

Resistive-Based Micro-Kelvin Temperature Resolution for Ultra-Stable Space Experiments
 , , , ,
, , , ,
Abstract
:1. Introduction
2. Setup Description
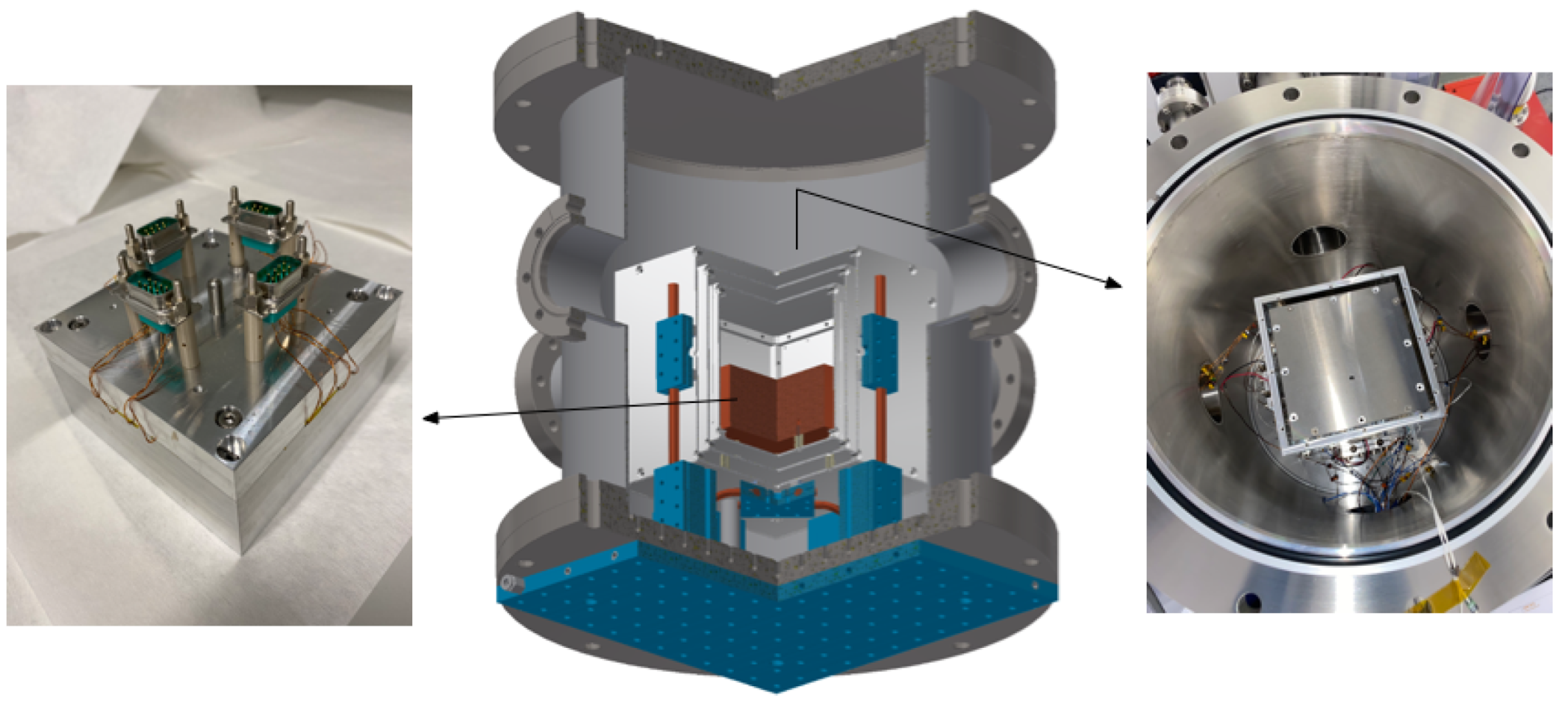
2.1. Low-Frequency Test Bench Design
2.2. Sensor Readout Electronics Design
- The sensitivity increases with the voltage applied on the sensor; the obvious downside is that the power dissipation on the sensor itself does as well, leading to perturbations at the sensed location.
- The sensitivity does not change with the thermistor resistance.
- A higher parameter increases the sensitivity without any downside.
