
ROADS—Rover for Bituminous Pavement Distress Survey: An Unmanned Ground Vehicle (UGV) Prototype for Pavement Distress Evaluation

 ,
,  ,
, 
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area
- ○
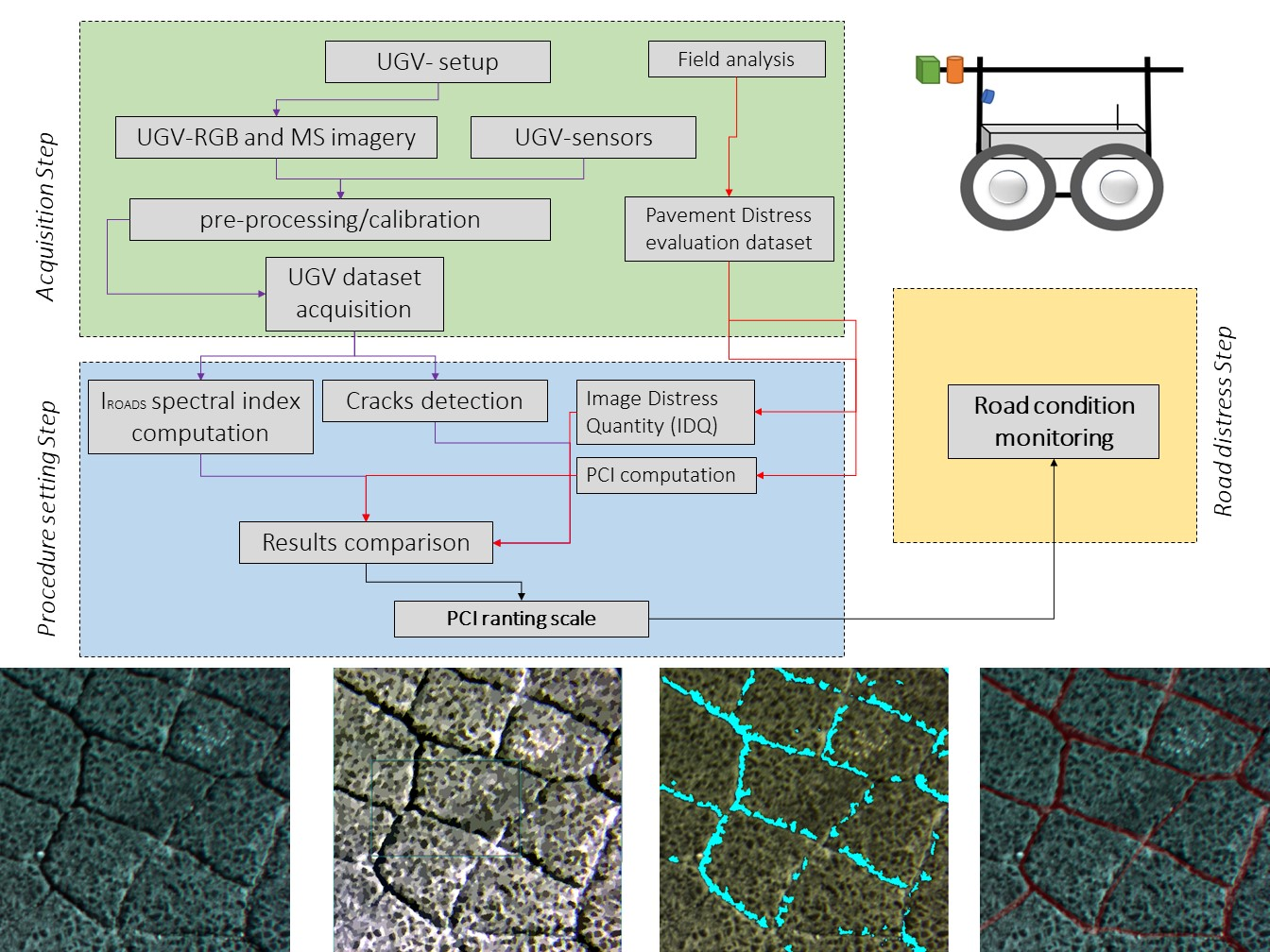
