
Design of a Highly Sensitive Reduced Graphene Oxide/Graphene Oxide@Cellulose Acetate/Thermoplastic Polyurethane Flexible Sensor


Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
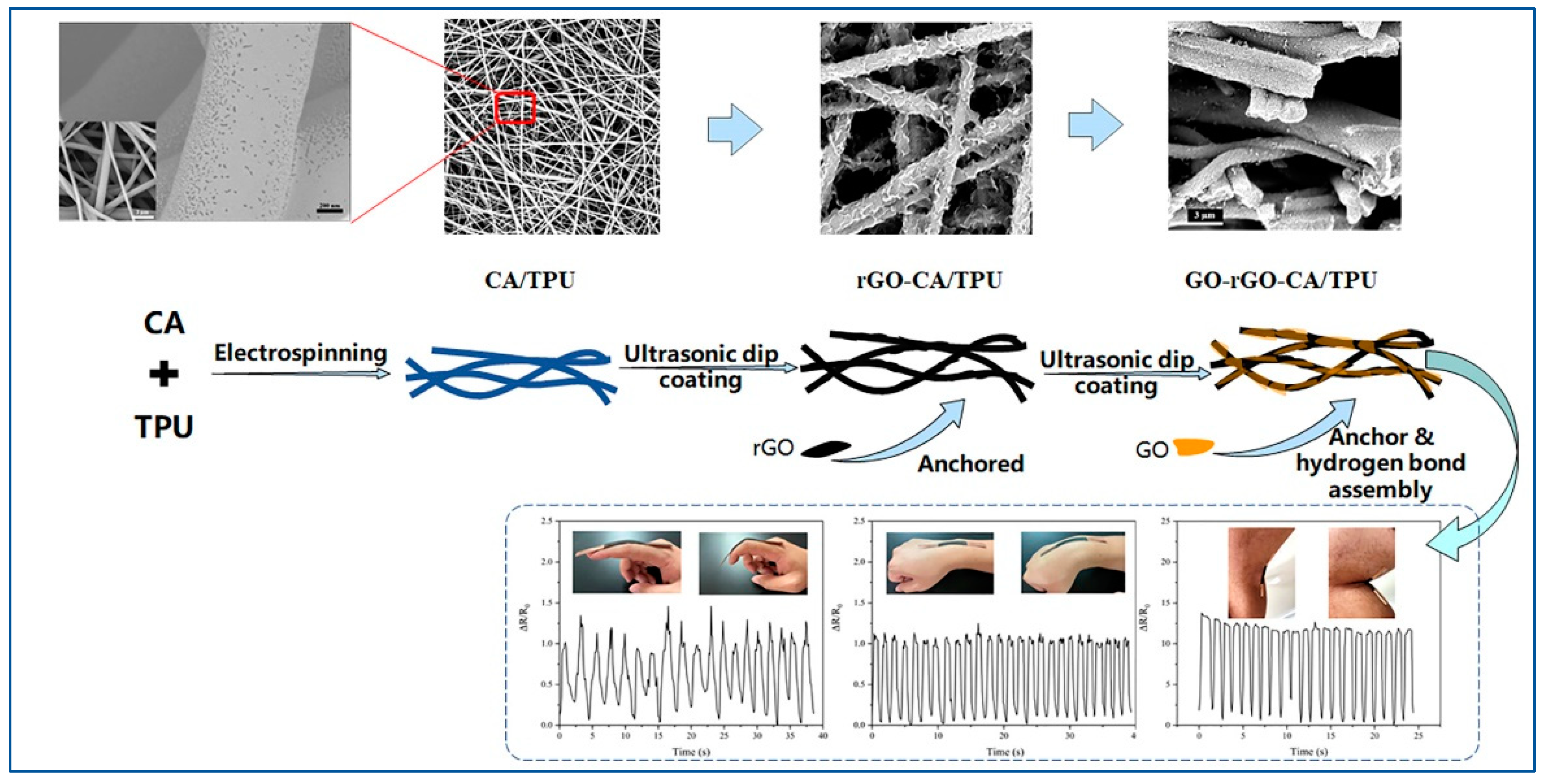
2.2. Preparation of the Flexible Sensor
2.2.1. Preparation of the CA/TPU Composite Film
2.2.2. Preparation of the GO/rGO@CA/TPU Film
2.3. Characterization
2.4. Sensor Sensitivity Measurement
3. Results
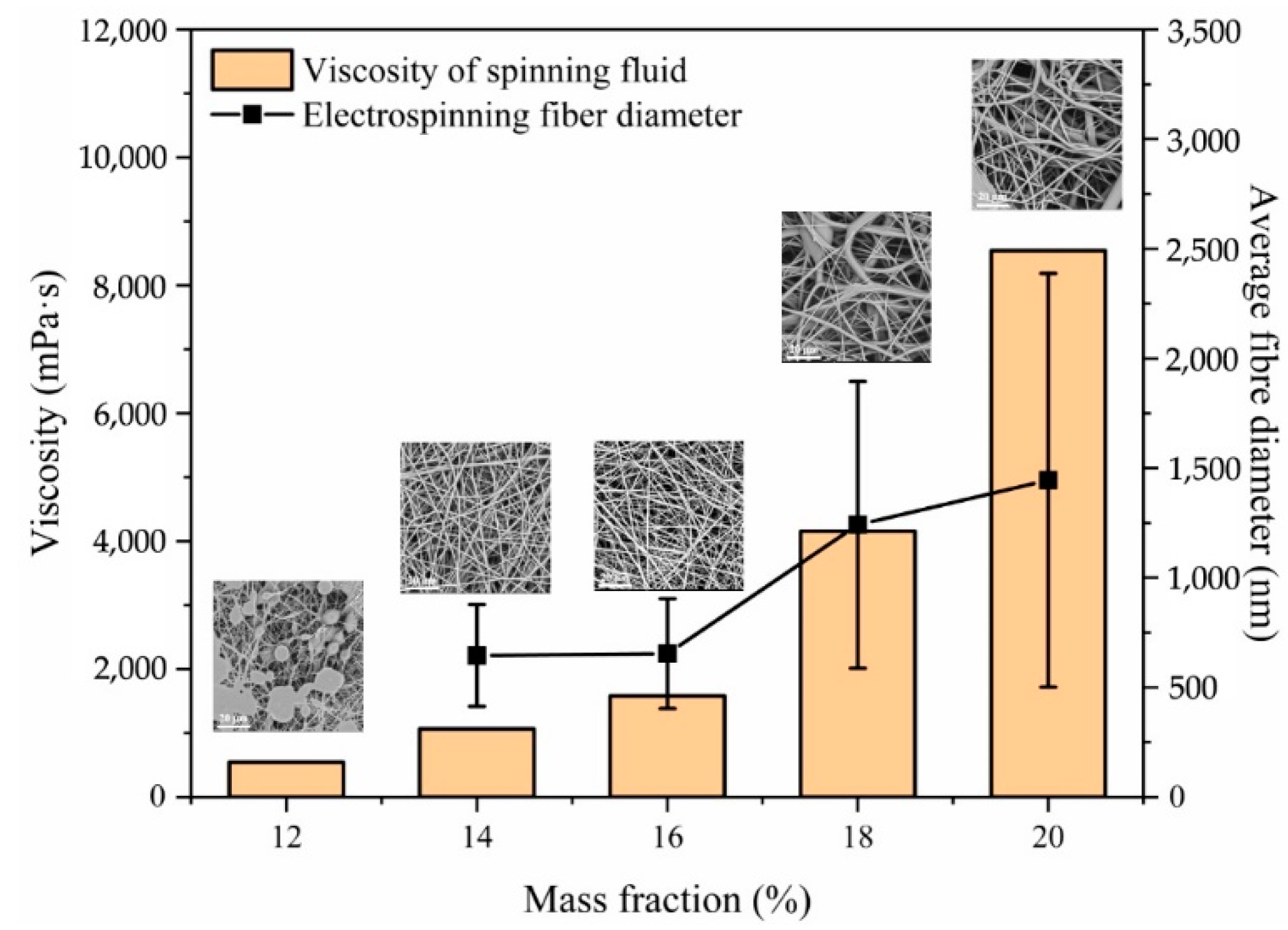
3.1. Electrospinning of the Mixed Solution
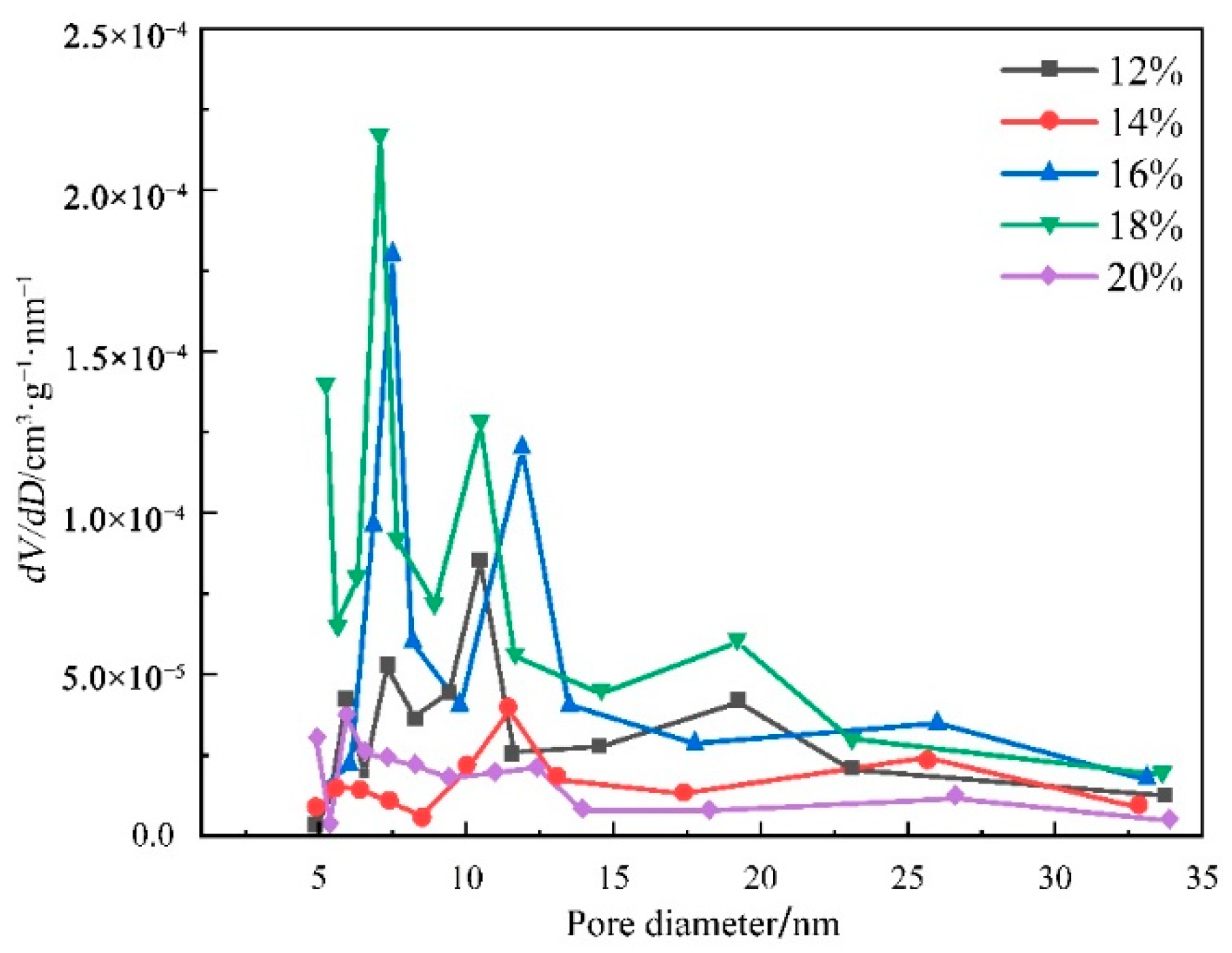
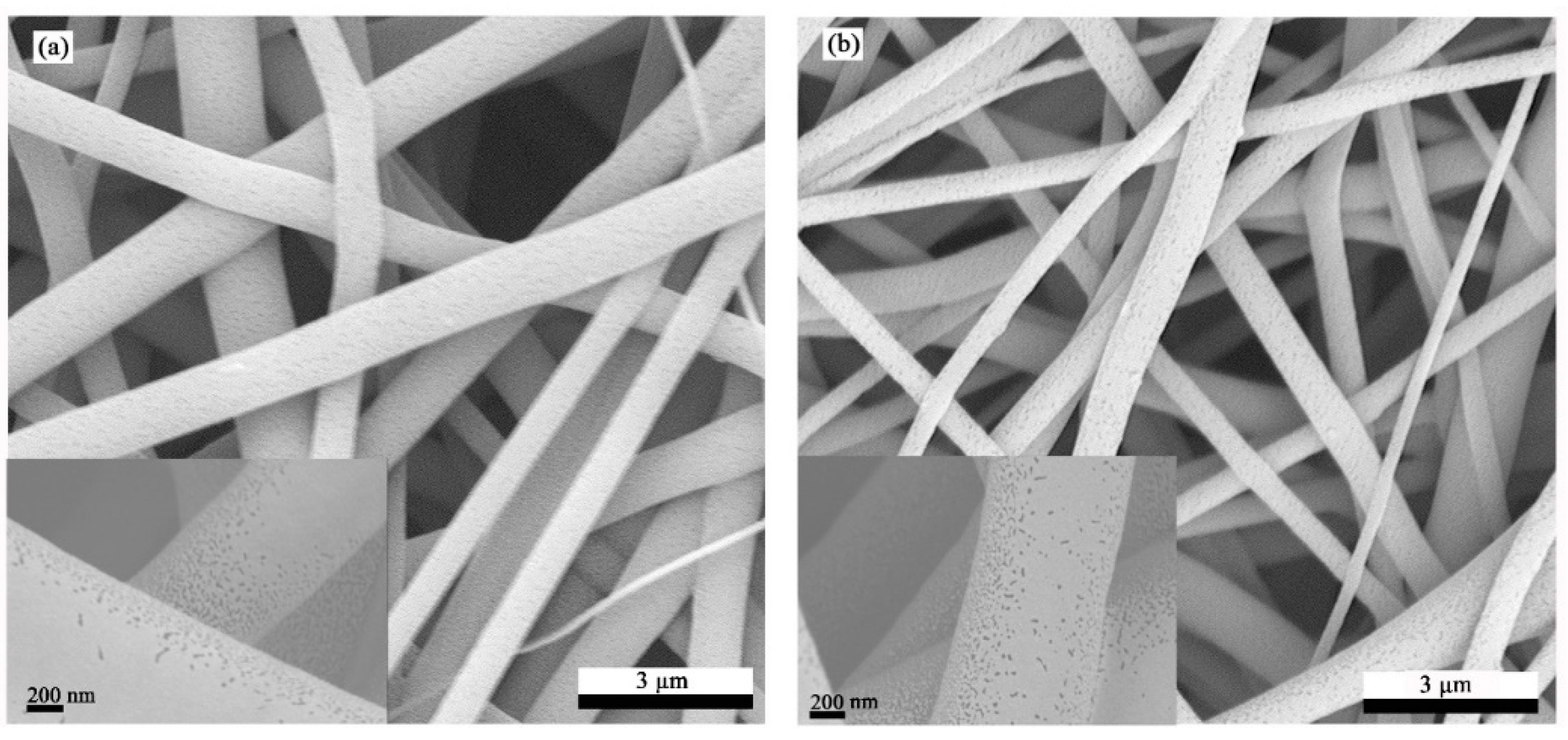
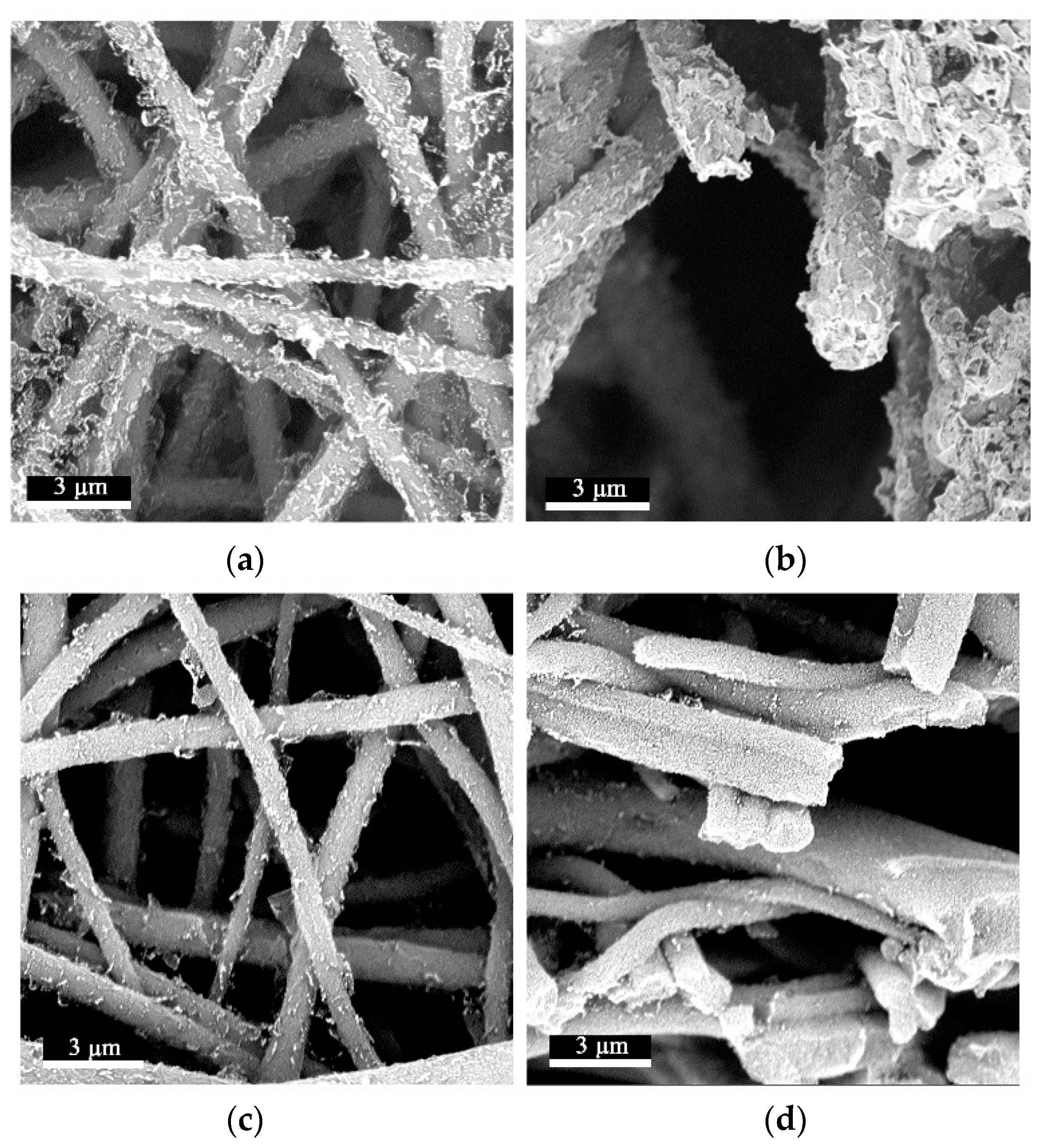
3.2. Analysis of the Pore Size and Morphology of the Electrospun Fibers
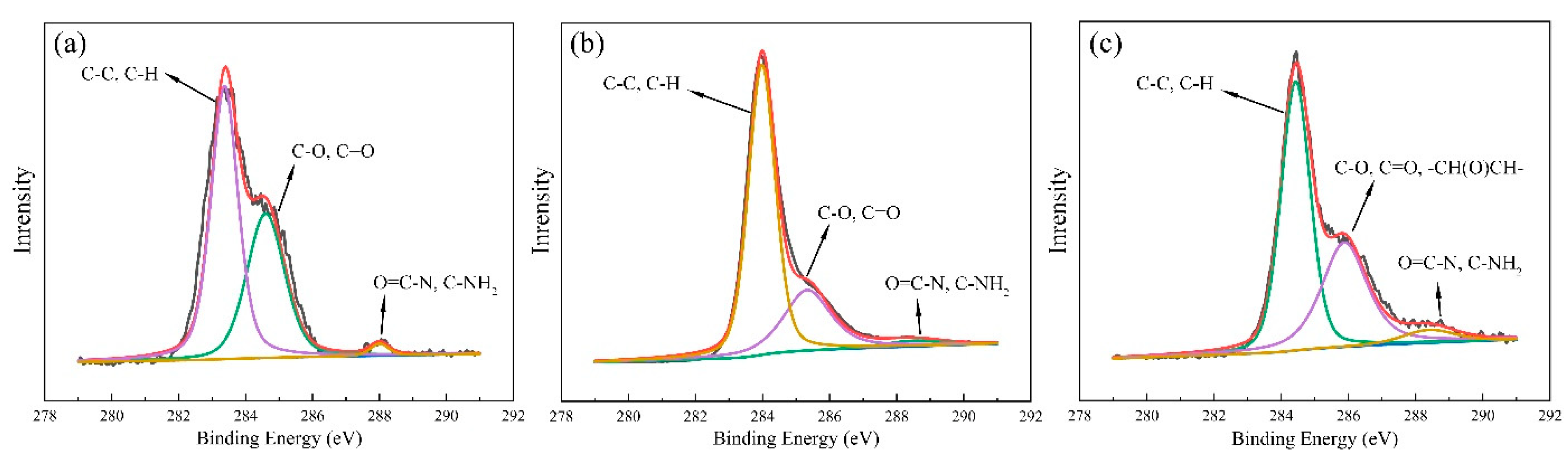
3.3. Characterization of Composite Film
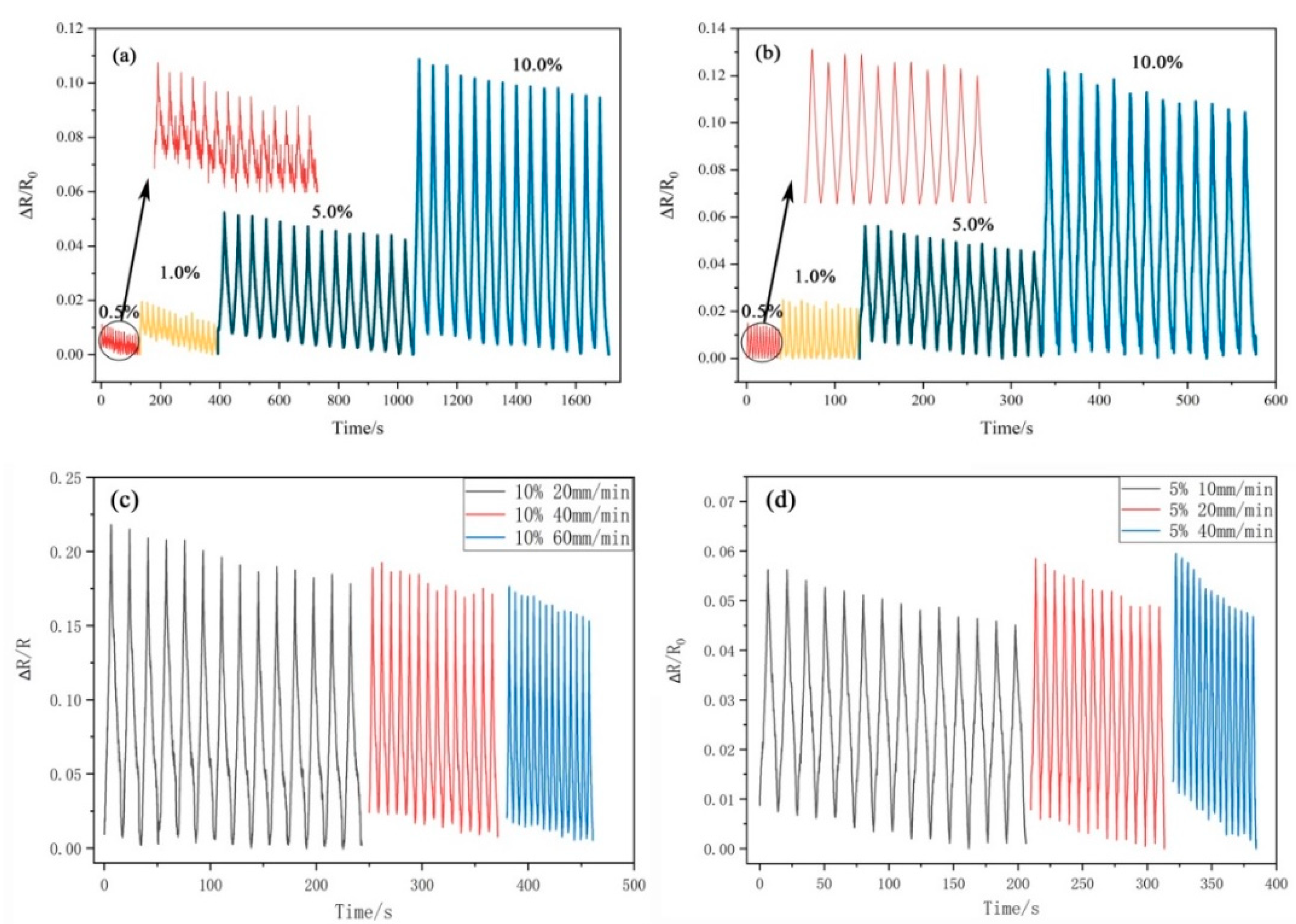
3.4. Strain Response Analysis of the Sensor
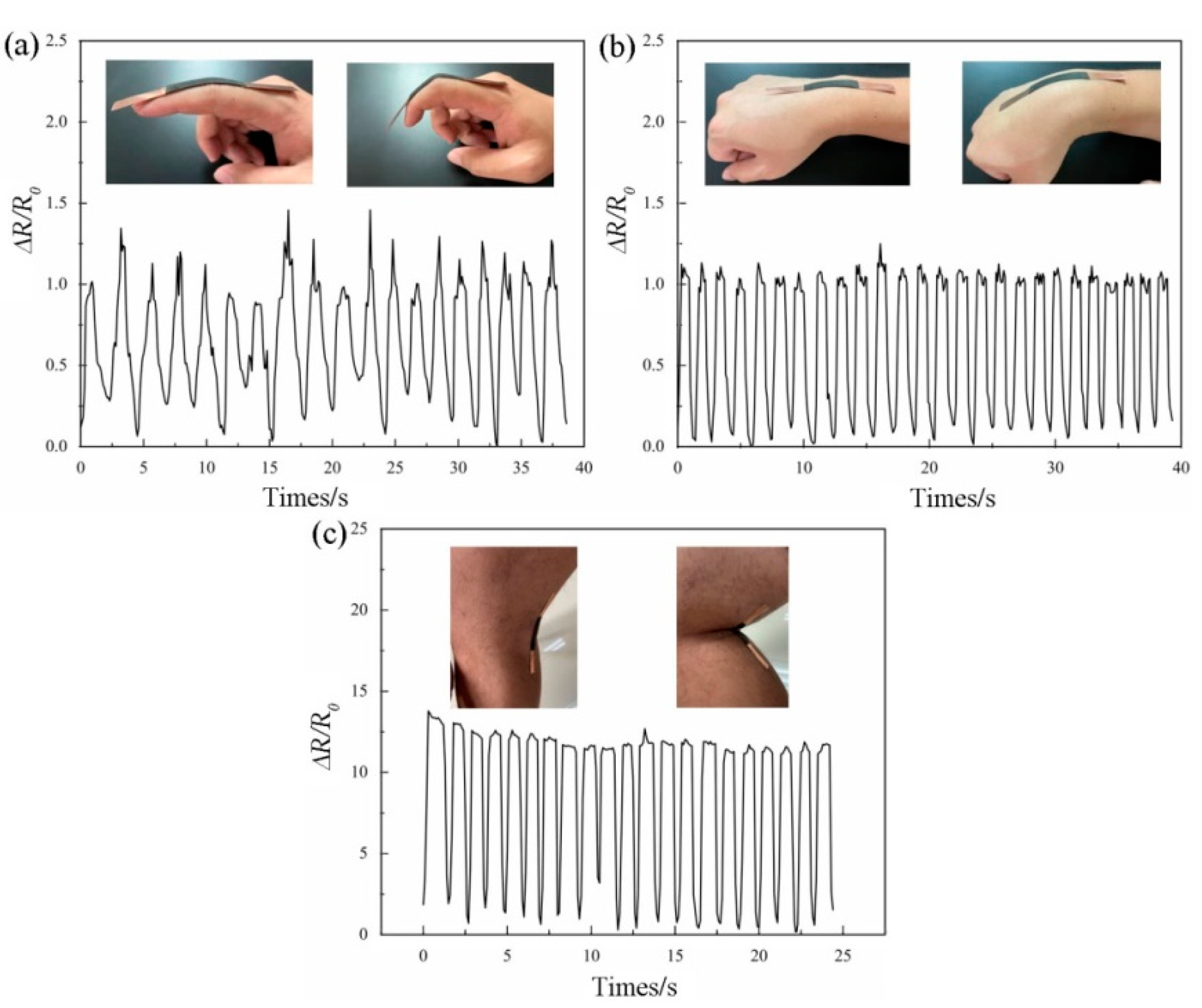
3.5. Human Motion Detection with the Flwxible Sensor
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, S.; Xiao, X.; Hu, J.; Dong, M.; Zhang, Y.; Xu, R.; Wang, X.; Islam, J. Recent Advances of Carbon-Based Flexible Strain Sensors in Physiological Signal Monitoring. ACS Appl. Electron. Mater. 2020, 2, 2282–2300. [Google Scholar] [CrossRef]
- Yoon, J.; Cho, H.Y.; Shin, M.; Choi, H.K.; Lee, T.; Choi, J.W. Flexible Electrochemical Biosensors for Healthcare Monitoring. J. Mater. Chem. B 2020, 8, 7293–7560. [Google Scholar] [CrossRef]
- Segev-Bar, M.; Haick, H. Flexible Sensors Based on Nanoparticles. Acs Nano 2013, 7, 8366–8378. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, K.; Yataka, K.; Okumiya, Y.; Sakakibara, S.; Sako, K.; Mimura, H.; Inoue, Y. Rapid-Response, Widely Stretchable Sensor of Aligned MWCNT/Elastomer Composites for Human Motion Detection. ACS Sens. 2016, 1, 817–825. [Google Scholar] [CrossRef]
