
Leak Localization on Cylinder Tank Bottom Using Acoustic Emission


Abstract
:1. Introduction
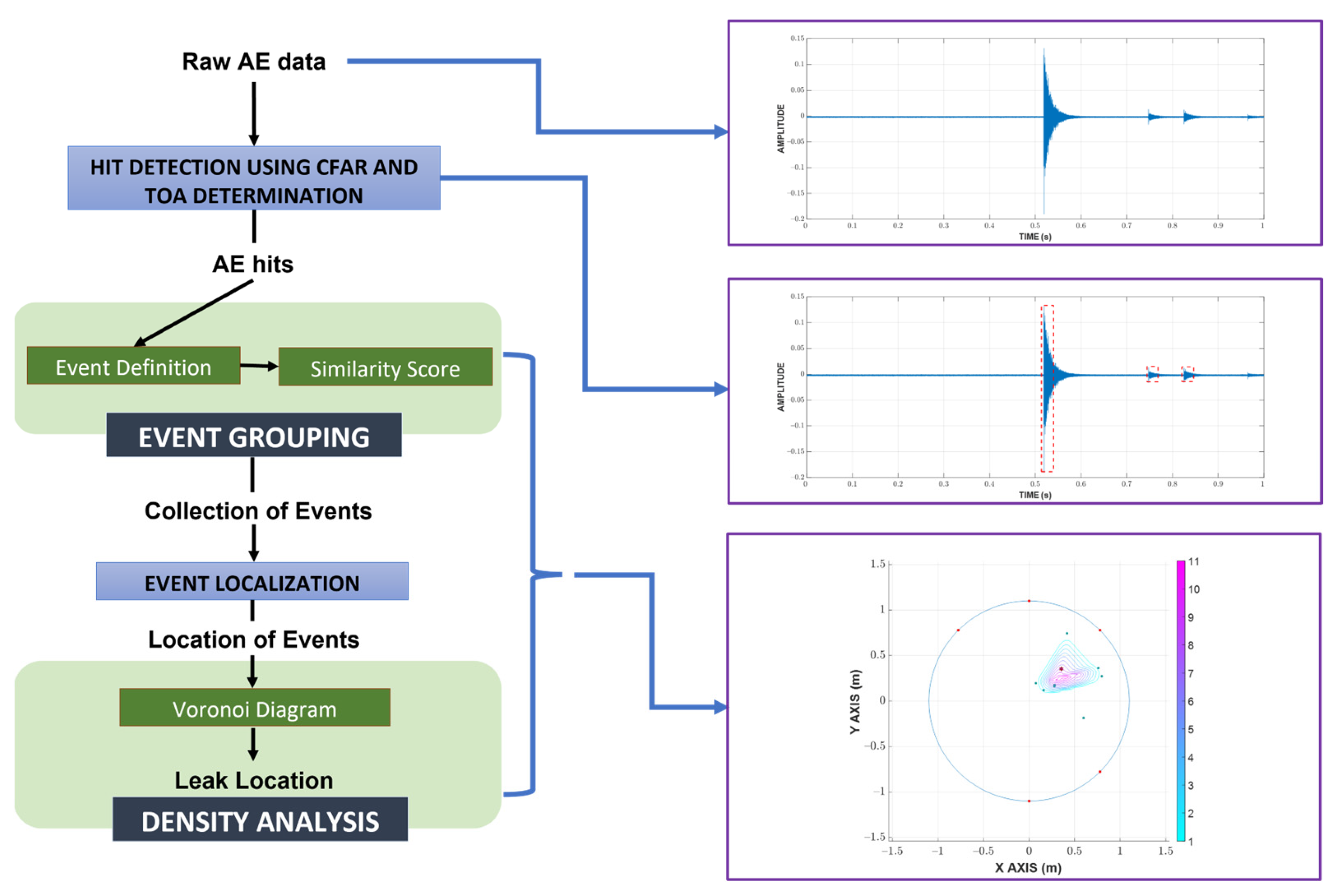
- A leak localization scheme using AE data, which has not been under investigation to the best of the authors’ knowledge, is proposed with a novel event grouping approach, which gathers hits originating from the same event through similarity measurement.
