
Redundancy Reduction for Sensor Deployment in Prosthetic Socket: A Case Study



Abstract
:1. Introduction
2. Related Works
3. The Wearable Sensor Deployment Problem in Prosthetic Sockets
4. Sensor Redundancy Reduction Method
4.1. Overview
- Data input: The sensor data may have various formats depending on the sensory system, and they need to be converted to the actual pressure in the same unit. After that, the pressure data are cleaned and sliced into frames, which contain several gait cycles, to maintain enough information during the dynamic tests. These frames constitute the initial dataset for the analysis method.
- Redundancy detection: By adjusting the parameters of the SOM and feeding with different data frames from the initial dataset, multiple clustering results are learned. Among them, one common clustering result (which appears the most for all the data frames and model configurations) is picked up as the target model to detect the sensor redundancy for the input case.
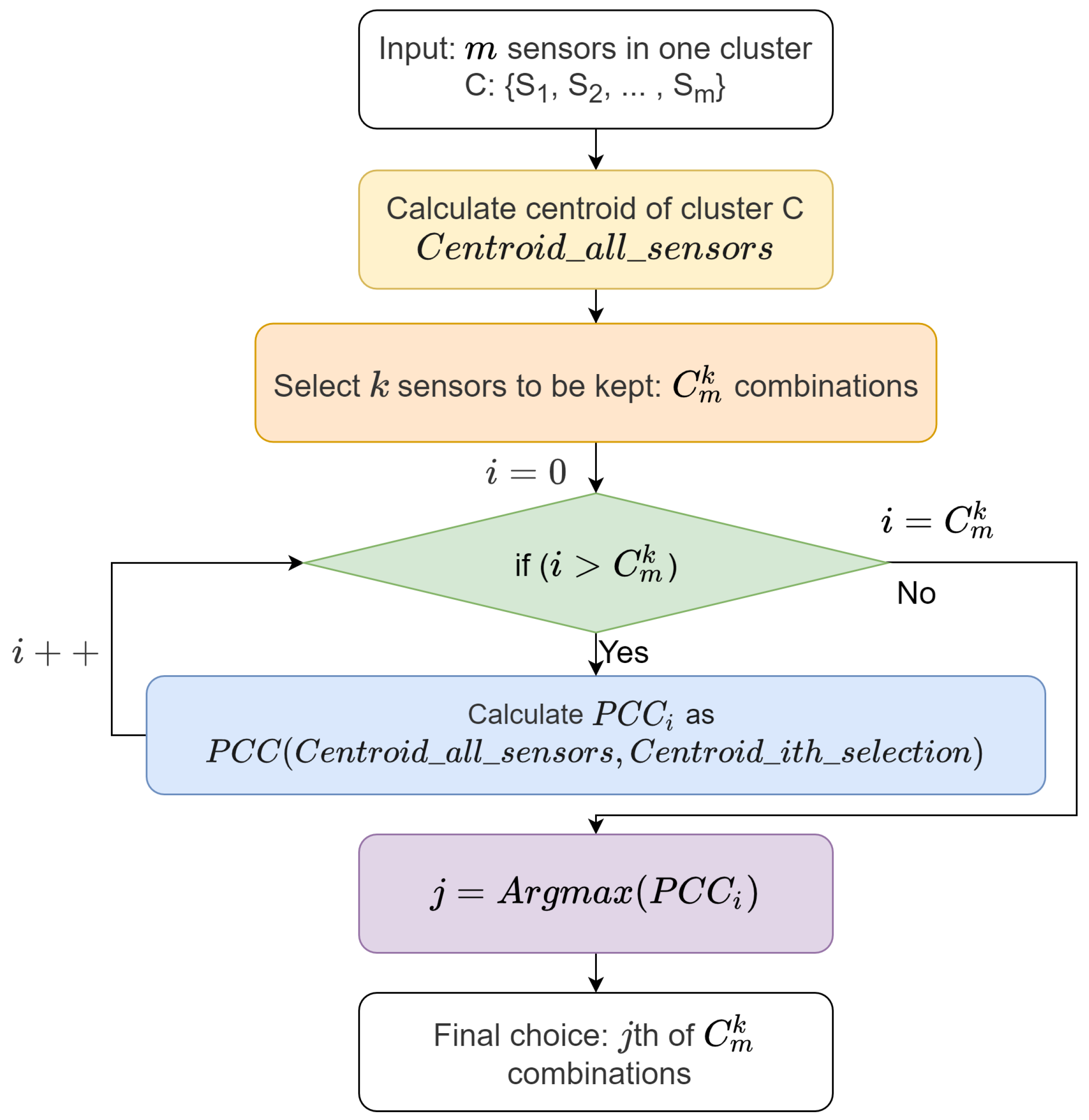
- Sensor density reduction: According to the redundancy detection model, the local redundancy in current placement is recognized. Considering the actual requirements and the capability of the sensory system, the unnecessary sensors can be removed from the corresponding clusters. The similarity metrics such as PCC can be used to guide the selection.