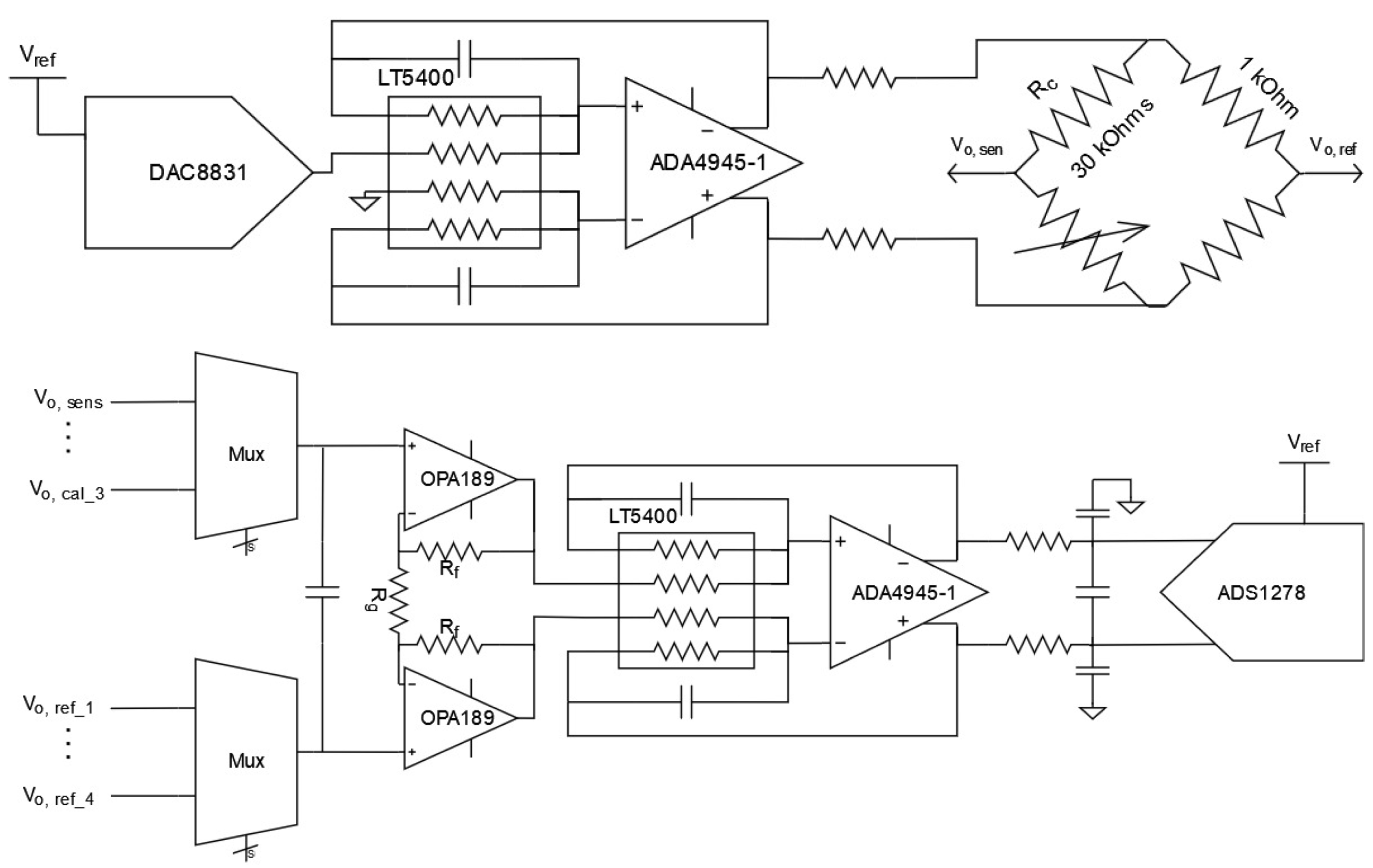
2.3. Read-Out Implementation
2.3.1. Measurement Principle
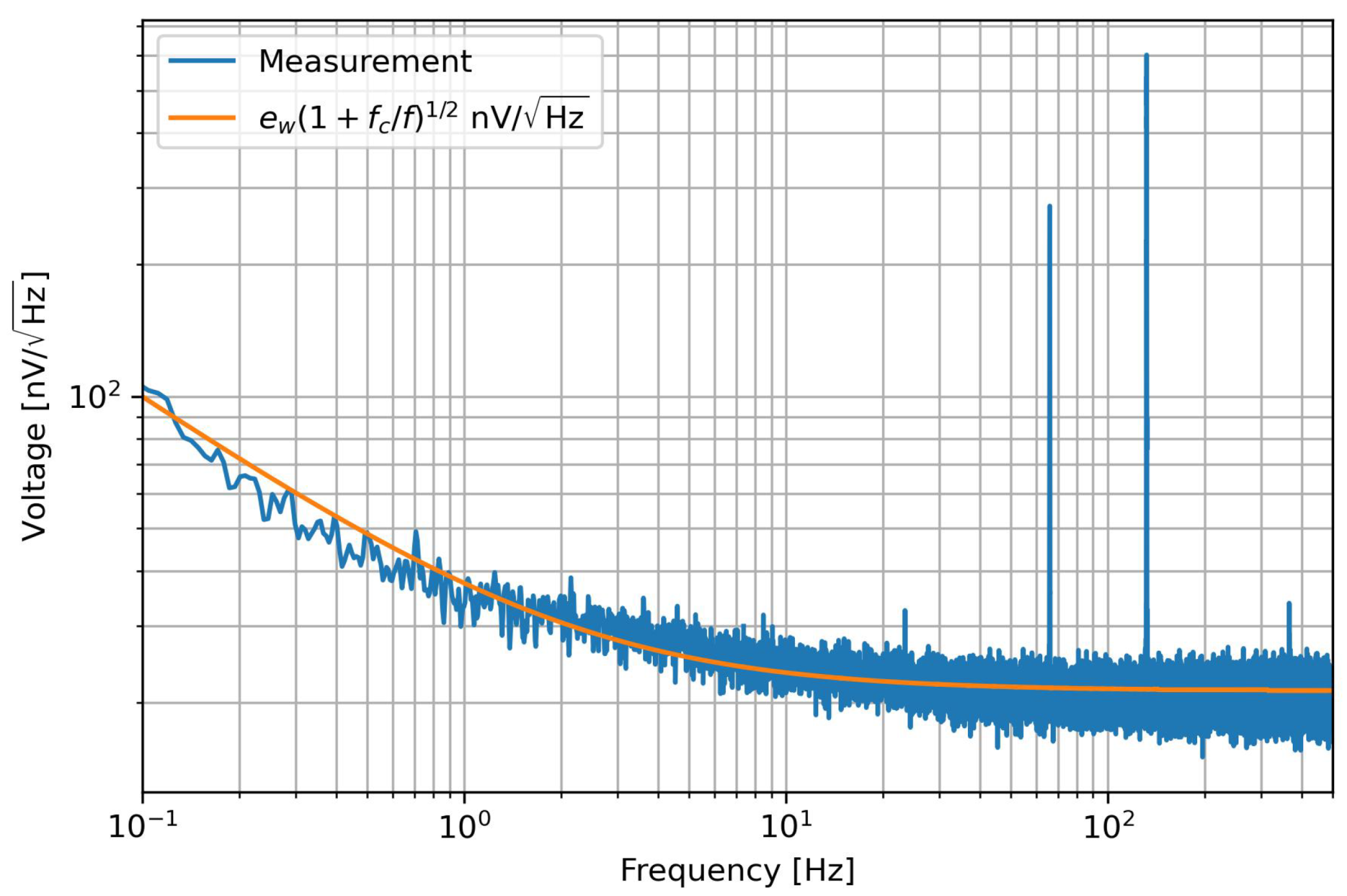
2.3.2. Noise Analysis
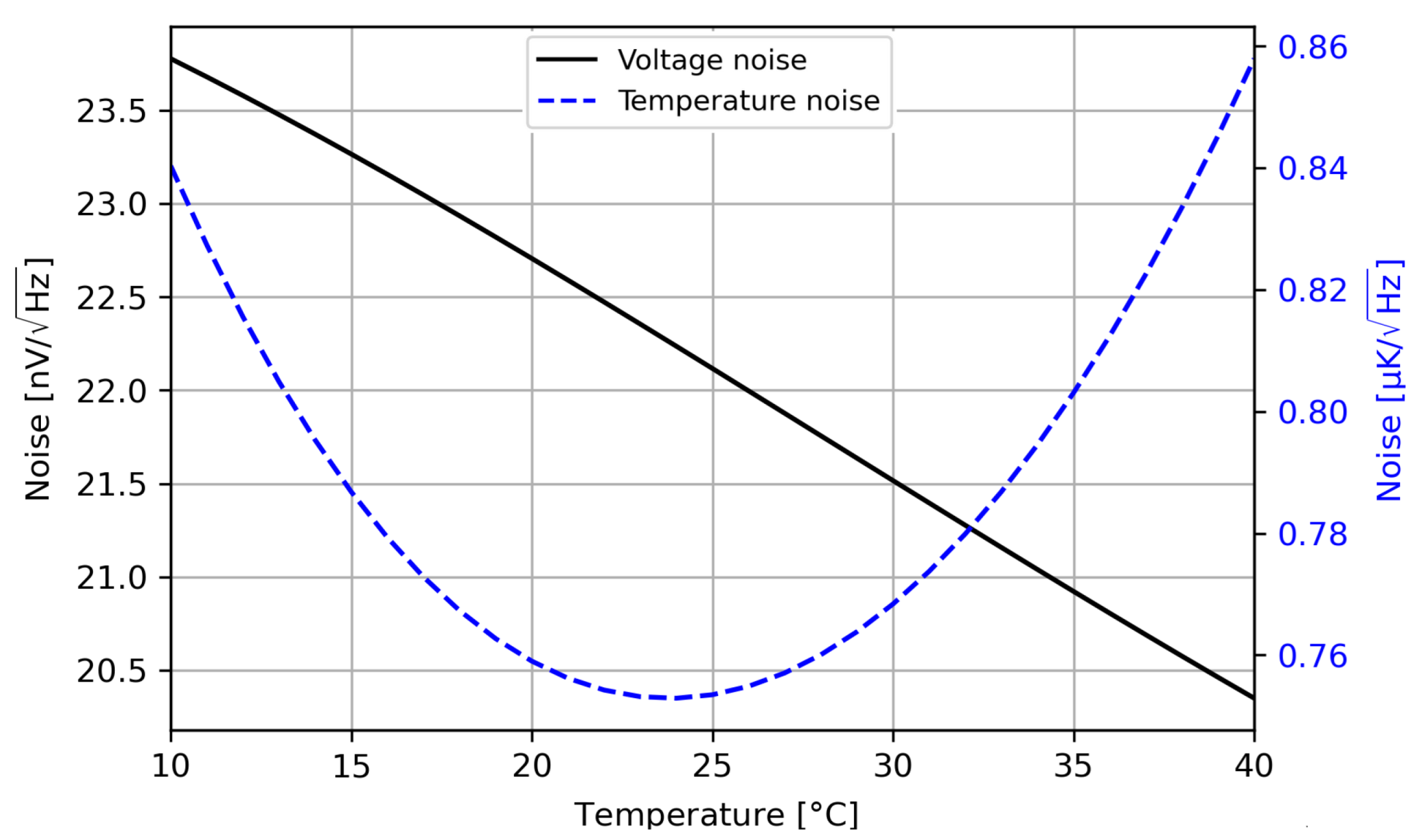
2.4. Temperature Coefficient
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stefansson, G.; Hearty, F.; Robertson, P.; Mahadevan, S.; Anderson, T.; Levi, E.; Bender, C.; Nelson, M.; Monson, A.; Blank, B.; et al. A versatile technique to enable sub-milli-kelvin instrument stability for precise radial velocity measurements: Tests with the habitable-zone planet finder. Astrophys. J. 2016, 833, 175. [Google Scholar] [CrossRef]
- Sheard, B.S.; Heinzel, G.; Danzmann, K.; Shaddock, D.A.; Klipstein, W.M.; Folkner, W.M. Intersatellite laser ranging instrument for the GRACE follow-on mission. J. Geod. 2012, 86, 1083–1095. [Google Scholar] [CrossRef]
- Aguilera, D.N.; Ahlers, H.; Battelier, B.; Bawamia, A.; Bertoldi, A.; Bondarescu, R.; Bongs, K.; Bouyer, P.; Braxmaier, C.; Cacciapuoti, L.; et al. STE-QUEST—test of the universality of free fall using cold atom interferometry. Class. Quantum Gravity 2014, 31, 115010. [Google Scholar] [CrossRef] [Green Version]
- Lämmerzahl, C.; Dittus, H.; Peters, A.; Schiller, S. OPTIS: A satellite-based test of special and general relativity. Class. Quantum Gravity 2001, 18, 2499–2508. [Google Scholar] [CrossRef]
