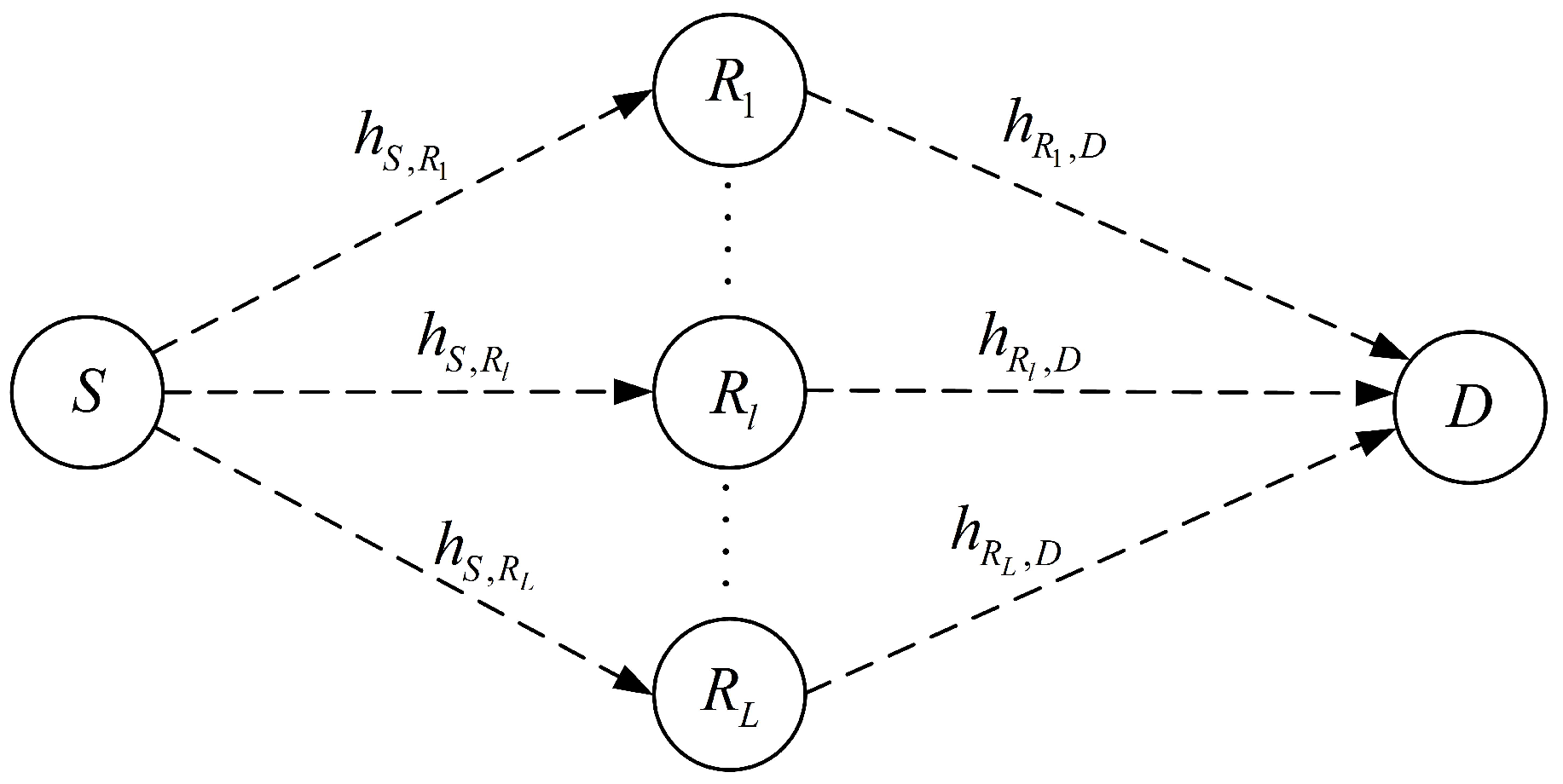
2. System Model
We consider the multi-relay wireless cooperative system similar to [
20,
21], where
L relay nodes assist the source node
S in transmitting the information data bits to the destination node
D, as shown in
Figure 1. The
L relay nodes, denoted by a set
, are assumed to be energy-limited and capable of harvesting energy from the received signal of
S. Each relay node uses the harvested energy to forward the source’s information to
D with AF protocol. It is assumed that there does not exist a direct link between the source and destination nodes due to limited transmit power or shadowing effects [
20,
21]. Each node is assumed to be equipped with a single antenna and all radio links are assumed to be subjected to independent and frequency non-selective quasi-static fading that the channels keep invariant during the entire communication block with a time duration of
T [
20,
31]. The channel coefficients from
S to the
lth
and from
to
D are denoted as
and
, respectively. All links are assumed to experience both small-scale Rician fading with Rician factor
and large-scale path loss effects with path loss exponent
, i.e., the channel coefficients
can be denoted as
, where
,
represents the small-scale Rician fading of the channel, and
is the distance between the nodes
i and
j. We assume perfect channel state information (CSI) for all of the nodes. In fact, the CSI can be obtained by channel estimation and instantaneous channel feedback, and due to quasistatic fading, the time overhead for the channel estimation from the transmitters to the receivers and the channel feedback from the receivers to the transmitters is negligible compared to the total transmission time [
32].