- Result validation: The sensor removal results need to be evaluated based on the choice from step 3. The pressure distribution over the whole test from the initial sensor layout will be compared with readings from the reserved sensors, using entropy-based metrics such as the Jenson–Shannon Divergence (JSD). After the posterior evaluation, we can determine how dependable our sensor selection is.
4.2. Redundancy Detection and Clustering Algorithms
- Initialization: The weights of the SOM are first initialized, e.g., with some small random numbers.
- Competition: Each input will find its best matching unit using some judgement methods in a time series, i.e., the distance metric. The winning unit is called the best matching unit ().
- Cooperation: The decides the range of its neighbors to update weights. Suppose we use the Gaussian distribution, is the parameter decay as iteration grows, with the initial standard deviation and current iteration number t. Then, the update distribution T of node j is given by and D is the geometry distance between node j and BMU. The closer neighbor will obtain a larger update.
- Adaptation: The weights of the neurons are updated by In the equation, the learning rate is defined as
- Iteration: Go back to the above steps from the competition until iterations are complete. The final winning neurons of the input time series are their clusters.
4.3. Metrics for Guiding Sensor Removal
4.4. Validation after Sensor Removal
5. Experiments and Results
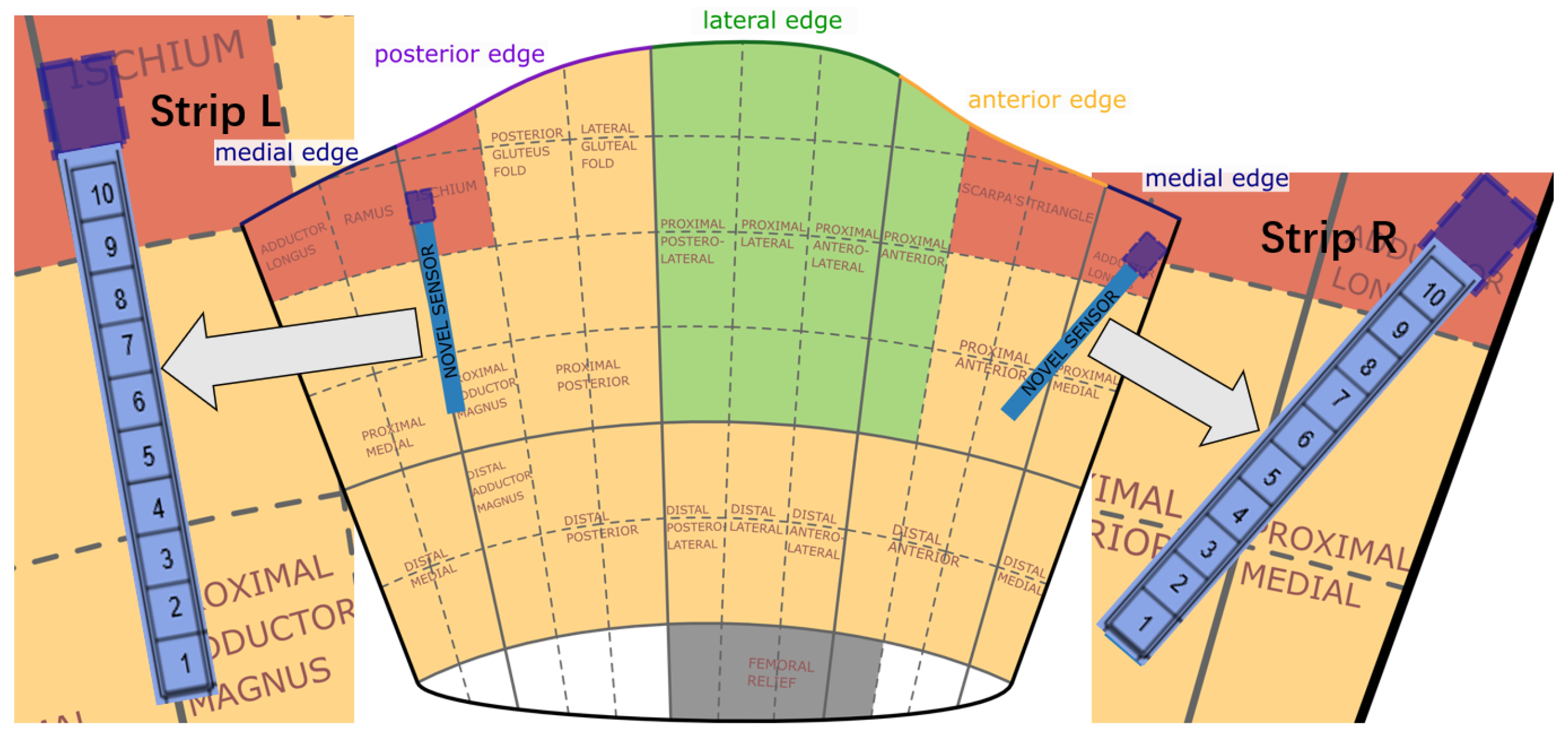
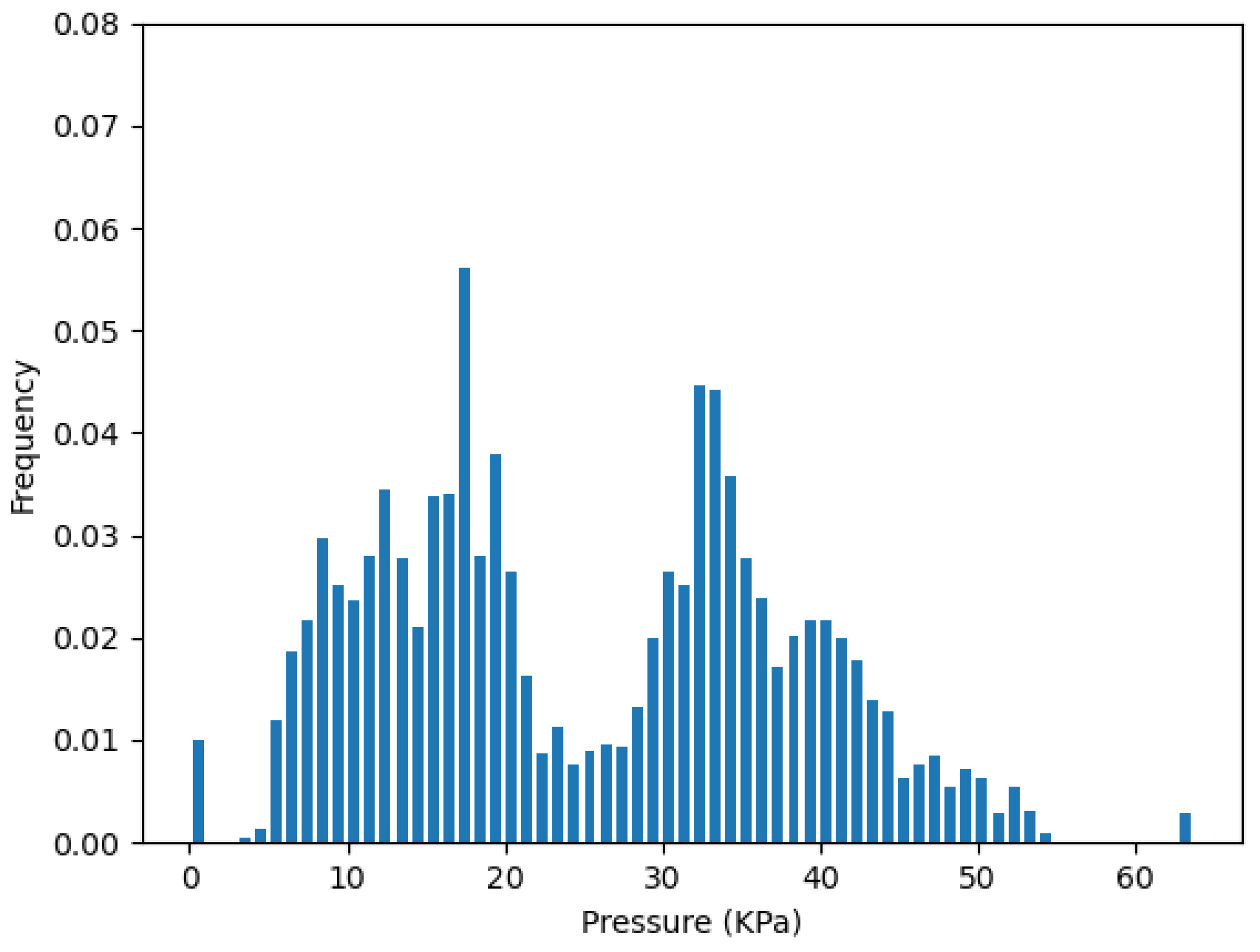
5.1. Sensor Data Acquisition
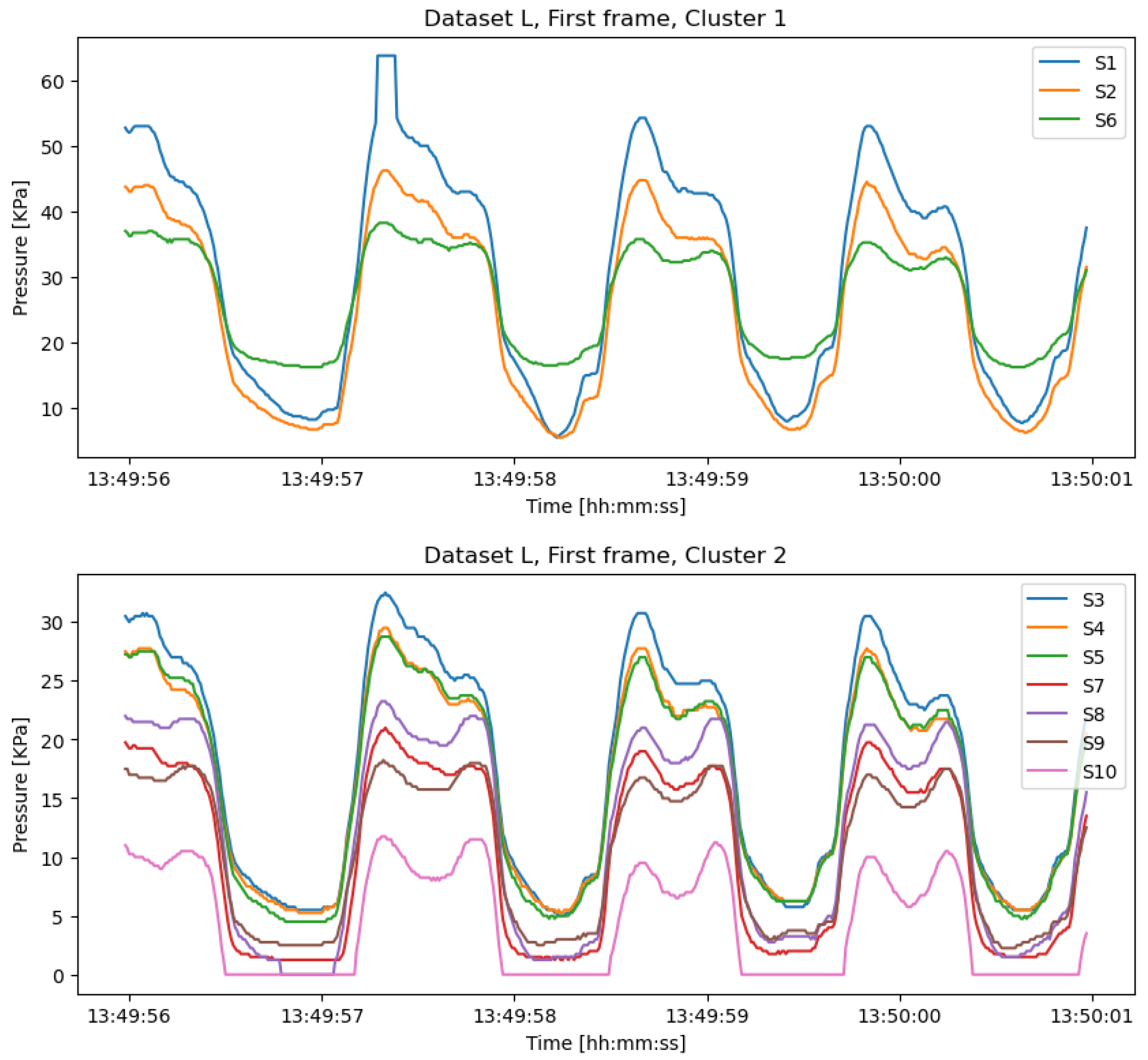
5.2. Redundancy Detection
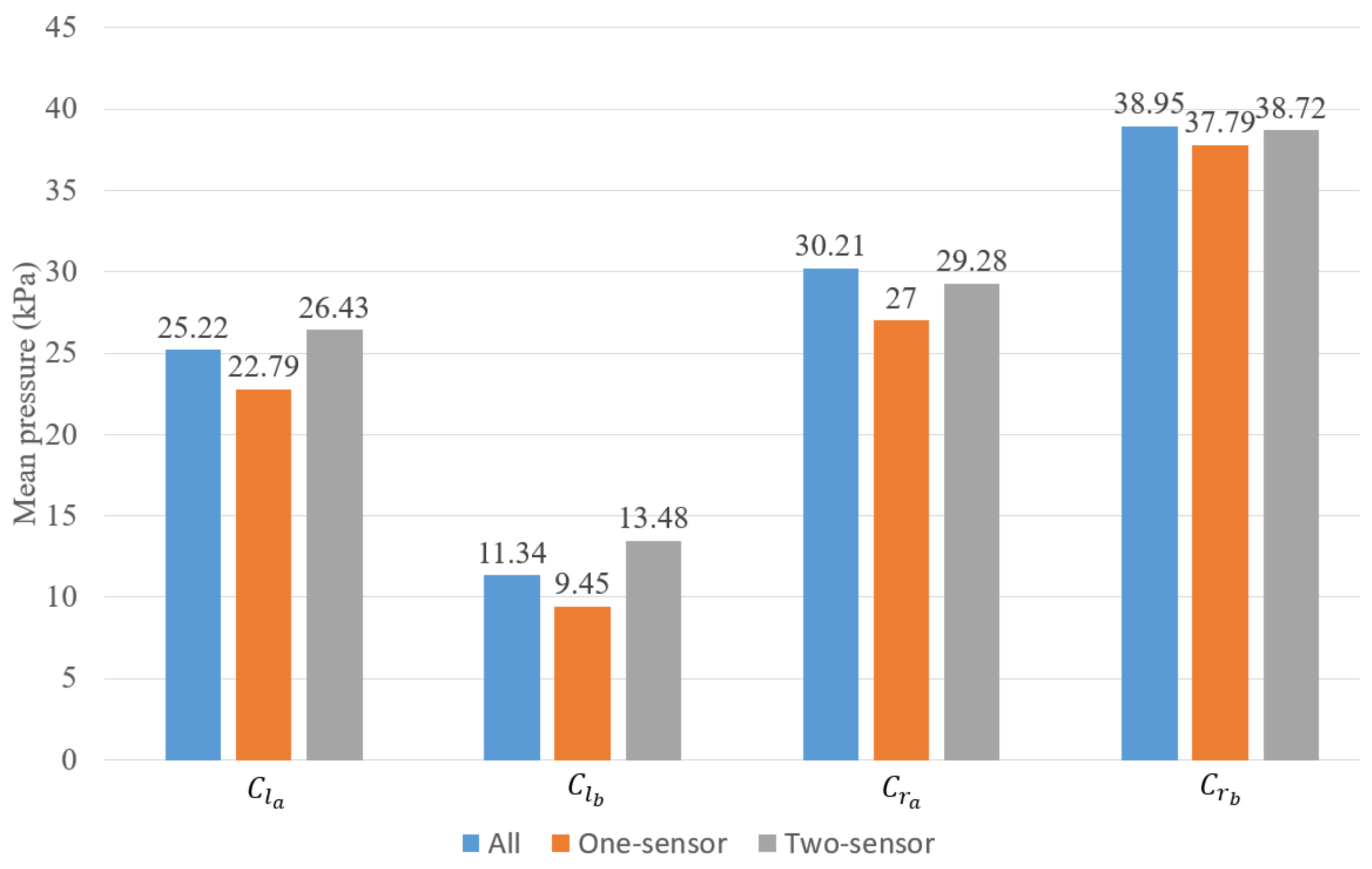
5.3. Sensor Removal Result
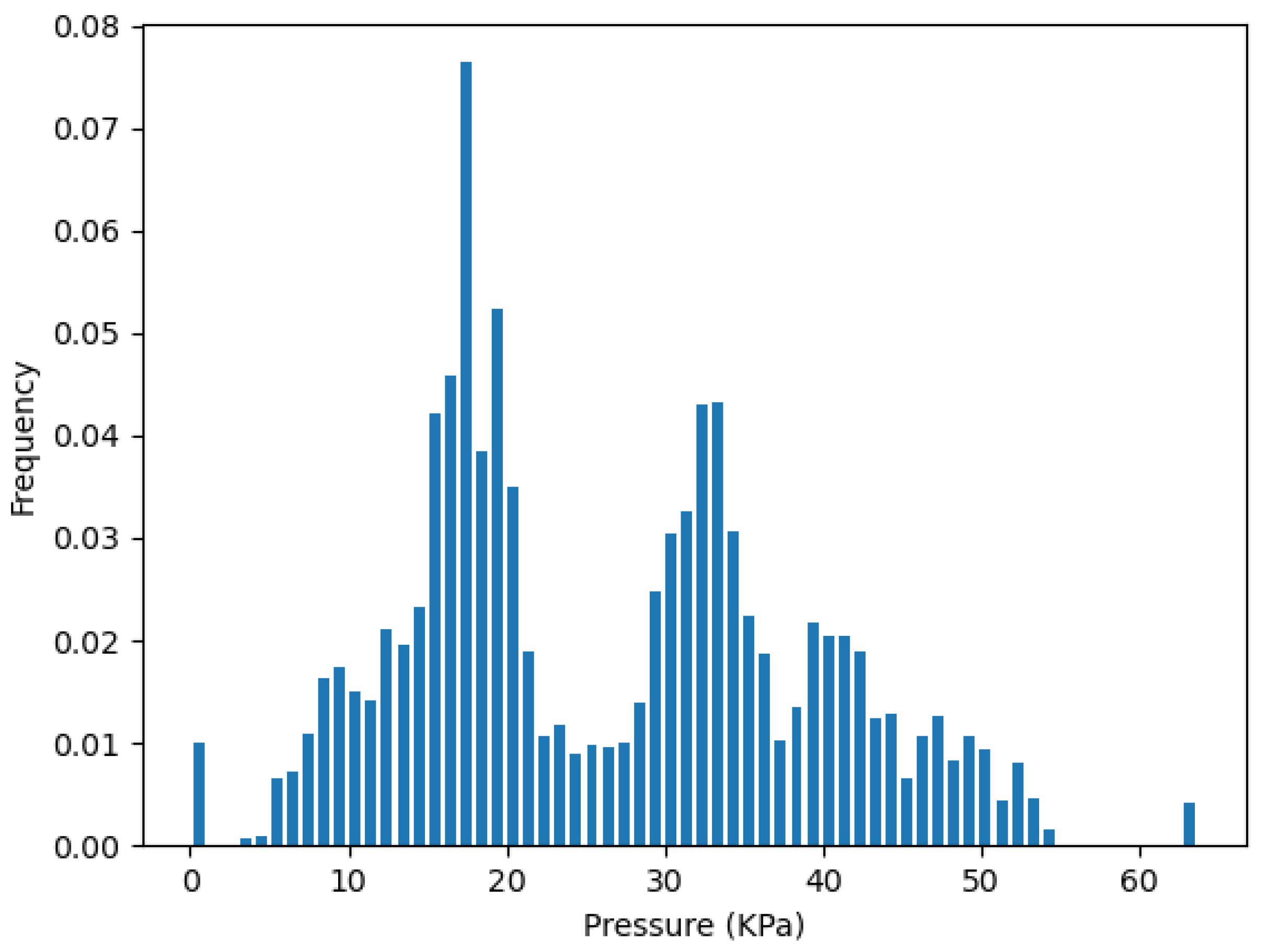
5.4. Validation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Paternò, L.; Ibrahimi, M.; Gruppioni, E.; Menciassi, A.; Ricotti, L. Sockets for Limb Prostheses: A Review of Existing Technologies and Open Challenges. IEEE Trans. Biomed. Eng. 2018, 65, 1996–2010. [Google Scholar] [CrossRef] [PubMed]
- Paternò, L.; Ibrahimi, M.; Rosini, E.; Menfi, G.; Monaco, V.; Gruppioni, E.; Ricotti, L.; Menciassi, A. Residual Limb Volume Fluctuations in Transfemoral Amputees. Sci. Rep. 2021, 11, 12273. [Google Scholar] [CrossRef] [PubMed]
- Gupta, S.; Loh, K.J.; Pedtke, A. Sensing and Actuation Technologies for Smart Socket Prostheses. Biomed. Eng. Lett. 2020, 10, 103–118. [Google Scholar] [CrossRef] [PubMed]
