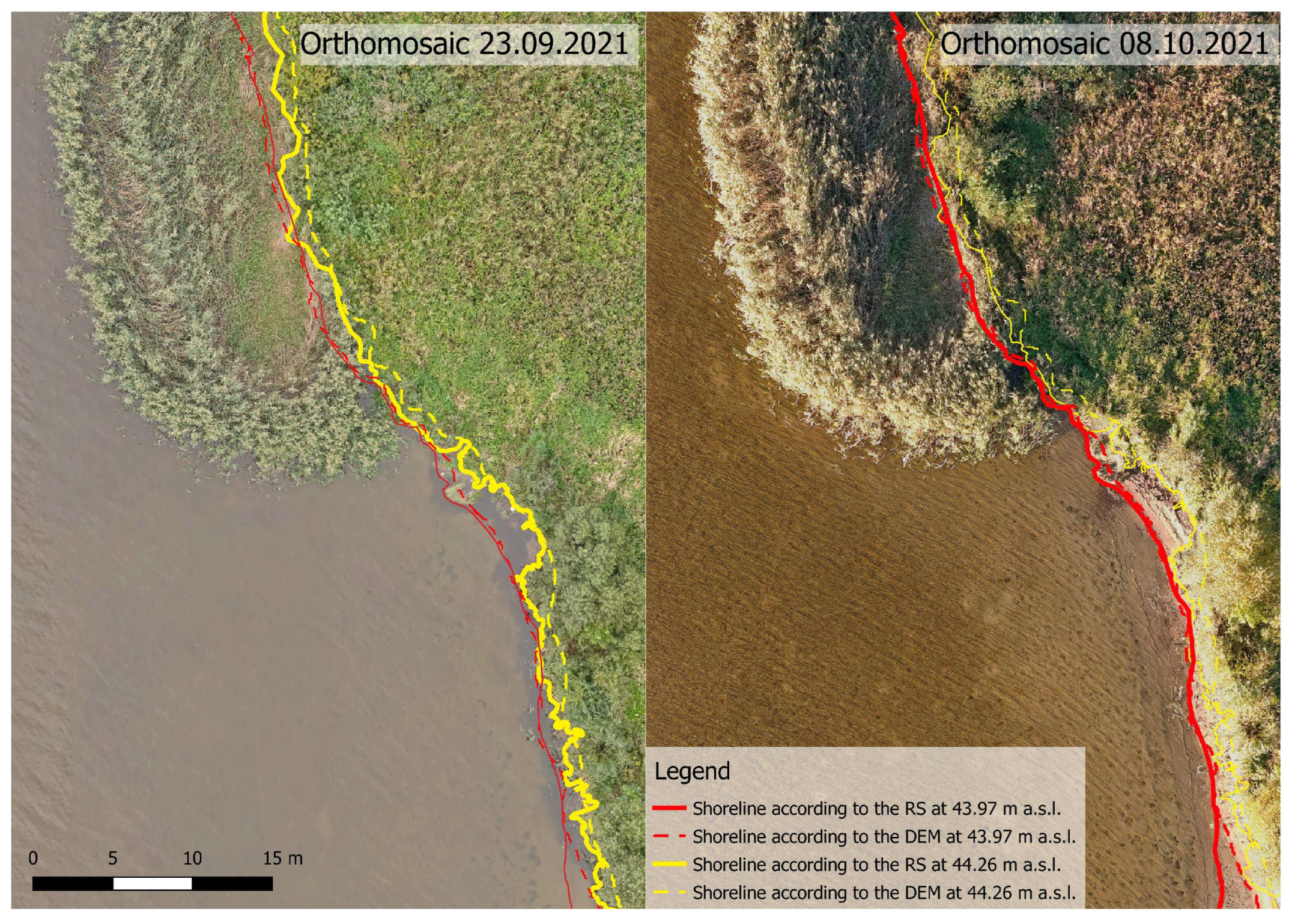
The shorelines derived from bathymetric measurements (according to the generated DEM) and RS were compared (
Figure 7).
