1. Introduction
Recently, interest in LoRa networks has been increasing due to the absence of an industrial IoT network capable of reliable data transmission at a low price. In keeping with this need, remarkable research progress has been made on industrial multi-hop LoRa networks by enabling reliable real-time data transmission and supporting a wide area with many nodes with the use of a slot scheduling-based data transmission method [
1]. However, in industrial applications supporting worker safety, real-time machine management, etc., LoRa terminals (nodes) can be attached to mobile equipment or carried by workers. This requires a data transmission protocol for dynamic multi-hop LoRa networks. However, designing a reliable and real-time data transmission protocol in a dynamic multi-hop LoRa network is a challenge because it involves topology maintenance in a slot scheduling-based approach. This problem gets worse in LoRa networks with a low data rate and a high probability of message collisions.
So far, many studies designed to deal with reliable data transmission in dynamic wireless networks have been conducted under three areas of communication technology: cellular networks, wireless sensor networks (WSNs), and low-power wide-area networks (LPWANs). The cellular network has the advantage of reliably collecting data while covering a wide area and can easily support node mobility because it uses a simple star topology and operates at high bandwidth. However, when a node enters a wireless communication shadow area, it suffers from reduced reliability of data transmission and high energy consumption. Moreover, cellular networks are seldom used for monitoring applications except for special cases because every node has to pay an expensive communication fee.
Meanwhile, there have been many studies on industrial WSNs based on the IEEE 802.15.4 standard [
2] for low-cost data collection over the past decade. In WSNs, nodes that are typically considered stationary send data to a sink via multiple radio hops. Several protocols using a slot scheduling have been proposed to transmit data reliably in WSNs [
3,
4,
5,
6]. However, in industrial sites, even though nodes send data according to a slot schedule, the reliability of data transmission may not be secured due to various communication obstacles and external interferences. Furthermore, node mobility not only increases control overhead but also causes data loss temporarily due to link failure and frequent updates of a slot schedule, making it more difficult to secure data transmission reliability. Recently, the slotted sense multiple access (SSMA) protocol [
7] using a tree topology and sharable slots addressed the issue of data transmission reliability under various signal interferences in industrial environments and node mobility. In this method, instead of allocating a tiny slot to each link, a shareable slot is allocated to each tree level of the tree topology, and nodes at each tree level send data to nodes one tree level below them through contention using CSMA/CA within a sharable slot allocated to their tree level. In this way, data transmission is progressively performed level by level from the highest tree level to the lowest tree level to which a sink node belongs. This method eliminates scheduling overhead by making slot scheduling topology-independent and greatly improves the reliability of data transmission by limiting channel contention to nodes in the same tree level. However, since this approach still allows channel contention, it is not free from data collision. To further improve the reliability, the authors in [
8] proposed a smart multi-channel
SSMA (SMC-SSMA) protocol. In this approach, in the process of acquiring a common channel for secure data transmission, each node includes “delay time before sending its own control message” in the control message it transmits. Then, every node learns the delay times of its neighboring nodes and hidden nodes by overhearing the control messages and then sets its own delay time before sending a control message so that its control messages can never collide with those transmitted by its neighboring and hidden nodes. After acquiring the common channel, a node transmits data using a data channel not used by its neighbors, enabling parallel transmission.
Despite remarkable progress in these dynamic WSNs, WSNs in industrial fields still have difficulties in securing data transmission reliability due to obstacles and/or external interference and have limitations in covering a wide area or supporting densely deployed nodes. Some studies [
9,
10,
11,
12,
13,
14] on the use of LoRa technology [
15] to overcome those difficulties and limitations have been conducted. It is said in the LoRa specification [
16] that a LoRa transceiver can cover up to 2 km even with the smallest spreading factor; however, its transmission range can be reduced to within hundreds or tens of meters due to signal attenuation by obstructions and the installations of nodes inside
wireless unfriendly zones (WUZs) such as underground tunnels and enclosed spaces. Furthermore, in industrial monitoring and control applications, a server may collect data from each node every tens of seconds or even every few seconds. Therefore, a LoRa protocol must address how to achieve high reliability of data transmission against signal attenuation and heavy traffic.
