
Hybrid Target Selections by ”Hand Gestures + Facial Expression” for a Rehabilitation Robot
 ,
, 
Abstract
:1. Introduction
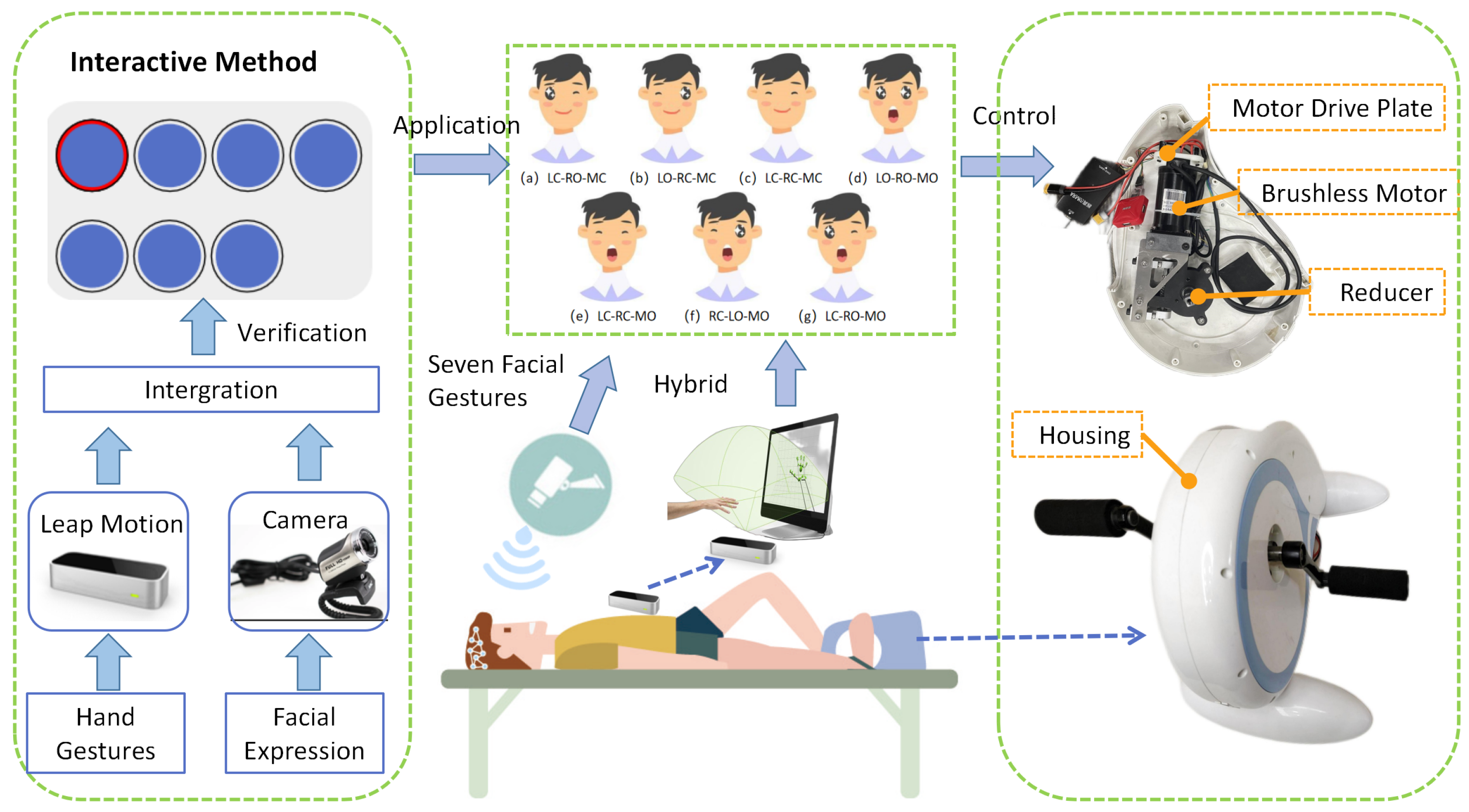
- A hybrid control gestures technique with two input modalities from hand gestures and facial expression is described;
- It is a touchless interactive technique;
- It can be mapped to the interactive mode of the virtual reality environment;
- Facial expressions correspond to basic control functions;
- Hand gestures are detected by Leap Motion, providing a virtual hand technique for cursor movement control.
