
A Novel DEM Block Adjustment Method for Spaceborne InSAR Using Constraint Slices


Abstract
:1. Introduction
2. Methods
2.1. Conventional Method and Shortcomings
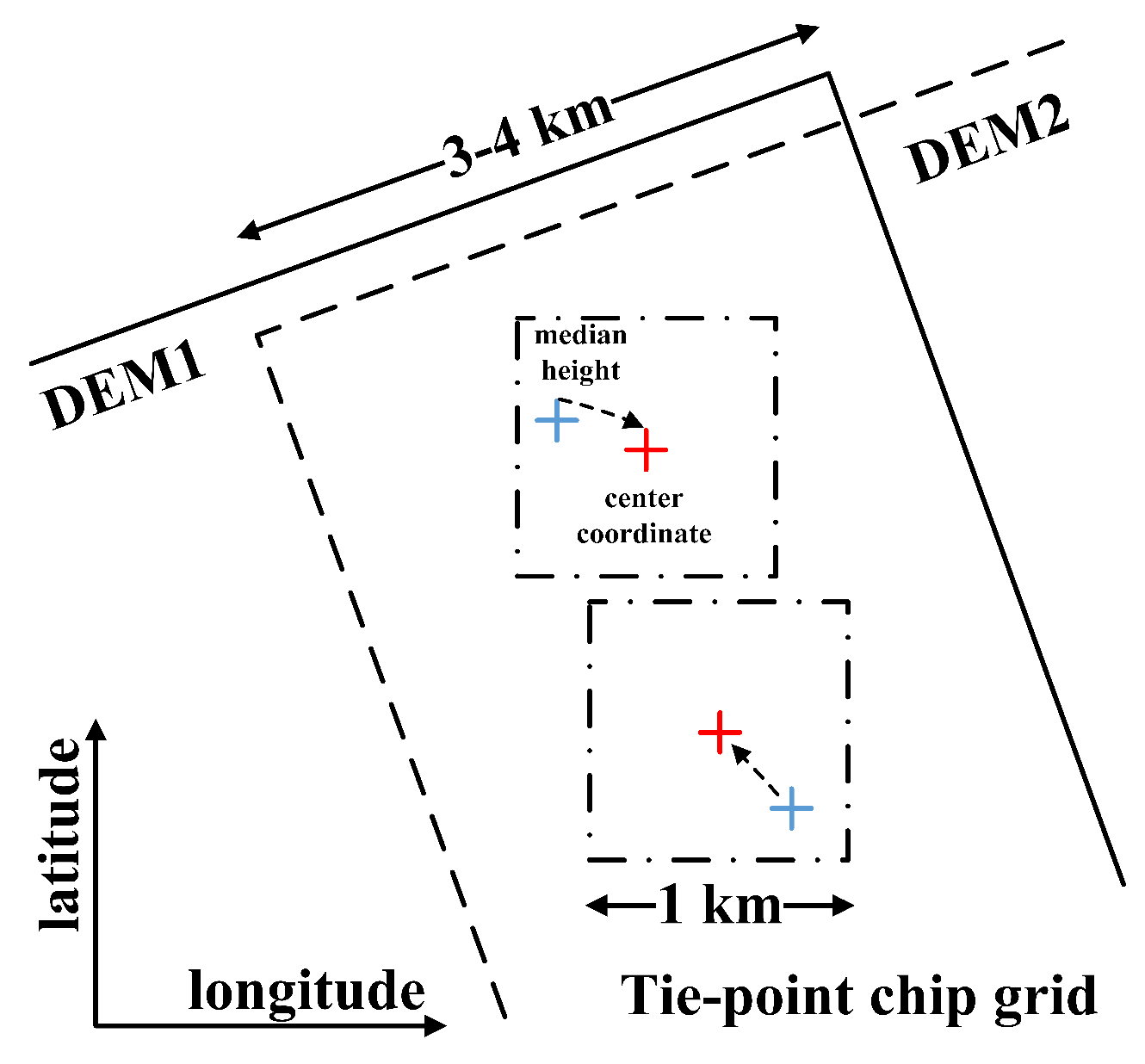
2.1.1. TP Chips
2.1.2. GCPs
2.1.3. Function Model
2.1.4. Shortcomings of the Function Model
2.2. Constraint Slice (CS) and Constraint Conditions
2.2.1. The Concept and Extraction of Constraint Slices
- i.
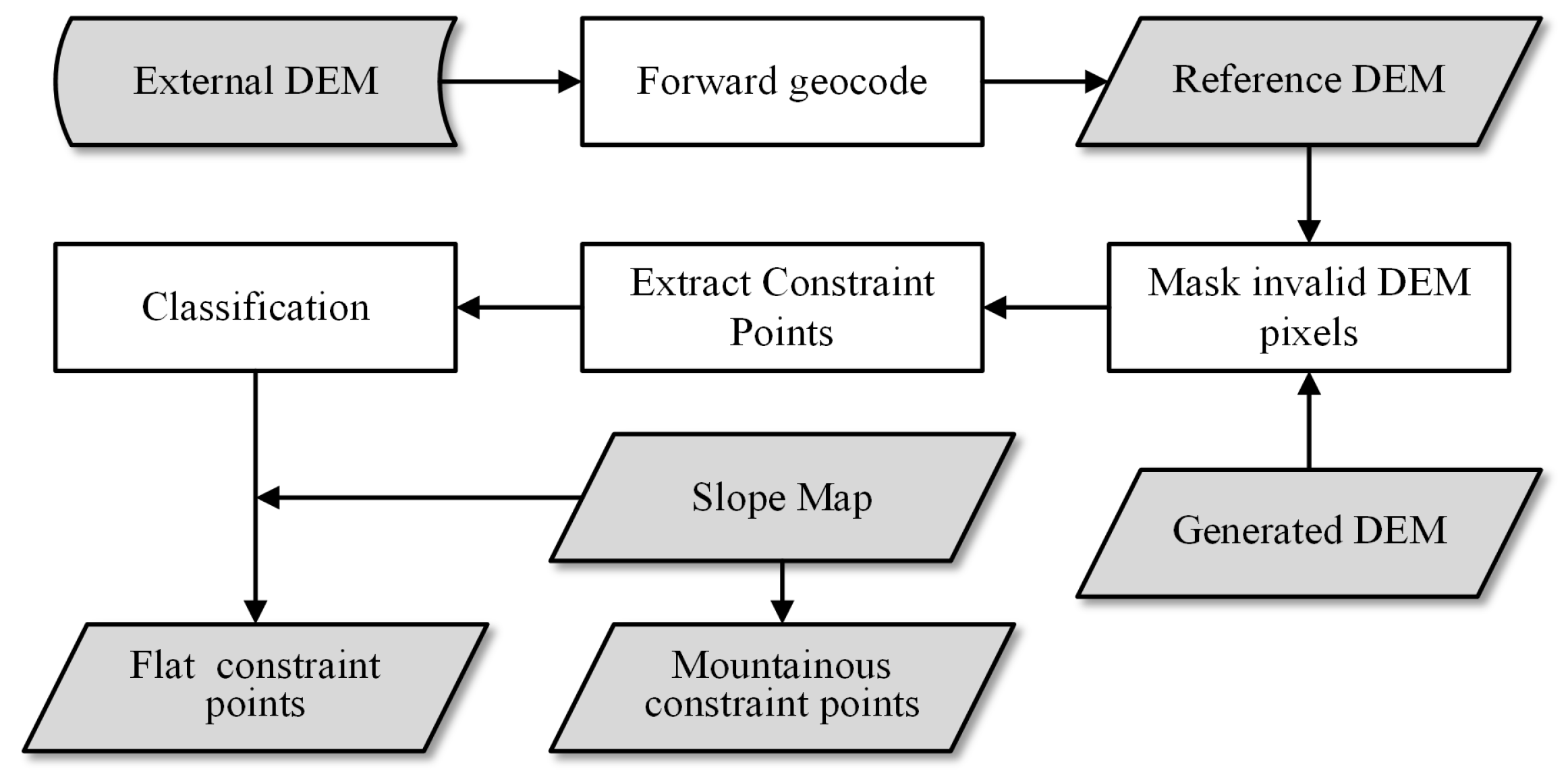
- Geocode the external DEM into the SAR coordinate system (i.e., forward geocoding). This step is usually performed after phase unwrapping because this results in an integer multiple of between the absolute phase and the unwrapped phase [4], which needs to be corrected by external DEM.
- ii.
- Generate the slope map of the reference DEM in the SAR coordinate system. Wang [26] provides a method for generating a slope map using DEM through calculating the gradients in the range and azimuth directions , using the Sobel operator and then converting them into a slope map according to Equation (9).
- iii.
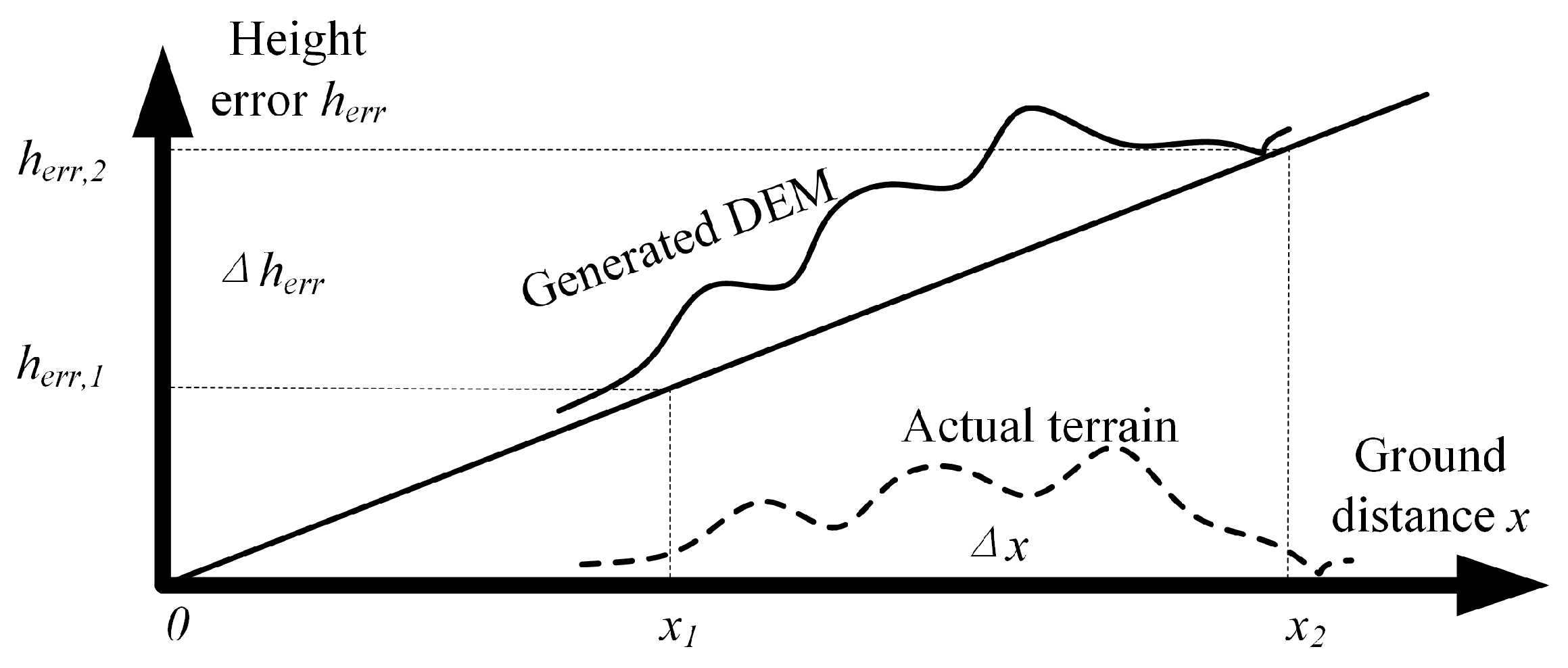
- Calculate the elevation differences between the generated and external DEM, and set the pixels with large elevation differences (e.g., greater than 50 m) as invalid pixels, including phase unwrapping error areas and low coherence areas in generated DEMs or elevation anomaly area in external DEMs.
- iv.
- Divide the geocoded DEM into several blocks at an interval of about 1 km. There are two sizes of TP chips in the existing literature, 1 km [10,24] and 500 m [11]. However, because the resolution of the external public DEM is often lower than that of CoSSC data, we assume that a grid can contain more elevation pixels, ensuring the reliability of the CSs. Therefore, inspired by the concept of TP chips and combined with the characteristics of public DEMs, we set the size of the CSs to 1 km. Then, calculate the histogram of each block in the generated and reference DEMs taking the median values of the histograms as their elevations and assign the center coordinates to each block. This part draws on lessons from the extraction method of TPs in Section 2.1.1 in order to avoid the influence of noise elevation outliers.
- v.