- Tamura, R.; Sakaino, S.; Tsuji, T. High Dynamic Range Uniaxial Force/Torque Sensor Using Metal Foil and Semiconductor Strain Gauge. IEEJ J. Ind. Appl. 2021, 10, 506–511. [Google Scholar] [CrossRef]
- Mai, W.; Liang, Z.; Zhang, L.; Yu, X.; Liu, P.; Zhu, H.; Cai, X.; Tan, S. Strain Sensing Mechanism of The Fabricated ZnO Nanowire-polymer Composite Strain Sensors. Chem. Phys. Lett. 2012, 538, 99–101. [Google Scholar] [CrossRef]
- Zeng, X.; Hu, Y. Sensation and Perception of a Bioinspired Flexible Smart Sensor System. Acs Nano 2021, 15, 9238–9243. [Google Scholar] [CrossRef]
- Prunet, G.; Pawula, F.; Fleury, G.; Cloutet, E.; Robinson, A.J.; Hadziioannou, G.; Pakdel, A. A Review on Conductive Polymers and Their Hybrids for Flexible and Wearable Thermoelectric Applications. Mater. Today Phys. 2021, 18, 100402. [Google Scholar] [CrossRef]
- Yoon, J.; Joo, Y.; Oh, E.; Lee, B.; Kim, D.; Lee, S.; Kim, T.; Byun, J.; Hong, Y. Soft Modular Electronic Blocks SMEBs A Strategy for Tailored Wearable Health-Monitoring Systems. Adv. Sci. 2019, 6, 1801682. [Google Scholar] [CrossRef] [Green Version]
- Sun, K.; Ko, H.; Park, H.H.; Seong, M.; Lee, S.H.; Yi, H.; Park, H.W.; Kim, T.I.; Pang, C.; Jeong, H.E. Hybrid Architectures of Heterogeneous Carbon Nanotube Composite Microstructures Enable Multiaxial Strain Perception with High Sensitivity and Ultrabroad Sensing Range. Small 2018, 14, 1803411. [Google Scholar] [CrossRef]
- Sun, Q.J.; Zhao, X.H.; Zhou, Y.; Yeung, C.C.; Wu, W.; Venkatesh, S.; Xu, Z.X.; Wylie, J.J.; Li, W.J.; Roy, V.A.L. Fingertip-Skin-Inspired Highly Sensitive and Multifunctional Sensor with Hierarchically Structured Conductive Graphite/Polydimethylsiloxane Foams. Adv. Funct. Mater. 2019, 29, 1808829. [Google Scholar] [CrossRef]