Some LoRa protocols have been proposed to tackle the problem of reliability and/or network coverage. In [
13], the authors proposed the real-time LoRa (RT-LoRa) protocol that enables real-time and reliable data transmission by using a distributed slot scheduling method. Another slot scheduling-based protocol, TS-LoRa [
14], allows nodes to determine a slot in a frame autonomously in order to reduce slot scheduling overhead. However, these protocols suffer from the limitation of network coverage in industrial fields. To resolve coverage limitation, some studies focused on multi-hop LoRa networks [
17,
18,
19,
20,
21,
22]. In [
17], the protocol extends network coverage by having the end node transmit data using a route established by a simplified Destination-Sequenced Distance Vector (DSDV) protocol [
23]. This protocol suffers from high energy consumption by routing data via multiple radio hops, and also from data collision due to the nature of contention-based data transmission in high traffic. The authors in [
18] proposed CT-LoRa, a multi-hop LoRa protocol based on the Glossy protocol [
24], that takes advantage of
concurrent transmission (CT) to improve network reliability. This approach relies on flooding for data transmission while removing the overhead of constructing and maintaining a multi-hop topology. However, the flooding is not free from the viewpoint of network overhead and energy consumption. The studies of the same category include the LoRa-Mesh protocol [
19] in which a GW constructs and maintains a tree path to every node in the network by selecting a path that has the smallest hop count and provides a good link quality. In order to get data from a specified node, GW sends a query message to the node along the tree path. This approach improves the reliability of data transmission significantly; it incurs a high control overhead. According to experiment results, the above-mentioned multi-hop LoRa protocols effectively extend the network coverage as well as provide high reliability on data transmissions. However, these protocols may not be suitable for monitoring applications because they have difficulty in dealing with high traffic networks.
Recently, the authors in [
1] proposed the Two-Hop RT-LoRa protocol to extend network coverage in which nodes send data periodically, while some nodes make use of relay nodes to send data to GW. The protocol uses a real-time slot schedule for a two-hop tree topology to remove data collision while it satisfies the time constraint of every data transmission. According to the experimental results, the two-hop protocol using the lowest spreading factor SF7 showed a high packet delivery rate of more than 95% in the rough network deployment scenario where the one-hop protocol using the relatively high spreading factor SF10 mostly fails to transmit data. In addition, according to the analysis results, the two-hop protocol could improve energy consumption by almost 60% compared to the one-hop protocol. However, the protocol did not deal with the change of topology. In wireless networks with a relatively high bandwidth such as WiFi and IEEE 802.15.4, the change of topology may be easily handled by exchanging control messages. However, in a dynamic LoRa network, a method is required to quickly detect link failures and update slot schedules efficiently in response to topology changes while using a small number of control messages to reduce message collisions. To the best of our knowledge, no one has ever conducted research on a multi-hop LoRa protocol that can deal with node mobility.
This paper presents a reliable and real-time data transmission protocol for dynamic multi-hop LoRa networks. This study basically extends the slot scheduling-based Two-Hop RT-LoRa protocol proposed in the previous study [
1], further covering the technical aspects of the implementation and operation of a dynamic multi-hop LoRa network such as auto-configuration of a multi-hop LoRa network, slot scheduling, topology maintenance, and updating of a slot schedule. First, in autonomously configuring a two-hop network, it is important to ensure that the tree topology can be gradually and stably built in the process of individual node registration. Therefore, a GW includes the list of registered nodes in the tree construction message before broadcasting so that a node can confirm whether it is registered or not. Considering that the one-hop relay nodes play an important role in the stability of tree topology, a node decides whether it can become a relay by itself based on its link quality. As a server generates and broadcasts slot scheduling information based on the tree topology, each node can easily and autonomously create a slot schedule that does not conflict with the slot schedules of other nodes. In this process, the server provides the retransmission slot schedule for relay nodes so that all relay nodes can safely rebroadcast the slot scheduling information to their children without collision. During data transmission, when a node detects link failure, it immediately reports the change of link state to the GW using an unscheduled slot to prevent collision with other data transmissions. Upon receiving this, the GW completes topology maintenance by transmitting only updated slot scheduling information using the DL message.
The rest of this paper is organized as follows.
Section 2 describes the research background.
Section 3 gives a detailed design of the proposed protocol and is followed by the discussion of simulation and experimental results in
Section 4. Finally, the conclusion is drawn in
Section 5.