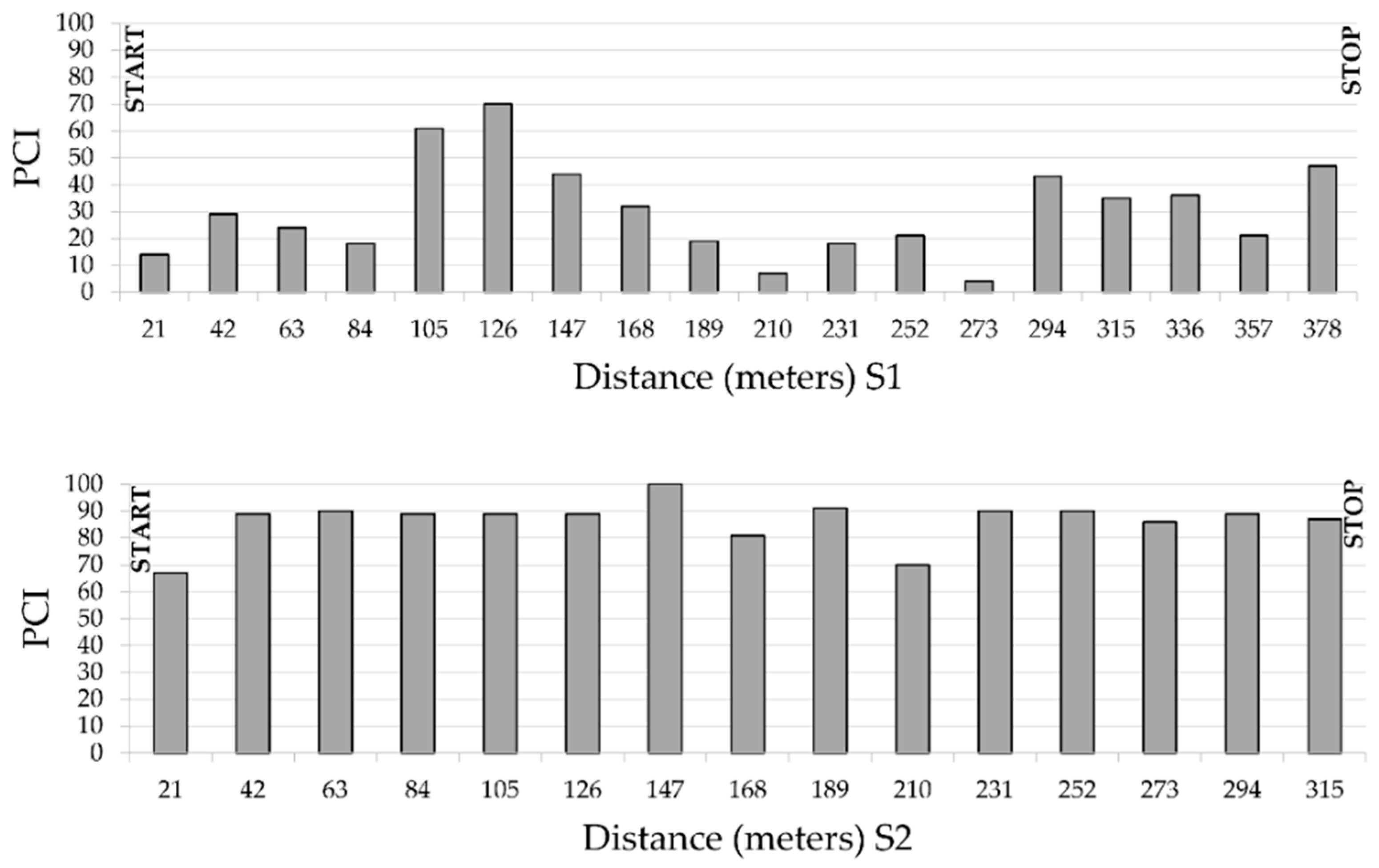
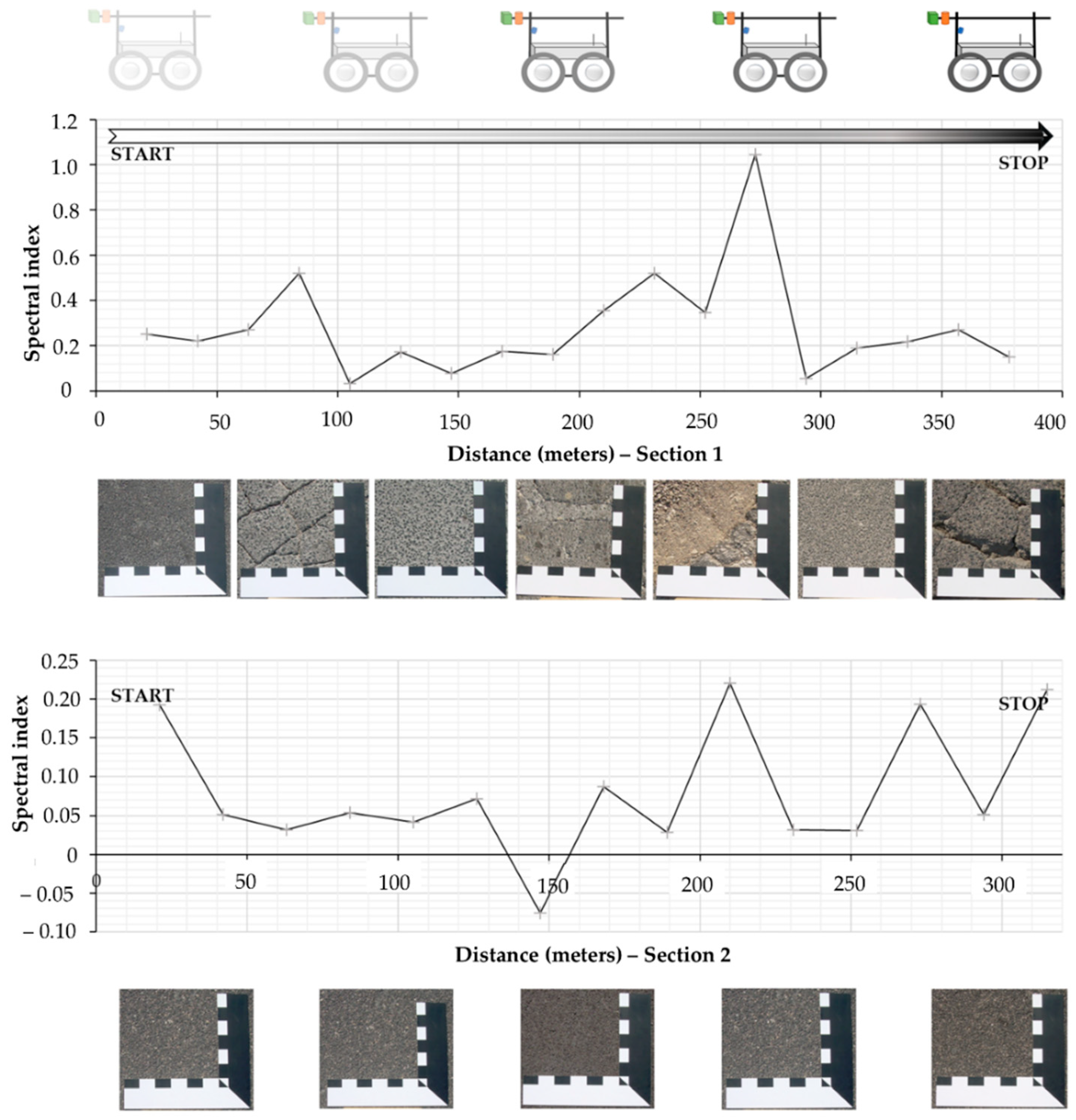
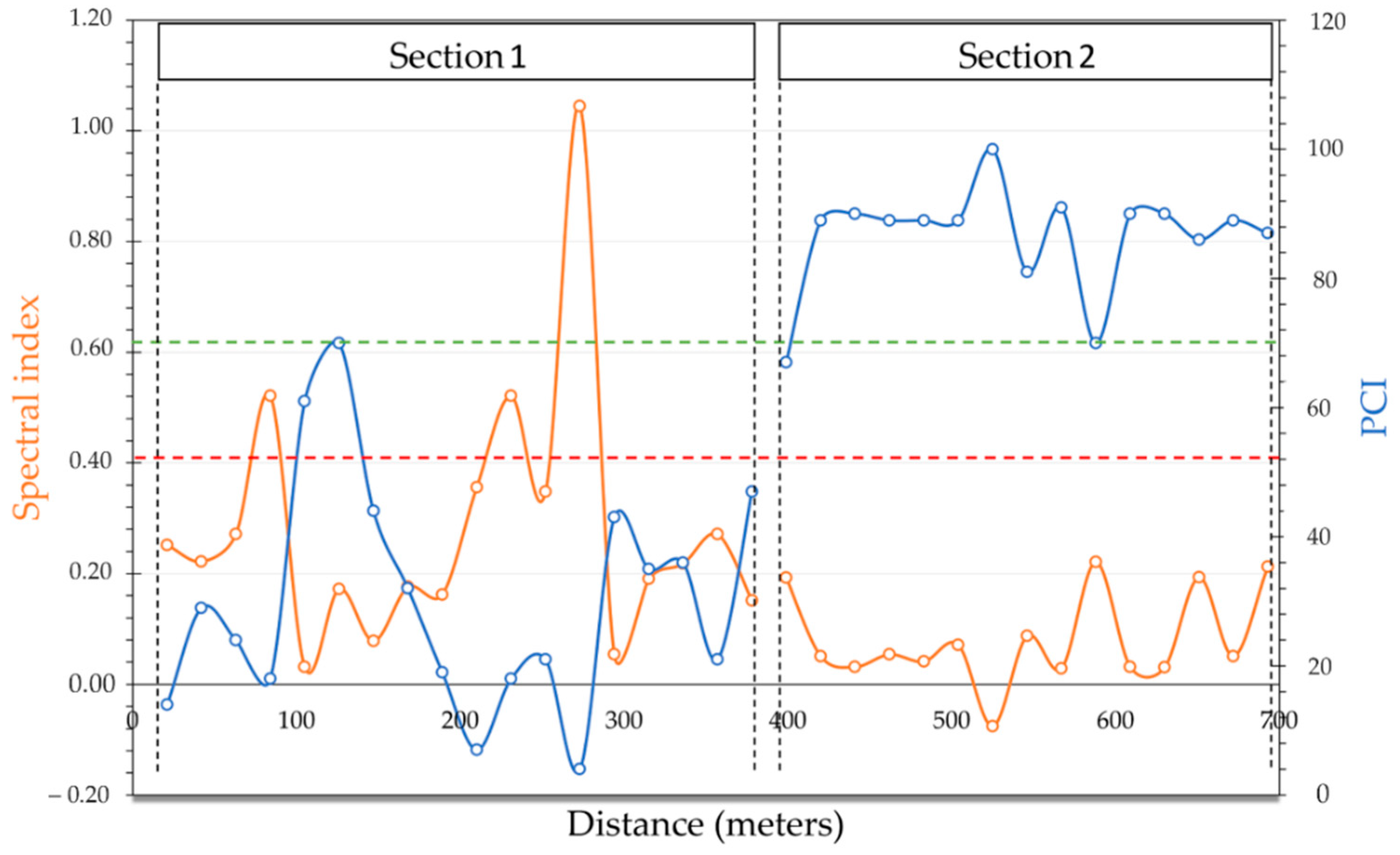
- Section 1 (S1) is 378 m long, the last rehabilitation occurred before 2010 and shows high distress heterogeneity. The road segment is linked to the main parking area of the train station and regional bus terminal: heavy and light traffic flows cause different and pervasive defects in this road section. Raveling and polished aggregates, alligator cracking, patches and potholes are the most apparent distresses.