- Calculate the average slope of each block and divide the CSs into flat and mountainous areas, as the public DEM often shows different elevation accuracies in mountainous areas and plain areas [21,22]. When the experimental area contains complex terrain, considering only the flat area with the highest accuracy while ignoring the mountainous area will lead to insufficient CSs.
2.2.2. Transformation of Adjustment Model
3. Experiment and Discussion
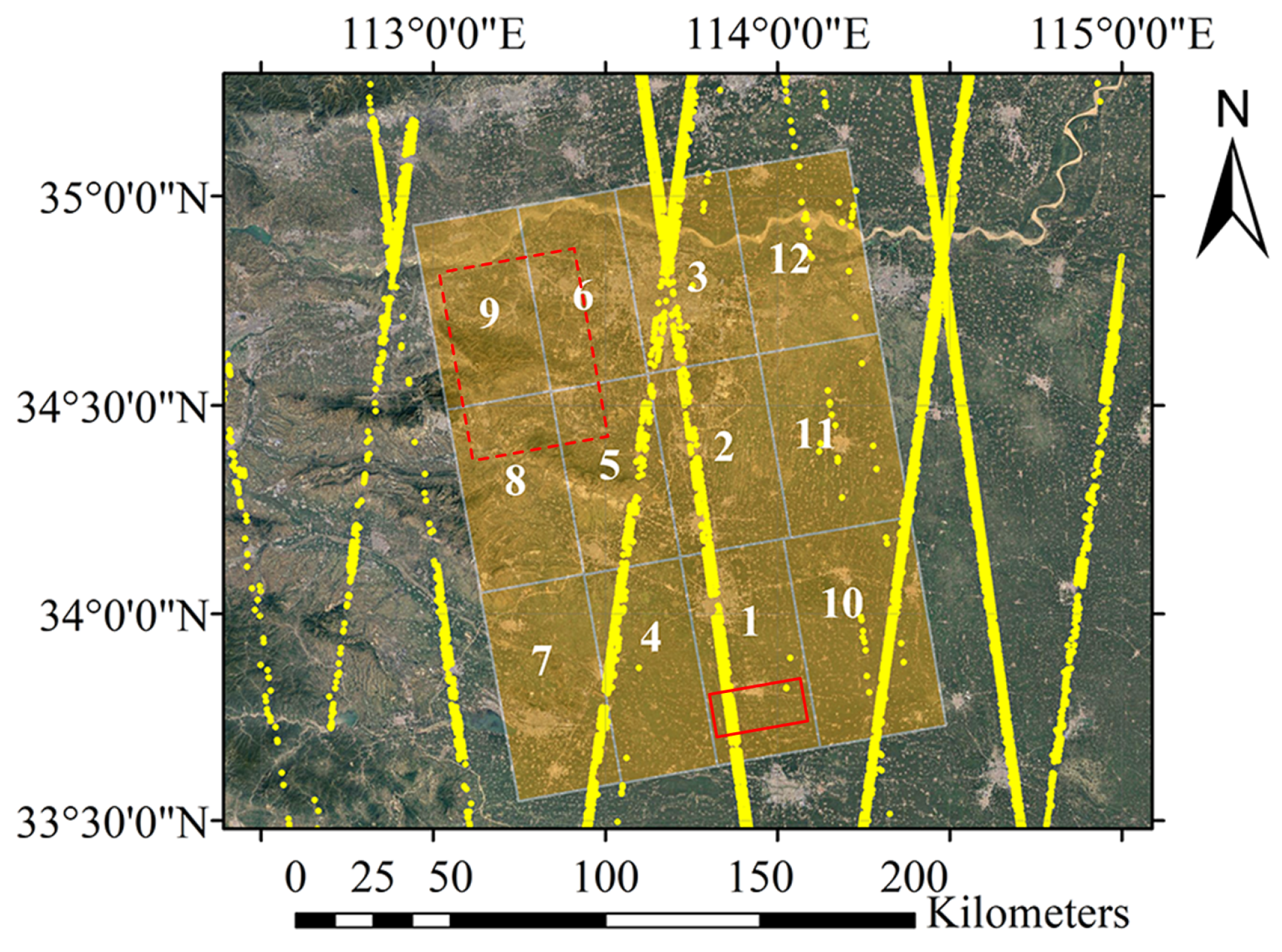
3.1. Experimental Data
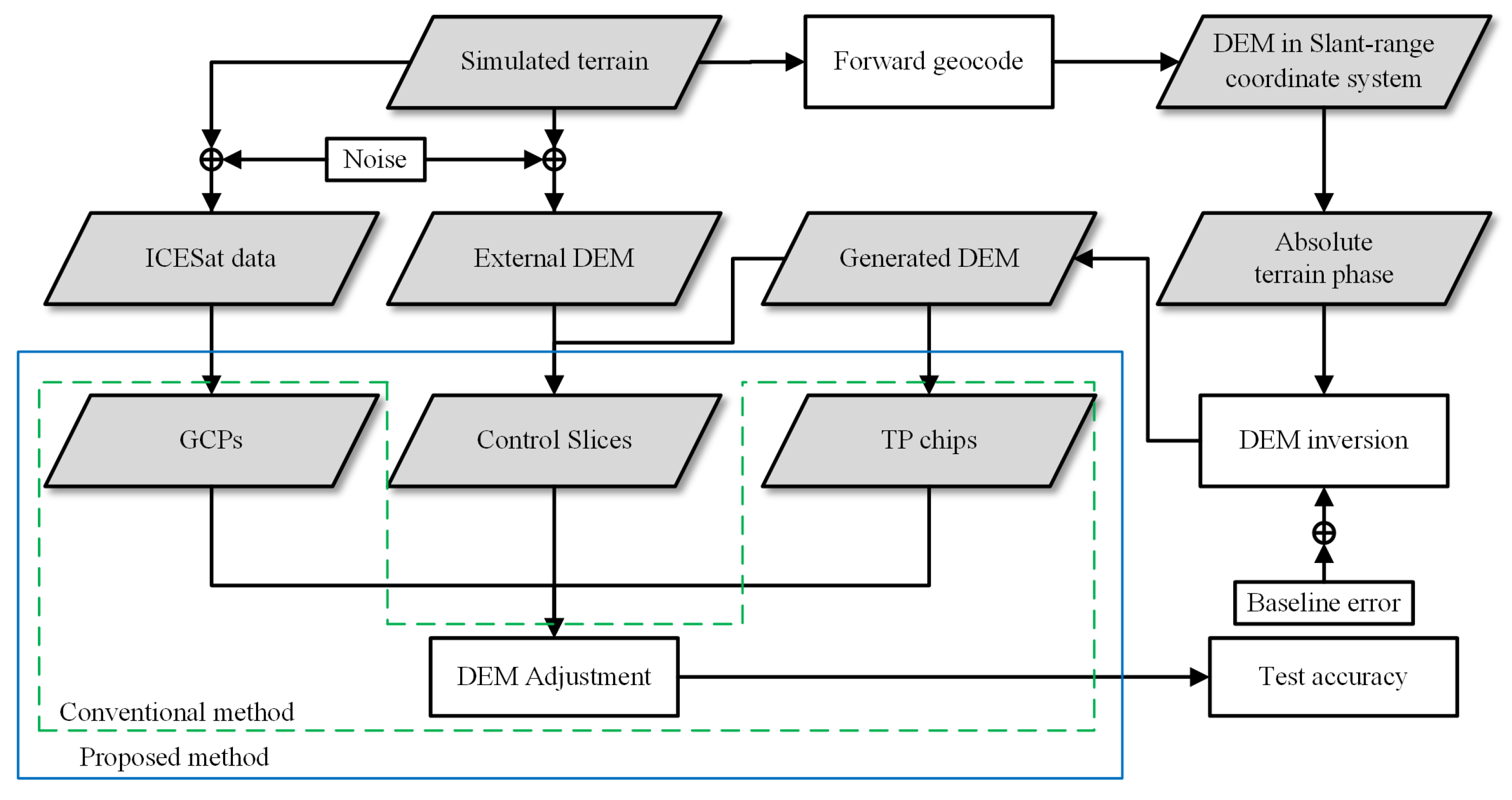
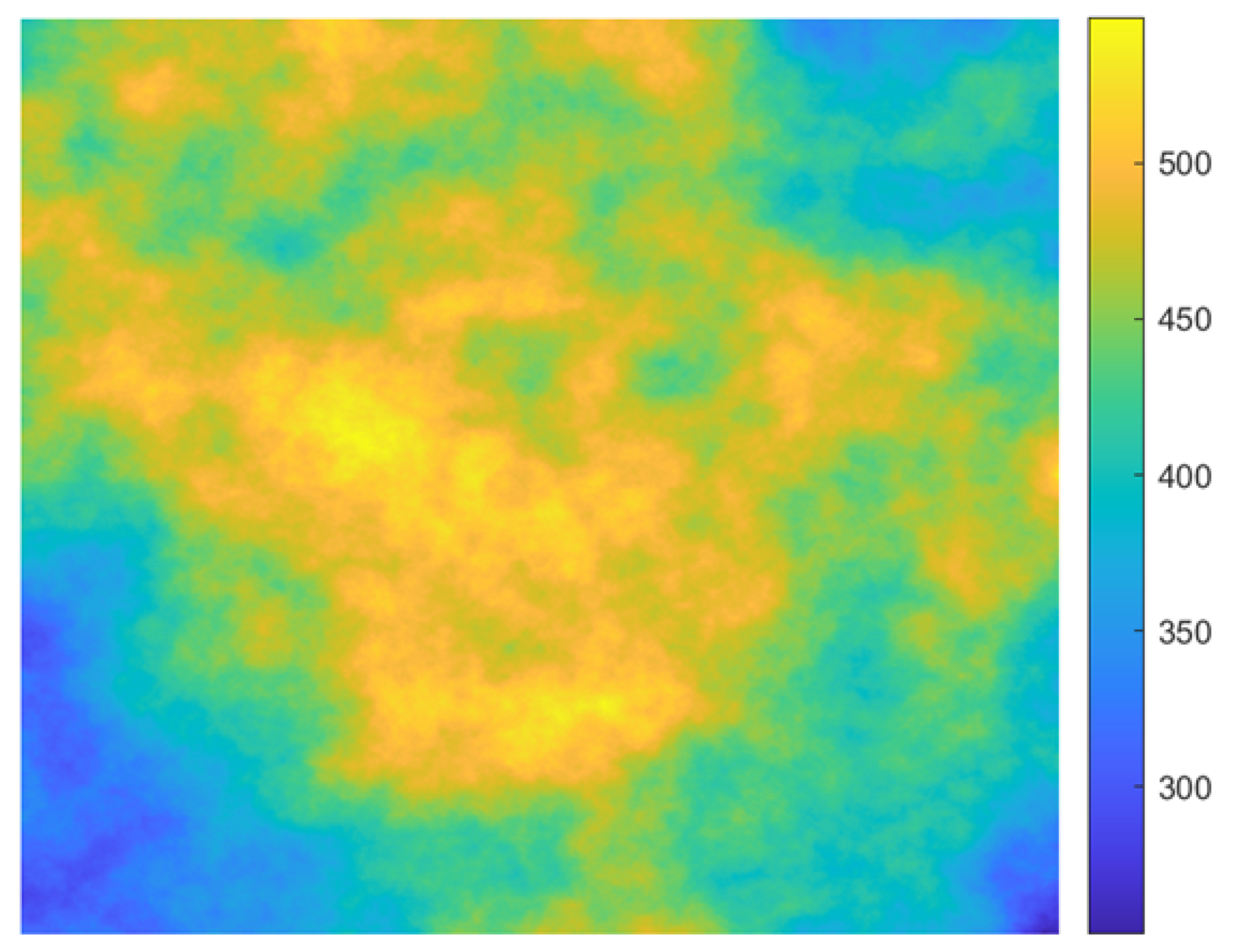
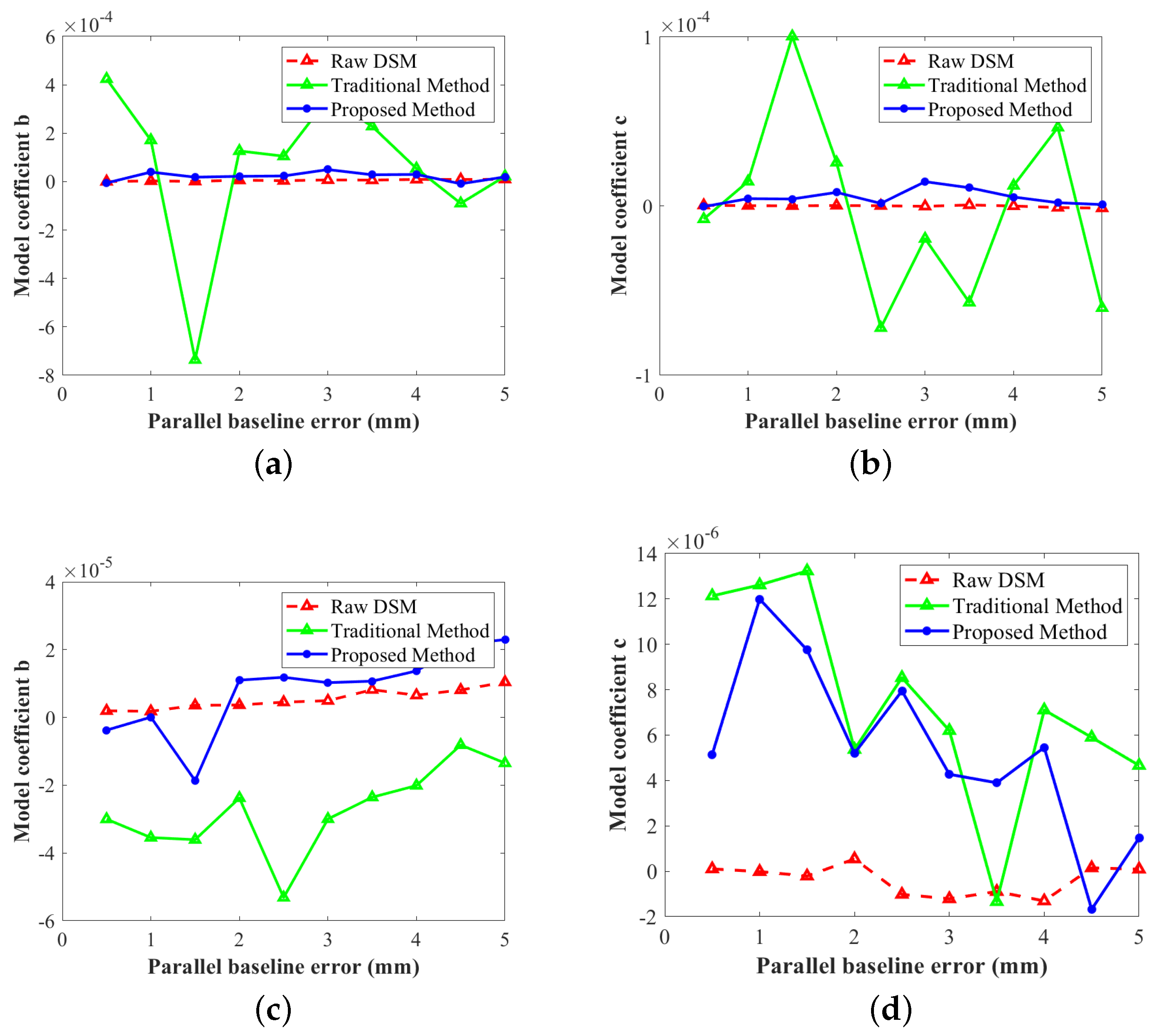
3.2. Simulated Data
- i
- ii