2. Background
2.1. Network Model
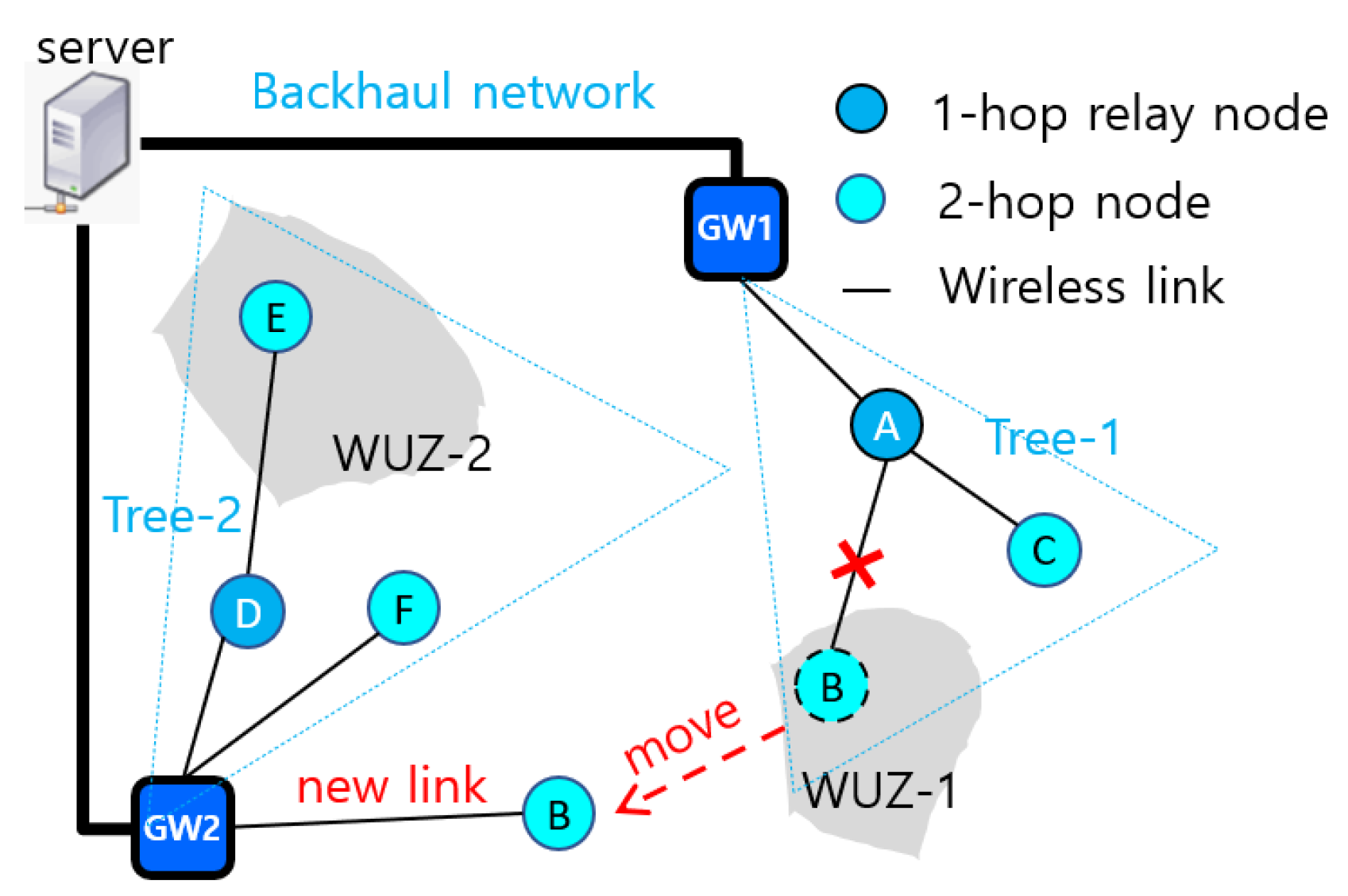
A considered LoRa network consists of one server, multiple gateways (GWs) and a number of end devices or nodes. A server and GWs are interconnected by a wired high-speed backhaul network. End nodes are mobile and battery-powered. A server (or a GW) collects sensor data from end nodes via GWs periodically and provides services based on the analysis of the collected data. Nodes may be installed in a WUZ, such as an underground tunnel and an enclosed space. Some nodes may not have a direct connection to the GW due to signal attenuation. Every node can act as a relay that forwards data to a GW. Nodes can form a two-hop tree originating from a GW in which an internal node acts as a relay node, and a leaf node can be either a 1-hop node that connects to GW directly or a 2-hop node that connects to a relay node. A node that does not belong to a tree is said to be an orphan node. For time synchronization and/or command transmission, a GW broadcasts a downlink message periodically to all end nodes. Thus, all relay nodes are to rebroadcast the received downlink message towards 2-hop nodes.
Figure 1 shows a simple LoRa network with two GWs and six end nodes. Two nodes,
B and
E, are deployed in WUZ-1 and WUZ-2, respectively. Nodes
A,
B,
C form
Tree-1 originated from GW1, and nodes
D,
E,
F form
Tree-2 originated from GW2 where nodes
A and
D are relay nodes. The figure also illustrates the movement of node
B connecting to GW2 after disconnecting from node
A.
2.2. Problem Identification
Recently, the authors in [
1] proposed a Two-Hop Real-Time LoRa protocol that uses a two-hop tree topology for extension of network coverage and a two-hop slot scheduling for reliable data transmission. Based on the slot scheduling information transmitted by a GW, every node generates its own slot schedule in a distributed manner such that it satisfies its own transmission period if it transmits data according to the slot schedule, and does not cause any collision in data transmission with other nodes. However, this approach does not respond to the change of topology.