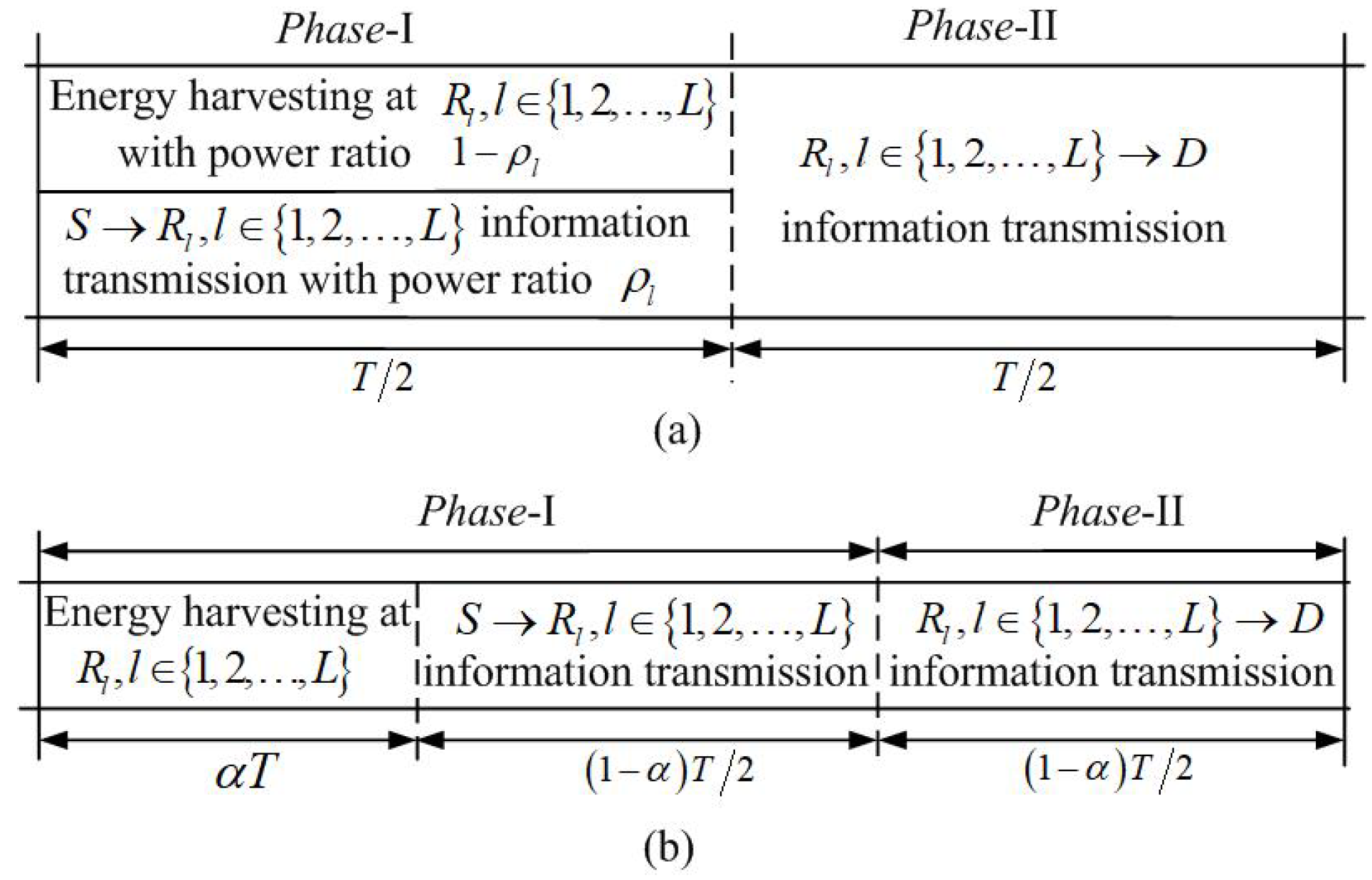
The data transmission of each communication block is divided into two time phases as in [
11,
12]. A half-duplex mode is applied to the relay nodes for the elimination of the two time phases’s mutual interference. In
phase-I, the source node broadcasts the information bits while the
L relay nodes receive the information and harvest the energy with the PS or TS receiver structure. In
phase-II,
S keeps silent and the
L relay nodes amplify the received information signal and forward it to
D using the energy harvested during
phase-I. The time slot structure for PS and TS schemes is shown in
Figure 2a,b, respectively, where
is the PS ratio for the PS receiver at
and
is the EH time ratio for the TS receiver at all relay nodes. Note that for TS scheme illustrated in
Figure 2b, the same EH time ratio is considered for all relay nodes, i.e.,
, where
is the EH time ratio of
. The reason for this is that the setting of the same EH time ratio can enhance the efficiency, since different EH time ratios may bring the problem that some relay has to wait until the other relays complete EH [
20]. In
phase-II, we assume that each relay uses a suitable space-time coding, e.g., distributed orthogonal space-time block coding (OSTBC) to achieve diversity gains for the data transmission from the relay nodes to the destination [
21,
33,
34].
We first consider the PS scheme as illustrated in
Figure 2a. For the transmission in
phase-I, the received baseband signal at
with PS scheme is given as:
where
is the transmit power of the source node
S,
is the information signal transmitted from
S, and
is the receive antenna noise at
. The received signal
at
is split into two signal streams during
phase-I. One signal stream is fed into the EH receiver with a power ratio of
, the other is used for the information decoding with a power ratio of
. The signal received at the information receiver (IR) at
can be expressed as [
11,
12]:
where
is the overall noise at
and
is the RF to baseband signal conversion noise of
. For the EH receiver of
, the received signal is given by
. Therefore, the input RF power at the EH receiver of
can be derived as
. When the linear EH model is considered, the energy conversion efficiency of the EH receiver at
is assumed to be a constant value
and the energy harvested at
is therefore given as [
11,
25]:
However, as pointed out before, the linear EH model is inaccurate in modeling realistic nonlinear EH circuit. In fact, it is shown that the output power of the EH receiver first linearly increases then keeps invariant (reaches to saturation) when the input power increases [
25]. Hence, here we consider the nonlinear EH model and use the piece-wise linear model that captures the nonlinear saturation characteristic for the EH receiver. The output direct-current (DC) power of the EH receiver at
is then given by [
3,
29,
31]:
where
is the maximum (saturation) power that can be harvested at the EH receiver of
and
is the energy conversion efficiency factor when the EH receiver of
is not saturated. The power that can be used for the transmission at
is then given as
.