2. Materials and Methods
2.1. Interactive Method
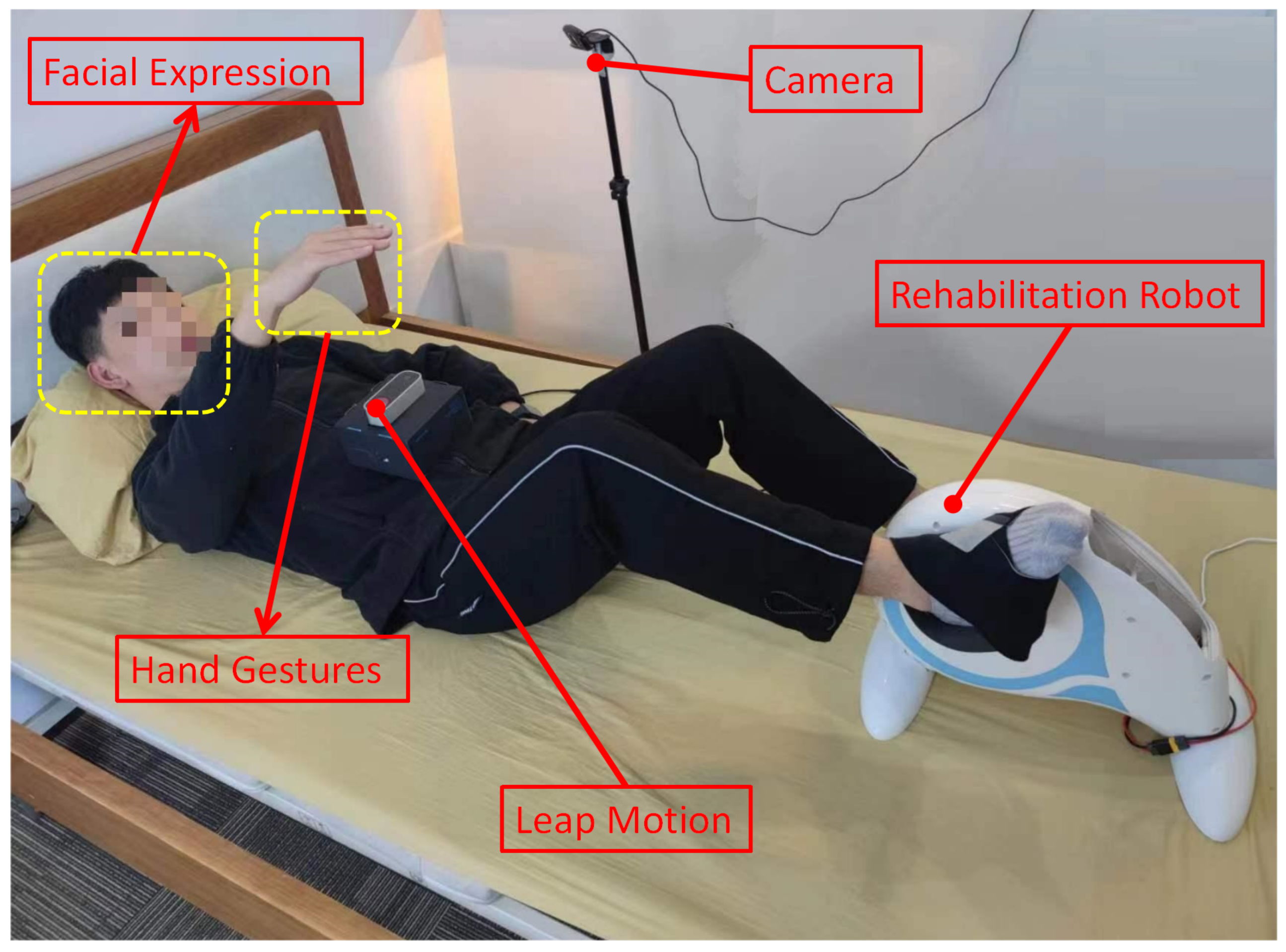
2.1.1. Interactive Hardware
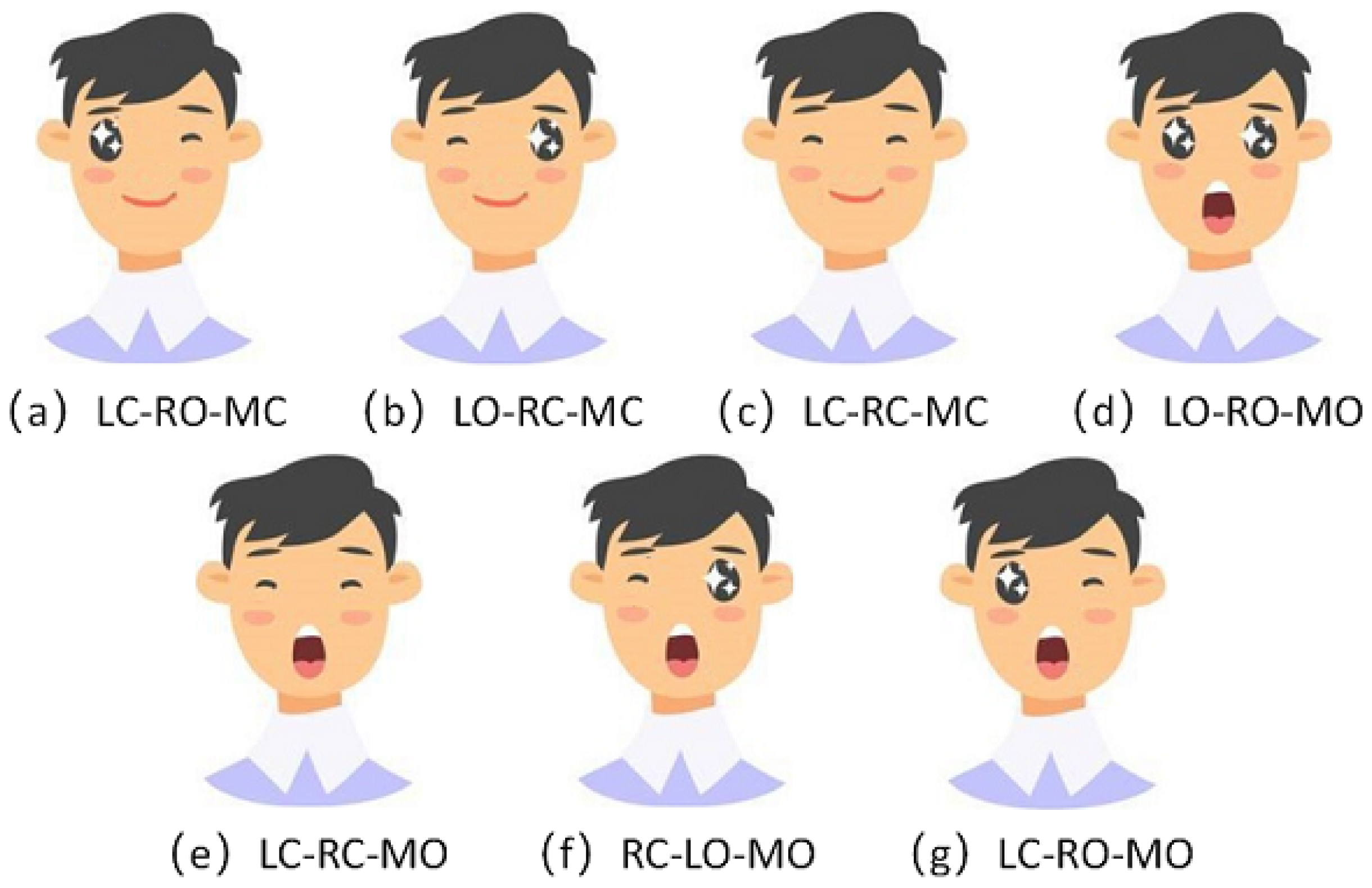
2.1.2. Seven Facial Gestures
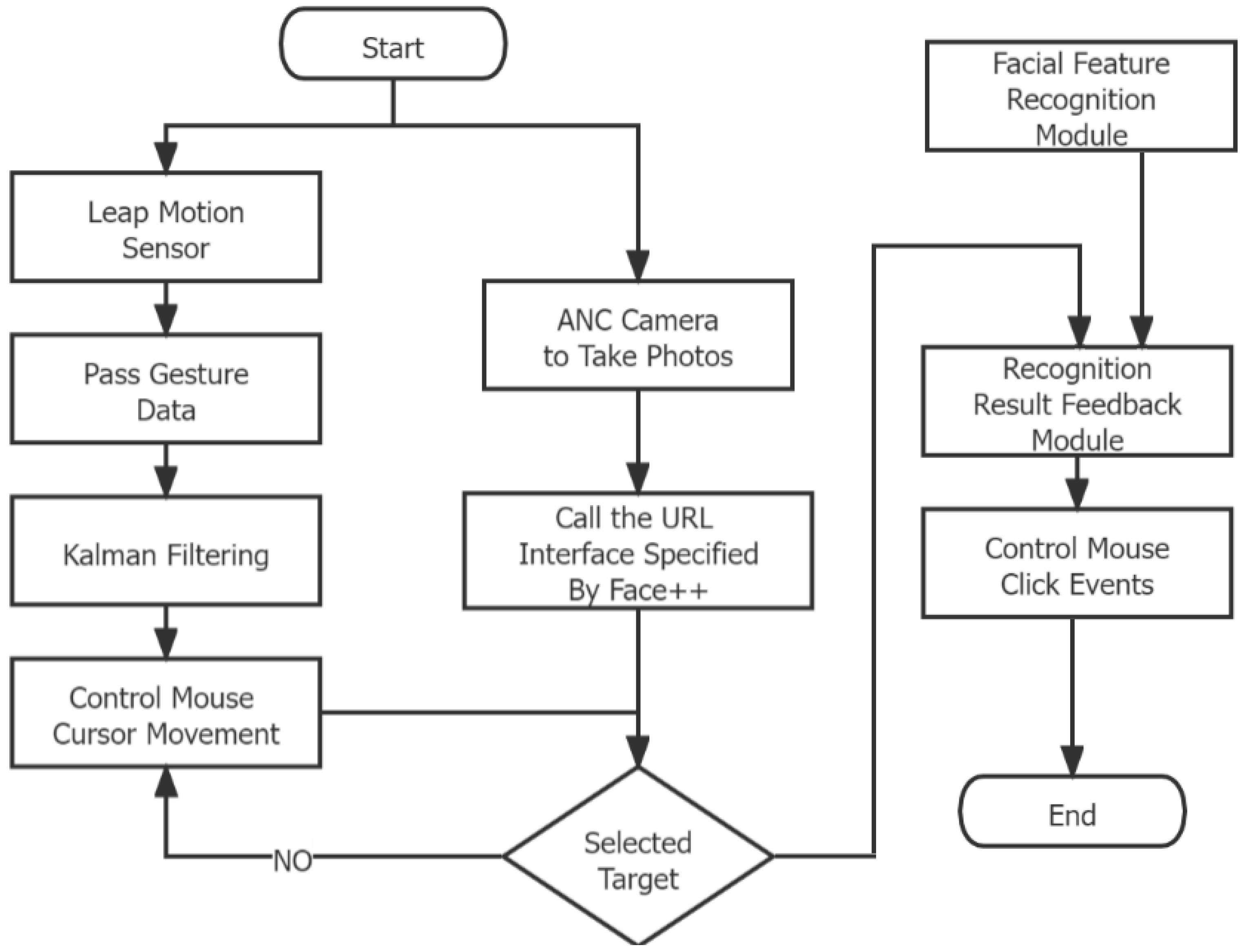
2.1.3. Software and Method
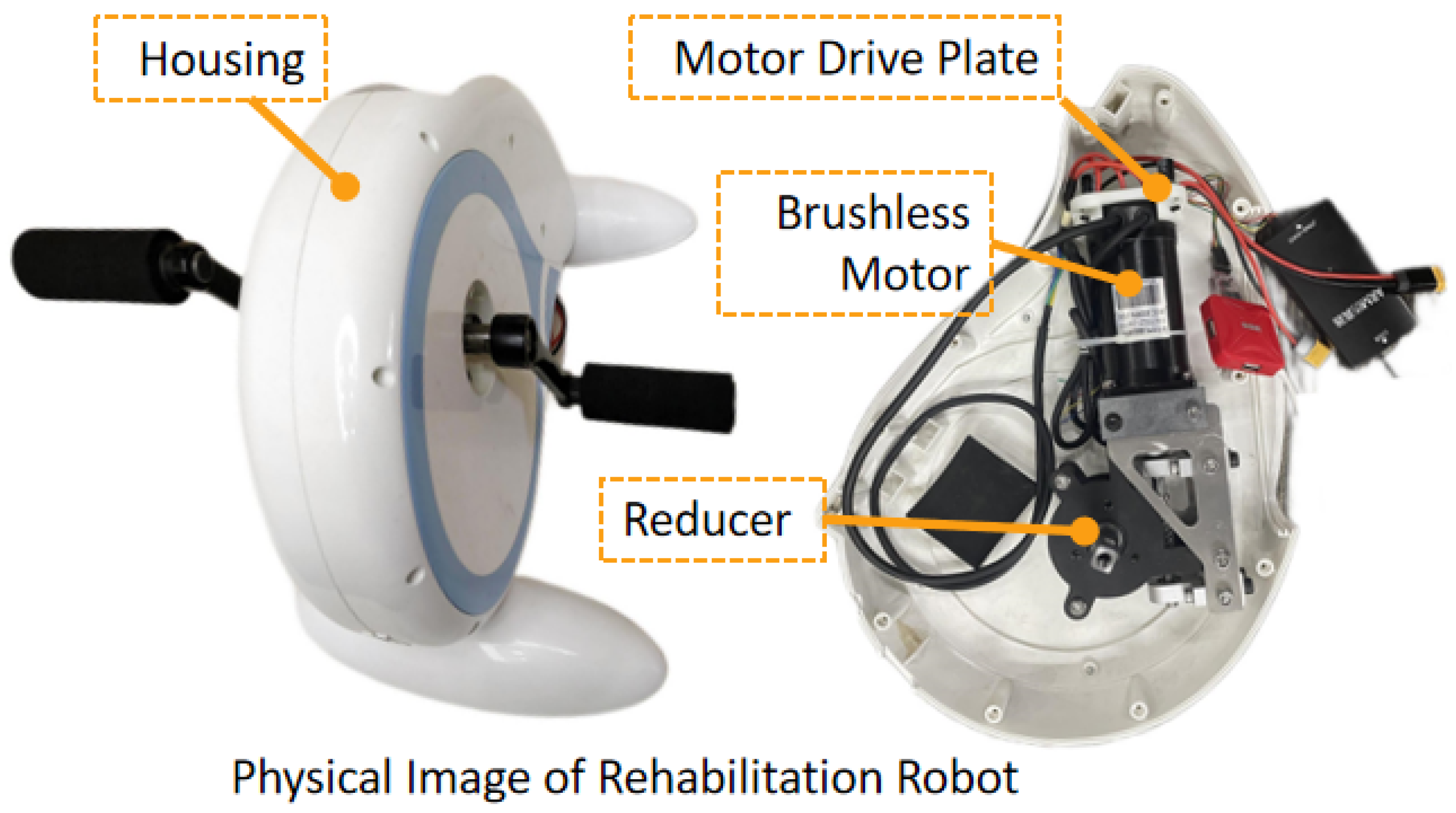
2.2. Rehabilitation Robot