It is noticeable that the shorelines derived from RS were more accurate in areas with an absence of or medium-density aquatic vegetation. The shorelines derived from the bathymetric measurements were not as detailed because the digital elevation model was interpolated between the measurement points. Generally, the results derived from traditional land-based surveys will never be as detailed because it is not possible to measure enough points to match the spatial resolution of the data collected by RS. Although bathymetric measurements in areas with dense aquatic vegetation are difficult, but it was possible to obtain accurate bathymetric data of the reservoir, which is where it has an advantage over remote sensing. The shorelines determined using the morphological method might not have been as detailed, but they were accurate enough to calculate dewatering areas in the fish spawning grounds at any given water level throughout the entire operating range of the HPPs, where the shoreline detection in such areas using RS is possible but complicated and might be not as accurate depending on the conditions.
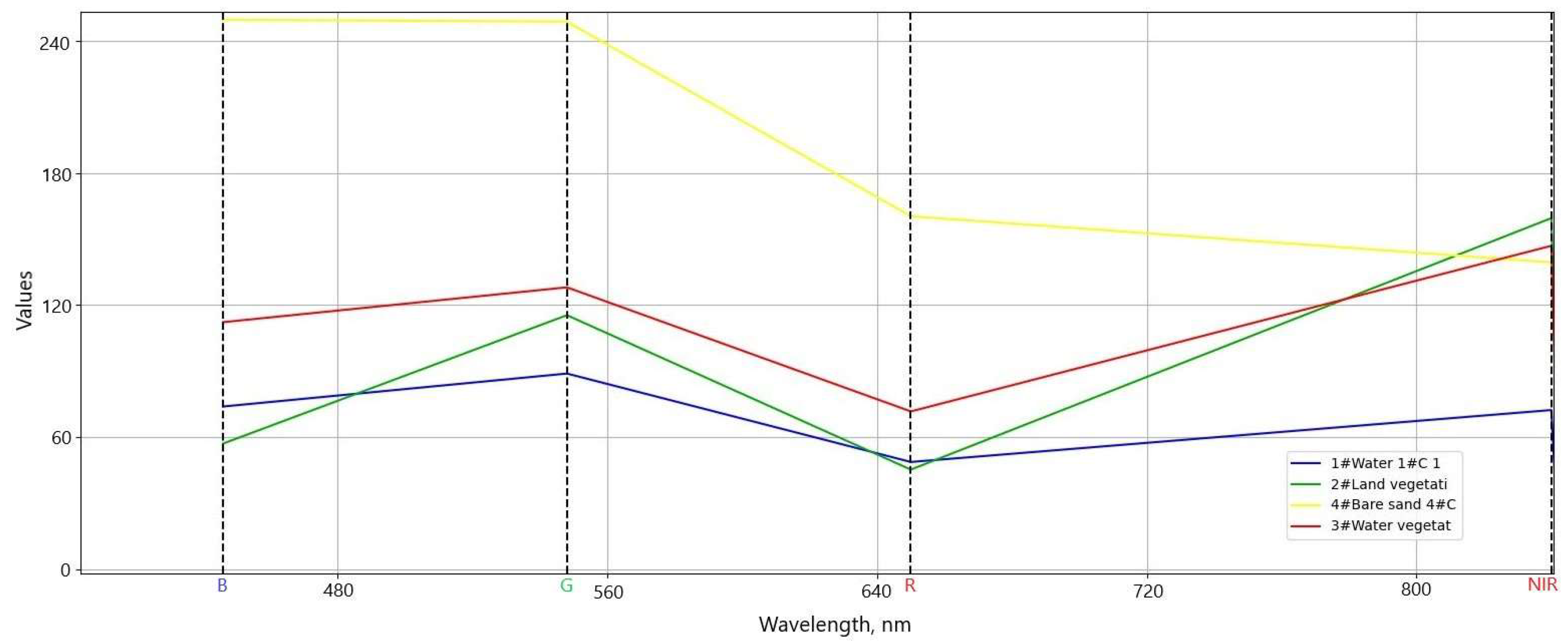
3.3. Spectral Analysis of Aquatic Macrophytes
A spectral signature analysis was carried out for the orthomosaic image captured with the multispectral camera (
Figure 8).