For
phase-II transmission,
first amplifies
, then forwards it to
D, where the amplification factor
satisfies the average power constraint and can be denoted as [
11,
31]:
where
is the variance of
and
means expectation operation. The signal transmitted from
is then given as:
Since the OSTBC is adopted so that the transmission are mutually orthogonal in time domain for the relays in
phase-II, the end-to-end SNR at the receiver of the destination
D,
, is equal to the summation of the SNR of all the relay links, i.e.,
[
34], where
is the equivalent instantaneous SNR of the relay link (
). By using the similar way to [
11,
31,
35],
can be derived as:
where
is the variance of the overall noise
(consisting of the receive antenna noise and the RF to baseband signal conversion noise) over the link (
) at
D and
and
denote the instantaneous SNRs for the
and
links given by, respectively:
and:
where
is the power spectral density of complex additive white Gaussian noise (AWGN) and it is assumed that for all relay nodes, the power of the receive antenna noise equals to the RF to baseband signal conversion noise, and is the half of the power of total noise at the destination node [
12,
36], i.e.,
. The achievable information rate for the PS scheme can be given as
[
21,
33].
We then consider the same TS scheme as [
20,
37] that is illustrated in
Figure 2b, where the transmission time of
phase-I is divided into two parts. The first part of the transmission time with a duration of
is used for EH from the source’s RF signal received at
, while the second part of the transmission time with a duration of
is used for signal receiving at
. For the TS scheme, the signals received at
in
phase-I is given as
, where
is the overall noise consisting of the receive antenna noise and the RF to baseband signal conversion noise at
,
. The input RF power and corresponding output DC power of the energy harvester at
are given as
and
, respectively. Therefore, the energy harvested by
during
phase-I is given as
, and the power that can be used for the transmission at
is then given by:
During
phase-II,
amplifies the received information signal and forwards it to
D using the harvested energy
. Similarly to the PS scheme, the equivalent instantaneous SNR of the
relay link (
) for the TS scheme can be derived as:
where
and
represent the instantaneous SNRs of the
and
links given by, respectively:
and:
As illustrated in
Figure 2b, the time duration for the information transmission from each of the relay nodes to the destination is
. Hence, the achievable information rate for the TS scheme is
[
21,
33].
3. Problem Formulation and Solution
In this section, we consider maximizing the achievable information rate for the SWIPT multi-relay cooperative systems with TS and PS schemes applied to the EH receivers of the relay nodes. Note that for most optimization schemes, maximizing the achievable information rate is a general objective [
20,
21]. Our goal is to find the optimal PS ratio
for each relay node when the PS receiver is considered, and the optimal EH time ratio
for all of the relays when the TS receiver is used.
3.1. PS Scheme
We first consider the PS scheme. The achievable information rate maximization problem for the PS scheme can be formulated as:
The optimal problem (14) is non-convex, as its objective function is non-concave. Hence, the direct use of the convex optimization techniques cannot solve the problem. Fortunately, it can be found that
is a strictly monotonic increasing function of
. Therefore, the objective in (14), maximizing the achievable information rate
, is equivalent to maximizing
. Considering that
are independent to each other, hence, the summation term
in the objective function is decomposable, problem (14) can be decomposed into
L independent sub-problems with identical structure and each can be given as [
21]:
By substituting (8) and (9) into (15), it is found that (15) is still non-convex. We can solve the maximization problem (15) by minimizing
subject to the same constraint, namely, transforming (15) into:
Note that and are excluded from the constraint of (16) to ensure that the denominators of the objective function in (16) will not be zero. Let and be the optimal solutions of (15) and (16), respectively. Then, can be chosen from , 0, and 1 for maximizing . We will prove that the optimal problem (16) is convex as follows.
From (8), the first term of the objective function in (16) is given as
. It can be easily shown that for
,
is a strictly convex function of
. The reason for this is that the second derivative of
with respect to
x equals to
, which is positive in
. For the second term of the objective function in (16),
, we first prove that
is concave with respect to
in
. From (9),
can be rewritten as
. Obviously,
is concave since it is the pointwise minimum of linear functions
and
with respect to
. Since
is concave and positive,
is convex [
38]. Similarly, for the third term of the objective function in (16),
, we first prove that
is concave with respect to
in
. From (8) and (9),
can be expressed as:
Let and . It is readily found that and for all , where and are the second derivatives of and , respectively. Therefore, both and are concave with respect to x in . This means that is the pointwise minimum of two concave functions and with respect to , and hence, they are concave, such that is convex. Since all , , and are convex, their sum is convex and problem (16) is convex.