- Sanjuan, J.; Abich, K.; Gohlke, M.; Resch, A.; Schuldt, T.; Wegehaupt, T.; Barwood, G.P.; Gill, P.; Braxmaier, C. Long-term stable optical cavity for special relativity tests in space. Opt. Express 2019, 27, 36206–36220. [Google Scholar] [CrossRef] [Green Version]
- Amaro-Seoane, P.; Audley, H.; Babak, S.; Baker, J.; Barausse, E.; Bender, P.; Berti, E.; Binetruy, P.; Born, M.; Bortoluzzi, D.; et al. Laser Interferometer Space Antenna. arXiv 2017, arXiv:1702.00786. [Google Scholar] [CrossRef]
- Carbone, L.; Cavalleri, A.; Ciani, G.; Dolesi, R.; Hueller, M.; Tombolato, D.; Vitale, S.; Weber, W.J. Thermal gradient-induced forces on geodesic reference masses for LISA. Phys. Rev. D 2007, 76, 102003. [Google Scholar] [CrossRef] [Green Version]
- Nofrarias, M.; Marin, A.F.G.; Lobo, A.; Heinzel, G.; Ramos-Castro, J.; Sanjuan, J.; Danzmann, K. Thermal diagnostic of the optical window on board LISA Pathfinder. Class. Quantum Gravity 2007, 24, 5103–5121. [Google Scholar] [CrossRef] [Green Version]
- Nofrarias, M.; Gibert, F.; Karnesis, N.; García, A.F.; Hewitson, M.; Heinzel, G.; Danzmann, K. Subtraction of temperature induced phase noise in the LISA frequency band. Phys. Rev. D 2013, 87, 102003. [Google Scholar] [CrossRef] [Green Version]
- Gibert, F.; Nofrarias, M.; Karnesis, N.; Gesa, L.; Martín, V.; Mateos, I.; Lobo, A.; Flatscher, R.; Gerardi, D.; Burkhardt, J.; et al. Thermo-elastic induced phase noise in the LISA Pathfinder spacecraft. Class. Quantum Gravity 2015, 32, 045014. [Google Scholar] [CrossRef]