- Extract ICESat elevation data and generate external DEM. We used the actual geographical coordinates of the ICESat points to extract elevation data from the simulated terrain in step and added 0.5 m Gaussian noise. Similarly, we added 5.0 m Gaussian noise to the actual terrain as the external DEM.
- iii
- Geocode the simulated terrain. The simulated terrain is geocoded into the slant–range coordinate system using the real satellite orbit information. The geocoded DEM data are used to generate absolute interferometric phase and as the test set of adjustment results.
- iv
- Generate the absolute terrain phase using actual orbit information and the geocoded data from Step .
- v
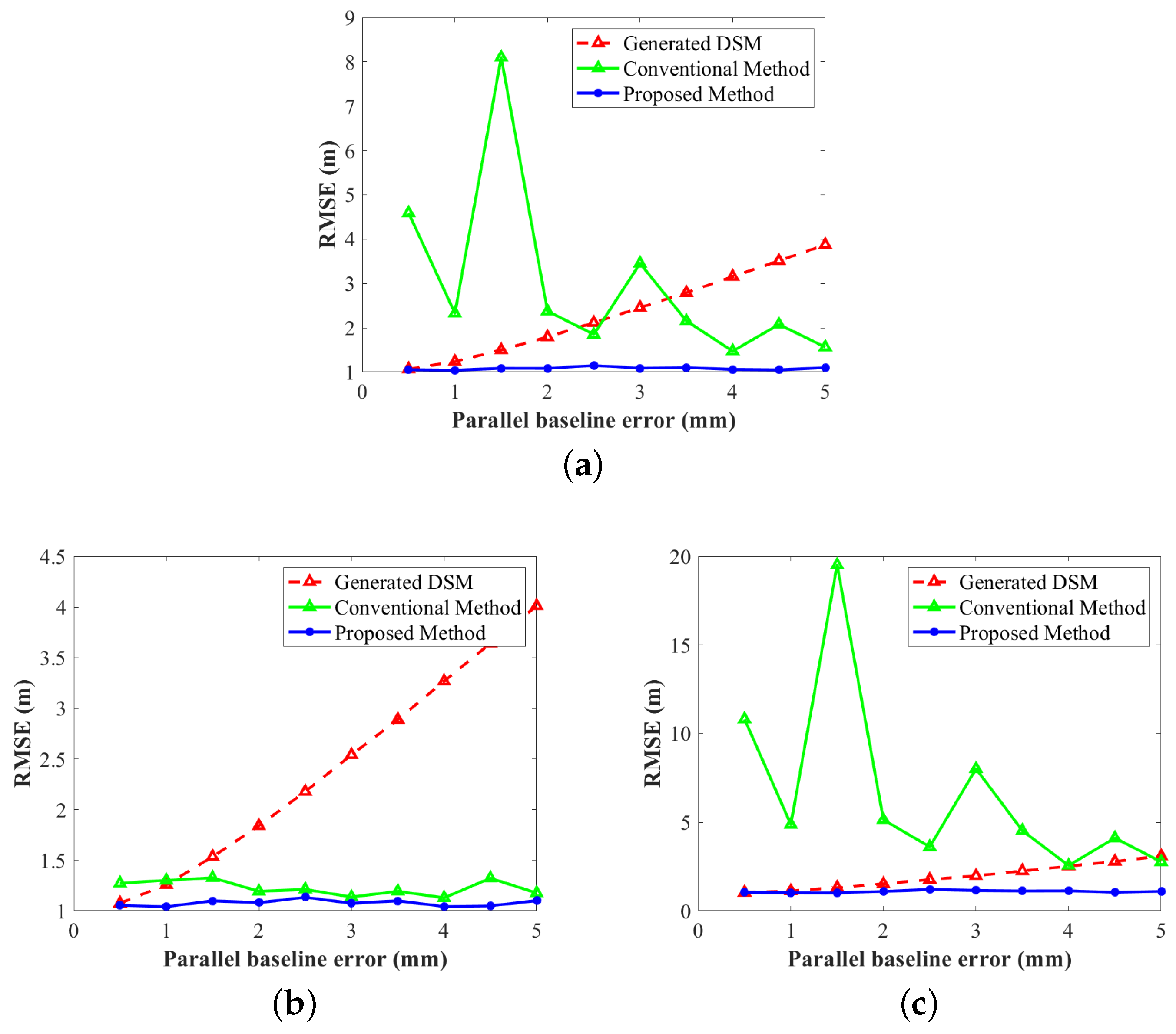
- Carry out InSAR processing, including removing the reference plane phase and generating DEMs. To the master and slave satellite orbit data used in this step were added baseline errors ranging from 0.5 mm to 5.0 mm. In addition, 1.0 m Gaussian noise was added to the generated DEMs. The simulated baseline and random height errors were set based on the actual situation. At present, the baseline accuracy of the bistatic InSAR system is usually on the order of millimeters [2,3]. The published global TanDEM-X DEM has a vertical accuracy of about 1.0 m [31]. Therefore, we chose 0.5 to 5 mm as the baseline error range and 1.0 m as the random noise of the simulated generated DEM.