- Al-Fakih, E.A.; Abu Osman, N.A.; Mahmad Adikan, F.R. Techniques for Interface Stress Measurements within Prosthetic Sockets of Transtibial Amputees: A Review of the Past 50 Years of Research. Sensors 2016, 16, 1119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Radmand, A.; Scheme, E.; Englehart, K. High-density force myography: A possible alternative for upper-limb prosthetic control. J. Rehabil. Res. Dev. 2016, 53, 443–456. [Google Scholar] [CrossRef]
- Ali, S.; Osman, N.A.A.; Mortaza, N.; Eshraghi, A.; Gholizadeh, H.; Wan Abas, W.A.B.B. Clinical Investigation of the Interface Pressure in the Trans-tibial Socket with Dermo and Seal-In X5 Liner During Walking and Their Effect on Patient Satisfaction. Clin. Biomech. 2012, 27, 943–948. [Google Scholar] [CrossRef] [Green Version]
- Ali, S.; Abu Osman, N.A.; Eshraghi, A.; Gholizadeh, H.; bin Abd razak, N.A.; Wan Abas, W.A.B.B. Interface Pressure in Transtibial Socket during Ascent and Descent on Stairs and Its Effect on Patient Satisfaction. Clin. Biomech. 2013, 28, 994–999. [Google Scholar] [CrossRef] [Green Version]
- Jasni, F.; Hamzaid, N.A.; Muthalif, A.G.A.; Zakaria, Z.; Shasmin, H.N.; Ng, S.C. In-socket Sensory System for Transfemoral Amputees Using Piezoelectric Sensors: An Efficacy Study. IEEE/ASME Trans. Mechatron. 2016, 21, 2466–2476. [Google Scholar] [CrossRef]