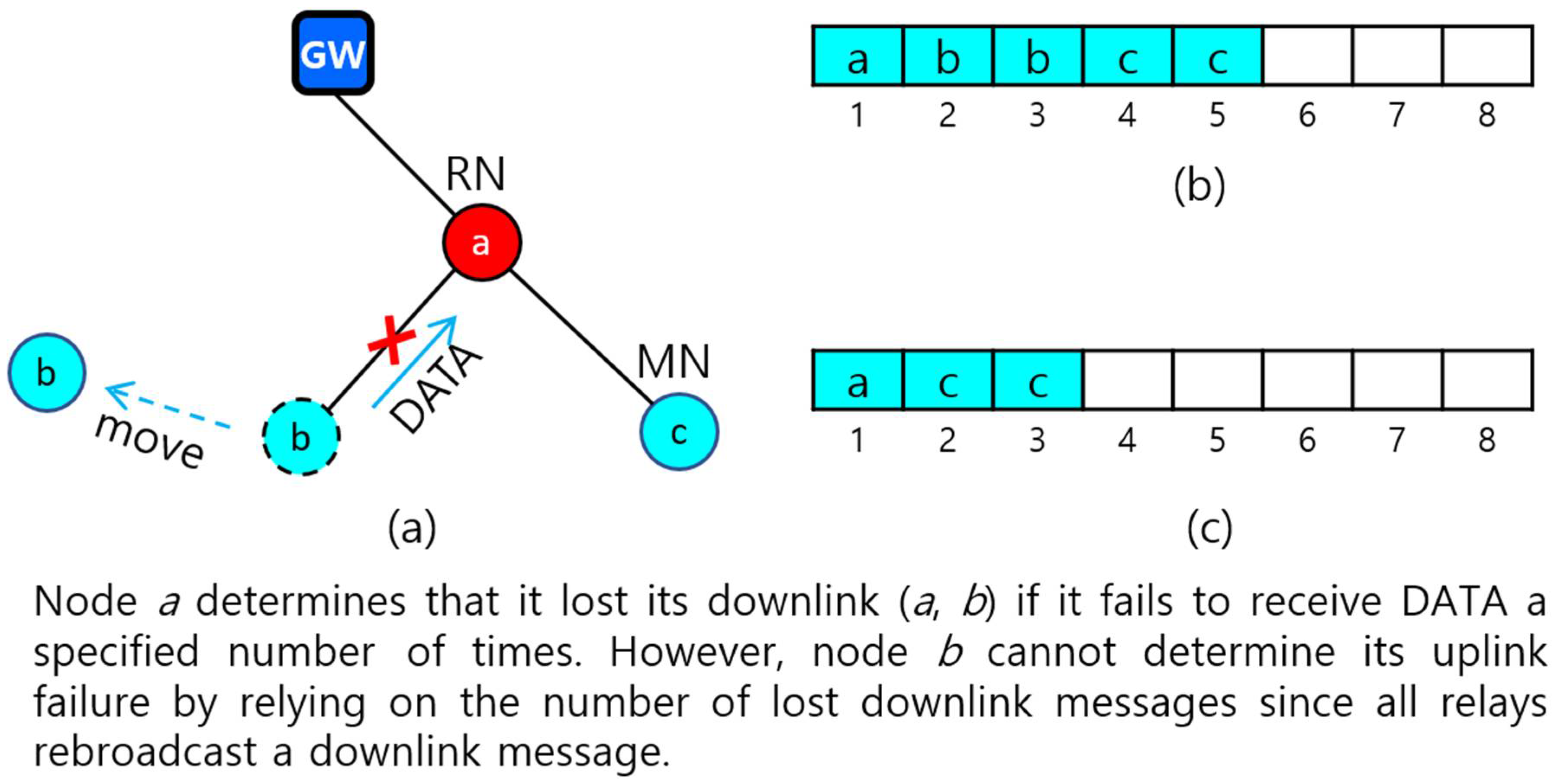
There are some issues to consider in designing a real-time protocol for dynamic two-hop LoRa networks. First, the protocol should be able to detect the uplink or downlink failure of a node quickly. A node, either a GW or a relay node, can detect its downlink failure by counting the amount of missing data from its child. Furthermore, a 1-hop (relay) node can detect its uplink failure easily by counting the number of missing downlink messages from a GW. However, it is not possible for a 2-hop node to use a downlink message to detect uplink failure. The reason is that all relay nodes rebroadcast an identical downlink message. Therefore, this requires a different method using downlink messages. One way is that a 2-hop node can detect its uplink failure by using the downlink failure information of its parent. For example, consider a simple two-hop network topology in
Figure 2a that consists of relay node
a and 2-hop nodes
b and
c. Let a downlink state of node
x with
k children,
, be represented as
)). Suppose that node
a detected the failure of its downlink (
a,
b) and reported its changed downlink state (
a(
c)) to GW. If the GW broadcasts (
a(
c)), node
b will know of the failure of uplink (
b,
a) if it has already connected to GW.