- Trung, T.Q.; Duy, L.T.; Ramasundaram, S.; Lee, N.E. Transparent, Stretchable, and Rapid-response Humidity Sensor for Body-attachable Wearable Electronics. Nano Res. 2017, 10, 2021–2033. [Google Scholar] [CrossRef]
- Tang, J.; Wu, Y.; Ma, S.; Yan, T.; Pan, Z. Flexible Strain Sensor Based on CNT/TPU Composite Nanofiber Yarn for Smart Sports Bandage. Compos. Part B Eng. 2022, 232, 109605. [Google Scholar] [CrossRef]
- Gao, W.C.; Wu, W.; Chen, C.Z.; Zhao, H.; Liu, Y.; Li, Q.; Huang, C.X.; Hu, G.H.; Wang, S.F.; Shi, D. Design of a Superhydrophobic Strain Sensor with a Multilayer Structure for Human Motion Monitoring. ACS Appl. Mater. Interfaces 2021, 14, 1874–1884. [Google Scholar] [CrossRef]
- Zhou, Q.; Chen, T.J.; Cao, S.J.; Xia, X.; Bi, Y.; Xiao, X.L. A Novel Flexible Piezoresistive Pressure Sensor Based on PVDF/PVA-CNTs Electrospun Composite Film. Appl. Phys. A 2021, 127, 1–10. [Google Scholar] [CrossRef]
- Casper, C.L.; Stephens, J.S.; Tassi, N.G.; Chase, D.B.; Rabolt, J.F. Controlling Surface Morphology of Electrospun Polystyrene Fibers: Effect of Humidity and Molecular Weight in The Electrospinning process. Macromolecules 2004, 37, 573–578. [Google Scholar] [CrossRef]
- Xue, J.; Wu, T.; Dai, Y.; Xia, Y. Electrospinning and Electrospun Nanofibers: Methods, Materials, and Applications. Chem. Rev. 2019, 119, 5298–5415. [Google Scholar] [CrossRef]
- Tan, N.L.; Park, S. Wearable Strain Sensor for Human Motion Detection Based on Ligand-exchanged Gold Nanoparticles. J. Ind. Eng. Chem. 2019, 82, 122–129. [Google Scholar] [CrossRef]
- Hsu, P.C.; Kong, D.; Wang, S.; Wang, H.; Welch, A.J.; Wu, H.; Cui, Y. Electrolessly Deposited Electrospun Metal Nanowire Transparent Electrodes. J. Am. Chem. Soc. 2014, 136, 10593–10596. [Google Scholar] [CrossRef]