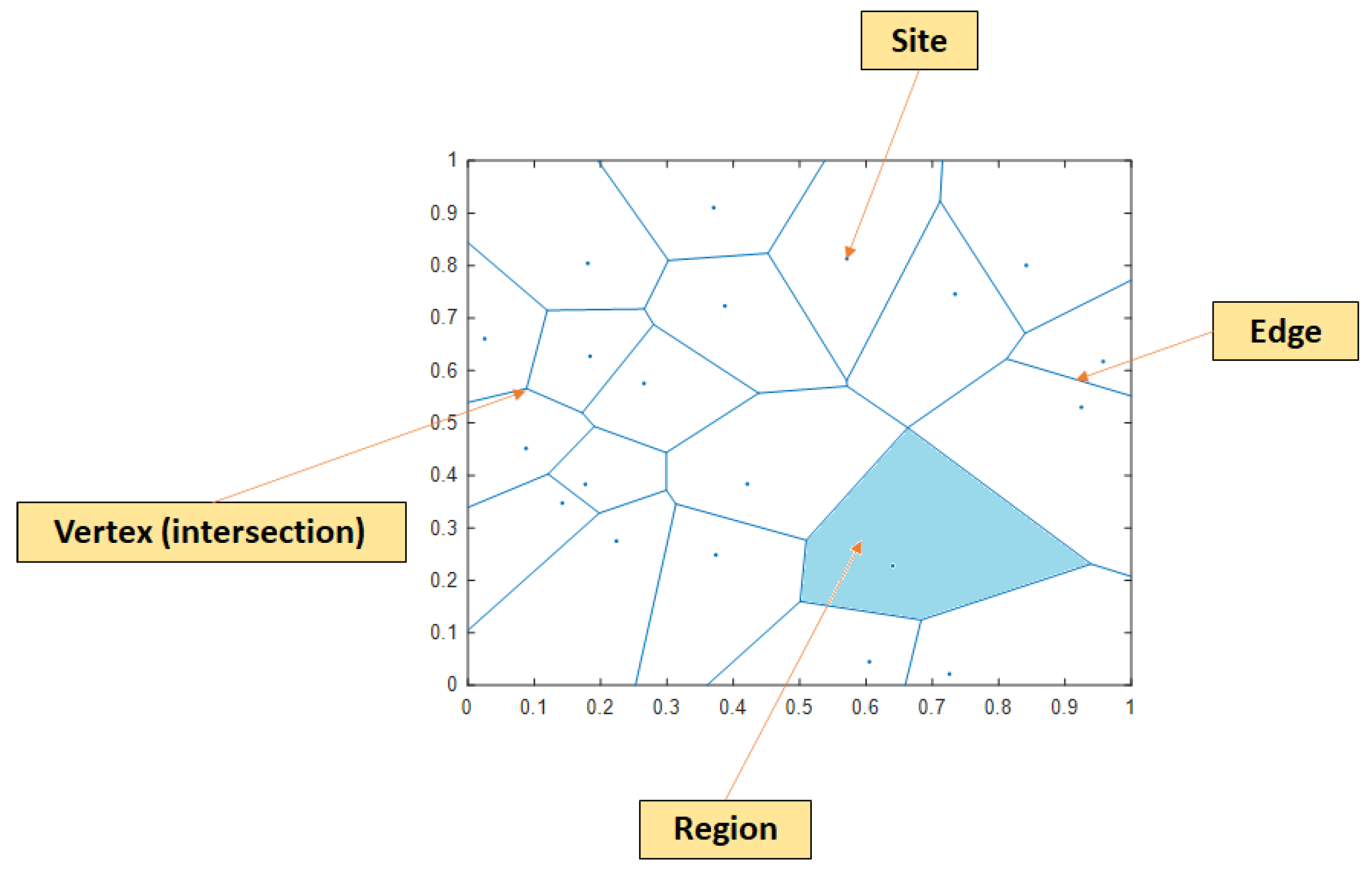
- The locations of events are further analyzed using a Voronoi diagram to find the area in which the leak is most likely happening.
- The study is validated through a case study of a one-failed-sensor scenario.
2. Methodology
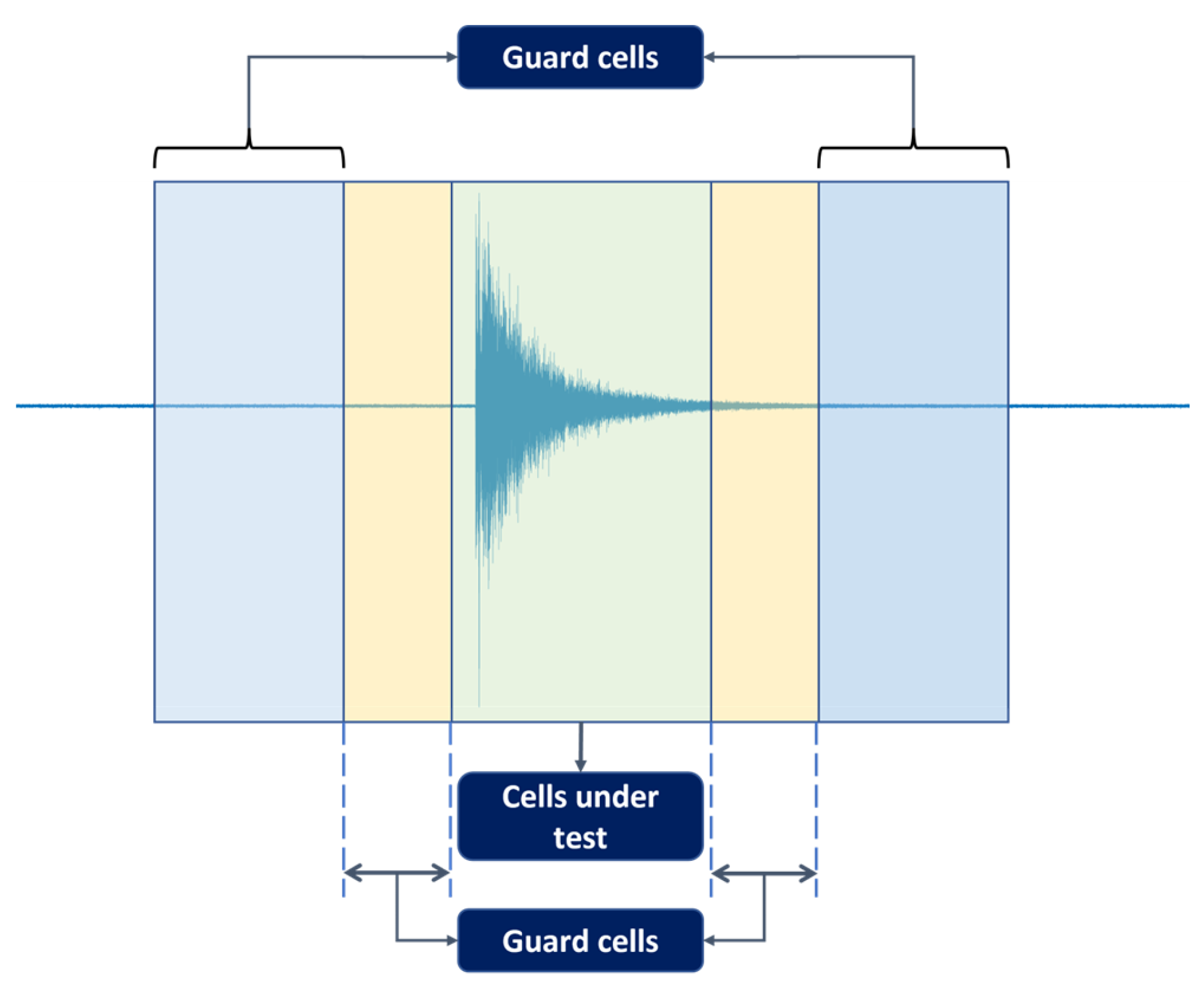
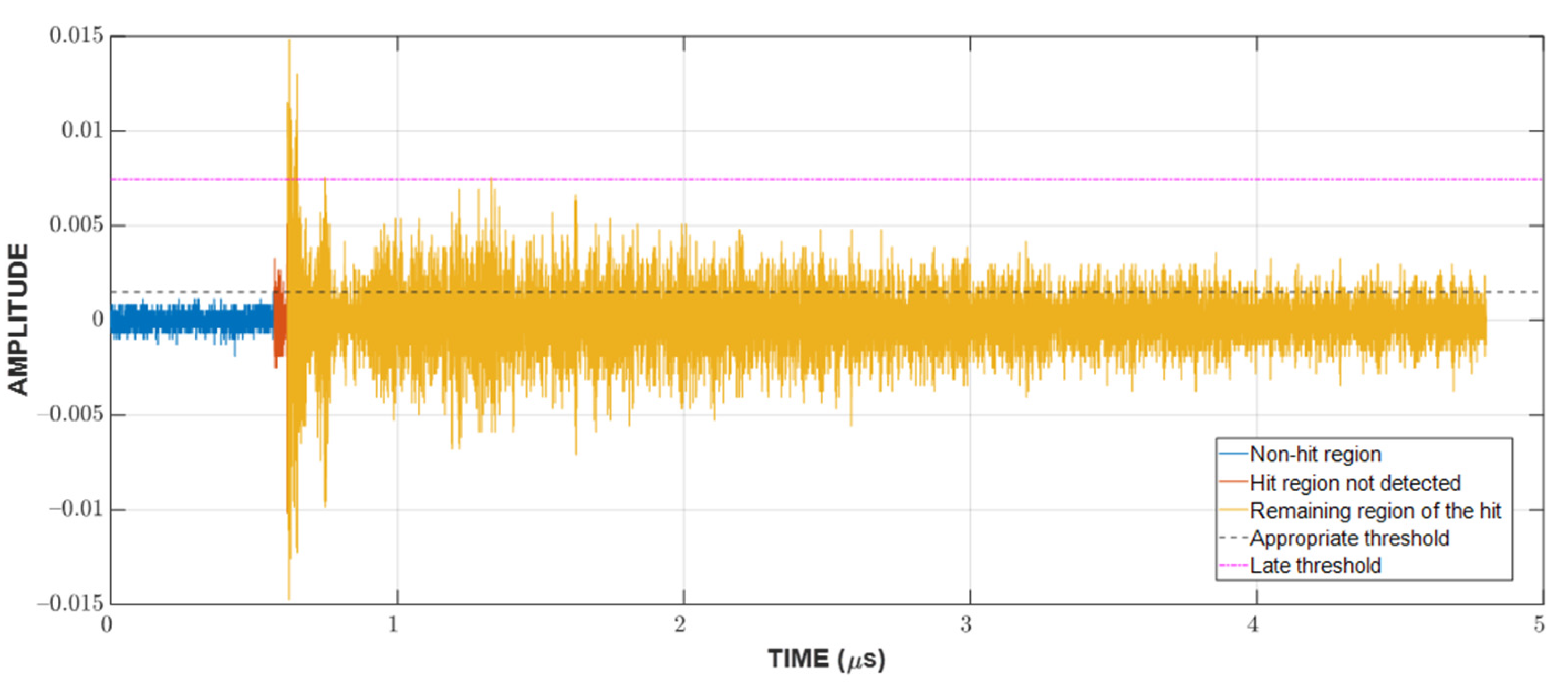
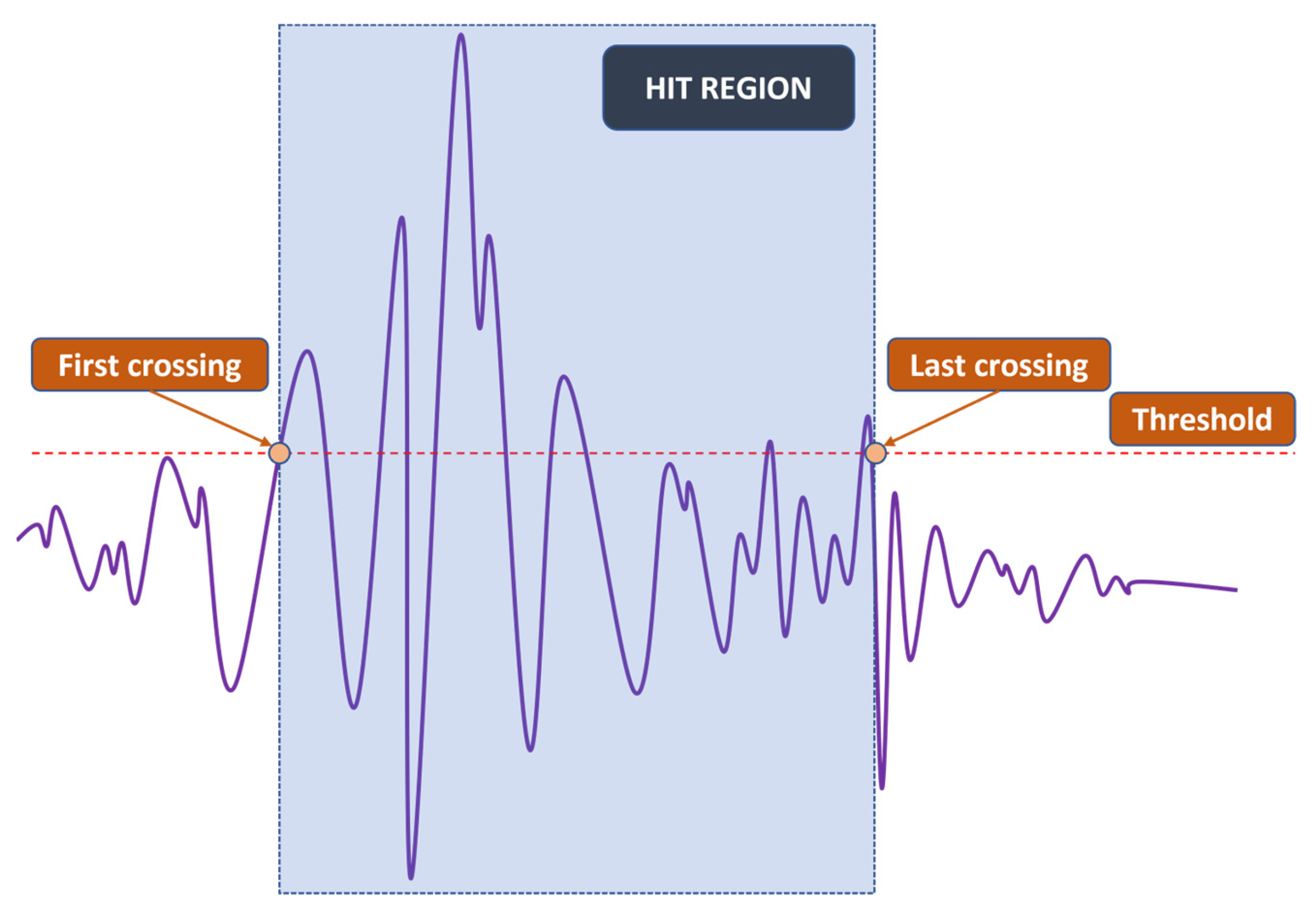
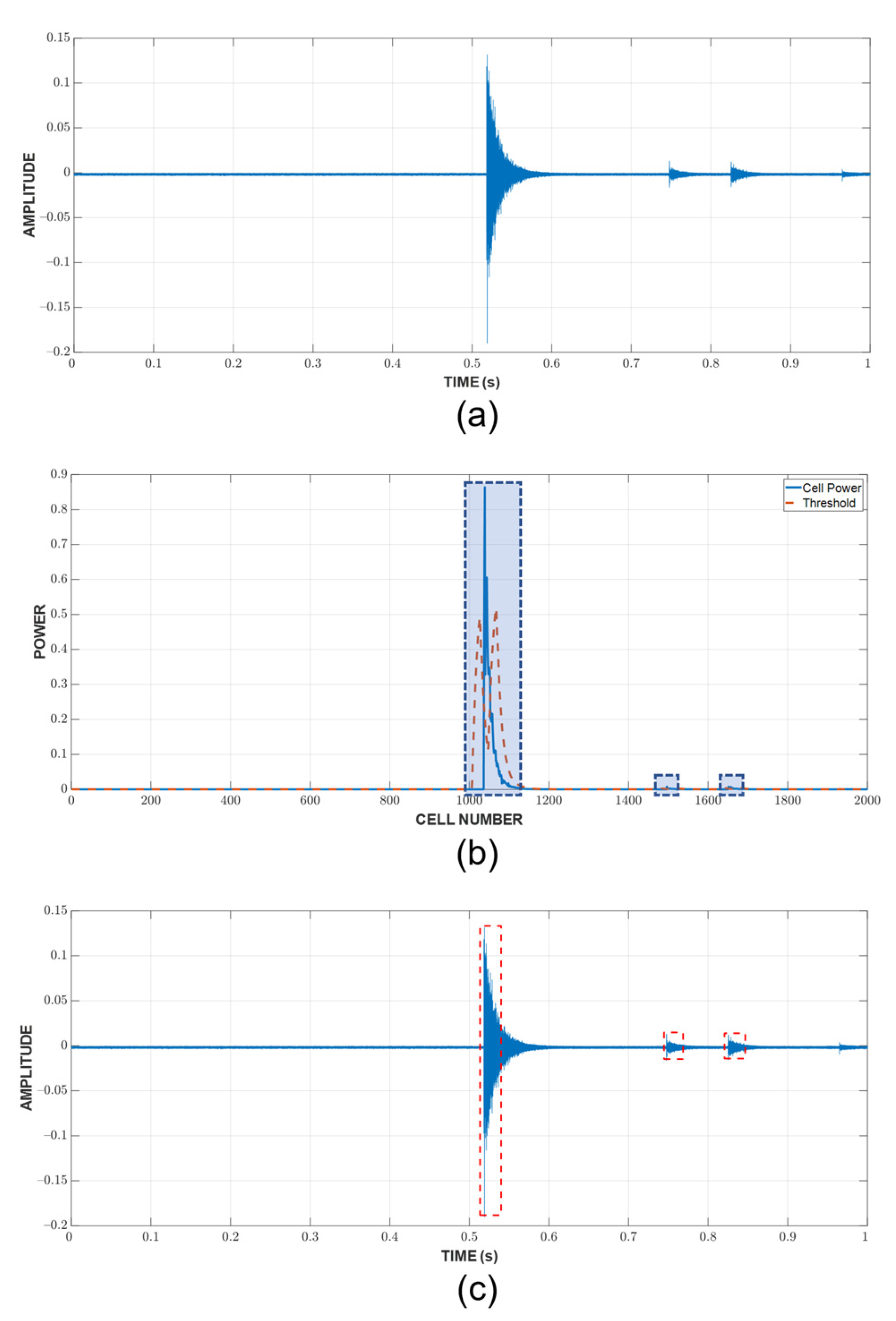
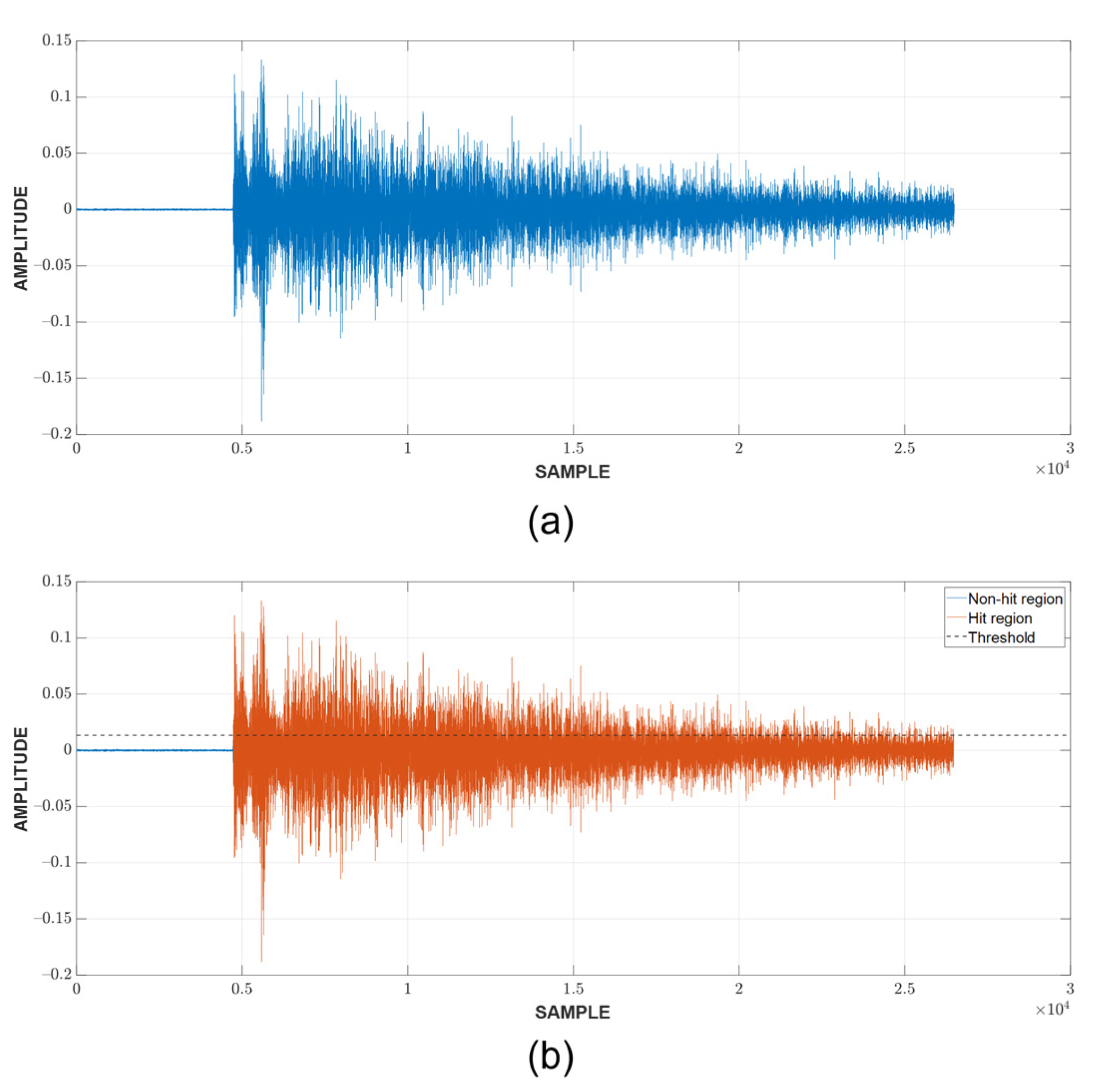
2.1. AE Hit Detection
2.2. Similarity Score and Event Grouping
2.3. Event Localization Using Time Difference of Arrival
2.4. Voronoi Diagram for Data Density Analysis
3. Case Study
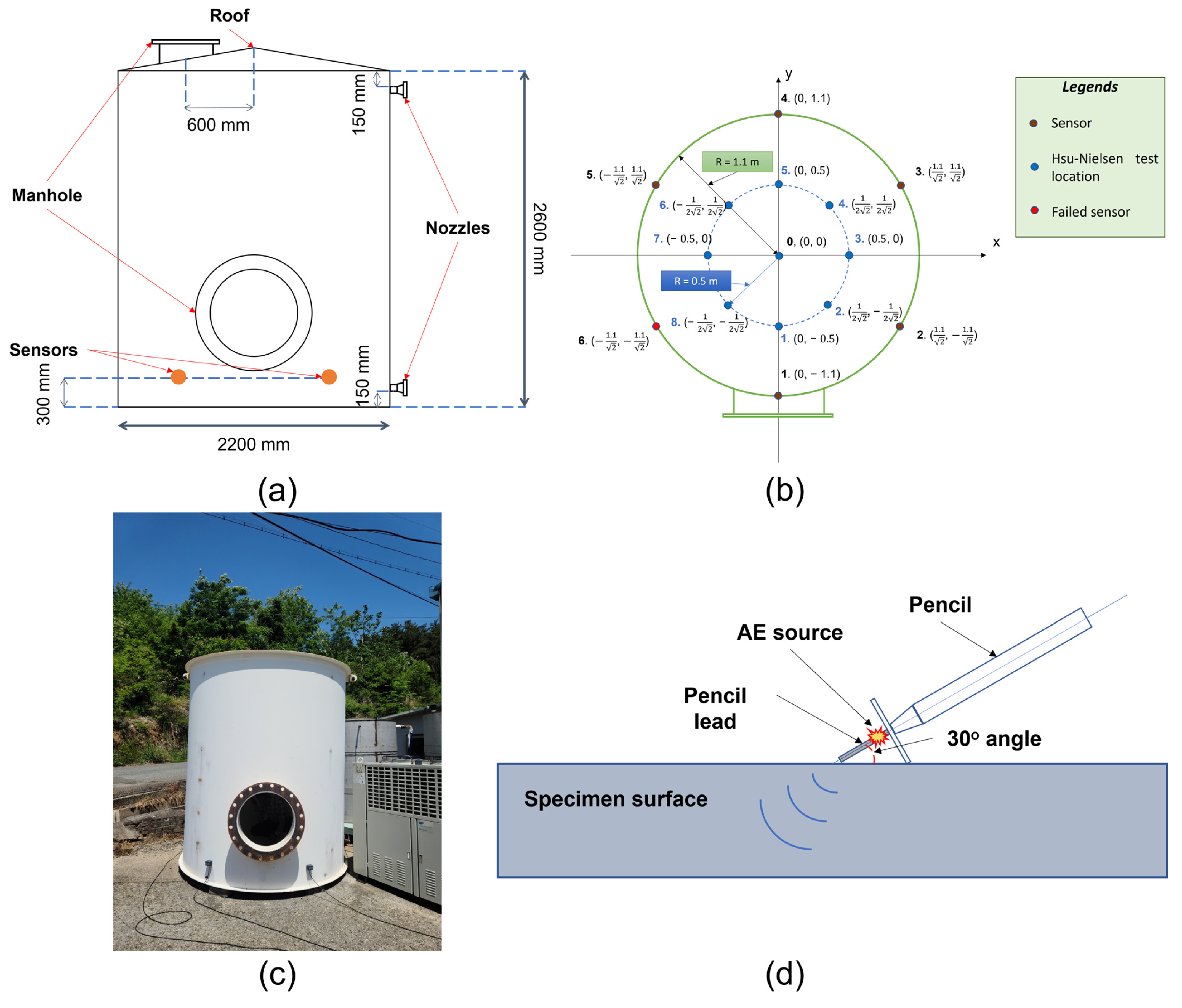
3.1. Experimental Setup
3.2. Result and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Miller, R.K.; Hill, E.v.K.; Moore, P.O. American Society for Nondestructive Testing. In Acoustic Emission Testing; American Society for Nondestructive Testing: Columbus, OH, USA, 2005. [Google Scholar]
- Grosse, C.U.; Ohtsu, M. Acoustic Emission Testing: Basics for Research-Applications in Civil Engineering; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Olszewska, A. Using the acoustic emission method for testing aboveground vertical storage tank bottoms. Appl. Acoust. 2022, 188, 108564. [Google Scholar] [CrossRef]
