
High-Precision Log-Ratio Spot Position Detection Algorithm with a Quadrant Detector under Different SNR Environments

Abstract
:1. Introduction
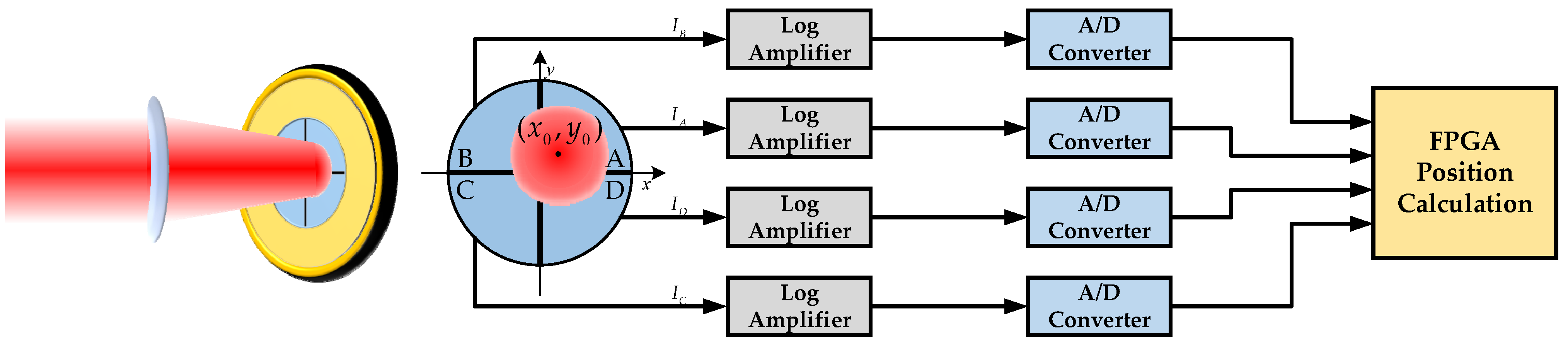
2. The Principle of the Log-Ratio Algorithm of a QD
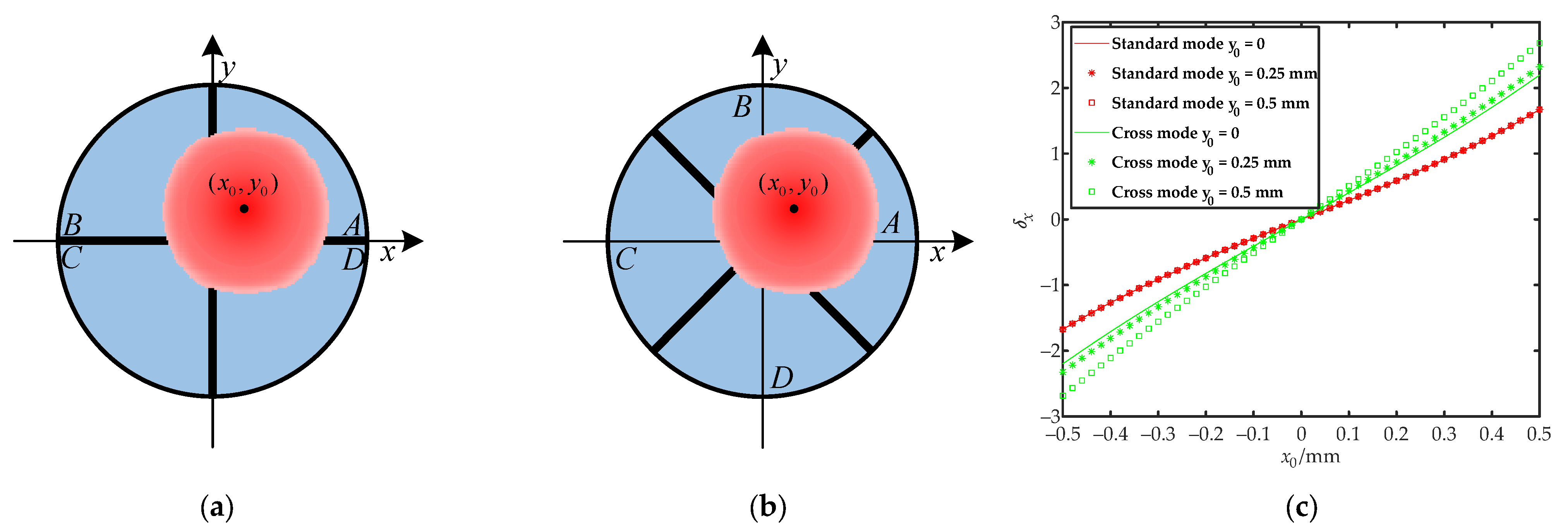
3. Theoretical Method of the Spot Position Measurement
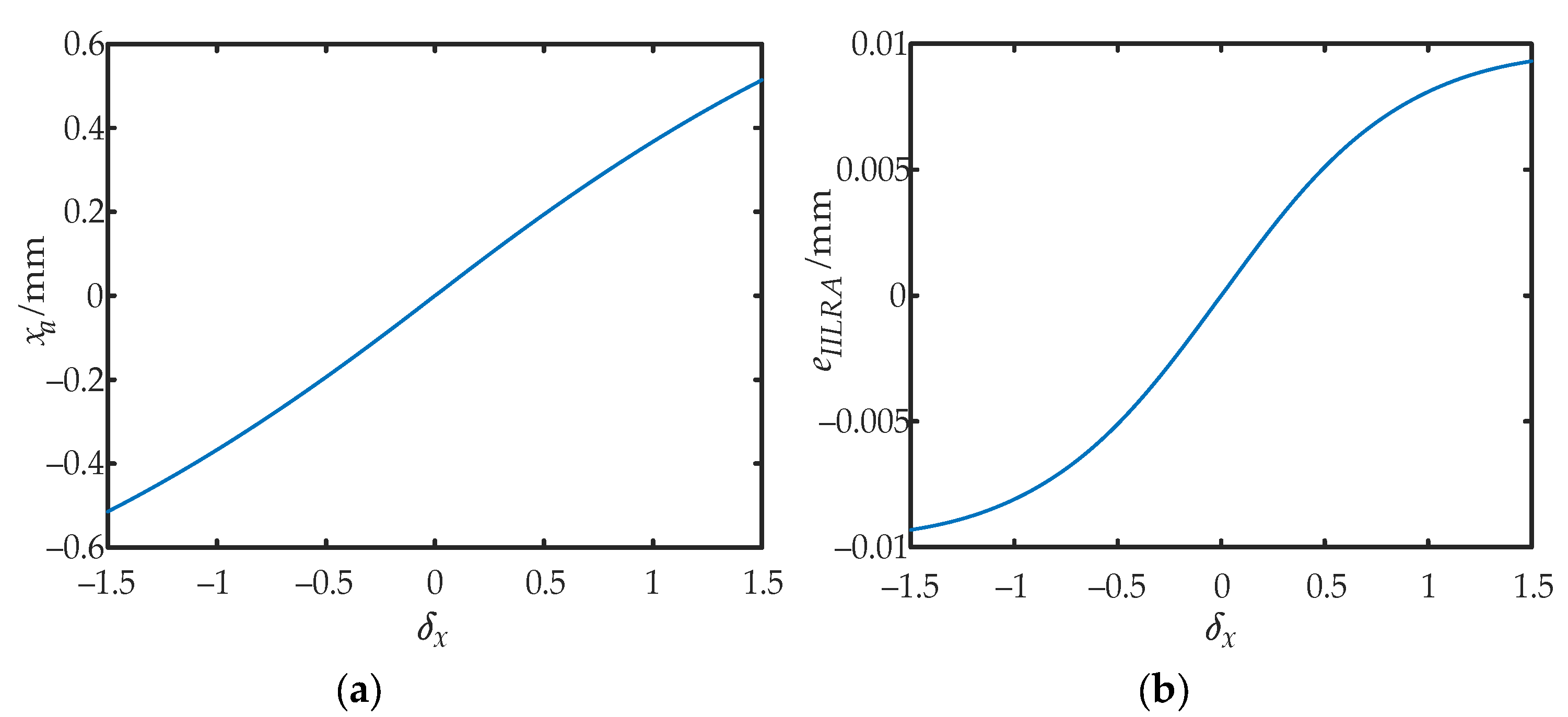
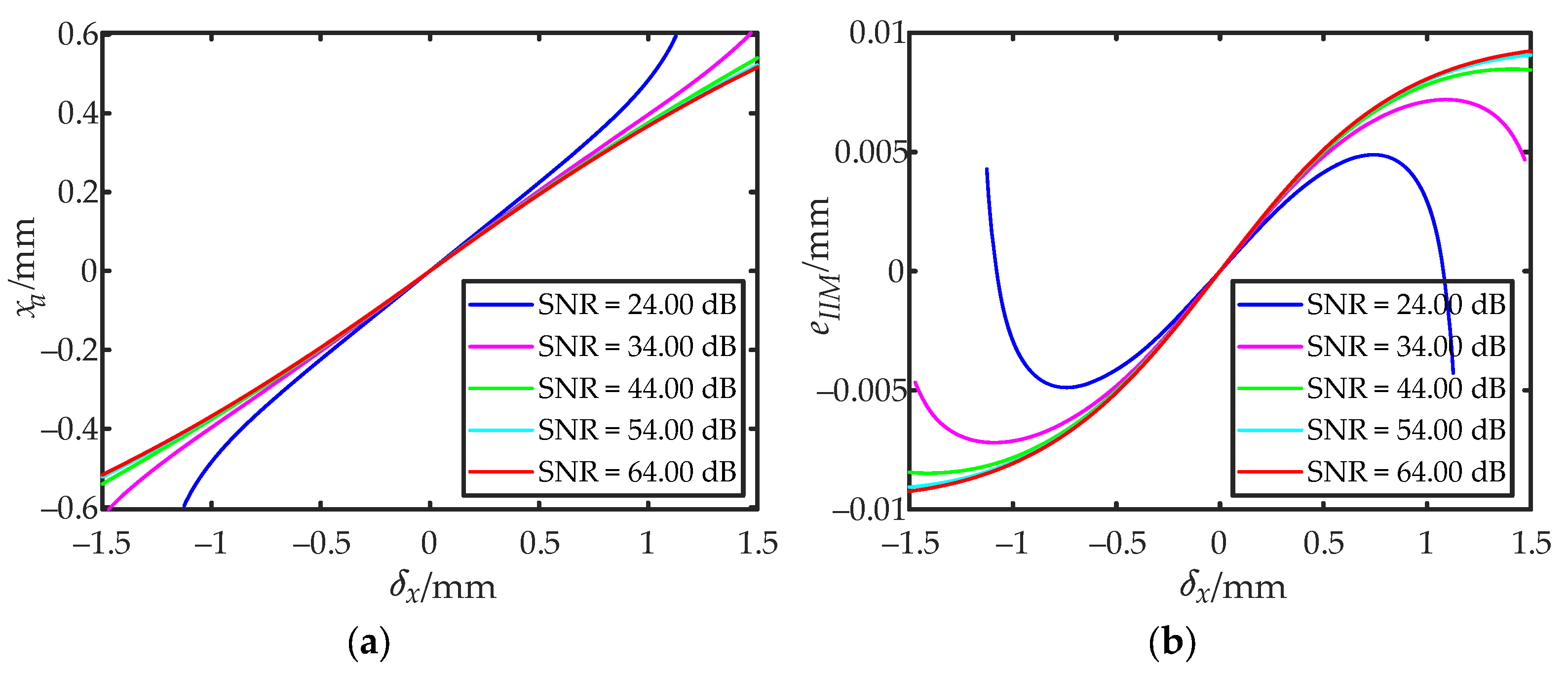
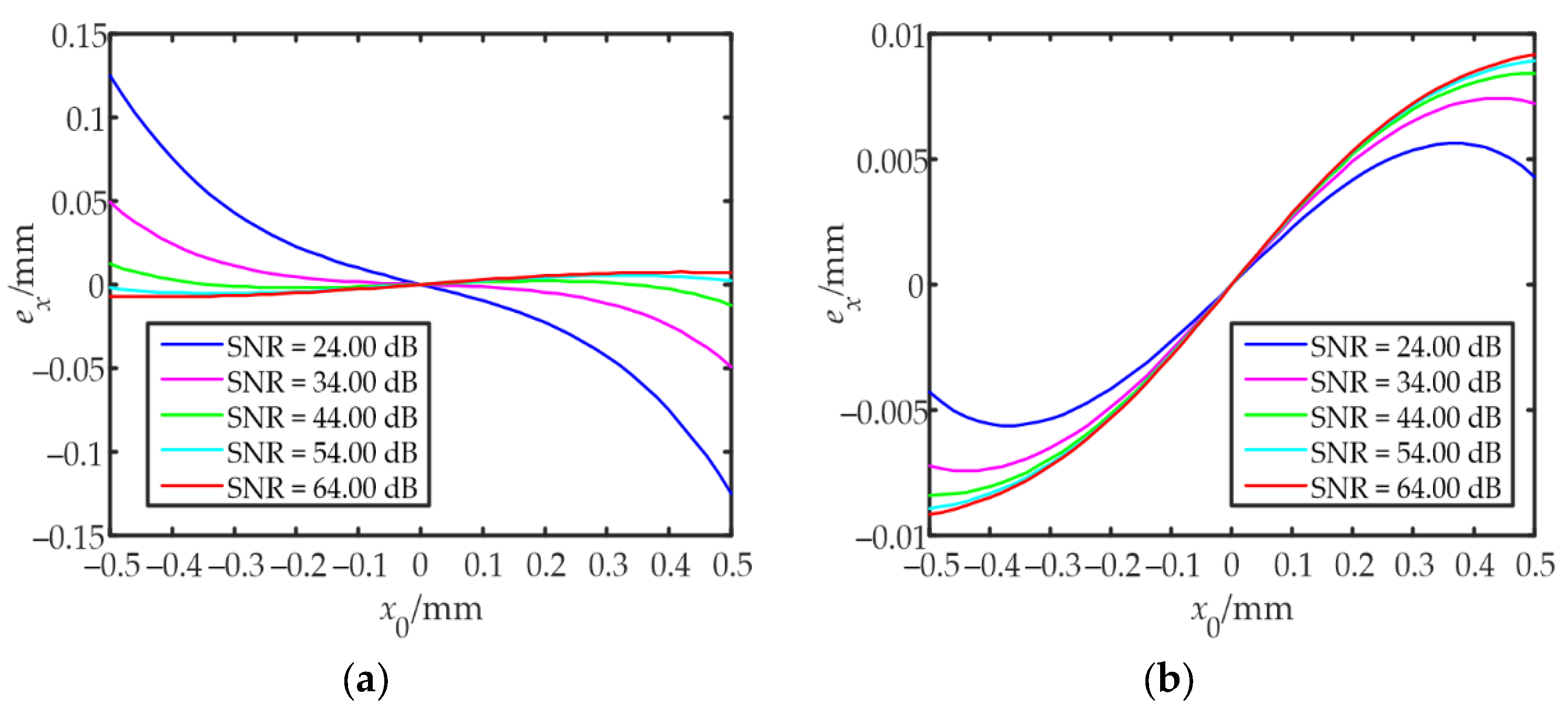
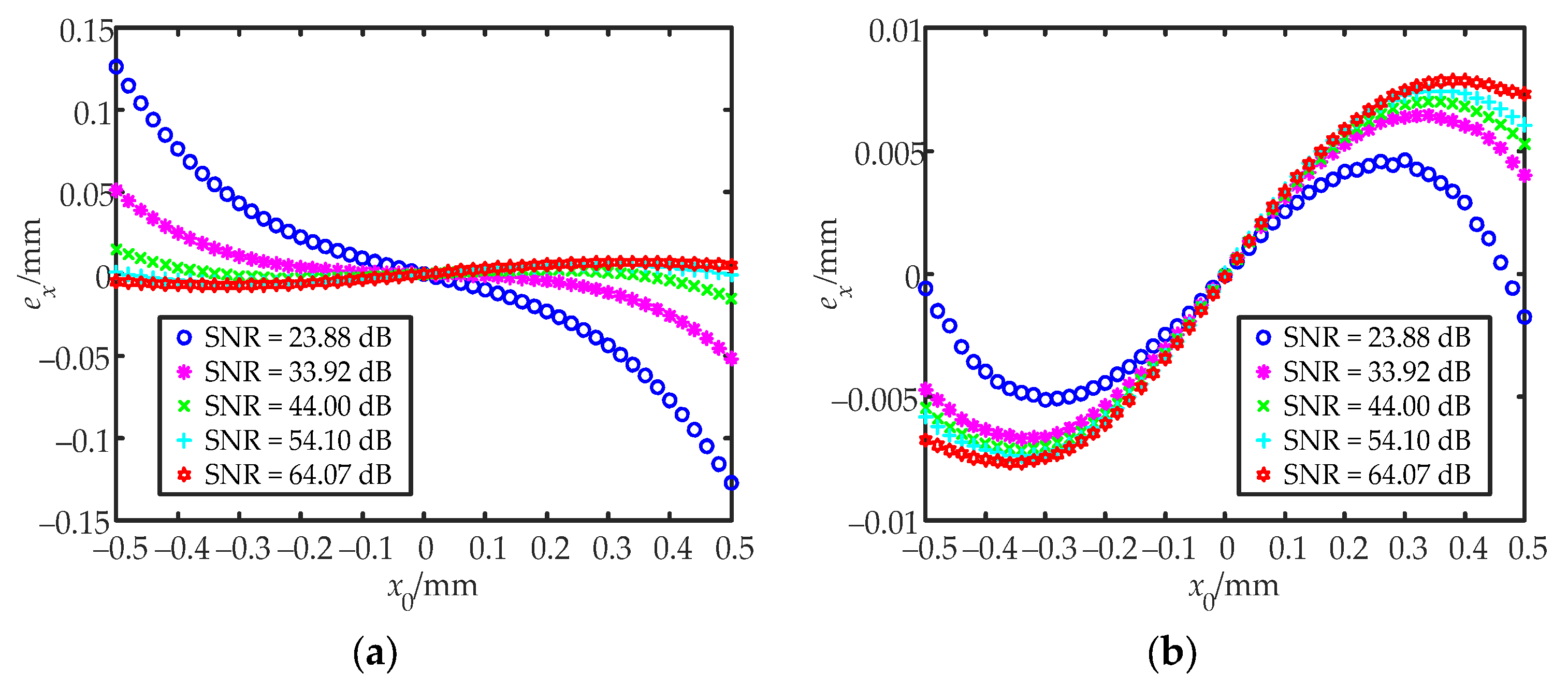
3.1. Integral Infinite Log-Ratio Algorithm
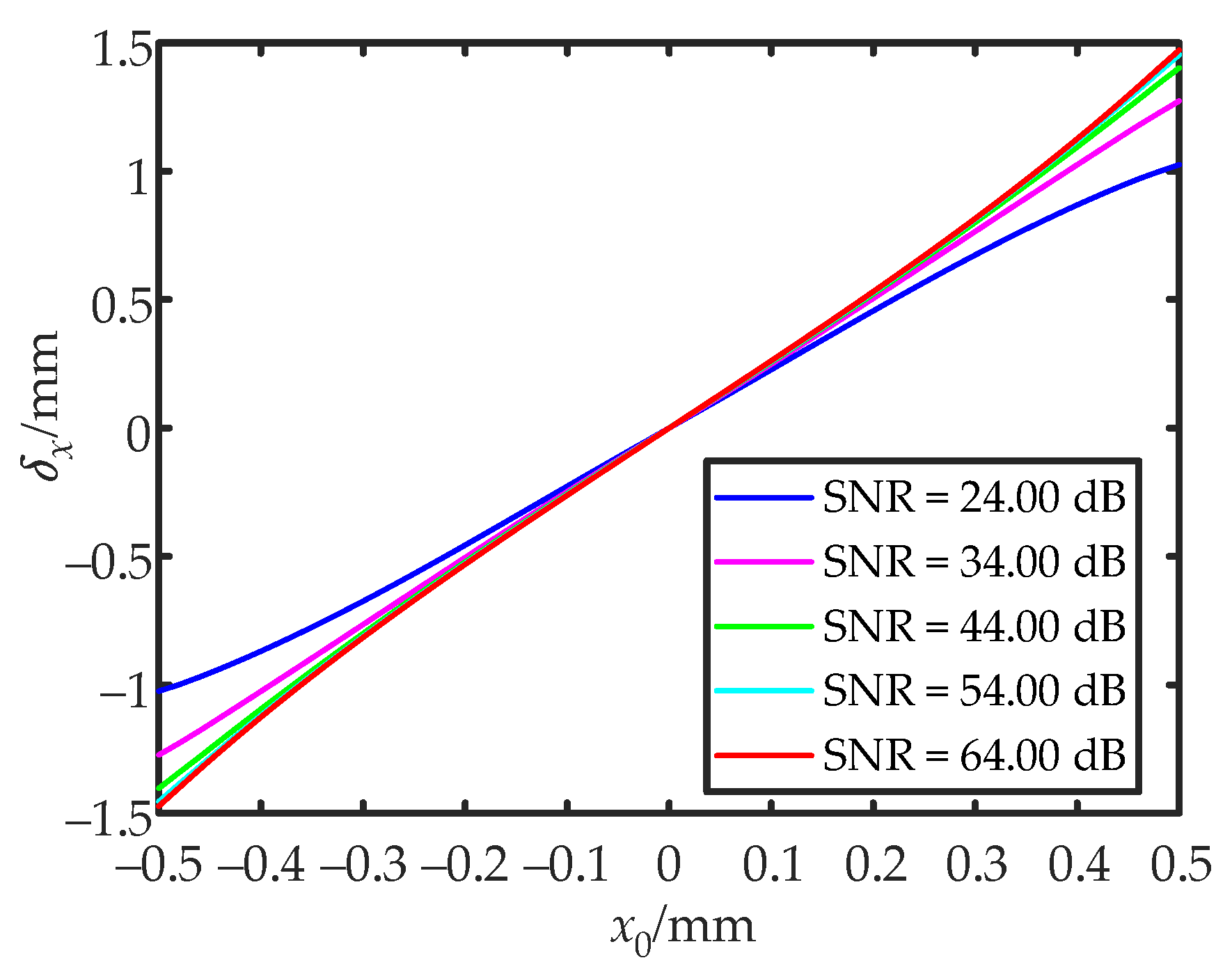
3.2. Integral Infinite Logarithmic Ratio Algorithm Based on SNR
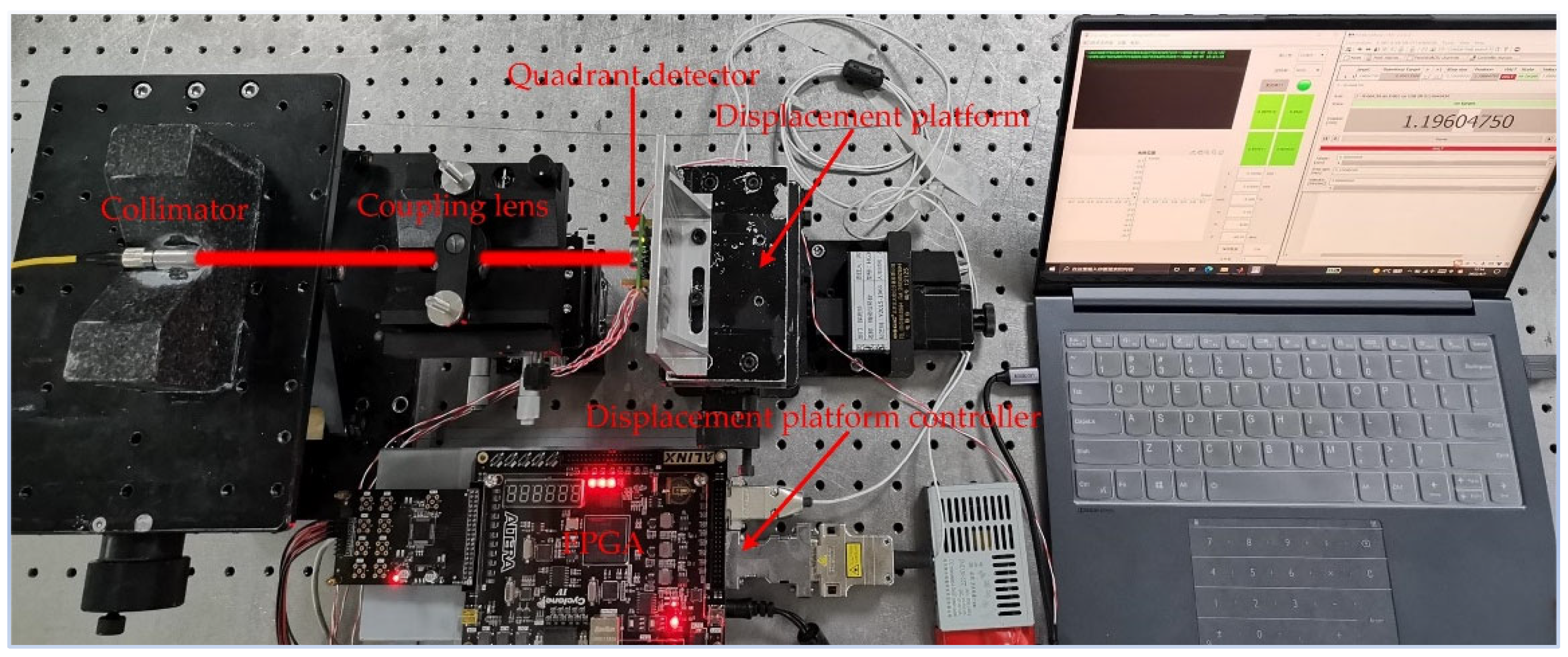
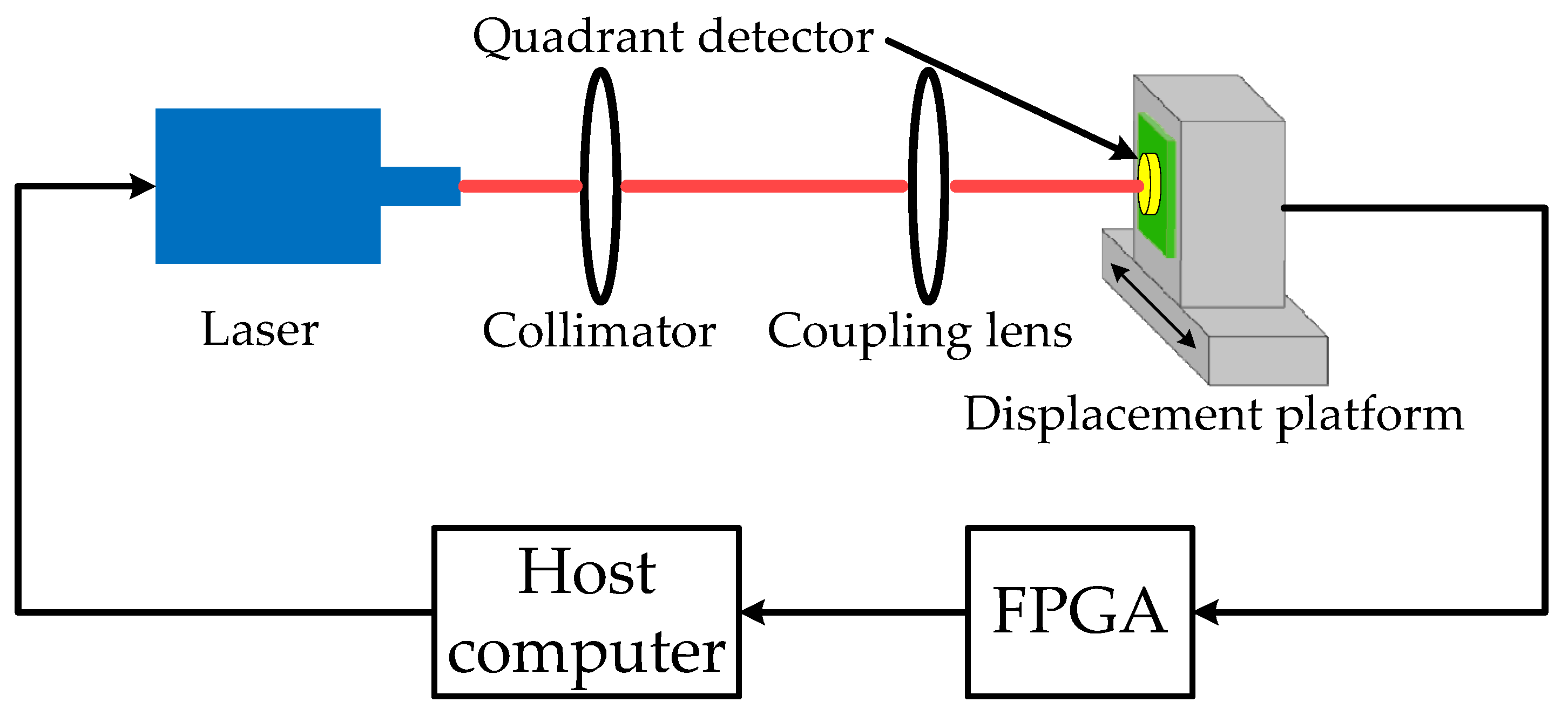