- Weng, W.; Anstie, J.D.; Stace, T.M.; Campbell, G.; Baynes, F.N.; Luiten, A.N. Nano-Kelvin Thermometry and Temperature Control: Beyond the Thermal Noise Limit. Phys. Rev. Lett. 2014, 112, 160801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tan, S.; Wang, S.; Saraf, S.; Lipa, J.A. Pico-Kelvin thermometry and temperature stabilization using a resonant optical cavity. Opt. Express 2017, 25, 3578–3593. [Google Scholar] [CrossRef]
- Toda, M.; Inomata, N.; Ono, T.; Voiculescu, I. Cantilever beam temperature sensors for biological applications. IEEJ Trans. Electr. Electron. Eng. 2017, 12, 153–160. [Google Scholar] [CrossRef] [Green Version]
- Qu, J.F.; Benz, S.P.; Rogalla, H.; Tew, W.L.; White, D.R.; Zhou, K.L. Johnson noise thermometry. Meas. Sci. Technol. 2019, 30, 112001. [Google Scholar] [CrossRef]
- Heidarpour Roshan, M.; Zaliasl, S.; Joo, K.; Souri, K.; Palwai, R.; Chen, L.W.; Singh, A.; Pamarti, S.; Miller, N.J.; Doll, J.C.; et al. A MEMS-Assisted Temperature Sensor With 20- μK Resolution, Conversion Rate of 200 S/s, and FOM of 0.04 pJK2. IEEE J. Solid-State Circuits 2017, 52, 185–197. [Google Scholar] [CrossRef]
- Ferreiro-Vila, E.; Molina, J.; Weituschat, L.M.; Gil-Santos, E.; Postigo, P.A.; Ramos, D. Micro-Kelvin Resolution at Room Temperature Using Nanomechanical Thermometry. ACS Omega 2021, 6, 23052–23058. [Google Scholar] [CrossRef]
- Sanjuán, J.; Lobo, A.; Nofrarias, M.; Ramos-Castro, J.; Riu, P.J. Thermal diagnostics front-end electronics for LISA Pathfinder. Rev. Sci. Instruments 2007, 78, 104904. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Castelli, E.; Cavalleri, A.; Cesarini, A.; Cruise, A.M.; et al. Temperature stability in the sub-milliHertz band with LISA Pathfinder. Mon. Not. R. Astron. Soc. 2019, 486, 3368–3379. [Google Scholar] [CrossRef]