Second, the protocol should be able to update a slot schedule quickly for the change of topology. If GW detects the downlink failure of a 1-hop relay or leaf node, the GW simply releases the slots allocated to that node and its children, and then broadcasts a downlink message to request the relevant nodes to switch to orphan nodes. Then, each orphan node needs to individually rejoin the tree and be allocated slots. However, when a relay node detects a downlink failure for a child, the slot rescheduling becomes a bit more complicated. In this case, the relay node will first report its changed downlink state to GW so that the GW can generate a new slot schedule for the relay node. The child can know its uplink failure if it receives the changed link state of its parent from GW. For example, referring to
Figure 2, suppose that GW has a
slot schedule (SS) for the downlink state (
a(
b,
c)) of node
a, as
SS(
a) = (
a = (1),
b = (2, 3),
c = (4, 5)) as shown in
Figure 2b. Note that every 2-hop node need two slots, one for its own transmission and another for its parent to forward the received data. If node
a detects its downlink failure due to the movement of node
b and reports a changed downlink state (
a(
c)) to GW, the new slot schedule becomes
SS(
a) = (
a = (1),
c = (2, 3)) as in
Figure 2c.
Third, the protocol has to handle a
slot schedule conflict problem that occurs when multiple nodes use the same slot temporarily. Suppose that node
a has a new slot schedule shown in
Figure 2c after it detects the failure of its downlink (
a,
b). The problem is that node
b may still use its previous slot number 2 until it finds a new parent.
Fourth, as GWs and relay nodes form the mobile backbone of the LoRa network, it is of great importance to build and maintain the network topology in such a way that the relay nodes have stable uplink. If a one-hop relay node loses an uplink, a significant amount of overhead may occur in the process of topology change and slot rescheduling.