- Kohonen, T. The Self-organizing Map. Proc. IEEE 1990, 78, 1464–1480. [Google Scholar] [CrossRef]
- Chang, D.J.; Desoky, A.H.; Ouyang, M.; Rouchka, E.C. Compute Pairwise Manhattan Distance and Pearson Correlation Coefficient of Data Points with GPU. In Proceedings of the 2009 10th ACIS International Conference on Software Engineering, Artificial Intelligences, Networking and Parallel/Distributed Computing, Washington, DC, USA, 27–29 May 2009; pp. 501–506. [Google Scholar]
- Lin, J. Divergence Measures Based on the Shannon Entropy. IEEE Trans. Inf. Theory 1991, 37, 145–151. [Google Scholar] [CrossRef] [Green Version]
- Commuri, S.; Day, J.; Dionne, C.P.; Ertl, W.J. Assessment of Pressures within the Prosthetic Socket of a Person with Osteomyoplastic Amputation during Varied Walking Tasks. JPO J. Prosthetics Orthot. 2010, 22, 127–137. [Google Scholar] [CrossRef]
- Tran, V.T.; Kenta, T.; Hanafusa, A.; Yamamoto, S.i.; Ohnishi, K.; Otsuka, H.; Agarie, Y. Analyzing the Pressure and Shear Stress of Contact Interface inside the Trans-femoral Socket during Walking. SEATUC J. Sci. Eng. 2020, 1, 104–109. [Google Scholar]