- Li, S.M.; Li, R.Q.; Gonzalez, O.G.; Chen, T.J.; Xiao, X.L. Highly Sensitive and Flexible Piezoresistive Sensor Based on c-MWCNTs Decorated TPU Electrospun Fibrous Network for Human Motion Detection. Compos. Sci. Technol. 2021, 203, 108617. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Y.; Song, F.; Zhang, H.; Zhang, Q.; Xu, J.; Wang, H.; Ke, F. Graphene Decorated Fiber for Wearable Strain Sensor with High Sensitivity at Tiny Strain. Adv. Mater. Technol. 2021, 6, 2100421. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.H.; Schubert, D.W. Highly Sensitive Ultrathin Flexible Thermoplastic Polyurethane/Carbon Black Fibrous Film Strain Sensor with Adjustable Scaffold Networks. Nano-Micro Lett. 2021, 13, 64. [Google Scholar] [CrossRef]
- Cao, Z.; Wang, R.; He, T.; Xu, F.; Sun, J. Interface-Controlled Conductive Fibers for Wearable Strain Sensors and Stretchable Conducting Wires. ACS Appl. Mater. Interfaces 2018, 10, 14087–14096. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, Y.L.; Niu, W.; Yang, X.; Jiang, Z.; Lu, Z.Y.; Liu, X.; Sun, J. Healable and Recyclable Elastomers with Record-High Mechanical Robustness, Unprecedented Crack Tolerance, and Superhigh Elastic Restorability. Adv. Mater. 2021, 33, 21014. [Google Scholar] [CrossRef] [PubMed]
- Qiao, A.; Cui, M.; Huang, R.; Ding, G.; Qi, W.; He, Z.; Klemes, J.J.; Su, R. Advances in Nanocellulose-based Materials as Adsorbents of Heavy Metals and Dyes. Carbohydr. Polym. 2021, 272, 118471. [Google Scholar] [CrossRef] [PubMed]
- Dhali, K.; Ghasemlou, M.; Daver, F.; Cass, P.; Adhikari, B. A Review of Nanocellulose as a New Material Towards Environmental Sustainability. Sci. Total Environ. 2021, 775, 145871. [Google Scholar] [CrossRef]