- Lackner, G.; Ts, P.; Nig, C. Acoustic emission testing on flat-bottomed storage tanks: How to condense acquired data to a reliable statement regarding floor condition. J. Acoust. Emiss. 2002, 20, 179–187. [Google Scholar]
- Ohtsu, M.; Isoda, T.; Tomoda, Y. Acoustic emission techniques standardized for concrete structures. J. Acoust. Emiss. 2007, 25, 21–32. [Google Scholar]
- Nguyen, T.-K.; Ahmad, Z.; Kim, J.M. A Scheme with Acoustic Emission Hit Removal for the Remaining Useful Life Prediction of Concrete Structures. Sensors 2021, 21, 7761. [Google Scholar] [CrossRef] [PubMed]
- Aye, S.A.; Heyns, P.S. An integrated Gaussian process regression for prediction of remaining useful life of slow speed bearings based on acoustic emission. Mech. Syst. Signal Process. 2017, 84, 485–498. [Google Scholar] [CrossRef]
- Meo, M. 6—Acoustic emission sensors for assessing and monitoring civil infrastructures. In Sensor Technologies for Civil Infrastructures; Wang, M.L., Lynch, J.P., Sohn, H., Eds.; Woodhead Publishing: Philadelphia, PA, USA, 2014; Volume 55, pp. 159–178. [Google Scholar] [CrossRef]