4. Experimental System and Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schütze, D.; Müller, V.; Heinzel, G. Precision absolute measurement and alignment of laser beam direction and position. Appl. Opt. 2014, 53, 6503–6507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yallapragada, V.J.; Mulay, G.L.; Rao, C.N.; Ravishankar, A.P.; Achanta, V.G. Direct measurement of the Goos-Hänchen shift using a scanning quadrant detector and a polarization maintaining fiber. Rev. Sci. Instrum. 2016, 87, 103109. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Itzler, M.A.; Zbinden, H.; Pan, J.W. Advances in InGaAs/InP single-photon detector systems for quantum communication. Light Sci. Appl. 2015, 4, e286. [Google Scholar] [CrossRef] [Green Version]
- De Celis, R.; Solano-López, P.; Cadarso, L. A neural network for sensor hybridization in rocket guidance. In Proceedings of the 2020 Winter Simulation Conference, Orlando, FL, USA, 14–18 December 2020. [Google Scholar] [CrossRef]
- Heinzel, G.; Álvarez, M.D.; Pizzella, A.; Brause, N.; Delgado, J.J.E. Tracking length and differential-wavefront-sensing signals from quadrant photodiodes in heterodyne interferometers with digital phase-locked-loop readout. Phys. Rev. Appl. 2020, 14, 054013. [Google Scholar] [CrossRef]
- Manojlović, L.M. Resolution limit of the quadrant photodetector. Optik 2016, 127, 7631–7634. [Google Scholar] [CrossRef]
- Nikulin, V.V.; Khandekar, R.M.; Sofka, J. Agile acousto-optic tracking system for free-space optical communications. Opt. Eng. 2008, 47, 064301. [Google Scholar] [CrossRef]
- Gu, L.; Sun, B.; Shen, C.; Lu, P.; Wang, J.; Wang, X.; Xiao, Y. Photon beam position measurement system based on four-quadrant detector. High Power Laser Part. Beams 2010, 22, 2964–2968. [Google Scholar]