- Qiang, L.; Ji, C.; Li, Y.; Shi, G. High-Performance Strain Sensors with Fish Scale-Like Graphene Sensing Layers for Full-Range Detection of Human Motions. ACS Nano 2016, 10, 7901–7906. [Google Scholar] [CrossRef]
- Liu, D.-S.; Ryu, H.; Khan, U.; Wu, C.; Jung, J.-H.; Wu, J.; Wang, Z.; Kim, S.-W. Piezoionic-powered Graphene Strain Sensor Based on Solid Polymer Electrolyte. Nano Energy 2021, 81, 105610. [Google Scholar] [CrossRef]
- Zhai, Y.; Yu, Y.; Zhou, K.; Yun, Z.; Huang, W.; Liu, H.; Xia, Q.; Dai, K.; Zheng, G.; Liu, C.; et al. Flexible and Wearable Carbon Black/Thermoplastic Polyurethane Foam with a Pinnate-veined Aligned Porous Structure for Multifunctional Piezoresistive Sensors. Chem. Eng. J. 2020, 382, 122985. [Google Scholar] [CrossRef]
- Joy, N.; Anuraj, R.; Viravalli, A.; Dixit, H.N.; Samavedi, S. Coupling Between Voltage and Tip-to-collector Distance in Polymer Electrospinning: Insights from Analysis of Regimes, Transitions and Cone/Jet features. Chem. Eng. Sci. 2021, 230, 116200. [Google Scholar] [CrossRef]
- Wu, Y.-K.; Wang, L.; Fan, J.; Shou, W.; Liu, Y. A Double-switching Voltage: Controlling Multiple Jets in Electrospinning. Mater. Lett. 2018, 233, 359–362. [Google Scholar] [CrossRef]
- Koski, A.; Yim, K.; Shivkumar, S. Effect of Molecular Weight on Fibrous PVA Produced by Electrospinning. Mater. Lett. 2004, 58, 493–497. [Google Scholar] [CrossRef]
- Lee, J.S.; Choi, K.H.; Do Ghim, H.; Kim, S.S.; Chun, D.H.; Kim, H.Y.; Lyoo, W.S. Role of Molecular Weight of Atactic Poly(vinyl alcohol) (PVA) in the Structure and Properties of PVA Nanofabric Prepared by Electrospinning. J. Appl. Polym. Sci. 2004, 93, 1638–1646. [Google Scholar] [CrossRef]