Although (16) is convex, it is non-smooth hence cannot be solved using the standard convex tools. Here, we use the proximal gradient method [
39,
40] to solve (16). Let
and
. Then, the problem (16) can be rewritten as:
Let
. By using the logarithmic barrier method, the inequality constrained minimization problem (21) can be transformed into the unconstrained minimization problem given as:
where we use
x to denote
for representation convenience,
,
, where
is the parameter that sets the accuracy of the logarithmic barrier method [
38]. The iterative algorithm based on Beck and Teboulle proximal gradient method [
39,
40] for solving (22) is given in Algorithm 1 as follows, where
is the gradient of
at
and
is the proximal operator of the scaled function
defined by:
where
is the step size that controls the extent to which the proximal operator maps points towards the minimum of
g [
39],
is the usual Euclidean norm,
is given by:
Remark 1. Complexity and optimality of Algorithm 1. Since the proximal gradient decent satisfies for both fixed step size λ and backtracking step size , the computational complexity or the convergence rate of Algorithm 1 is or , which also means that an order of iterations is required to obtain an ϵ-optimal solution for problem (22) [40,41]. Moreover, it can be proven that the generated sequence in Algorithm 1 converges to an optimal solution for problem (22) [41]. | Algorithm 1 Optimization of (22) with Proximal Gradient Method |
| 1: | Initialize:, , , , , |
| 2: | repeat |
| 3: | , |
| 4: | |
| 5: | |
| 6: | |
| 7: | until |
3.2. TS Scheme
Let
. To maximize the achievable information rate
of the TS scheme, the optimal problem is then formulated as:
It can be proven that the objective function in (25) is concave (see
Appendix A for detailed proof) so that the problem (25) is convex. By solving (25) using standard convex tools, e.g., the interior point method [
38], the optimal EH time ratio
for the relays with TS scheme,
can be obtained.
3.3. Asymptotic Analysis for the Maximum Achievable End-to-End Rate
In this section, in order to get more intuitive insight about the effect of nonlinear EH model on achievable information rate maximization for the system with TS and PS schemes, we analyze the asymptotic maximum achievable information rate for the system with nonlinear EH model in the region of low and high input SNRs, say and with fixed noise power and saturation harvested power , which is then compared with traditional linear EH model so as to further investigate the impact of the resource allocation mismatch caused by using a traditional linear EH model.
3.3.1. Asymptotic Analysis for the PS Scheme
By substituting (17)–(19) into (7),
can be rewritten as:
From (14) and (26), the practical maximum achievable information rate is given by:
Let
and
be the optimal PS ratio
obtained for relay
with the linear and nonlinear EH models, respectively. Since the practical EH circuits at the relay nodes are nonlinear, the practical maximum achievable information rate is given as (27) whether the linear and nonlinear EH models are used. Then, from (27), by substituting
with
and
, the practical maximum achievable information rate, when the linear and nonlinear EH models are used, can be, respectively, expressed as:
and:
Case 1 (Low Input SNR) with : When , it can be obtained from (17) that . Then, from (28) and (29), the practical maximum achievable information rate is equal to zero whether the nonlinear or linear EH model is used for the EH receivers at the relay nodes, which means that the maximum achievable rate is the same for both EH models when . Actually, when is so small that and , i.e., the EH receivers have small input power and are not saturated, the nonlinear EH model has the same effect on system performance as the linear EH model. In this case, the nonlinear EH model is essentially equivalent to traditional linear one, which results in the same optimal PS ratios and and, therefore, brings the same system performance for both EH models.
Case 2 (High Input SNR) with : when , it can be obtained from (17) and (18) that and such that and . Then, from (28) and (29), the practical maximum achievable information rate, when the linear or nonlinear EH models are used, can be derived as and , which means that for high SNR, the maximum achievable rate is the same for both EH models.
3.3.2. Asymptotic Analysis for the TS Scheme
Let
be the optimal TS ratio. Then, from (11) and (25), the maximum achievable information rate can be expressed as:
where
and
are given as (36) and (37) in Appendix, respectively.
Case 1 (Low Input SNR) with : when , it can be obtained from (37) that . Then, from (30), the practical maximum achievable information rate is equal to zero for both the nonlinear and linear EH models. Similarly to the PS scheme, when is so small that the input RF power does not saturate the EH receiver, the same optimal TS ratios can be obtained, leading to the same maximum achievable information rate for both the linear and nonlinear EH models.
Case 2 (High Input SNR) with
: When
, it can be obtained from (19), (36) and (37) that
and
. Then from (30), the practical maximum achievable information rate can be expressed as:
Let
and
be the optimal TS ratios
when the linear and nonlinear EH models are used, which can be obtained by solving the optimal problem (25) and given as:
and:
where
. When
, it can be obtained that
,
, and
. Then, (32) and (33), respectively, can be rewritten as:
and:
Let and be the practical maximum achievable information rates for the linear and nonlinear EH models, which can be obtained from (31) by substituting with and , respectively. From (34) and (35), it can be obtained that when , and thus , whereas does not changes with such that is invariable when changes.
4. Numerical Results
In this section, numerical results are presented to demonstrate the performance of the SWIPT multi-relay cooperative system with nonlinear EH model for the proposed PS scheme (14) and TS scheme (25). For comparison, the numerical results for the system with traditional linear EH model are also depicted. With the linear EH model, for the PS scheme (14), the energy harvested at the relay nodes is given as (3) rather than (4), while for the TS scheme (25), the power that can be used for the transmission at
is given as
rather than (10). We consider that all nodes are located in a two-dimensional plane, and that the
L relay nodes are randomly but uniformly distributed within a circle (called the relay nodes circle) with a radius of 1 meter. The center of the circle is located on the straight line between
S and
D. The distance between
S and the center of the relay nodes circle, and between the center of the relay nodes circle and
D, are denoted as
and
, respectively. Unless otherwise specified, the simulation parameters for the numerical examples are set as follows. The number of the relay nodes is equal to 5. The transmission power of
S is set to
dBm. For each relay node
, the harvested saturation power
and the energy conversion efficiency factor
when the EH circuit is not saturated, is assume to be the same and set to
mW and
as in [
25,
31], respectively. The results in this section are obtained by averaging over 1000 channel including small-scale Rician fading and large-scale path loss realizations.