Finally, one important question is whether it is or is not appropriate to have three or more radio hops in a low data rate LoRa network, even at the cost of the increased control overhead and the increased likelihood of collisions due to increased traffic. For example, if k-hop is allowed in multi-hop LoRa networks, the data generated at the (k + 1)th tree level must be transmitted k times before reaching a GW. This may increase interference severely due to the long transmission distance of LoRa. However, even though k is limited to 2, the use of two GWs can extend the coverage of a LoRa network up to eight hops such that two GWs cover three nodes arranged linearly between them, and each GW additionally covers two nodes arranged linearly on opposite sides as ) where and are gateways and , indicates an end node.
In conclusion, this paper aims at designing a multi-hop LoRa protocol in consideration of the issues discussed so far.
2.3. Notations and Messages
A node can be modelled as a task, an active entity that receives command and transmits data. In this paper, we assume that each node has only one task. Thus, task and node are used interchangeably. A task belongs to a specific task class based on its data transmission interval (TI) such that for a frame with 2
N uplink slots, where
N is defined as a frame factor (
N ≥ 0), a task belongs to class
c (0 ≤
c ≤
N) if it transmits one data per
TI = 2
N/2
c. This implies that a task of class
c has a slot demand (
SD) of 2
c slots and transmits 2
c packets during one frame period. Task
x can be expressed by its profile
PF(
x) as follows:
where
x and
class(x) indicate node address and the class of node
x, respectively.
Some notations used in this paper are summarized as follows:
| Notation | Meaning |
| RNL | indicates a registered node list in which every node has registered with a server. |
| P(x) | indicates the parent of node x. |