- Katsogiannis, K.A.G.; Vladisavljevic, G.T.; Georgiadou, S. Porous Electrospun Polycaprolactone (PCL) Fibres by Phase Separation. Eur. Polym. J. 2015, 69, 284–295. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; Zhang, Q.; Wang, L.; Wang, X.; Long, S.; Yang, J. Porous Electrospun Ultrafine Fibers via a Liquid-liquid Phase Separation Method. Colloid Polym. Sci. 2013, 291, 1293–1296. [Google Scholar] [CrossRef]
- Rezabeigi, E.; Wood-Adams, P.M.; Demarquette, N.R. Complex Morphology Formation in Electrospinning of Binary and Ternary Poly(lactic acid) Solutions. Macromolecules 2018, 51, 4094–4107. [Google Scholar] [CrossRef]
- Chen, P.-Y.; Tung, S.-H. One-Step Electrospinning To Produce Nonsolvent-Induced Macroporous Fibers with Ultrahigh Oil Adsorption Capability. Macromolecules 2017, 50, 2528–2534. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, C.; Pan, Z. Porous Bead-on-string poly(lactic acid) Fibrous Membranes for Air Filtration. J. Colloid Interface Sci. 2015, 441, 121–129. [Google Scholar] [CrossRef]
- Jiang, A.Y.; Pan, Z.J. Surface-porous and Hollow Poly(lactic acid) (SPH-PLA) and Surface-porous and Lotus-root-like PLA (SPL-PLA) Nanofibres: Preparation, Quantitative Analysis, and Modelling. J. Nanopart. Res. 2020, 22, 1–21. [Google Scholar] [CrossRef]
- Li, H.; Wang, Z.; Zhang, H.Y.; Pan, Z.J. Nanoporous PLA/(Chitosan Nanoparticle) Composite Fibrous Membranes with Excellent Air Filtration and Antibacterial Performance. Polymers 2018, 10, 1085. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Yao, Y.; Wang, W.; Wang, X.; Li, L.; Zhuang, Q.; Lin, S. Light-Driven Transformation of Bio-Inspired Superhydrophobic Structure via Reconfigurable PAzoMA Microarrays: From Lotus Leaf to Rice Leaf. Macromolecules 2018, 51, 2742–2749. [Google Scholar] [CrossRef]