2.2.1. Rehabilitation Robot Hardware
2.2.2. Rehabilitation Robot Software
3. Experiments and Results
3.1. Participants
3.2. Task and Procedure
3.2.1. Experiment 1
- Ten participants;
- Six target radii;
- Three target heights;
- Seven target buttons (In each group);
- 1260 overall target selections.
3.2.2. Experiment 2
3.3. Results
3.3.1. Experiment 1
3.3.2. Experiment 2
4. Discussion
4.1. Data Analysis Conclusion
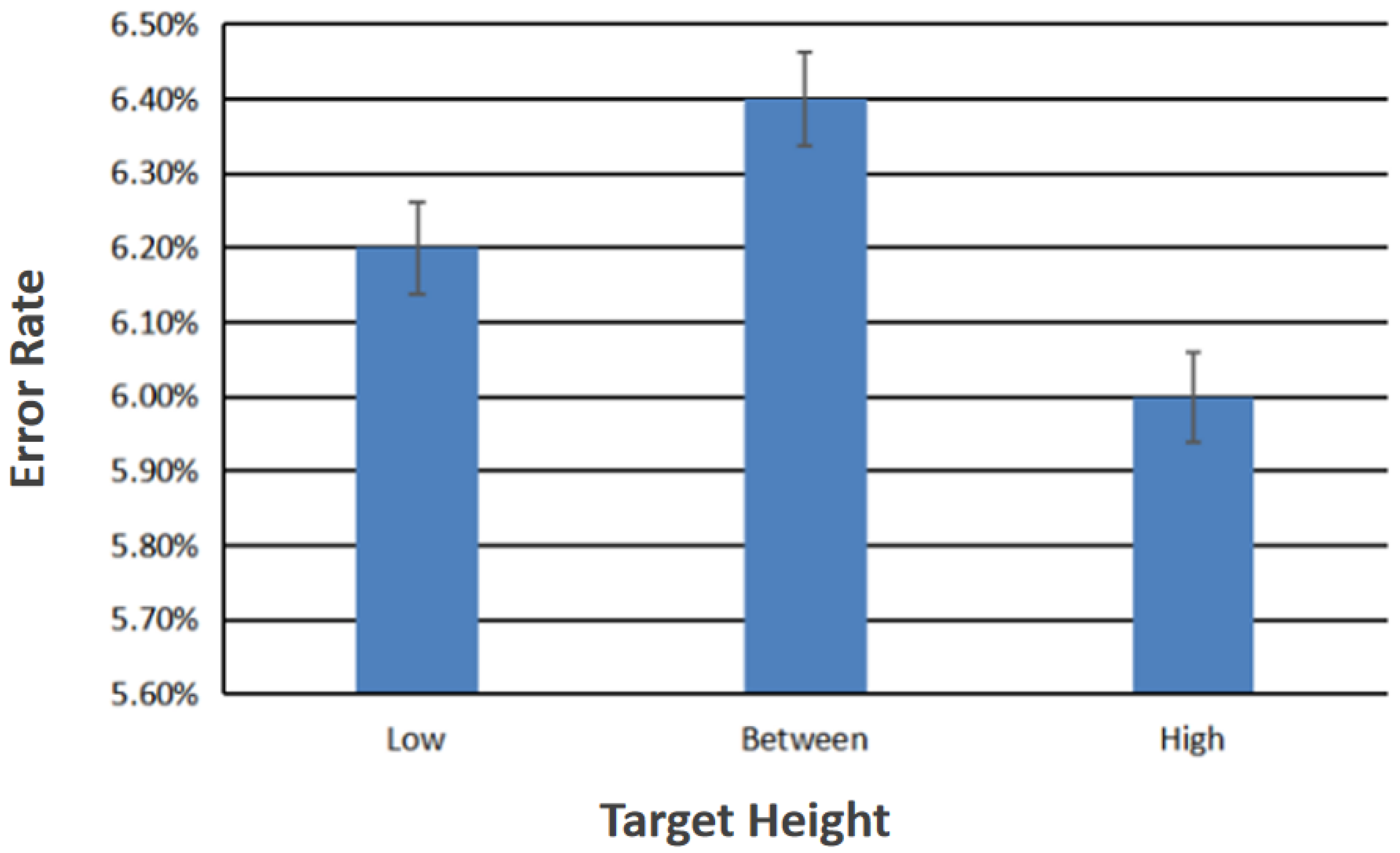
- As shown in Figure 8, if the target radius is ignored, the error rate of recognition when the target height is limited to “high” is the lowest. The error rate of recognition is the highest when the target height is limited to “between”;