- Lobo, A.; Nofrarias, M.; Ramos-Castro, J.; Sanjuán, J. On-ground tests of the LISA PathFinder thermal diagnostics system. Class. Quantum Gravity 2006, 23, 5177–5193. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.F.; Nevsky, A.; Cardace, M.; Schiller, S.; Legero, T.; Häfner, S.; Uhde, A.; Sterr, U. A compact, robust, and transportable ultra-stable laser with a fractional frequency instability of. Rev. Sci. Instruments 2014, 85, 113107. [Google Scholar] [CrossRef]
- Webster, S.A.; Oxborrow, M.; Pugla, S.; Millo, J.; Gill, P. Thermal-noise-limited optical cavity. Phys. Rev. A 2008, 77, 033847. [Google Scholar] [CrossRef]
- Sanjuan, J.; Gürlebeck, N.; Braxmaier, C. Mathematical model of thermal shields for long-term stability optical resonators. Opt. Express 2015, 23, 17892–17908. [Google Scholar] [CrossRef] [Green Version]
- Meade, M.L. Lock-in Amplifiers: Principles and Applications; IEE Electrical Measurement Series; Inst of Engineering & Technology: London, UK, 1983. [Google Scholar]
- Sanjuan, J.; Lobo, A.; Nofrarias, M.; Ramos-Castro, J.; Mateos, N.; Xirgu, X. Magnetic polarisation effects of temperature sensors and heaters in LISA Pathfinder. J. Phys. Conf. Ser. 2009, 154, 012001. [Google Scholar] [CrossRef]