Judging from the graph, sand produced the highest reflection of blue, green, and red. This is expected because it is a light color, i.e., it reflects the light the best and the values in the range of NIR are lower, because NIR is absorbed by the sand. Water reflects light in the blue and green spectrums the most. In the summertime, water in the Kaunas HPP reservoir has a light green tint and the NIR spectrum reflectance is lowest out of all of the analyzed areas, because water absorbs the NIR the most. The reflectance in the near-infrared region of the electromagnetic spectrum suggests that the water may have contained a small amount of algae. The most important part of this analysis was the comparison of land and water vegetation. It is visible in the diagram that overall water vegetation had a higher reflectance in the RGB range, with the largest difference being noticeable in the blue spectrum. Some yellow reeds made up the water macrophytes; for this reason, red and blue reflectance was higher as compared to the land vegetation. The NIR reflectance was quite similar for land and water vegetation, with the land vegetation reflecting the NIR a little more, because it was denser in general. A statistical analysis of the spectral reflectance of land and water vegetation was performed for further investigation (
Table 3).
The standard deviation of the reflection values in the visible region of the electromagnetic spectrum of the water vegetation class was higher because it comprised different types of aquatic macrophytes with different signatures. Analyzing the spectral signatures of the subclasses that were defined for land and water vegetation, the Bray–Curtis similarity index ranged from 71 to 89%.
4. Discussion
According to our previous study on dewatering areas during drawdown operations and water level fluctuations in the reservoir [
1], we demonstrated that large multipurpose reservoirs in lowland countries are susceptible to various ecological problems owing to their morphology, which was discussed in the introduction. Accurate data of the most vulnerable littoral areas are crucial for the optimal and environmentally sound operation of the reservoir. Generally, shallow foreshore areas are very difficult to survey because they are too shallow for echo-sounding and are usually measured using traditional bathymetric surveying methods. Traditional types of surveying in reservoirs are difficult and labor intensive because foreshores are often hard to access due to aquatic vegetation and accumulated silt on the bottom. Remote sensing techniques showed to be a valuable addition to traditional methods. It is possible to obtain bathymetric data of shallow water bodies from multispectral or RGB imaging. These methods rely on the Beer–Lambert law, which describes the absorption effect as light passes through transparent media (water) [
44]. This is the physical principle underlying the measurement of water depth from brightness levels in captured imagery. There are plentiful studies on the matter [
45,
46]. For example, after comprehensive calibration, the authors introduced an automated bathymetric mapping method capable of a 4 m
2 spatial resolution with a precision of ±15 cm for remotely sensed datasets [
47]. In the preliminary assessment of airborne hyperspectral coastal bathymetry capabilities based on International Hydrographic Organization (IHO) standards, the authors state that the hyperspectral bathymetry estimations were close to being consistent with an IHO order 2 standard up to a 14 m depth in the first test location and up to a 5 m depth in the second location [
48]. The datasets were collected over Mayotte and the Geyser Bank, north of Madagascar, Indian Ocean. However, there is a weakness inherent in photogrammetric methods due to uneven light. It has been shown that the red color band has a greater sensitivity to depth than blue or green [
46] but it does not penetrate the water column as deeply. These studies use depth and water color relationships that are site-specific and require ground surveys to calibrate this process [
49], and the accuracy suffers when there are changes in the substrate material, overhanging vegetation, surface disturbance from waves and shadows, etc. [
47].