- Li, B.; Luo, J.; Huang, X.; Lin, L.; Wang, L.; Hu, M.; Tang, L.; Xue, H.; Gao, J.; Mai, Y.W. A Highly Stretchable, Super-hydrophobic Strain Sensor Based on Polydopamine and Graphene Reinforced Nanofiber Composite for Human Motion Monitoring. Compos. Part B Eng. 2020, 181, 107680. [Google Scholar] [CrossRef]
- Jia, Y.; Yue, X.; Wang, Y.; Yan, C.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Multifunctional Stretchable Strain Sensor Based on Polydopamine/Reduced Graphene Oxide/Electrospun Thermoplastic Polyurethane Fibrous Mats for Human Motion Detection and Environment Monitoring. Compos. Part B Eng. 2020, 183, 107696. [Google Scholar] [CrossRef]
- Grant, J.J.; Pillai, S.C.; Hehir, S.; McAfee, M.; Breen, A. Biomedical Applications of Electrospun Graphene Oxide. ACS Biomater. Sci. Eng. 2021, 7, 1278–1301. [Google Scholar] [CrossRef]
- Ginestra, P.; Riva, L.; Fiorentino, A.; Zappa, D.; Ceretti, E. Electrospinning of Poly(vinyl alcohol)-Graphene Oxide Aligned Fibers. Procedia CIRP 2020, 89, 110–115. [Google Scholar] [CrossRef]
- Deng, Y.; Han, D.; Deng, Y.Y.; Zhang, Q.; Chen, F.; Fu, Q. Facile One-step Preparation of Robust Hydrophobic Cotton Fabrics by Covalent Bonding Polyhedral Oligomeric Silsesquioxane for Ultrafast Oil/Water Separation. Chem. Eng. J. 2020, 379, 122391. [Google Scholar] [CrossRef]
- Deng, Y.Y.; Han, D.; Zhou, D.L.; Liu, Z.Q.; Zhang, Q.; Li, Y.; Fu, Q. Monodispersed Hybrid Microparticles Based on Polyhedral Oligomeric Silsesquioxane with Good UV Resistance and High Thermal Stability: From Organic to Inorganic. Polymer 2019, 178, 121609. [Google Scholar] [CrossRef]
- Dai, L.; Wang, Y.; Zou, X.; Chen, Z.; Liu, H.; Ni, Y. Ultrasensitive Physical, Bio, and Chemical Sensors Derived from 1-, 2-, and 3-D Nanocellulosic Materials. Small 2020, 16, 1906567. [Google Scholar] [CrossRef]
- Liu, Q.; Ramakrishna, S.; Long, Y.Z. Electrospun Flexible Sensor. J. Semicond. 2019, 40, 111603. [Google Scholar] [CrossRef]