- vi
- Carry out DEM block adjustment using the conventional and improved method. In the improved method, the CSs are extracted from the external DEM in Step . In addition, there is no distinction between mountains and flat land when adding noise in Step ; thus, the CSs are not distinguished.
- vii
- Accuracy check; checkpoints are evenly selected from the geocoded data from Step .
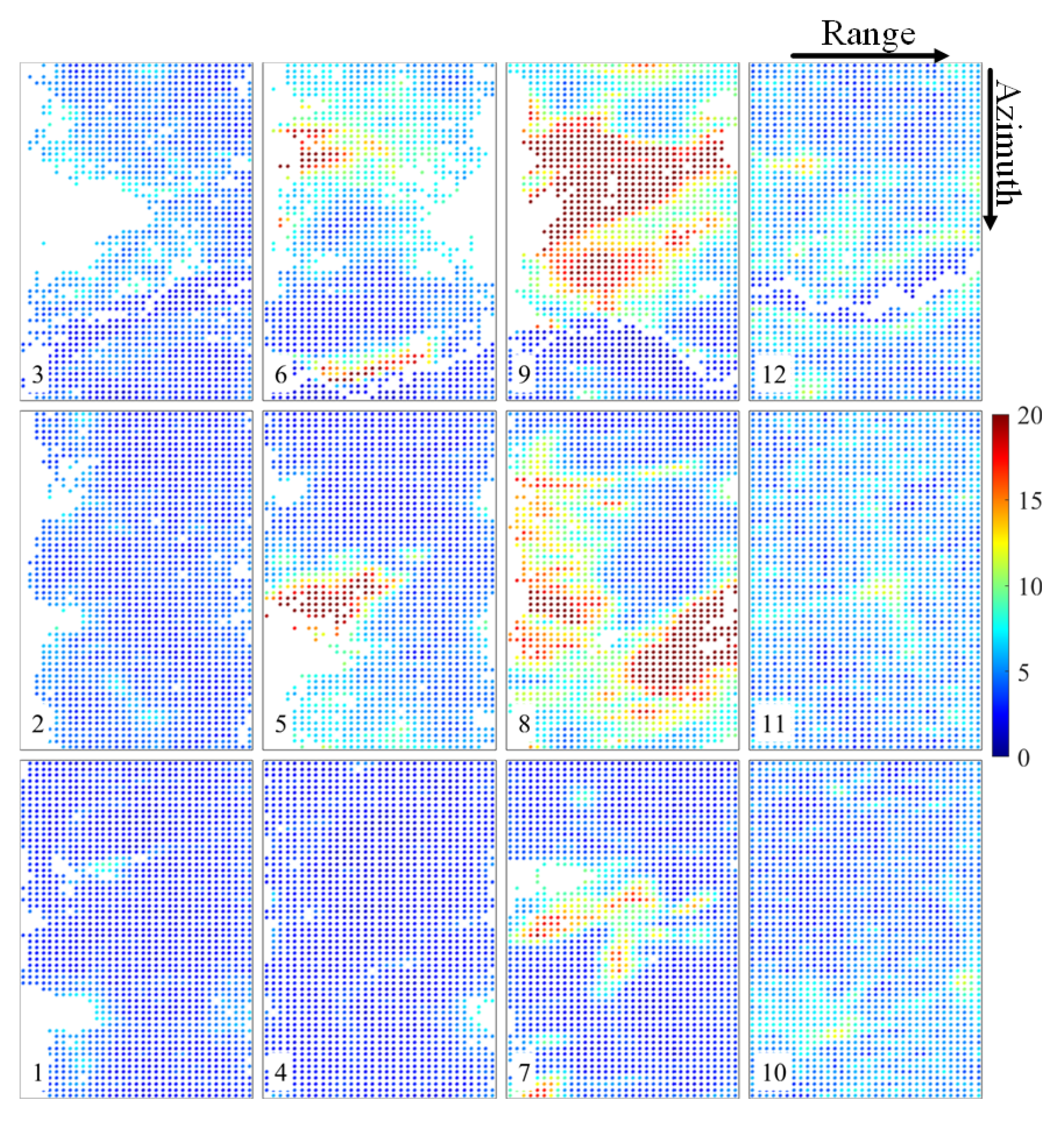
3.3. Real Data
3.3.1. Performance of Conventional Method in Uncontrolled Areas
3.3.2. Performance of Conventional Method in Controlled Areas
3.3.3. Performance of the Improved Method in Uncontrolled Areas
3.3.4. Performance of the Improved Method in Controlled Areas
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Influence of GCPs Distribution on Eigenvalues of Coefficient Matrix in the Conventional Model
Appendix B. Solution of the Constraint Model
References
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001; Volume 2. [Google Scholar]
- Kroes, R.; Montenbruck, O.; Bertiger, W.; Visser, P. Precise GRACE baseline determination using GPS. GPS Solut. 2005, 9, 21–31. [Google Scholar] [CrossRef]
- Antony, J.W.; Gonzalez, J.H.; Schwerdt, M.; Bachmann, M.; Krieger, G.; Zink, M. Results of the TanDEM-X baseline calibration. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1495–1501. [Google Scholar] [CrossRef]
- Rosen, P.; Hensley, S.; Joughin, I.; Li, F.; Madsen, S.; Rodriguez, E.; Goldstein, R. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Ma, J. Study on Block Adjustment of Airborne InSAR Data. Ph.D. Thesis, Institute of Electronics, Chinese Academy of Sciences, Beijing, China, 2012. [Google Scholar]
- Curlander, J.C. Location of Spaceborne Sar Imagery. IEEE Trans. Geosci. Remote Sens. 1982, GE-20, 359–364. [Google Scholar] [CrossRef]
- Gisinger, C.; Schubert, A.; Breit, H.; Garthwaite, M.; Balss, U.; Willberg, M.; Small, D.; Eineder, M.; Miranda, N. In-Depth Verification of Sentinel-1 and TerraSAR-X Geolocation Accuracy Using the Australian Corner Reflector Array. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1154–1181. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A Satellite Formation for High-Resolution SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef] [Green Version]
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M.; Niedermeier, A.; Vonavka, M. TerraSAR-X SAR Processing and Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–740. [Google Scholar] [CrossRef]
- Gruber, A.; Wessel, B.; Huber, M.; Roth, A. Operational TanDEM-X DEM calibration and first validation results. ISPRS J. Photogramm. Remote Sens. 2012, 73, 39–49. [Google Scholar] [CrossRef]
- Wessel, B.; Gruber, A.; Huber, M.; Roth, A. TanDEM-X: Block adjustment of interferometric height models. In Proceedings of the ISPRS Hannover Workshop 2009 “High-Resolution Earth Imaging for Geospatioal Information”, Hannover, Germany, 2–5 June 2009; International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: Hannover, Germany, 2009; pp. 1–6. [Google Scholar]