An article by [
50] presents a generic processing chain that covers all modules required for operational flood monitoring from multispectral satellite data. Segmentation of the water extent is performed by a convolutional neural network that has been trained on a global dataset of Landsat TM, ETM+, OLI, and Sentinel-2 images. In the article, various water segmentation techniques were discussed and the authors utilized an interesting approach that could be used for different forms of satellite data. This approach is appropriate for monitoring large floods, when the changes in the water surface area are large; however, for our study, the resolution of the satellite images was not sufficient to track relatively small changes. More detailed and accurate data are needed, and each dataset was analyzed individually to obtain the most accurate results possible.
Another approach involves the use of airborne Light Detection and Ranging (LiDAR) technology to conduct bathymetric surveys of shallow water regions. There are various bathymetric LiDAR systems. The majority make use of a green laser for the bathymetric survey. However, the availability of these devices is still relatively low, mostly due to their high prices. LiDAR is only feasible for relatively shallow and clear waters. During the study of two lakes in Poland, it was concluded that a LiDAR sensor can be used for measurements in the littoral zone (up to 1.6 m), and in deeper areas the accuracy significantly decreased [
51]. In another study, an assessment of the ability to map river bathymetry using airborne LiDAR was carried out [
52]. Data were collected over 220 river kilometers in the Yakima and Trinity River Basins in the USA. The mean error of water depths varied from 0.04 to 0.52 m. A multistep morphological technique that works by utilizing the digital elevation models (DEMs) obtained from LiDAR with respect to a tidal datum was discussed by [
53]. It remains unclear whether LiDAR surveying is accurate in areas containing water macrophytes such as reeds and bulrush. For our purposes, it would be feasible to use a regular topographic LiDAR system when the water level in the reservoir is at its lowest point.
We took the shoreline detection approach for this study using photogrammetry. The drawback of this method is that it requires multiple surveys, but it was possible to determine the shoreline in areas containing aquatic macrophytes where other methods would fail. It is much easier to conduct RS surveys in difficult areas, and surveying is much quicker compared to traditional surveys. Furthermore, traditional surveys cannot match the resolution of the data collected by remote sensing (depending on the RS data source). There are many different techniques for shoreline detection, as was explored in the Methodology section.
Different water segmentation methods were implemented, including machine learning, to establish the optimum methods for shoreline detection in shallow nearshore areas with different conditions. A very interesting comparison and assessment of different object-based classifications using machine learning algorithms were presented in the article [
54]. The study was implemented for bergamot and an onion crop located in Calabria (Italy). Four classification algorithms were assessed: K-Nearest Neighbor, Support Vector Machines, Random Forests, and Normal Bayes. The Remote Sensing and Geographical Information Systems software Library was used in the image segmentation step. A similar approach can be utilized for aquatic vegetation classification and segmentation, which could be the basis for further research.
Our study demonstrated that image classification and thresholding of various indices can be used to highlight pixels that represent water in areas containing aquatic macrophytes. It works well in areas with medium-density vegetation, but using these techniques in the areas covered with dense aquatic vegetation often does not clearly separate the shoreline. Shorelines can be approximated by judging the density of water pixels in the aquatic vegetation, but it is difficult and not as accurate as in areas that are clear from vegetation.
There is no universal method to detect shorelines using RS, i.e., in different conditions, different methods are better-suited. NGRDI thresholding showed the best results in areas with shallow and sandy shorelines, and supervised classification was typically the best method for separating water from vegetation. Unsupervised classification of NDWI was also accurate and performs relatively quickly if multispectral images are available. These findings make surveying more accessible with simpler equipment. Moreover, when assessing shorelines with washed-up silt, a visual analysis of orthomosaics was the most reliable method because the other techniques failed to separate these areas without introducing excessive noise to the segmented images. In difficult conditions with dense aquatic macrophytes, shoreline detection was very complicated. It was necessary to double check the results of all water surface identification techniques, because each of them had some percentage of incorrectly identified pixels (noise) and it was relatively easy to incorrectly identify the shoreline. In such conditions, traditional manual bathymetric surveying is the most reliable method, but it is very challenging.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}