- ○
- Section 2 (S2), 315 m long, is in very good condition due to the recent asphalt concrete replacement.
2.2. Pavement Distress Evaluation
- Definition of distress percent density (d%) of each type of distress at each severity level j:
- 2.
- Calculation of the Deduct Value (DV) for each distress i, at a severity level j, is:
- 3.
- Calculation of the Total Deduct Value (TDV) by adding all the partial deduct values as:
- 4.
- The correct deduct value (CDV) is defined by correcting the TDV by means of ad hoc functions provided by the ASTM standard, to consider the dependency of some distresses on each other.
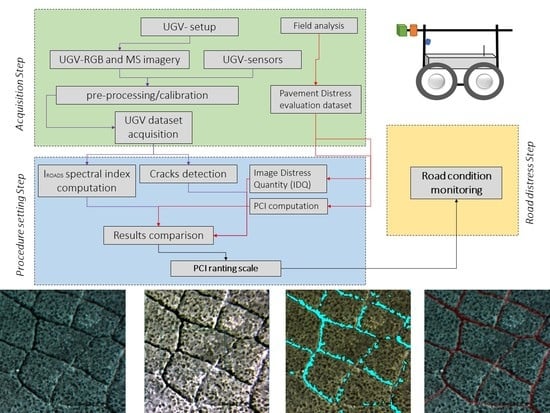
2.3. Unmanned Ground Vehicle

2.4. Sensors Setup
2.5. Image Computing Criteria
3. Results
3.1. Pavement Condition Index Computation
3.2. Image Computation
3.2.1. RGB Images Computation
3.2.2. Multispectral Computing
4. Discussion and Conclusions
- -
- An improvement of the automated distress categorization method can be reached by using UGVs. Such platforms aid in ameliorating the repeatability of measurements and to assess new experiments in relevant environments without higher costs.
- -
- There is the need to maximize data extraction from optical devices which already exist on Pavement Management Systems.
- -
- Focusing on the development of the newest platforms, such systems should be able to collect multilayer datasets and attach to different kinds of vehicles. Moreover, specific algorithms need to be developed to manage and transform pavement condition indices in semi-real time.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Schnebele, E.; Tanyu, B.F.; Cervone, G.; Waters, N.M. Review of remote sensing methodologies for pavement management and assessment. Eur. Transp. Res. Rev. 2015, 7, 7. [Google Scholar] [CrossRef] [Green Version]
- Ragnoli, A.; de Blasiis, M.R.; di Benedetto, A. Pavement Distress Detection Methods: A Review. Infrastructures 2018, 3, 58. [Google Scholar] [CrossRef] [Green Version]
- Mei, A.; Manzo, C.; Bassani, C.; Salvatori, R.; Allegrini, A. Bitumen Removal Determination on Asphalt Pavement Using Digital Imaging Processing and Spectral Analysis. Open J. Appl. Sci. 2014, 4, 366–374. [Google Scholar] [CrossRef] [Green Version]
- Zou, Q.; Cao, Y.; Li, Q.; Mao, Q.; Wang, S. CrackTree: Automatic crack detection from pavement images. Pattern Recognit. Lett. 2012, 33, 227–238. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P. Automatic Road Crack Detection and Characterization. IEEE Trans. Intell. Transp. Syst. 2013, 14, 155–168. [Google Scholar] [CrossRef]
- Fernández, A.C.; Rodríguez-Lozano, F.J.; Villatoro, R.; Olivares, J.; Palomares, J.M. Efficient pavement crack detection and classification. EURASIP J. Image Video Process. 2017, 2017, 39. [Google Scholar] [CrossRef]
- Mathavan, S.; Rahman, M.; Kamal, K. Use of a Self-Organizing Map for Crack Detection in Highly Textured Pavement Images. J. Infrastruct. Syst. 2015, 21, 04014052. [Google Scholar] [CrossRef]
- Mathavan, S.; Rahman, M.M.; Stonecliffe-Jones, M.; Kamal, K. Pavement Raveling Detection and Measurement from Synchronized Intensity and Range Images. Transp. Res. Rec. J. Transp. Res. Board 2014, 2457, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Källén, H.; Heyden, A.; Åström, K.; Lindh, P. Measuring and evaluating bitumen coverage of stones using two different digital image analysis methods. Measurement 2016, 84, 56–67. [Google Scholar] [CrossRef]
- Lantieri, C.; Lamperti, R.; Simone, A.; Vignali, V.; Sangiorgi, C.; Dondi, G.; Magnani, M. Use of image analysis for the eval-uation of rolling bottle tests results. Int. J. Pavement Res. Technol. 2017, 10, 45–53. [Google Scholar] [CrossRef]
- Caputo, P.; Miriello, D.; Bloise, A.; Baldino, N.; Mileti, O.; Ranieri, G.A. A comparison and correlation between bitumen ad-hesion evaluation test methods, boiling and contact angle tests. Int. J. Adhes. Adhes. 2020, 102, 102680. [Google Scholar] [CrossRef]