- Zhang, W.; Zhang, H.; Zhang, X.; Chen, Y. Laser pulse peak estimation based on photon capture mode of quadrant photodetector. Optik 2016, 127, 10808–10816. [Google Scholar] [CrossRef]
- Chen, M.; Yang, Y.; Jia, X.; Gao, H. Investigation of positioning algorithm and method for increasing the linear measurement range for four-quadrant detector. Optik 2013, 124, 6806–6809. [Google Scholar] [CrossRef]
- Wu, J.; Chen, Y.; Gao, S.; Li, Y.; Wu, Z. Improved measurement accuracy of spot position on an InGaAs quadrant detector. Appl. Opt. 2015, 54, 8049–8054. [Google Scholar] [CrossRef] [PubMed]
- Vo, Q.; Zhang, X.; Fang, F. Extended the linear measurement range of four-quadrant detector by using modified polynomial fitting algorithm in micro-displacement measuring system. Opt. Laser Technol. 2019, 112, 332–338. [Google Scholar] [CrossRef]
- Wang, X.; Su, X.; Liu, G.; Han, J.; Wang, K.; Zhu, W. A Method for Improving the Detection Accuracy of the Spot Position of the Four-Quadrant Detector in a Free Space Optical Communication System. Sensors 2020, 20, 7164. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Xu, S.; Yu, J.; Yan, L.; Huang, Y. An improved method for the position detection of a quadrant detector for free space optical communication. Sensors 2019, 19, 175. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, W.; Huang, Y.; Fan, K.C.; Zhang, J. A novel machine learning algorithm for large measurement range of quadrant photodetector. Optik 2021, 227, 165971. [Google Scholar] [CrossRef]