- D’Urso, P.; Di Lallo, D.; Maharaj, E.A. Autoregressive Model-based Fuzzy Clustering and Its Application for Detecting Information Redundancy in Air Pollution Monitoring Networks. Soft Comput. 2013, 17, 83–131. [Google Scholar] [CrossRef]
- MacQueen, J. Some methods for classification and analysis of multivariate observations. In Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability, Volume 1: Statistics, Berkeley, CA, USA, 21 June–18 July 1965; University of California Press: Berkeley, CA, USA, 1967; pp. 281–297. [Google Scholar]
- Bezdek, J.C.; Ehrlich, R.; Full, W. FCM: The Fuzzy C-means Clustering Algorithm. Comput. Geosci. 1984, 10, 191–203. [Google Scholar] [CrossRef]
- Sanders, J.E.; Garbini, J.L.; McLean, J.B.; Hinrichs, P.; Predmore, T.J.; Brzostowski, J.T.; Redd, C.B.; Cagle, J.C. A Motor-driven Adjustable Prosthetic Socket Operated Using a Mobile Phone App: A Technical Note. Med. Eng. Phys. 2019, 68, 94–100. [Google Scholar] [CrossRef]
- Ibrahimi, M.; Paternò, L.; Ricotti, L.; Menciassi, A. A Layer Jamming Actuator for Tunable Stiffness and Shape-changing Devices. Soft Robot. 2021, 8, 85–96. [Google Scholar] [CrossRef]
- Weathersby, E.J.; Garbini, J.L.; Larsen, B.G.; McLean, J.B.; Vamos, A.C.; Sanders, J.E. Automatic Control of Prosthetic Socket Size for People with Transtibial Amputation: Implementation and Evaluation. IEEE Trans. Biomed. Eng. 2020, 68, 36–46. [Google Scholar] [CrossRef]