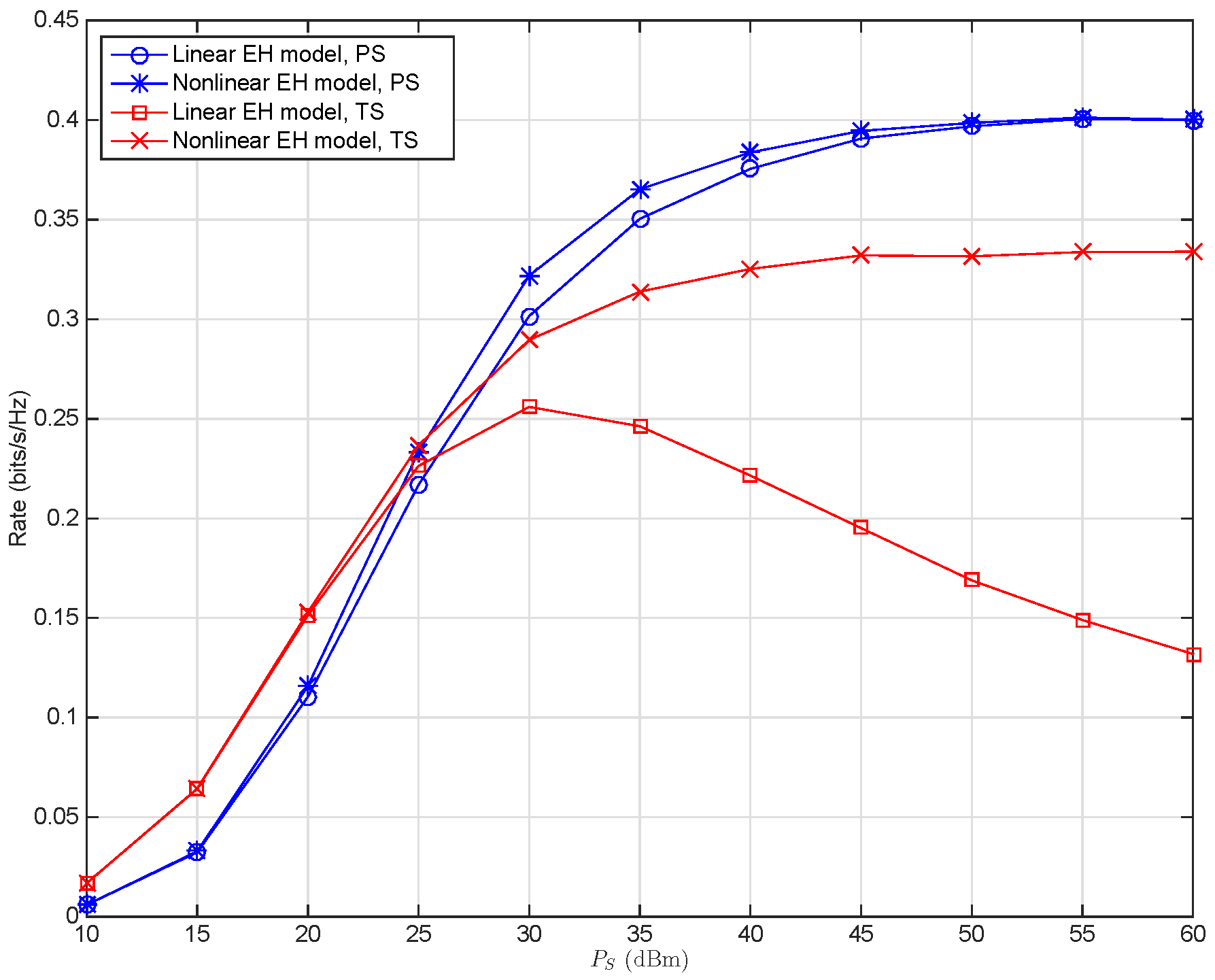
In
Figure 3, the maximum achievable rate is depicted for the SWIPT wireless multi-relay systems with various transmit power
. It can be observed that when the nonlinear EH model is used for the optimization, for larger input SNR, the PS scheme outperforms the TS scheme, whereas for smaller input SNR, the opposite result can be observed, where the input SNR is denoted as
. This observation is the same as the results in [
21,
37] for the SWIPT relay systems with the linear EH model. It shows that for the nonlinear EH model, both the maximum achievable rates of the system with the TS and PS schemes monotonically increase with the transmit power
, whereas when the linear EH model is applied to the system, for the PS scheme, the maximum achievable rate is still a monotonically increasing function with respect to
, while for the TS scheme, it is a concave function of
. From another perspective, the use of the linear EH model leads to different degrees of performance degradation for the TS and PS schemes. Specifically, the nonlinear EH model is significantly superior to the linear EH model in the system performance for the proposed TS scheme in the region of both medium and high SNRs, whereas it slightly outperforms the linear EH model for the PS scheme only in the range of medium SNR. Compared with the nonlinear EH model, the system performance degradation of the linear EH model is due to the resource allocation mismatch, which is caused by using the linear EH model, while it does not account for the nonlinear characteristic of the EH circuits and the saturation of the input RF power [
25].