- Wessel, B. TanDEM-X Ground Segment–DEM Products Specification Document; German Aerospace Center: Cologne, Germany, 2018. [Google Scholar]
- Schutz, B.E.; Zwally, H.J.; Shuman, C.A.; Hancock, D.; DiMarzio, J.P. Overview of the ICESat mission. Geophys. Res. Lett. 2005, 32, 21. [Google Scholar] [CrossRef] [Green Version]
- González, J.H.; Bachmann, M.; Scheiber, R.; Andres, C.; Krieger, G. TanDEM-X DEM calibration and processing experiments with E-SAR. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; Volume 3, p. III-115. [Google Scholar]
- González, J.H.; Bachmann, M.; Krieger, G.; Fiedler, H. Development of the TanDEM-X calibration concept: Analysis of systematic errors. IEEE Trans. Geosci. Remote Sens. 2009, 48, 716–726. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zheng, M. Bundle block adjustment with self-calibration of long orbit CBERS-02B imagery. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B1, 291–296. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Jixian, Z.; Xiangyang, C.; Hong, A.N. Block-Adjustment with SPOT-5 Imagery and Sparse GCPs Based on RFM. Acta Geod. Cartogr. Sin. 2009, 38, 302–310. [Google Scholar]
- Rodriguez, E.; Morris, C.S.; Belz, J.E. A global assessment of the SRTM performance. Photogramm. Eng. Remote Sens. 2006, 72, 249–260. [Google Scholar] [CrossRef] [Green Version]
- Day, T.; Muller, J.P. Digital elevation model production by stereo-matching spot image-pairs: A comparison of algorithms. Image Vis. Comput. 1989, 7, 95–101. [Google Scholar] [CrossRef]
- Sugarbaker, L.; Constance, E.W.; Heidemann, H.K.; Jason, A.L.; Lucas, V.; Saghy, D.; Stoker, J.M. The 3D Elevation Program Initiative: A Call for Action; US Geological Survey: Reston, VA, USA, 2014.
- Talchabhadel, R.; Nakagawa, H.; Kawaike, K.; Yamanoi, K.; Thapa, B.R. Assessment of vertical accuracy of open source 30m resolution space-borne digital elevation models. Geomat. Nat. Hazards Risk 2021, 12, 939–960. [Google Scholar] [CrossRef]
- Li, H.; Zhao, J. Evaluation of the Newly Released Worldwide AW3D30 DEM Over Typical Landforms of China Using Two Global DEMs and ICESat/GLAS Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4430–4440. [Google Scholar] [CrossRef]
- Teo, T.A.; Chen, L.C.; Liu, C.L.; Tung, Y.C.; Wu, W.Y. DEM-Aided Block Adjustment for Satellite Images with Weak Convergence Geometry. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1907–1918. [Google Scholar] [CrossRef]
- Huber, M.; Gruber, A.; Wessel, B.; Breunig, M.; Wendleder, A. Validation of tie-point concepts by the DEM adjustment approach of TanDEM-X. In Proceedings of the Geoscience & Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010. [Google Scholar]
- del Rosario Gonzalez-Moradas, M.; Viveen, W. Evaluation of ASTER GDEM2, SRTMv3. 0, ALOS AW3D30 and TanDEM-X DEMs for the Peruvian Andes against highly accurate GNSS ground control points and geomorphological-hydrological metrics. Remote Sens. Environ. 2020, 237, 111509. [Google Scholar] [CrossRef]