- Frillici, F.S.; Rotini, F. Prosthesis Socket Design Through Shape Optimization. Comput. Aided Des. Appl. 2013, 10, 863–876. [Google Scholar] [CrossRef]
- Jain, G.; Mahara, T.; Tripathi, K.N. A Survey of Similarity Measures for Collaborative Filtering-based Recommender System. In Soft Computing: Theories and Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 343–352. [Google Scholar]
- Shirkhorshidi, A.S.; Aghabozorgi, S.; Wah, T.Y. A Comparison Study on Similarity and Dissimilarity Measures in Clustering Continuous Data. PLoS ONE 2015, 10, e0144059. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, F. On a Generalization of the Jensen–Shannon Divergence and the Jensen–Shannon Centroid. Entropy 2020, 22, 221. [Google Scholar] [CrossRef] [Green Version]
- Össur. Direct Socket TF. Available online: https://www.ossur.com/en-gb/prosthetics/sockets/direct-socket-tf (accessed on 11 January 2022).
- Neumann, E.S.; Wong, J.S.; Drollinger, R.L. Concepts of Pressure in an Ischial Containment Socket: Measurement. JPO J. Prosthetics Orthot. 2005, 17, 2–11. [Google Scholar] [CrossRef]
- Novel Electronics. Pliance-RLS Prothesis: Pressure between Human and Prosthesis. Available online: https://www.novel.de/products/pliance/prosthesis/ (accessed on 25 March 2021).
- Novel Electronics. Novel Sensor S2006. Available online: http://www.novelelectronics.de/novelcontent/sensors (accessed on 25 March 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Cluster | PCC |
|---|---|---|
| 0.9986 | ||
| 0.9997 | ||
| 0.9919 | ||
| 0.9925 | ||
| 0.9950 | ||
| 0.9977 | ||
| 0.9979 | ||
| 0.9936 | ||
| 0.9922 | ||
| 0.9597 |
| 1-sensor selection | ||||
| JSD | 0.084 | 0.224 | 0.092 | 0.045 |
| 2-sensor selection | , | , | , | , |
| JSD | 0.018 | 0.036 | 0.017 | 0.010 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Chen, Y.; Ko, S.-T.; Lu, Z. Redundancy Reduction for Sensor Deployment in Prosthetic Socket: A Case Study. Sensors 2022, 22, 3103. https://doi.org/10.3390/s22093103
Zhu W, Chen Y, Ko S-T, Lu Z. Redundancy Reduction for Sensor Deployment in Prosthetic Socket: A Case Study. Sensors. 2022; 22(9):3103. https://doi.org/10.3390/s22093103
Chicago/Turabian StyleZhu, Wenyao, Yizhi Chen, Siu-Teing Ko, and Zhonghai Lu. 2022. "Redundancy Reduction for Sensor Deployment in Prosthetic Socket: A Case Study" Sensors 22, no. 9: 3103. https://doi.org/10.3390/s22093103