- Mohan, A.; Poobal, S. Crack detection using image processing: A critical review and analysis. Alex. Eng. J. 2018, 57, 787–798. [Google Scholar] [CrossRef]
- Zakeri, H.; Nejad, F.M.; Fahimifar, A. Image Based Techniques for Crack Detection, Classification and Quantification in Asphalt Pavement: A Review. Arch. Comput. Methods Eng. 2017, 24, 935–977. [Google Scholar] [CrossRef]
- Fan, Z.; Li, C.; Chen, Y.; Mascio, P.D.; Chen, X.; Zhu, G.; Loprencipe, G. Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement. Coatings 2020, 10, 152. [Google Scholar] [CrossRef] [Green Version]
- Fan, Z.; Li, C.; Chen, Y.; Wei, J.; Loprencipe, G.; Chen, X.; di Mascio, P. Automatic Crack Detection on Road Pavements Using Encoder-Decoder Architecture. Materials 2020, 13, 2960. [Google Scholar] [CrossRef] [PubMed]
- Gomez, R.B. Hyperspectral imaging: A useful technology for transportation analysis. Opt. Eng. 2002, 41, 2137–2143. [Google Scholar] [CrossRef]
- Mettas, C.; Agapiou, A.; Themistocleous, K.; Neocleous, K.; Hadjimitsis, D.; Michaelides, S. Risk provision using field spec-troscopy to identify spectral regions for the detection of defects in flexible pavements. Nat. Hazards 2016, 83, 83–96. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, X.; Tian, J.; Jin, X.; Luo, L.; Yang, K. Mapping asphalt pavement aging and condition using multiple endmember spectral mixture analysis in Beijing, China. J. Appl. Remote Sens. 2017, 11, 016003. [Google Scholar] [CrossRef]
- Herold, M.; Roberts, D.; Noronha, V.; Smadi, O. Imaging spectrometry and asphalt road surveys. Transp. Res. Part C Emerg. Technol. 2008, 16, 153–166. [Google Scholar] [CrossRef]
- Carmon, N.; Ben-Dor, E. Mapping Asphaltic Roads’ Skid Resistance Using Imaging Spectroscopy. Remote Sens. 2018, 10, 430. [Google Scholar] [CrossRef] [Green Version]
- Mei, A.; Salvatori, R.; Fiore, N.; Allegrini, A.; D’Andrea, A. Integration of field and laboratory spectral data with mul-ti-resolution remote sensed imagery for asphalt surface differentiation. Remote Sens. 2014, 6, 2765–2781. [Google Scholar] [CrossRef] [Green Version]
- Small, C. High spatial resolution spectral mixture analysis of urban reflectance. Remote Sens. Environ. 2003, 88, 170–186. [Google Scholar] [CrossRef]
- Cronin, J.E.; Taylor, B.S.; Petrow, W.; Limoge, E.J.; Garland, S.D. System and Method for Sensing and Managing Pothole Location and Pothole Characteristics. U.S. Patent 9,416,499, 16 August 2016. [Google Scholar]
- Petkova, M. Deploying Drones for Autonomous Detection of Pavement Distress. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. [Google Scholar]
- Zhang, C. Monitoring the Condition of Unpaved Roads with Remote Sensing and Other Technology; Final Report for US DOT DTPH56-06-BAA-0002; South Dakota State University: Brookings, SD, USA, 2009. [Google Scholar]
- Lin, Y.; Hyyppä, J.; Jaakkola, A. Mini-UAV-borne LIDAR for fine-scale mapping. IEEE Geosci. Remote Sens. Lett. 2010, 8, 426–430. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, X.; Cervone, G.; Yang, L. Detection of Asphalt Pavement Potholes and Cracks Based on the Unmanned Aerial Vehicle Multispectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3701–3712. [Google Scholar] [CrossRef]
- Branco, L.H.C.; Segantine, P.C.L. MaNIAC-UAV—A methodology for automatic pavement defects detection using images obtained by Unmanned Aerial Vehicles. J. Phys. Conf. Ser. 2015, 633, 012122. [Google Scholar] [CrossRef]
- Saad, A.M.; Tahar, K.N. Identification of Rut and Pothole by using Multirotor Unmanned Aerial Vehicle (UAV). Measurement 2019, 137, 647–654. [Google Scholar] [CrossRef]
- Brooks, C.; Dobson, R.; Banach, D.; Oommen, T.; Zhang, K.; Mukherjee, A.; Marion, N. Implementation of Unmanned Aerial Vehicles (UAVs) for Assessment of Transportation Infrastructure: Phase II (No. SPR-1674); Michigan Technological University: Houghton, MI, USA, 2018. [Google Scholar]