- Huang, J.Q. Non-destructive evaluation (NDE) of composites: Acoustic emission (AE). In Non-Destructive Evaluation (NDE) of Polymer Matrix Composites; Elsevier: Amsterdam, The Netherlands, 2013; pp. 12–32. [Google Scholar]
- Ahmad, S.; Ahmad, Z.; Kim, C.H.; Kim, J.M. A Method for Pipeline Leak Detection Based on Acoustic Imaging and Deep Learning. Sensors 2022, 22, 1562. [Google Scholar] [CrossRef]
- Moradian, Z.; Li, B.Q. Hit-based acoustic emission monitoring of rock fractures: Challenges and solutions. Springer Proc. Phys. 2017, 179, 357–370. [Google Scholar] [CrossRef]
- van Steen, C.; Nasser, H.; Verstrynge, E.; Wevers, M. Acoustic emission source characterisation of chloride-induced corrosion damage in reinforced concrete. Struct. Health Monit. 2022, 21, 1266–1286. [Google Scholar] [CrossRef]
- Quy, T.B.; Kim, J. Leak localization in industrial-fluid pipelines based on acoustic emission burst monitoring. Measurement 2020, 151, 107150. [Google Scholar] [CrossRef]
- Tra, V.; Kim, J.Y.; Jeong, I.; Kim, J.M. An acoustic emission technique for crack modes classification in concrete structures. Sustainability 2020, 12, 6724. [Google Scholar] [CrossRef]
- Jia, T.; Wang, H.; Shen, X.; Jiang, Z.; He, K. Target localization based on structured total least squares with hybrid TDOA-AOA measurements. Signal Process. 2018, 143, 211–221. [Google Scholar] [CrossRef]