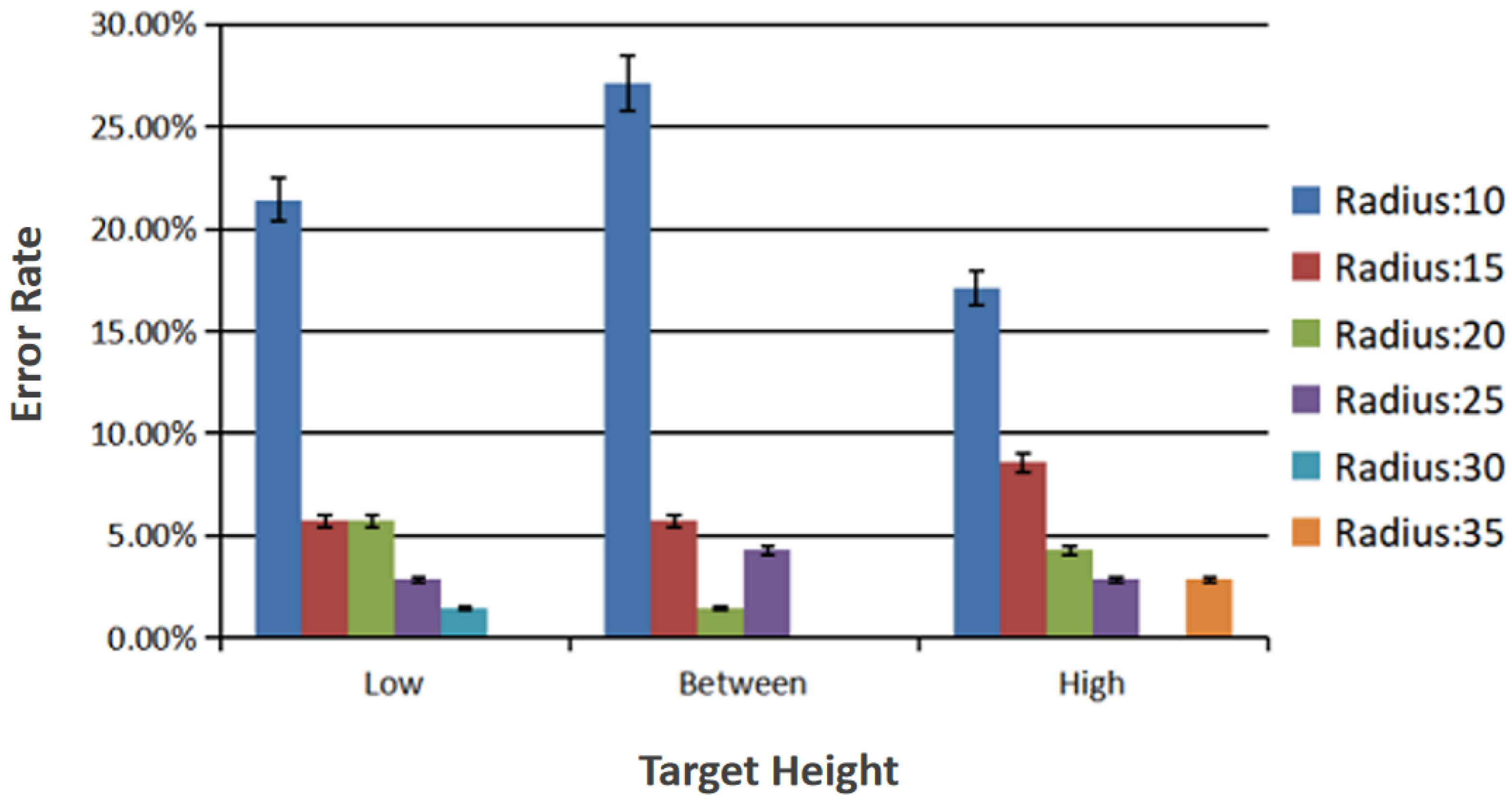
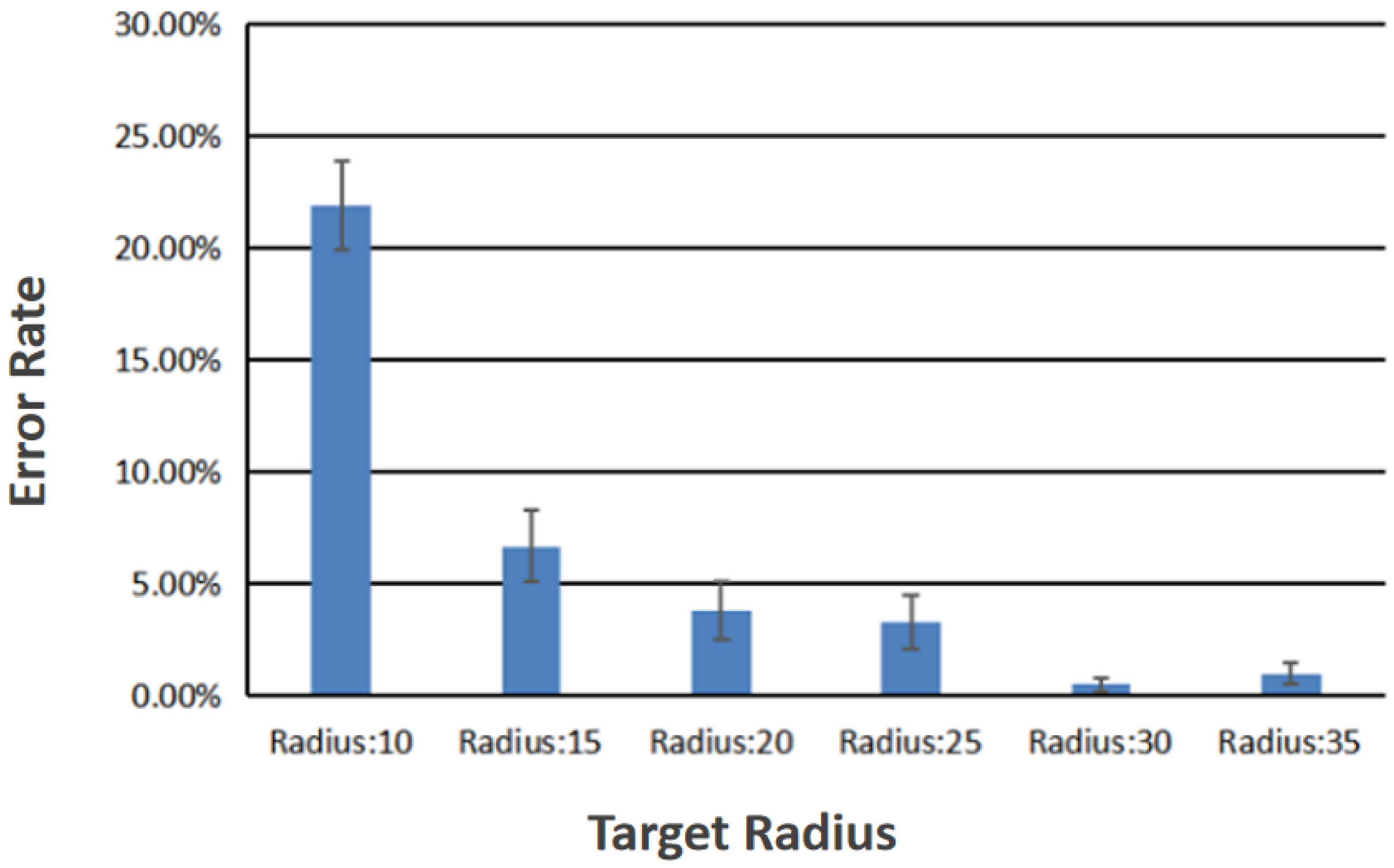
- As shown in Figure 9, if the target height is ignored, the error rate of recognition when the target radius is limited to 30 pixels is the lowest. The error rate of recognition is the highest when the target radius is limited to 10 pixels.
- The interaction between height and radius and the difference in the accuracy of hybrid control gesture recognition was not statistically significant. The target height has no significant effect on the selection error rate. The size of the target radius has a significant impact on the selection error rate.