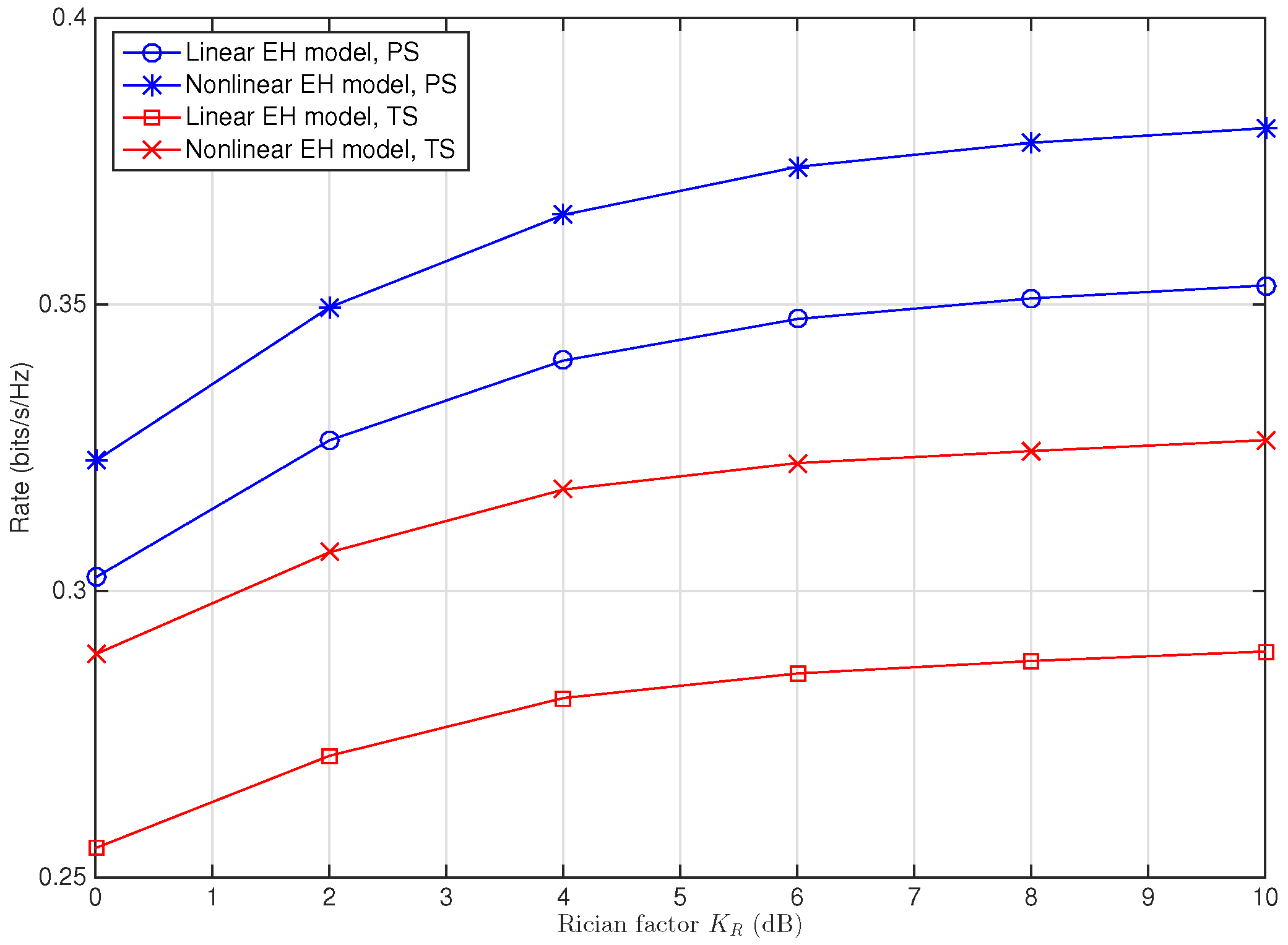
Remark 2. Asymptotic Performance of the nonlinear EH model. It can be observed in Figure 3 that in the low input SNR region, the system performance of the nonlinear EH model is same as that of the linear EH model for both the TS and PS schemes, while in the region of high input SNR, the system performance of the nonlinear EH model, compared to that of the linear EH model, is also the same for the PS scheme, whereas it is much different for the TS scheme. The reason is that, as analyzed in Section 3, low input SNR makes the nonlinear EH model equivalent to the linear one, which results in the same optimal PS ratio or TS ratio , and therefore, brings the same system performance for nonlinear and linear EH models, and that in the region of high input SNR, for the PS scheme, the practical maximum achievable rate of the system is the same and tends to be invariable for both EH models, whereas for the TS scheme, it tends to be zero for the linear EH model and invariable for the nonlinear EH model. Remark 3. Resource allocation mismatch of the linear EH model. The performance of the system with the linear EH model, compared to that with the nonlinear EH model, is slightly changed for the PS scheme, whereas it significantly declined for the TS scheme, implying that the impact of the resource allocation mismatch brought by the use of traditional linear EH model is inconspicuous for the PS scheme, whereas this is much more serious for the TS scheme, especially in higher SNRs. Specifically, it is shown in Figure 3 that in the region of high SNR, the maximum achievable rate for the TS scheme even decreases for the linear EH model while keeps invariant for the nonlinear EH model when the SNR increases. The reason is that, as analyzed in Section 3, for high input SNR, the optimal TS ratio for the nonlinear EH model keeps invariable as changes, whereas the optimal TS ratio for linear EH model gets smaller when the SNR increases ( when ), as shown in Table 1. From (31), in the region of high input SNR, the decreasing optimal TS ratio will lead to a more rapid decrease in the received SNR at D denoted as than the increase in the information transmission time ratio , and therefore, leading to the decrease in the practical maximum achievable rate for the system with nonlinear EH circuit. Figure 4 shows the impact of variation of Rician factor
on the maximum achievable rate for the system with a medium level of SNR (
dB). It can be observed that for both the TS and PS schemes, the rate increases as
increases whether the nonlinear EH model or linear EH model is considered, since a larger Rician factor
means a better channel condition. It is shown that compared with the conventional linear EH model, both the TS and PS schemes obtain performance gain despite the variation of Rician factor
when the the nonlinear EH model is adopted. Moreover, the performance gain is more larger for the TS scheme than that for the PS scheme when
is same. On the other hand, it is shown that the performance gap between the linear and nonlinear EH models does not change much for the TS scheme, while it obviously increases for the PS scheme when
increases. Specifically, the performance gap increases
(from 0.0203 bits/s/Hz to 0.0275 bits/s/Hz) for the PS scheme while it increases
(from 0.0338 bits/s/Hz to 0.0369 bits/s/Hz) for the TS scheme when
increases from 0 dB to 10 dB.