- Zhang, S.; Lippitt, C.D.; Bogus, S.M.; Neville, P.R.H. Characterizing Pavement Surface Distress Conditions with Hyper-Spatial Resolution Natural Color Aerial Photography. Remote Sens. 2016, 8, 392. [Google Scholar] [CrossRef] [Green Version]
- Chambon, S.; Moliard, J.-M. Automatic Road Pavement Assessment with Image Processing: Review and Comparison. Int. J. Geophys. 2011, 2011, 989354. [Google Scholar] [CrossRef] [Green Version]
- Puente, I.; Solla, M.; González-Jorge, H.; Arias, P. Validation of mobile LiDAR surveying for measuring pavement layer thicknesses and volumes. NDT E Int. 2013, 60, 70–76. [Google Scholar] [CrossRef]
- Moreno, F.-A.; Gonzalez-Jimenez, J.; Blanco, J.-L.; Esteban, A. An Instrumented Vehicle for Efficient and Accurate 3D Mapping of Roads. Comput. Civ. Infrastruct. Eng. 2013, 28, 403–419. [Google Scholar] [CrossRef]
- Li, Q.; Yao, M.; Yao, X.; Xu, B. A real-time 3D scanning system for pavement distortion inspection. Meas. Sci. Technol. 2009, 21, 015702. [Google Scholar] [CrossRef]
- Sairam, N.; Nagarajan, S.; Ornitz, S. Development of Mobile Mapping System for 3D Road Asset Inventory. Sensors 2016, 16, 367. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Premachandra, C.; Premachandra, H.W.H.; Parape, C.D.; Kawanaka, H. Road crack detection using color variance distri-bution and discriminant analysis for approaching smooth vehicle movement on non-smoothroads. Int. J. Mach. Learn. Cybern. 2015, 6, 545–553. [Google Scholar] [CrossRef]
- Han, Y.; Tu, S.; Yang, Y.; Lei, K.; Liu, C. Pavement Damage Crack Recognition Method Based on High-Resolution Linear Array Cameras and Adaptive Lifting Algorithm. Preprints 2018, 2018020102. [Google Scholar] [CrossRef]
- Angreni, I.A.A.; Adisasmita, S.A.; Ramli, M.I.; Hamid, S. Evaluating the Road Damage of Flexible Pavement Using Digital Image. Int. J. Integr. Eng. 2018, 10, 24–27. [Google Scholar] [CrossRef]
- Li, S.; Yuan, C.; Liu, D.; Cai, H. Integrated Processing of Image and GPR Data for Automated Pothole Detection. J. Comput. Civ. Eng. 2016, 30, 04016015. [Google Scholar] [CrossRef]
- Marecos, V.; Fontul, S.; Solla, M.; de Lurdes Antunes, M. Evaluation of the feasibility of Common Mid-Point approach for air-coupled GPR applied to road pavement assessment. Measurement 2018, 128, 295–305. [Google Scholar] [CrossRef]
- Núñez-Nieto, X.; Solla, M.; Marecos, V.; Lorenzo, H. Applications of the GPR method for road inspection. Non-Destr. Tech. Eval. Struct. Infrastruct. 2016, 11, 213. [Google Scholar]
- Saarenketo, T.; Scullion, T. Road evaluation with ground penetrating radar. J. Appl. Geophys. 2000, 43, 119–138. [Google Scholar] [CrossRef]
- Maser, K.R. Condition Assessment of Transportation Infrastructure Using Ground-Penetrating Radar. J. Infrastruct. Syst. 1996, 2, 94–101. [Google Scholar] [CrossRef]
- Chang, J.-R.; Tseng, Y.-H.; Kang, S.-C.; Tseng, C.-H.; Wu, P.-H. The Study in Using an Autonomous Robot for Pavement Inspection. In Proceedings of the Automation and Robotics in Construction—Proceedings of the 24th International Symposium on Automation and Robotics in Construction, Kochi, India, 19–21 September 2007; pp. 229–234. [Google Scholar]
- Murthy, S.B.S.; Varaprasad, G. Detection of potholes in autonomous vehicle. IET Intell. Transp. Syst. 2014, 8, 543–549. [Google Scholar] [CrossRef]
- Koch, C.; Brilakis, I. Pothole detection in asphalt pavement images. Adv. Eng. Inform. 2011, 25, 507–515. [Google Scholar] [CrossRef]
- Song, J.H.; Gao, H.W.; Liu, Y.J.; Yu, Y. Road Damage Identification and Degree Assessment based on UGV. Int. J. Smart Sens. Intell. Syst. 2016, 9, 2069–2087. [Google Scholar] [CrossRef] [Green Version]
- Tseng, Y.-H.; Kang, S.-C.; Chang, J.-R.; Lee, C.-H. Strategies for autonomous robots to inspect pavement distresses. Autom. Constr. 2011, 20, 1156–1172. [Google Scholar] [CrossRef]