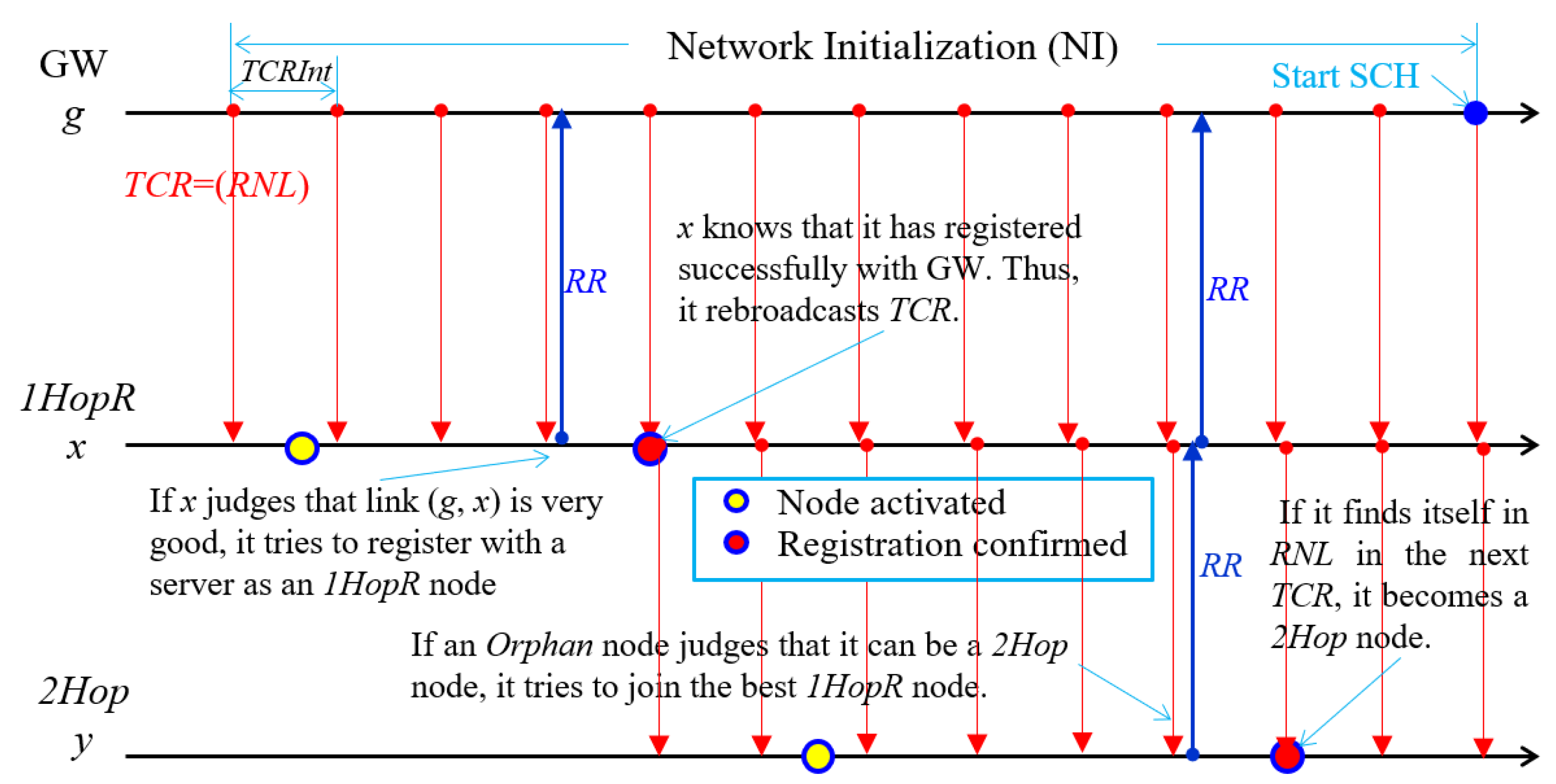
| TCRInt | indicates the interval that GW uses to broadcast a tree construction request (TCR) message during initialization period. |
| MaxChildren | indicates the maximum number of children that a 1-hop relay node can have. |
| uPF(x | indicates the updated profile that node x generates if it detects link breakage to any of its children. |
| uSSI(x) | indicates an updated slot scheduling information that a server generates for node x that has reported uPF(x) |
Some messages used in this paper are summarized as follows:
| Message | Description |
| TCR = (level, RNL) | is a tree construction request (TCR) message that a server broadcasts at the intervals of TCRInt during initialization period and level indicates the tree level of the node that broadcasts this message. |
| RR(x) = (x,P(x),PF(x)) | is the registration request (RR) message that node x sends to its parent P(x) to register with a server. |
2.4. Overview of Slot Scheduling for Two-Hop LoRa Networks
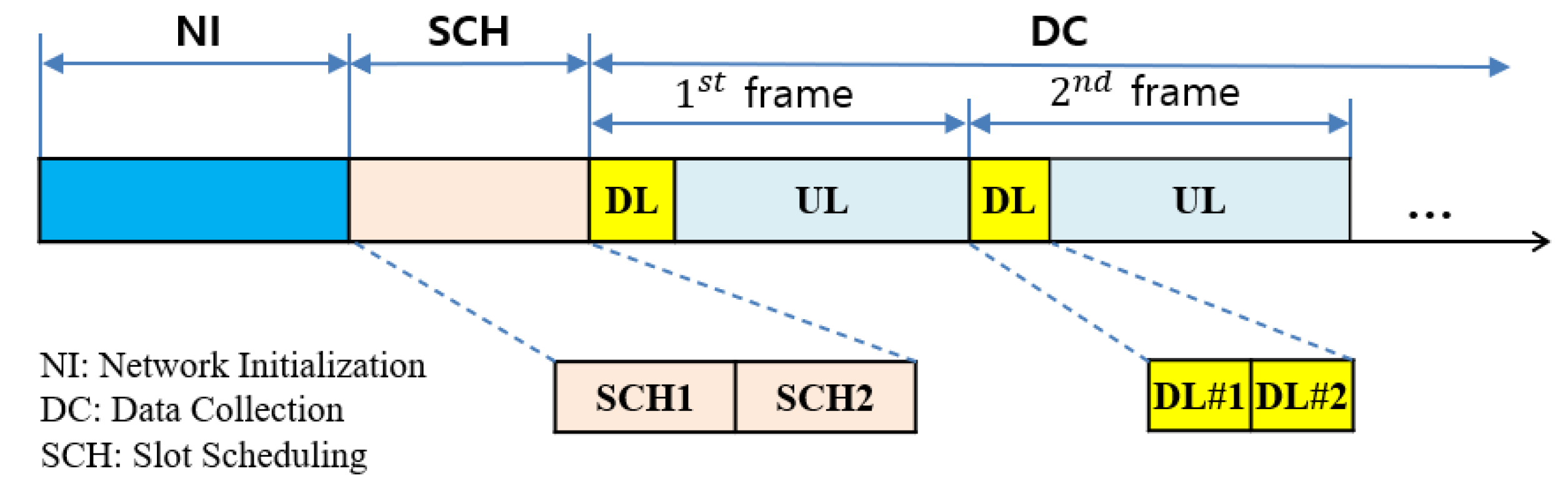
The Two-hop RT-LoRa protocol uses a frame as a data collection cycle that is divided into a downlink (DL) period and an uplink (UL) period that GW uses to broadcast a DL message and end nodes use to send data, respectively. The DL period is further divided into two DL slots: DL#1 for GW to broadcast a DL message and DL#2 for 1-hop relay nodes to rebroadcast the DL message, and the UL period is sliced into 2N data slots.
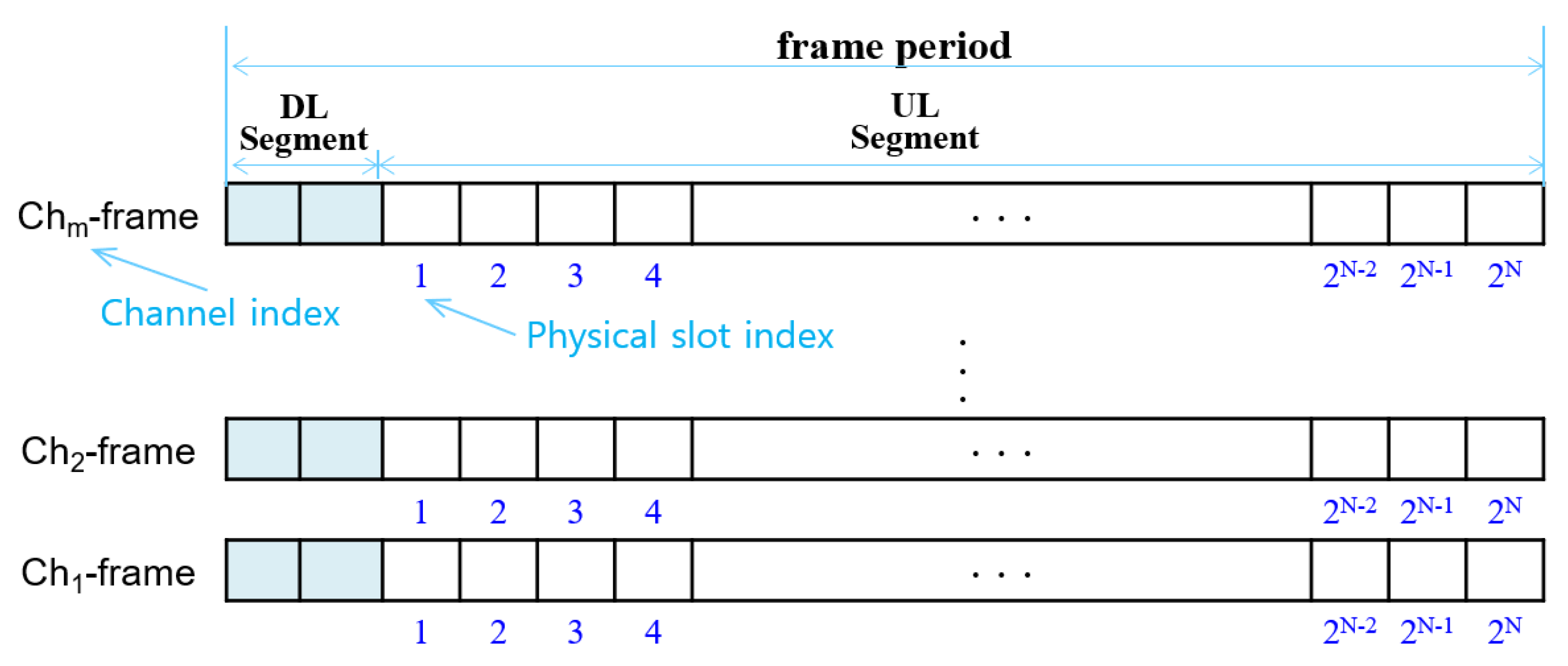
Given a set of tasks, the protocol performs slot scheduling by relying on the
logical slot indexing (LSI) algorithm [
13], that assigns a logical slot index to each of 2
N data slots such that if a task of class
c selects 2
c logical slots sequentially starting with any logical slot index and transmits data in each logical slot, it can meet the transmission period of 2
N/2c. The logical slot indices for 16 data slots are given in
Figure 3a.