- Shang, X.; Wang, Y.; Miao, R. Acoustic emission source location from P-wave arrival time corrected data and virtual field optimization method. Mech. Syst. Signal Process. 2022, 163, 108129. [Google Scholar] [CrossRef]
- Eaton, M.J.; Pullin, R.; Holford, K.M. Towards improved damage location using acoustic emission. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2012, 226, 2141–2153. [Google Scholar] [CrossRef]
- Ciampa, F.; Meo, M. Acoustic emission localization in complex dissipative anisotropic structures using a one-channel reciprocal time reversal method. J. Acoust. Soc. Am. 2011, 130, 168–175. [Google Scholar] [CrossRef] [Green Version]
- Mirgal, P.; Pal, J.; Banerjee, S. Online acoustic emission source localization in concrete structures using iterative and evolutionary algorithms. Ultrasonics 2020, 108, 106211. [Google Scholar] [CrossRef]
- Liu, Z.H.; Peng, Q.L.; Li, X.; He, C.F.; Wu, B. Acoustic Emission Source Localization with Generalized Regression Neural Network Based on Time Difference Mapping Method. Exp. Mech. 2020, 60, 679–694. [Google Scholar] [CrossRef]
- Li, Y.; Yu, S.S.; Dai, L.; Luo, T.F.; Li, M. Acoustic emission signal source localization on plywood surface with cross-correlation method. J. Wood Sci. 2018, 64, 78–84. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Liu, Y.; Kong, F.; He, N. Acoustic source localization based on generalized cross-correlation time-delay estimation. Procedia Eng. 2011, 15, 4912–4919. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Pahlavan, L.; Yang, Y. Evaluation of acoustic emission source localization accuracy in concrete structures. Struct. Health Monit. 2020, 19, 2063–2074. [Google Scholar] [CrossRef]
- Ebrahimkhanlou, A.; Salamone, S. Single-sensor acoustic emission source localization in plate-like structures using deep learning. Aerospace 2018, 5, 50. [Google Scholar] [CrossRef]
- Ebrahimkhanlou, A.; Salamone, S. Acoustic emission source localization in thin metallic plates: A single-sensor approach based on multimodal edge reflections. Ultrasonics 2017, 78, 134–145. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures, 4th ed.; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Du, Q.; Faber, V.; Gunzburger, M. Centroidal Voronoi tessellations: Applications and algorithms. SIAM Rev. 1999, 41, 637–676. [Google Scholar] [CrossRef] [Green Version]