- Wang, J. Research on Key Technology of Combined Block Adjustment of ICESat Laser Points and Optical Satellite Imagery. Ph.D. Thesis, Wuhan University, Wuhan, China, 2018. [Google Scholar]
- Chen, C.; Yang, S.; Li, Y. Accuracy assessment and correction of SRTM DEM using ICESat/GLAS data under data coregistration. Remote Sens. 2020, 12, 3435. [Google Scholar] [CrossRef]
- Bhang, K.J.; Schwartz, F.W.; Braun, A. Verification of the vertical error in C-band SRTM DEM using ICESat and Landsat-7, Otter Tail County, MN. IEEE Trans. Geosci. Remote Sens. 2006, 45, 36–44. [Google Scholar] [CrossRef]
- Chong, E.K.; Zak, S.H. An Introduction to Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Tian, X.; Shan, J. Comprehensive Evaluation of the ICESat-2 ATL08 Terrain Product. IEEE Trans. Geosci. Remote Sens. 2021, 1–15. [Google Scholar] [CrossRef]
- Wessel, B.; Huber, M.; Wohlfart, C.; Marschalk, U.; Kosmann, D.; Roth, A. Accuracy assessment of the global TanDEM-X Digital Elevation Model with GPS data. ISPRS J. Photogramm. Remote Sens. 2018, 139, 171–182. [Google Scholar] [CrossRef]
- Stewart, G.W. Stochastic perturbation theory. SIAM Rev. 1990, 32, 579–610. [Google Scholar] [CrossRef] [Green Version]
- Parlett, B.N. The Symmetric Eigenvalue Problem; SIAM: Philadelphia, PA, USA, 1998. [Google Scholar]
- Xiao, C. The Random Perturbation Analysis of Matrix Eigenvalue Problems. Ph.D. Thesis, Chongqing University, Chongqing, China, 2019. [Google Scholar]
- Jorge, N.; Stephen, J.W. Numerical Optimization; Spinger: Berlin/Heidelberg, Germany, 2006. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ex. No. | Uncontrolled Area Data | Number of GCPs |
|---|---|---|
| Ex. 1 | 8, 9 | 324 |
| Ex. 2 | 7–12 | 216 |
| Ex. 3 | 4–12 | 139 |
| Ex. 4 | 2–12 | 34 |
| Ex. No. | Ex. 1 | Ex. 2 | Ex. 3 | Ex. 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE of All / Controlled / Uncontrolled Area (m) | ||||||||||||
| Before Adjustment | 2.32 | 2.25 | 3.08 | 2.32 | 2.15 | 2.80 | 2.32 | 1.94 | 2.93 | 2.32 | 1.96 | 2.37 |
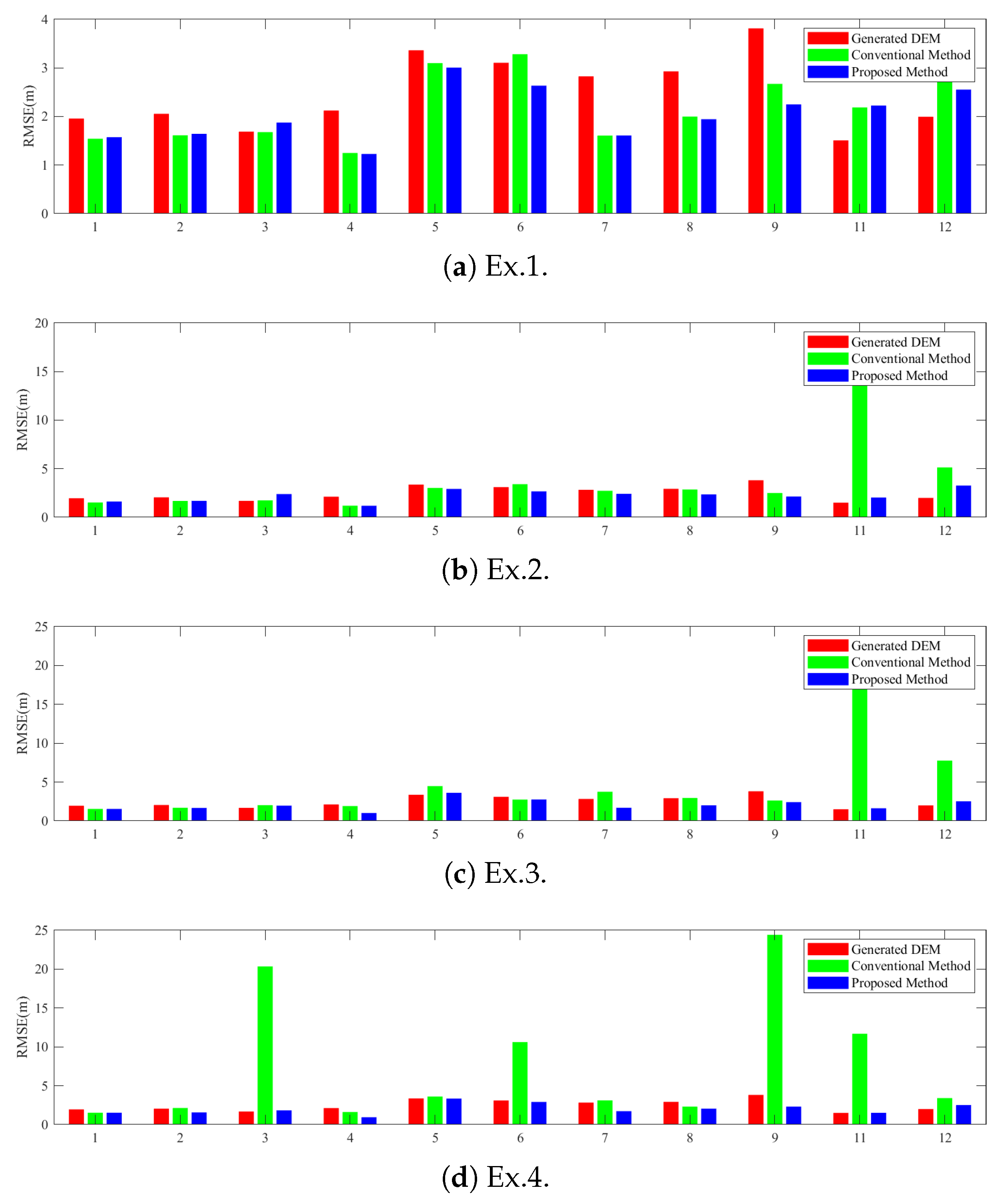
| Conventional Method | 1.91 | 1.90 | 2.12 | 2.42 | 1.94 | 3.54 | 2.99 | 1.77 | 4.51 | 9.78 | 1.53 | 10.41 |
| Proposed Method | 1.89 | 1.88 | 1.99 | 2.17 | 2.04 | 2.52 | 1.98 | 1.74 | 2.39 | 1.92 | 1.53 | 1.96 |
| Improvement | 0.02 | 0.02 | 0.13 | 0.25 | - | 1.02 | 1.01 | 0.03 | 2.12 | 7.86 | - | 8.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Chai, H.; Guo, B.; Zhang, L.; Lv, X. A Novel DEM Block Adjustment Method for Spaceborne InSAR Using Constraint Slices. Sensors 2022, 22, 3075. https://doi.org/10.3390/s22083075
Wang R, Chai H, Guo B, Zhang L, Lv X. A Novel DEM Block Adjustment Method for Spaceborne InSAR Using Constraint Slices. Sensors. 2022; 22(8):3075. https://doi.org/10.3390/s22083075
Chicago/Turabian StyleWang, Rui, Huiming Chai, Bin Guo, Li Zhang, and Xiaolei Lv. 2022. "A Novel DEM Block Adjustment Method for Spaceborne InSAR Using Constraint Slices" Sensors 22, no. 8: 3075. https://doi.org/10.3390/s22083075