- Zhang; Jia; Liu; Wei; Su, Electrospinning Nanoparticles-Based Materials Interfaces for Sensor Applications. Sensors 2019, 19, 3977. [CrossRef] [Green Version]
- Jin, X.; Feng, C.; Ponnamma, D.; Yi, Z.; Salim, N.V. Review on Exploration of Graphene in the Design and Engineering of Smart Sensors, Actuators and Soft Robotics. Chem. Eng. J. Adv. 2020, 4, 100034. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concentration | 12% | 14% | 16% | 18% | 20% |
|---|---|---|---|---|---|
| Specific surface area (m2/g) | 1.7754 | 4.5503 | 4.6869 | 4.2085 | 2.8931 |
| Aperture (nm) | 11.2880 | 8.1812 | 7.7864 | 6.8551 | 4.4871 |
| Electrospun Film | C1S (%) | O1S (%) | N1S (%) |
|---|---|---|---|
| CA/TPU | 78.40 | 15.56 | 6.04 |
| rGO@CA/TPU | 89.86 | 8.39 | 1.75 |
| GO/rGO@CA/TPU | 78.34 | 18.32 | 3.34 |
| Strain/% | GF | |
|---|---|---|
| rGO@CA/TPU | GO/rGO@CA/TPU | |
| 0.5 | 2.258 | 3.006 |
| 1.0 | 1.954 | 2.479 |
| 5.0 | 1.047 | 1.191 |
| 10.0 | 1.087 | 1.387 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Yi, T.; Liu, Y.; Zhao, H.; Liang, C. Design of a Highly Sensitive Reduced Graphene Oxide/Graphene Oxide@Cellulose Acetate/Thermoplastic Polyurethane Flexible Sensor. Sensors 2022, 22, 3281. https://doi.org/10.3390/s22093281
Yang Y, Yi T, Liu Y, Zhao H, Liang C. Design of a Highly Sensitive Reduced Graphene Oxide/Graphene Oxide@Cellulose Acetate/Thermoplastic Polyurethane Flexible Sensor. Sensors. 2022; 22(9):3281. https://doi.org/10.3390/s22093281
Chicago/Turabian StyleYang, Yujie, Tan Yi, Yang Liu, Hui Zhao, and Chen Liang. 2022. "Design of a Highly Sensitive Reduced Graphene Oxide/Graphene Oxide@Cellulose Acetate/Thermoplastic Polyurethane Flexible Sensor" Sensors 22, no. 9: 3281. https://doi.org/10.3390/s22093281