- Rohling, H. Radar CFAR Thresholding in Clutter and Multiple Target Situations. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 608–621. [Google Scholar] [CrossRef]
- Bai, F.; Gagar, D.; Foote, P.; Zhao, Y. Comparison of alternatives to amplitude thresholding for onset detection of acoustic emission signals. Mech. Syst. Signal Process. 2017, 84, 717–730. [Google Scholar] [CrossRef] [Green Version]
- Ohtsu, M.; Shiotani, T.; Shigeishi, M.; Kamada, T.; Yuyama, S.; Watanabe, T.; Suzuki, T.; van Mier, J.G.M.; Vogel, T.; Grosse, C.; et al. Recommendation of RILEM TC 212-ACD: Acoustic emission and related NDE techniques for crack detection and damage evaluation in concrete: Test method for classification of active cracks in concrete structures by acoustic emission. Mater. Struct. Mater. Constr. 2010, 43, 1187–1189. [Google Scholar] [CrossRef]
- Hsu, N.N.; Breckenridge, F.R. Characterization and calibration of acoustic emission sensors. Mater. Eval. 1981, 39, 60–68. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters/Parts | Details |
|---|---|
| Dimension (without roof) | 2.2 × 2.6 m (diameter × height) |
| Tank capacity | 9.85 m3 |
| Tank empty weight | 2.1 tons |
| Tank operating weight | 11.95 tons |