- Nguyen, T.; Lechner, B.; Wong, Y.D. Response-based methods to measure road surface irregularity: A state-of-the-art review. Eur. Transp. Res. Rev. 2019, 11, 43. [Google Scholar] [CrossRef] [Green Version]
- Basavaraju, A.; Du, J.; Zhou, F.; Ji, J. A Machine Learning Approach to Road Surface Anomaly Assessment Using Smartphone Sensors. IEEE Sens. J. 2019, 20, 2635–2647. [Google Scholar] [CrossRef]
- Gueta, L.B.; Sato, A. Classifying road surface conditions using vibration signals. In Proceedings of the 2017 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Kuala Lumpur, Malaysia, 12–15 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 39–43. [Google Scholar]
- Cafiso, S.; di Graziano, A.; Marchetta, V.; Pappalardo, G. Urban road pavements monitoring and assessment using bike and e-scooter as probe vehicles. Case Stud. Constr. Mater. 2022, 16, e00889. [Google Scholar] [CrossRef]
- Min, K.I.; Oh, J.S.; Kim, B.W. Traffic sign extract and recognition on unmanned vehicle using image pro-cessing based on support vector machine. In Proceedings of the 2011 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011; pp. 750–753. [Google Scholar]
- Moon, H.; Lee, J.; Kim, J.; Lee, D. Development of Unmanned Ground Vehicles Available of Urban Drive. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 786–790. [Google Scholar]
- Liu, Y.; Xu, W.; Dobaie, A.M.; Zhuang, Y. Autonomous road detection and modeling for UGVs using vision-laser data fusion. Neurocomputing 2018, 275, 2752–2761. [Google Scholar] [CrossRef]
- Fauzi, A.A.; Utaminingrum, F.; Ramdani, F. Road surface classification based on LBP and GLCM features using kNN classifier. Bull. Electr. Eng. Inform. 2020, 9, 1446–1453. [Google Scholar] [CrossRef]
- Gavilán, M.; Balcones, D.; Sotelo, M.A.; Llorca, D.F.; Marcos, O.; Fernández, C.; García, I.; Quintero, R. Surface Classification for Road Distress Detection System Enhancement. In Proceedings of the Swarm, Evolutionary, and Memetic Computing, Bhubaneswar, India, 20–22 December 2012; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2012; pp. 600–607. [Google Scholar]
- Slavkovikj, V.; Verstockt, S.; de Neve, W.; Van Hoecke, S.; Van de Walle, R. Image-based road type classification. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 2359–2364. [Google Scholar]
- Marianingsih, S.; Utaminingrum, F.; Bachtiar, F.A. Road surface types classification using combination of K-nearest neighbor and naïve bayes based on GLCM. Int. J. Adv. Soft Comput. Its Appl. 2019, 11, 15–27. [Google Scholar]
- Di Mascio, P.; Antonini, A.; Narciso, P.; Greto, A.; Cipriani, M.; Moretti, L. Proposal and Implementation of a Heliport Pavement Management System: Technical and Economic Comparison of Maintenance Strategies. Sustainability 2021, 13, 9201. [Google Scholar] [CrossRef]
- Corazza, M.V.; di Mascio, P.; Moretti, L. Management of Sidewalk Maintenance to Improve Walking Comfort for Senior Citizens. WIT Trans. Built Environ. 2017, 176, 195–206. [Google Scholar]
- Zampetti, E.; Papa, P.; di Flaviano, F.; Paciucci, L.; Petracchini, F.; Pirrone, N.; Bearzotti, A.; Macagnano, A. Remotely Controlled Terrestrial Vehicle Integrated Sensory System for Environmental Monitoring. In Convegno Nazionale Sensori; Springer: Cham, Switzerland, 2017; pp. 338–343. [Google Scholar]
- Manzo, C.; Mei, A.; Zampetti, E.; Bassani, C.; Paciucci, L.; Manetti, P. Top-down approach from satellite to terrestrial rover application for environmental monitoring of landfills. Sci. Total Environ. 2017, 584, 1333–1348. [Google Scholar] [CrossRef]
- County of Riverside Transportation Department. Pavement Management Report; County of Riverside Transportation Department: Riverside, CA, USA, 2014; Available online: https://www.rctlma.org/Portals/7/documents/Pavement%20Management/Pavement%20Management%20Report%202014_081015.pdf (accessed on 25 February 2022).