- Faierstein, H. New high precision foil resistors for space projects, with zero temperature coefficient very low power coefficient and high reliability. In Proceedings of the European Space Components Conference, ESCCON 2002, Toulouse, France, 24–27 September 2002; Volume 507, p. 49. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature Noise Density | Contribution on the Overall | |
|---|---|---|
| [] | [%] | |
| Sensor Arm | 0.5 | 57 |
| Reference Arm | 0.1 | 2 |
| Difference Amplification | 0.3 | 18 |
| Fully Differential Amplifier | 0.2 | 4 |
| Analog-to-digital converter | 0.3 | 19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roma-Dollase, D.; Gualani, V.; Gohlke, M.; Abich, K.; Morales, J.; Gonzalvez, A.; Martín, V.; Ramos-Castro, J.; Sanjuan, J.; Nofrarias, M. Resistive-Based Micro-Kelvin Temperature Resolution for Ultra-Stable Space Experiments. Sensors 2023, 23, 145. https://doi.org/10.3390/s23010145
Roma-Dollase D, Gualani V, Gohlke M, Abich K, Morales J, Gonzalvez A, Martín V, Ramos-Castro J, Sanjuan J, Nofrarias M. Resistive-Based Micro-Kelvin Temperature Resolution for Ultra-Stable Space Experiments. Sensors. 2023; 23(1):145. https://doi.org/10.3390/s23010145
Chicago/Turabian StyleRoma-Dollase, David, Vivek Gualani, Martin Gohlke, Klaus Abich, Jordan Morales, Alba Gonzalvez, Victor Martín, Juan Ramos-Castro, Josep Sanjuan, and Miquel Nofrarias. 2023. "Resistive-Based Micro-Kelvin Temperature Resolution for Ultra-Stable Space Experiments" Sensors 23, no. 1: 145. https://doi.org/10.3390/s23010145