| Shell/roof/bottom material | SA516-70N carbon steel |
| Flange material | SA105N carbon steel |
| Nozzle neck material | SA106-B carbon steel |
| Earthquake design | Yes |
| Test Location | Conventional Grid Search Localization | The Proposed Method | |
|---|---|---|---|
| Estimated Displacement to Innermost Region (m) | Estimated Displacement to the Outermost Region (m) | ||
| 1 | 0.31 | 0.24 | 0 |
| 2 | 0.18 | 0.11 | 0 |
| 3 | 0.27 | 0.17 | 0.03 |
| 4 | 0.21 | 0.15 | 0 |
| 5 | 0.26 | 0.22 | 0 |
| 6 | 0.13 | 0.09 | 0 |
| 7 | 0.19 | 0.19 | 0.12 |
| 8 | 0.22 | 0.14 | 0.07 |
| Center | 0 | 0.12 | 0 |
| Mean ≈ 0.20/Std ≈ 0.09 | Mean ≈ 0.16/Std ≈ 0.05 | Mean ≈ 0.02/Std ≈ 0.04 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-K.; Ahmad, Z.; Kim, J.-M. Leak Localization on Cylinder Tank Bottom Using Acoustic Emission. Sensors 2023, 23, 27. https://doi.org/10.3390/s23010027
Nguyen T-K, Ahmad Z, Kim J-M. Leak Localization on Cylinder Tank Bottom Using Acoustic Emission. Sensors. 2023; 23(1):27. https://doi.org/10.3390/s23010027
Chicago/Turabian StyleNguyen, Tuan-Khai, Zahoor Ahmad, and Jong-Myon Kim. 2023. "Leak Localization on Cylinder Tank Bottom Using Acoustic Emission" Sensors 23, no. 1: 27. https://doi.org/10.3390/s23010027