- Gautam, S.K.; Prajapati, R.B.; Om, H. Big Data Applications in Transportation Systems Using the Internet of Things. Handb. Res. Big Data 2021, 91, 91–111. [Google Scholar]
- Achary, S.; Agarwal, S.; Das, D.; Yadav, N.; Jain, P. Pothole and Hump detection system using IoT. SAMRIDDHI J. Phys. Sci. Eng. Technol. 2020, 12, 6–12. [Google Scholar]
- Khan, Z.H.; Gulliver, T.A.; Azam, K.; Khattak, K.S. Macroscopic model on driver physiological and psychological behavior at changes in traffic. J. Eng. Appl. Sci. 2019, 38, 1–9. [Google Scholar]
- Li, J.; Yin, G.; Wang, X.; Yan, W. Automated decision making in highway pavement preventive maintenance based on deep learning. Autom. Constr. 2021, 135, 104111. [Google Scholar] [CrossRef]
- Wen, T.; Ding, S.; Lang, H.; Lu, J.J.; Yuan, Y.; Peng, Y.; Chen, J.; Wang, A. Automated pavement distress segmentation on asphalt surfaces using a deep learning network. Int. J. Pavement Eng. 2022, 1–14. [Google Scholar] [CrossRef]
- Hsieh, Y.-A.; Tsai, Y.J. Machine Learning for Crack Detection: Review and Model Performance Comparison. J. Comput. Civ. Eng. 2020, 34, 04020038. [Google Scholar] [CrossRef]
- Praticò, F.G.; Fedele, R.; Naumov, V.; Sauer, T. Detection and Monitoring of Bottom-Up Cracks in Road Pavement Using a Machine-Learning Approach. Algorithms 2020, 13, 81. [Google Scholar] [CrossRef] [Green Version]
- Doğan, S.; Koçak, D.; Atan, M. Financial Distress Prediction Using Support Vector Machines and Logistic Regression. In Contributions to Economics; Springer: Berlin/Heidelberg, Germany, 2022; pp. 429–452. [Google Scholar]
- Hoang, N.-D. An Artificial Intelligence Method for Asphalt Pavement Pothole Detection Using Least Squares Support Vector Machine and Neural Network with Steerable Filter-Based Feature Extraction. Adv. Civ. Eng. 2018, 2018, 7419058. [Google Scholar] [CrossRef] [Green Version]
- Sirhan, M.; Bekhor, S.; Sidess, A. Implementation of Deep Neural Networks for Pavement Condition Index Prediction. J. Transp. Eng. Part B Pavements 2022, 148, 04021070. [Google Scholar] [CrossRef]
- Alsugair, A.M.; Al-Qudrah, A.A. Artificial Neural Network Approach for Pavement Maintenance. J. Comput. Civ. Eng. 1998, 12, 249–255. [Google Scholar] [CrossRef]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using android smartphones with accelerometers. In Proceedings of the International Conference on Distributed Computing in Sensor Systems and Workshops (DCOSS), Barcelona, Spain, 27–29 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Shambhu, H.; Harish, V.; Mekali, G.V. Pothole Detection and Inter vehicular Communication. In Technical Report of Wireless Communications Laboratory; BMS College of Engineering: Bangalore, India, 2019. [Google Scholar]
- Moazzam, I.; Kamal, K.; Mathavan, S.; Usman, S.; Rahman, M. Metrology and visualization of potholes using the microsoft kinect sensor. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 1284–1291. [Google Scholar]
- Chen, K.; Lu, M.; Fan, X.; Wei, M.; Wu, J. Road condition monitoring using on-board Three-axis Accelerometer and GPS Sensor. In Proceedings of the 2011 6th International ICST Conference on Communications and Networking in China (CHINACOM), Harbin, China, 17–19 August 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1032–1037. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 8-Bit Raw Image | 10-Bit Raw Image | 10-Bit DCM |
| 3.0 s | 4.0 s | 7.0 s |
| 3.07 MB | 6.15 MB | 2.3 MB |
| Object distance (m) | Ground resolution (mm per pixel) | FOV (m) |
| 0.5 | 0.2 | 0.41 × 0.31 |
| 0.7 | 0.28 | 0.57 × 0.43 |
| 1 | 0.4 | 0.82 × 0.615 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, A.; Zampetti, E.; Di Mascio, P.; Fontinovo, G.; Papa, P.; D’Andrea, A. ROADS—Rover for Bituminous Pavement Distress Survey: An Unmanned Ground Vehicle (UGV) Prototype for Pavement Distress Evaluation. Sensors 2022, 22, 3414. https://doi.org/10.3390/s22093414
Mei A, Zampetti E, Di Mascio P, Fontinovo G, Papa P, D’Andrea A. ROADS—Rover for Bituminous Pavement Distress Survey: An Unmanned Ground Vehicle (UGV) Prototype for Pavement Distress Evaluation. Sensors. 2022; 22(9):3414. https://doi.org/10.3390/s22093414
Chicago/Turabian StyleMei, Alessandro, Emiliano Zampetti, Paola Di Mascio, Giuliano Fontinovo, Paolo Papa, and Antonio D’Andrea. 2022. "ROADS—Rover for Bituminous Pavement Distress Survey: An Unmanned Ground Vehicle (UGV) Prototype for Pavement Distress Evaluation" Sensors 22, no. 9: 3414. https://doi.org/10.3390/s22093414