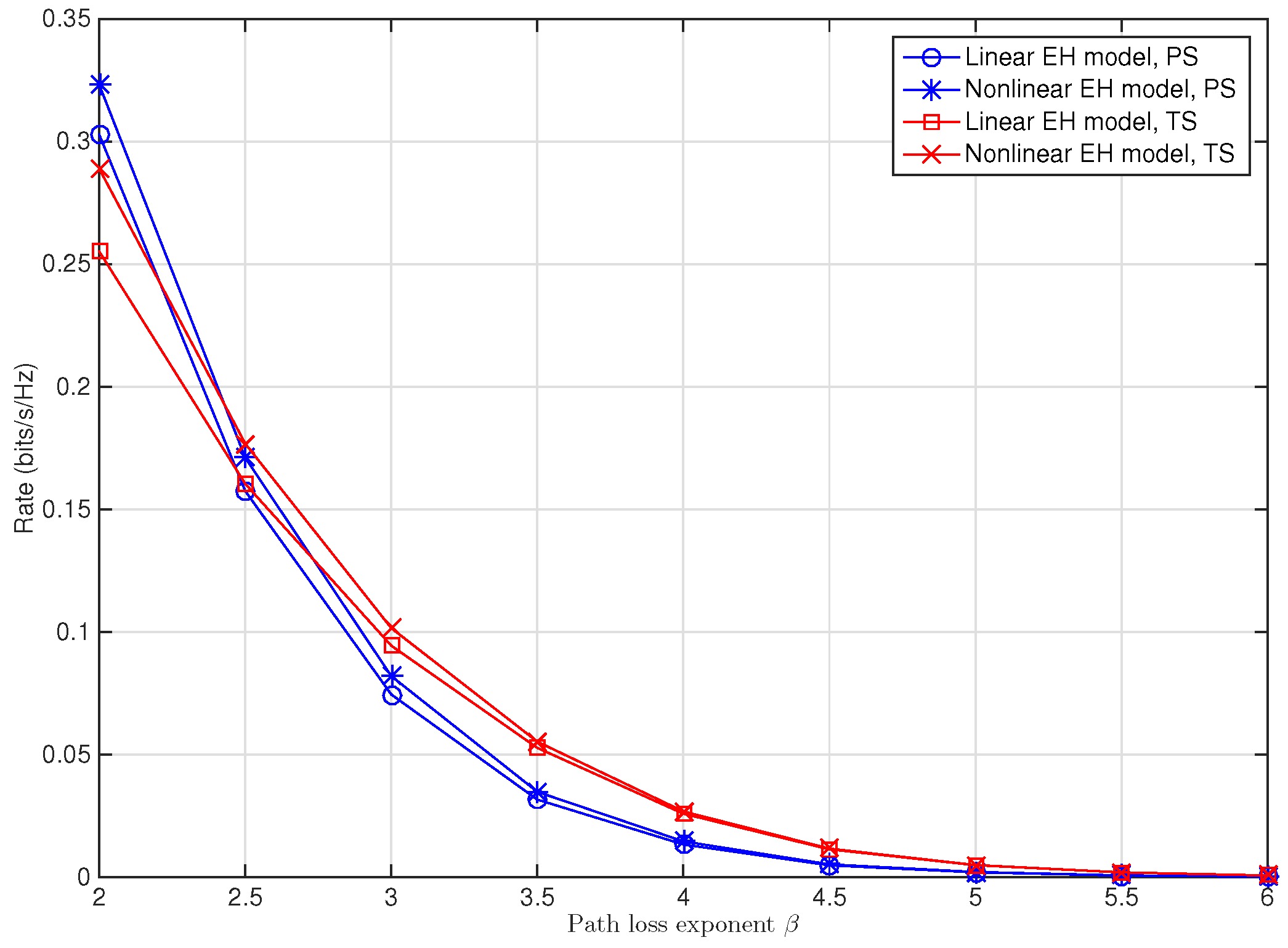
In
Figure 5, the maximum achievable rate is plotted against the path loss exponent
. Not surprisingly, it is shown that the rate decreases rapidly as
increases for both PS and TS schemes, since a larger path loss exponent means a much more transmission loss. Moreover, it is shown that the maximum achievable rate for the PS scheme decreases more rapidly than the TS scheme when
increases, which means that the PS scheme is more susceptible to the variation of path loss exponent. As for the performance degradation due to the resource allocation mismatch brought by using linear EH model instead of the nonlinear one, it is demonstrated that for the same value of
, the performance gap between the linear EH and nonlinear EH models for the TS scheme is more larger than that for the PS scheme, and that when
gets larger, the gap becomes smaller until it disappears for both of the TS and PS schemes. The reason is that the larger path loss exponent brings much more transmission loss and means smaller SNR, so that the input RF power dose not saturate the EH receiver. As mentioned before, this leads to the same optimal PS ratio
or TS ratio
, and thus, brings the same system performance for the nonlinear and linear EH models. It can be observed that for smaller
, the PS scheme outperforms the TS scheme, whereas for larger
, the result is opposite. This is in line with the observation in
Figure 3 that for larger SNR, the PS scheme is superior to the TS scheme, whereas for smaller SNR, the TS scheme is superior, since a smaller
means a higher received SNR.