- Li, Q.; Wu, J.; Chen, Y.; Wang, J.; Gao, S.; Wu, Z. A new response approximation model of the quadrant detector using the optimized BP neural network. IEEE Sens. J. 2019, 20, 4345–4352. [Google Scholar] [CrossRef]
- Lin, S.F.; Sun, B.G.; Gao, H.; Lu, P.; Wang, J.H. The study of new signal processing technique in photon beam position monitors. In Proceedings of the 2005 Particle Accelerator Conference, Knoxville, TN, USA, 16–20 May 2005. [Google Scholar] [CrossRef]
- De Celis, R.; Cadarso, L. Spot-centroid determination algorithms in semiactive laser photodiodes for artillery applications. J. Sens. 2019, 2019, 7938415. [Google Scholar] [CrossRef] [Green Version]
- Shen, C.B.; Sun, B.G.; Ma, T.J.; Lu, P.; Lin, S.F.; Wang, X.H. Research of signal-processing methods in four-quadrant photodetector. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008. [Google Scholar]
- Zhang, J.; Zhou, W.; Mao, C.; Wu, C.; Peng, X.; Wan, M.; Qian, W. A calibration and correction method for the measurement system based on four-quadrant detector. Optik 2020, 204, 164226. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
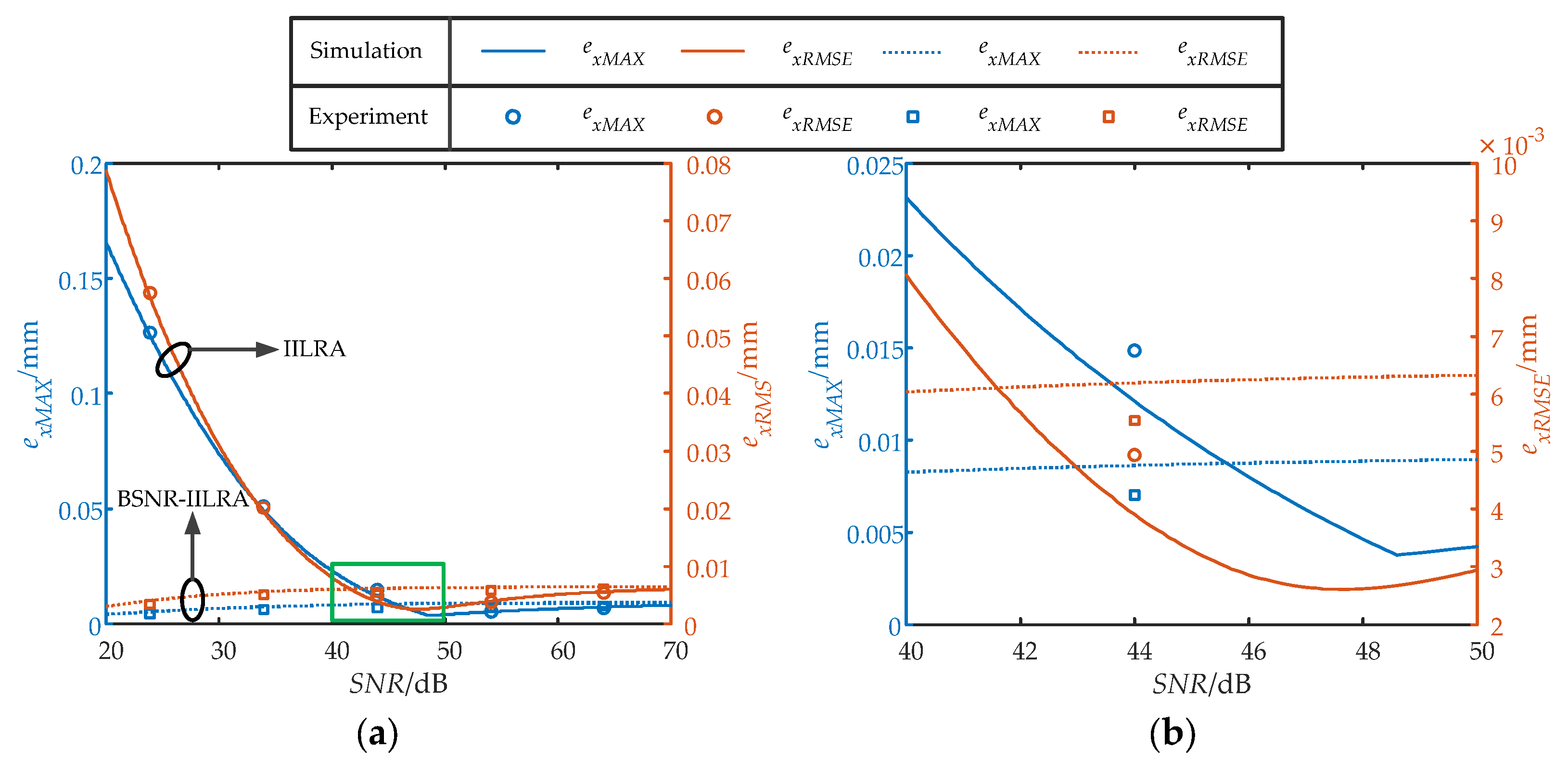
| SNR/dB | exMAX/mm | exRMSE/mm | ||||
|---|---|---|---|---|---|---|
| IILRA | BSNR-IILRA | CAA | IILRA | BSNR-IILRA | CAA | |
| 23.88 | 0.1265 | 0.0046 | 0.1399 | 0.0575 | 0.0034 | 0.0705 |
| 33.92 | 0.0511 | 0.0064 | 0.0519 | 0.0202 | 0.0049 | 0.0292 |
| 44.00 | 0.0149 | 0.0070 | 0.0168 | 0.0049 | 0.0055 | 0.0125 |
| 54.10 | 0.0054 | 0.0075 | 0.0132 | 0.0039 | 0.0059 | 0.0092 |
| 64.07 | 0.0070 | 0.0079 | 0.0189 | 0.0054 | 0.0062 | 0.0094 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, L.; Wu, Z.; Wu, J.; Gao, S.; Chen, Y.; Song, Y.; Wang, S. High-Precision Log-Ratio Spot Position Detection Algorithm with a Quadrant Detector under Different SNR Environments. Sensors 2022, 22, 3092. https://doi.org/10.3390/s22083092
Huo L, Wu Z, Wu J, Gao S, Chen Y, Song Y, Wang S. High-Precision Log-Ratio Spot Position Detection Algorithm with a Quadrant Detector under Different SNR Environments. Sensors. 2022; 22(8):3092. https://doi.org/10.3390/s22083092
Chicago/Turabian StyleHuo, Li, Zhiyong Wu, Jiabin Wu, Shijie Gao, Yunshan Chen, Yinuo Song, and Shuaifei Wang. 2022. "High-Precision Log-Ratio Spot Position Detection Algorithm with a Quadrant Detector under Different SNR Environments" Sensors 22, no. 8: 3092. https://doi.org/10.3390/s22083092