4.2. Design Guideline
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ding, I., Jr.; Hsieh, M.C. A hand gesture action-based emotion recognition system by 3D image sensor information derived from Leap Motion sensors for the specific group with restlessness emotion problems. Microsyst. Technol. 2020. [Google Scholar] [CrossRef]
- Li, L.; Mu, X.; Li, S.; Peng, H. A review of face recognition technology. IEEE Access 2020, 8, 139110–139120. [Google Scholar] [CrossRef]
- Pilarczyk, R.; Chang, X.; Skarbek, W. Human Face Expressions from Images. Fundam. Informaticae 2019, 168, 287–310. [Google Scholar] [CrossRef]
- Lin, J.; Xiao, L.; Wu, T.; Bian, W. Image set-based face recognition using pose estimation with facial landmarks. Multimed. Tools Appl. 2020, 79, 19493–19507. [Google Scholar] [CrossRef]
- Mosquera, J.H.; Loaiza, H.; Nope, S.E.; Restrepo, A.D. Identifying facial gestures to emulate a mouse: Navigation application on Facebook. IEEE Lat. Am. Trans. 2017, 15, 121–128. [Google Scholar] [CrossRef]
- Yan, J.; Lu, G.; Bai, X.; Li, H.; Sun, N.; Liang, R. A novel supervised bimodal emotion recognition approach based on facial expression and body gesture. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2018, 101, 2003–2006. [Google Scholar] [CrossRef]
- Chu, C.H.; Peng, S.M. Implementation of Face Recognition for Screen Unlockingon Mobile Device. In Proceedings of the 23rd ACM International Conference on Multimedia, Brisbane, Australia, 26–30 October 2015; pp. 1027–1030. [Google Scholar]
- Nagi, J.; Giusti, A.; Di Caro, G.A.; Gambardella, L.M. Human control of UAVs using face pose estimates and hand gestures. In Proceedings of the 2014 9th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Bielefeld, Germany, 3–6 March 2014; pp. 1–2. [Google Scholar]
- Rozado, D.; Niu, J.; Lochner, M. Fast human-computer interaction by combining gaze pointing and face gestures. ACM Trans. Access. Comput. (TACCESS) 2017, 10, 1–18. [Google Scholar] [CrossRef]
- Feng, Y.; Uchidiuno, U.A.; Zahiri, H.R.; George, I.; Park, A.E.; Mentis, H. Comparison of kinect and leap motion for intraoperative image interaction. Surg. Innov. 2021, 28, 33–40. [Google Scholar] [CrossRef]
- Vysockỳ, A.; Grushko, S.; Oščádal, P.; Kot, T.; Babjak, J.; Jánoš, R.; Sukop, M.; Bobovskỳ, Z. Analysis of precision and stability of hand tracking with leap motion sensor. Sensors 2020, 20, 4088. [Google Scholar] [CrossRef]
- Li, H.; Wu, L.; Wang, H.; Han, C.; Quan, W.; Zhao, J. Hand gesture recognition enhancement based on spatial fuzzy matching in leap motion. IEEE Trans. Ind. Inform. 2019, 16, 1885–1894. [Google Scholar] [CrossRef]
- Kim, J.; Cha, J.; Lee, H.; Kim, S. Hand-free natural user interface for VR HMD with IR based facial gesture tracking sensor. In Proceedings of the 23rd ACM Symposium on Virtual Reality Software and Technology, Gothenburg, Sweden, 8–10 November 2017; pp. 1–2. [Google Scholar]
- Jungwirth, F.; Haslgrübler, M.; Ferscha, A. Contour-guided gaze gestures: Using object contours as visual guidance for triggering interactions. In Proceedings of the 2018 ACM Symposium on Eye Tracking Research & Applications, Warsaw, Poland, 14–17 June 2018; pp. 1–10. [Google Scholar]
- Zhang, X.; Kulkarni, H.; Morris, M.R. Smartphone-based gaze gesture communication for people with motor disabilities. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 2878–2889. [Google Scholar]
- Sun, B.; Cao, S.; He, J.; Yu, L. Affect recognition from facial movements and body gestures by hierarchical deep spatio-temporal features and fusion strategy. Neural Netw. 2018, 105, 36–51. [Google Scholar] [CrossRef] [PubMed]
- Li, X. Human–robot interaction based on gesture and movement recognition. Signal Process. Image Commun. 2020, 81, 115686. [Google Scholar] [CrossRef]
- Al-Hammadi, M.; Muhammad, G.; Abdul, W.; Alsulaiman, M.; Bencherif, M.A.; Mekhtiche, M.A. Hand gesture recognition for sign language using 3DCNN. IEEE Access 2020, 8, 79491–79509. [Google Scholar] [CrossRef]
- Jackowski, A.; Gebhard, M. Evaluation of hands-free human-robot interaction using a head gesture based interface. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 141–142. [Google Scholar]
- Guerrero-García, J.; González, C.; Pinto, D. Studying user-defined body gestures for navigating interactive maps. In Proceedings of the XVIII International Conference on Human Computer Interaction, Cancun, Mexico, 25–27 September 2017; pp. 1–4. [Google Scholar]
- Segal, A.D.; Lesak, M.C.; Suttora, N.E.; Silverman, A.K.; Petruska, A.J. iRebot: An interactive rehabilitation robot with gesture control. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 5158–5161. [Google Scholar]
- Segal, A.D.; Lesak, M.C.; Silverman, A.K.; Petruska, A.J. A Gesture-Controlled Rehabilitation Robot to Improve Engagement and Quantify Movement Performance. Sensors 2020, 20, 4269. [Google Scholar] [CrossRef]
- Gerlich, L.; Parsons, B.N.; White, A.S.; Prior, S.; Warner, P. Gesture recognition for control of rehabilitation robots. Cogn. Technol. Work 2007, 9, 189–207. [Google Scholar] [CrossRef]