For slot scheduling, every node is required to report its profile to a server. A 1-hop relay collects the profiles of its children and merges them with its own task profile before reporting. Suppose that a network has a list of
k 1-hop nodes as (
n1,
n2, …,
ni, …,
nk). Then, the integrated profile
PF(
ni) is expressed as follows:
where
PF(
nij) indicates the profile of the
jth child of node
ni, and
ci is the number of
ni’s children. Let
SD(
x) and
TSD(
x) denote the slot demand of node
x and the total slot demand of
x and
x’s children, respectively. Then,
TSD(
ni) is expressed as follows:
where
and
since 2-hop node needs twice as many slots as it demands. Then, every 1-hop node
ni reports
PF(
ni) to a server so that the server can manage the task profile (
PF) for all nodes in the network as follows:
If tasks are scheduled in the order of the elements in
PF, the start logical slot index of node
ni,
startLSI(
ni), in slot schedule is calculated as follows:
A sever calculates
total slot demands for all 1-hop nodes according to (3), and distributes the
network slot scheduling information (
NSSI) using a DL message:
Upon receiving
NSSI, every 1-hop node
x gets its
startLSI(
x) according to (5) and generates a
local slot schedule,
LSS(
x), using Algorithm 1 with
startLSI(
x) and
TSD(
x). The
LSS(
x) consists of its
receiving slots,
RxSlots(
x), used to receive data from its children and its
transmitting slots, TxSlots(
x), used to transmit its own data and relay data received from its children.
| Algorithm 1. Slot scheduling of 1-hop relay node |
1: At node x that receives NSSI:
2: calculates startLSI(x) using (5);
3: Alloc(x) = a list of SD(x) sequential logical slot numbers starting with startLSI(x) according to the LSI algorithm;
//The ascending sorted list of physical slot numbers corresponding to Alloc(x)
4: TxSlots(x) = ascSort {psi(y)| y ∈ Alloc(x)};
5: startLSI = startLSI(x) + SD(x);
6: RxSlots(x) = { };
7: for each y ∈ CS(x)
8: Alloc(y) = a list of SD(y) sequential logical slot numbers starting with startLSI;
9: psiAlloc(y) = ascSort {psi(v)| v ∈ Alloc(y)}
10: RxSlots(x) = RxSlots(x) ∪ {v| v ∈ psiAlloc(y), v is in odd position};
11: TxSlots(x) = TxSlots(x) ∪ {v| v ∈ psiAlloc(y), v is in even position};
12: startLSI = startLSI + SD(y);
13: endFor |
Furthermore, 1-hop relay node
x generates its
local slot scheduling information,
LSSI(
x), that is required for its children to perform slot scheduling:
where
startLSI =
startLSI(
x) +
SD(
x), and
kx indicates the number of node
x’s children. Then, node
x broadcasts
LSSI(
x), and its child generates a slot schedule that includes
TxSlots using Algorithm 2.
| Algorithm 2. Slot scheduling of 2-hop node |
1: At node xi that receives LSSI(x):
2:
3: get Alloc(xi) starting with startLSI;
4: psiAlloc(xi) = ascSort {psi(v)| v ∈ Alloc(xi)};
5: TxSlots(xi) = {x| x ∈ psiAlloc(xi), x is in odd position}; |
Let us give an example to generate
LSS(
A) in
Figure 1. Suppose that
PF(
A) = (
A, 1, (
B, 1), (
C, 0)) and
startLSI(
A) = 1. Then,
TSD(
A) = 8 and
Alloc(
A) = (1, 2),
Alloc(
B) = (3, 4, 5, 6), and
Alloc(
C) = (7, 8). Then, we get the ascending-sorted physical slot indices: psiAlloc(
A) = (1, 9), psiAlloc(
B) = (3,
5, 11,
13), and psiAlloc(
C) = (7,
15). The underlined numbers in even positions are transmission slot numbers:
TxSlots(
A) = (1, 5, 9, 13, 15), and
RxSlots(
A) = (3, 7, 11) that corresponds to
TxSlots(
B) ∪
TxSlots(
C) from Algorithm 2. The slot schedule is illustrated in
Figure 3b.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}