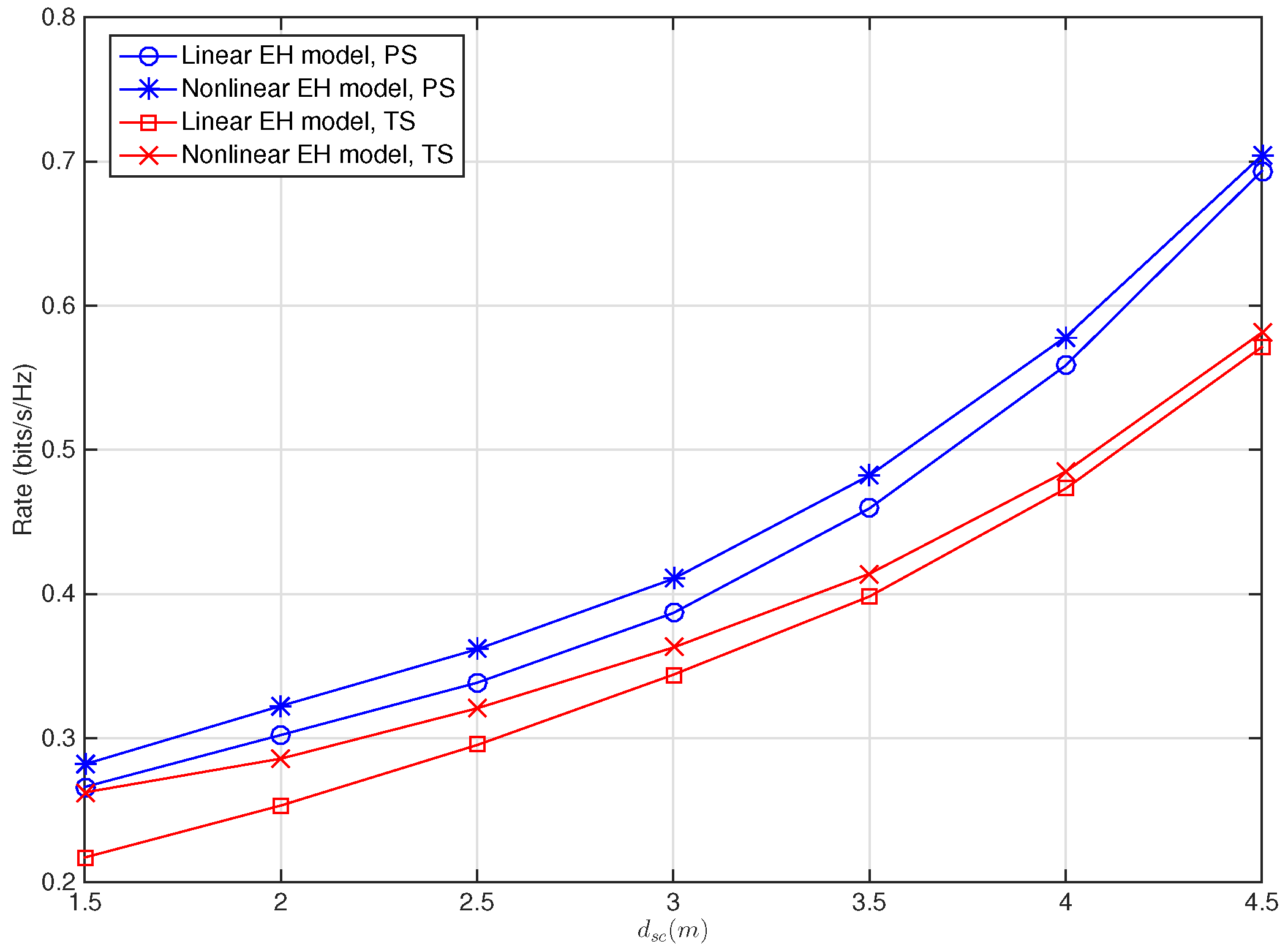
Figure 6 demonstrates the impact of the location of the relay nodes denoted by
on the maximum achievable rate. It can be observed that the performance gets worse as
decreases for both the PS and TS schemes. This observation is aligned with that in [
31], where single relay with nonlinear EH model is considered for the SWIPT relay systems. It is also shown that the PS scheme is more susceptible to the variation of
than the TS scheme, i.e., the maximum achievable rate for the PS scheme increases more rapidly than the TS scheme when
increases, whereas the performance gap between the linear and nonlinear EH models for the TS scheme is larger than that for the PS scheme, especially for smaller
.
Remark 4. Channel susceptibility of the PS and TS schemes. Figure 3, Figure 4, Figure 5 and Figure 6 show that, for given channel parameters Rician factor , path loss exponent β, and relays’ location denoted by , using a linear EH model in modeling the practical EH circuit brings larger performance degradation for the system with the TS scheme than that with the PS scheme, implying that the TS scheme is more susceptible to the resource allocation mismatch caused by using the linear EH model than the PS scheme. Conversely, for the variation of the relays’ location, Rician factor , and path loss exponent β, more rapid performance change can be observed for the PS scheme, implying that the PS scheme is more susceptible to the variation of the channels than the TS scheme. 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}