- Kawarazaki, N.; Hoya, I.; Nishihara, K.; Yoshidome, T. 7 cooperative welfare robot system using hand gesture instructions. In Advances in Rehabilitation Robotics; Springer: Berlin/Heidelberg, Germany, 2004; pp. 143–153. [Google Scholar]
- Wolf, M.T.; Assad, C.; Vernacchia, M.T.; Fromm, J.; Jethani, H.L. Gesture-based robot control with variable autonomy from the JPL BioSleeve. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1160–1165. [Google Scholar]
- Wen, R.; Tay, W.L.; Nguyen, B.P.; Chng, C.B.; Chui, C.K. Hand gesture guided robot-assisted surgery based on a direct augmented reality interface. Comput. Methods Programs Biomed. 2014, 116, 68–80. [Google Scholar] [CrossRef]
- Yang, G.; Lv, H.; Chen, F.; Pang, Z.; Wang, J.; Yang, H.; Zhang, J. A novel gesture recognition system for intelligent interaction with a nursing-care assistant robot. Appl. Sci. 2018, 8, 2349. [Google Scholar] [CrossRef] [Green Version]
- Sierotowicz, M.; Connan, M.; Castellini, C. Human-in-the-loop assessment of an ultralight, low-cost body posture tracking device. Sensors 2020, 20, 890. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, J.S.; Palacios-Navarro, G.; Andaluz, V.H.; Guevara, B.S. Virtual reality-based framework to simulate control algorithms for robotic assistance and rehabilitation tasks through a standing wheelchair. Sensors 2021, 21, 5083. [Google Scholar] [CrossRef]
- Fusco, A.; Giovannini, S.; Castelli, L.; Coraci, D.; Gatto, D.M.; Reale, G.; Pastorino, R.; Padua, L. Virtual Reality and Lower Limb Rehabilitation: Effects on Motor and Cognitive Outcome—A Crossover Pilot Study. J. Clin. Med. 2022, 11, 2300. [Google Scholar] [CrossRef]
- Feng, G.; Zhang, J.; Zuo, G.; Li, M.; Jiang, D.; Yang, L. Dual-Modal Hybrid Control for an Upper-Limb Rehabilitation Robot. Machines 2022, 10, 324. [Google Scholar] [CrossRef]
- Dong, M.; Yuan, J.; Li, J. A Lower Limb Rehabilitation Robot with Rigid-Flexible Characteristics and Multi-Mode Exercises. Machines 2022, 10, 918. [Google Scholar] [CrossRef]
- Campo-Prieto, P.; Cancela-Carral, J.M.; Rodríguez-Fuentes, G. Wearable Immersive Virtual Reality Device for Promoting Physical Activity in Parkinson’s Disease Patients. Sensors 2022, 22, 3302. [Google Scholar] [CrossRef]
- Sun, W.; Peng, H.; Liu, Q.; Guo, Z.; Ibrah, O.O.; Wu, F.; Li, L. Research on Facial Emotion Recognition System Based on Exoskeleton Rehabilitation Robot. In Proceedings of the 2020 IEEE 11th International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 16–18 October 2020; pp. 481–484. [Google Scholar]
- Bien, Z.; Kim, D.J.; Chung, M.J.; Kwon, D.S.; Chang, P.H. Development of a wheelchair-based rehabilitation robotic system (KARES II) with various human-robot interaction interfaces for the disabled. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Monterey, CA, USA, 20–24 July 2003; Volume 2, pp. 902–907. [Google Scholar]
- Chaparro-Rico, B.D.; Cafolla, D.; Tortola, P.; Galardi, G. Assessing stiffness, joint torque and ROM for paretic and non-paretic lower limbs during the subacute phase of stroke using lokomat tools. Appl. Sci. 2020, 10, 6168. [Google Scholar] [CrossRef]
- Díaz, I.; Gil, J.J.; Sánchez, E. Lower-limb robotic rehabilitation: Literature review and challenges. J. Robot. 2011, 2011, 759764. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Li, G.; Sun, Y.; Jiang, G.; Kong, J.; Ju, Z.; Jiang, D. A review of upper and lower limb rehabilitation training robot. In Proceedings of the International Conference on Intelligent Robotics and Applications, Wuhan, China, 16–18 August 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 570–580. [Google Scholar]
- Kalman, R.E.; Bucy, R.S. New results in linear filtering and prediction theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial No | Gear Shift | Serial No | Gear Shift |
|---|---|---|---|
| 1 | Shift gear A to stop | 7 | Shift gear B to stop |
| 2 | Shift gear C to stop | 8 | Shift gear A to B |
| 3 | Shift gear B to A | 9 | Shift gear C to A |
| 4 | Shift gear A to C | 10 | Shift gear B to C |
| 5 | Shift gear C to B | 11 | Stop switching to gear A |
| 6 | Stop switching to gear B | 12 | Stop switching to gear C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Zhang, X.; Zhang, N.; Meng, S.; Liu, T.; Wang, S.; Pan, M.; Zhang, X.; Yi, J. Hybrid Target Selections by ”Hand Gestures + Facial Expression” for a Rehabilitation Robot. Sensors 2023, 23, 237. https://doi.org/10.3390/s23010237
Han Y, Zhang X, Zhang N, Meng S, Liu T, Wang S, Pan M, Zhang X, Yi J. Hybrid Target Selections by ”Hand Gestures + Facial Expression” for a Rehabilitation Robot. Sensors. 2023; 23(1):237. https://doi.org/10.3390/s23010237
Chicago/Turabian StyleHan, Yi, Xiangliang Zhang, Ning Zhang, Shuguang Meng, Tao Liu, Shuoyu Wang, Min Pan, Xiufeng Zhang, and Jingang Yi. 2023. "Hybrid Target Selections by ”Hand Gestures + Facial Expression” for a Rehabilitation Robot" Sensors 23, no. 1: 237. https://doi.org/10.3390/s23010237